多AGV路径规划 改进A* astar 或者改进蚁群 aco 机器人间有优先级 动态路径规划
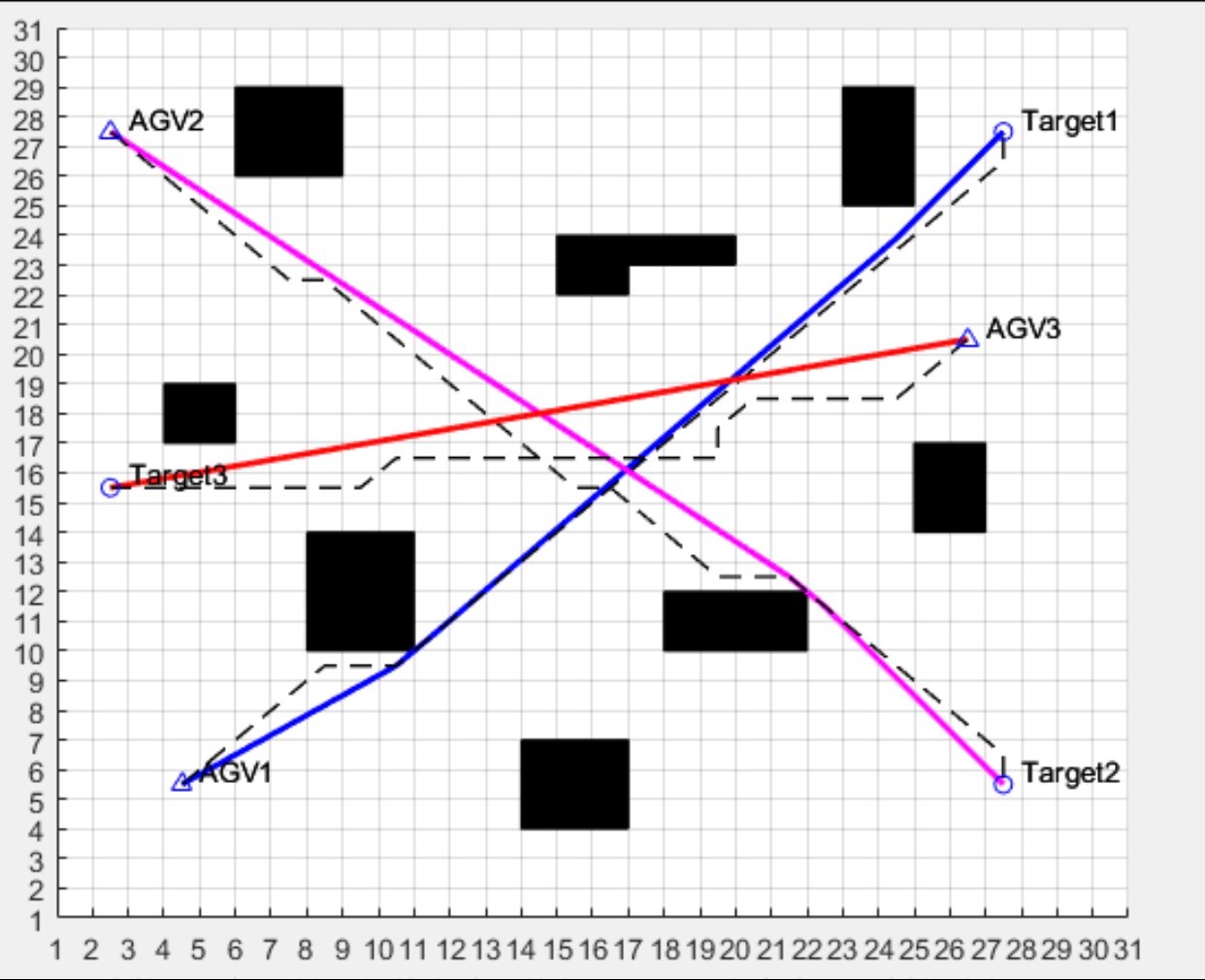
AGV路径规划问题通常涉及多个机器人协作完成特定任务,路径规划算法需要满足实时性、安全性、最优性和动态适应性。传统A*算法虽然能在静态环境中有效规划路径,但对动态环境的适应性不足,容易导致路径阻塞或无法及时调整。蚁群算法虽然在动态环境中表现出更强的适应性,但收敛速度和解的稳定性仍需改进。
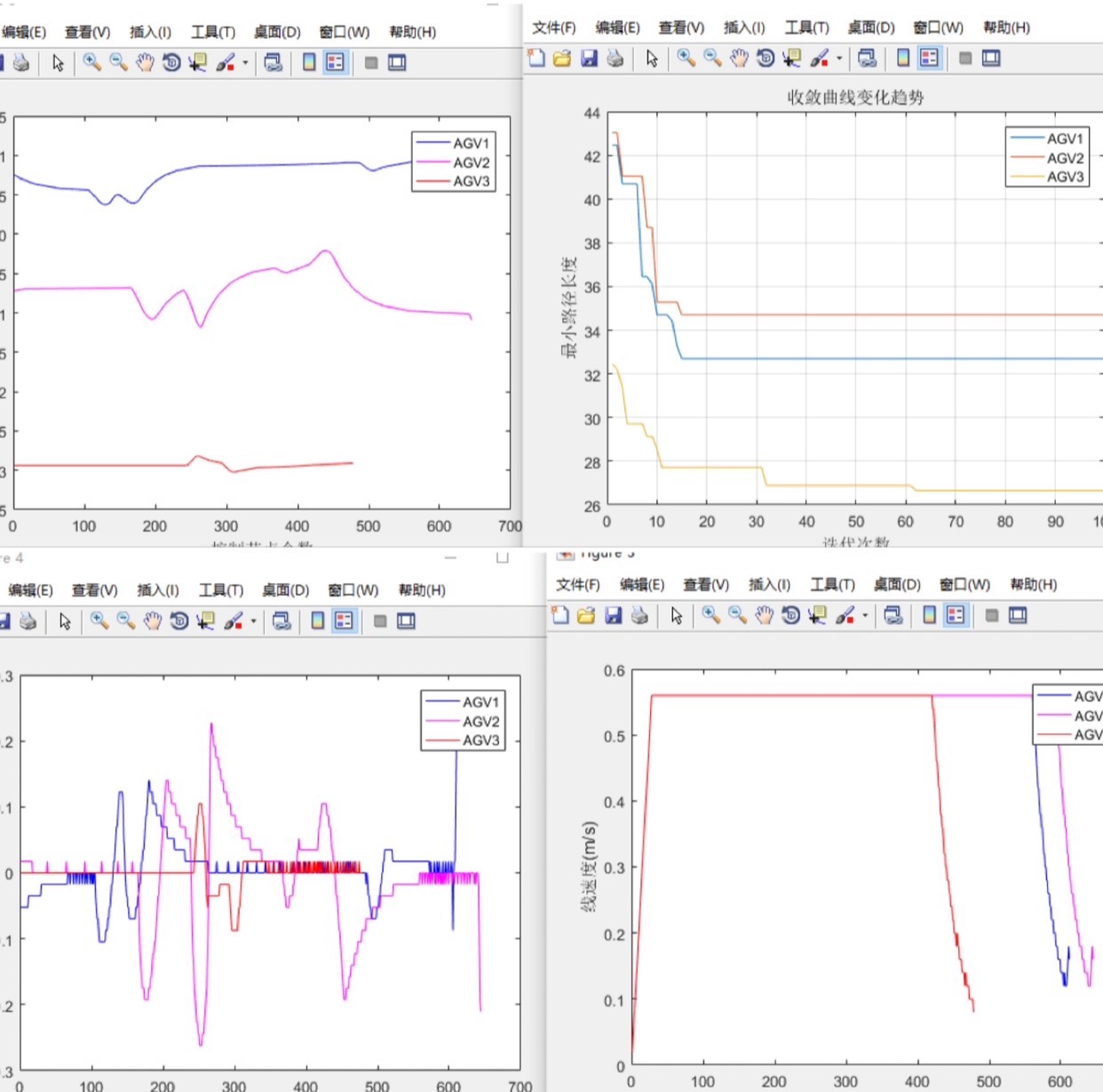
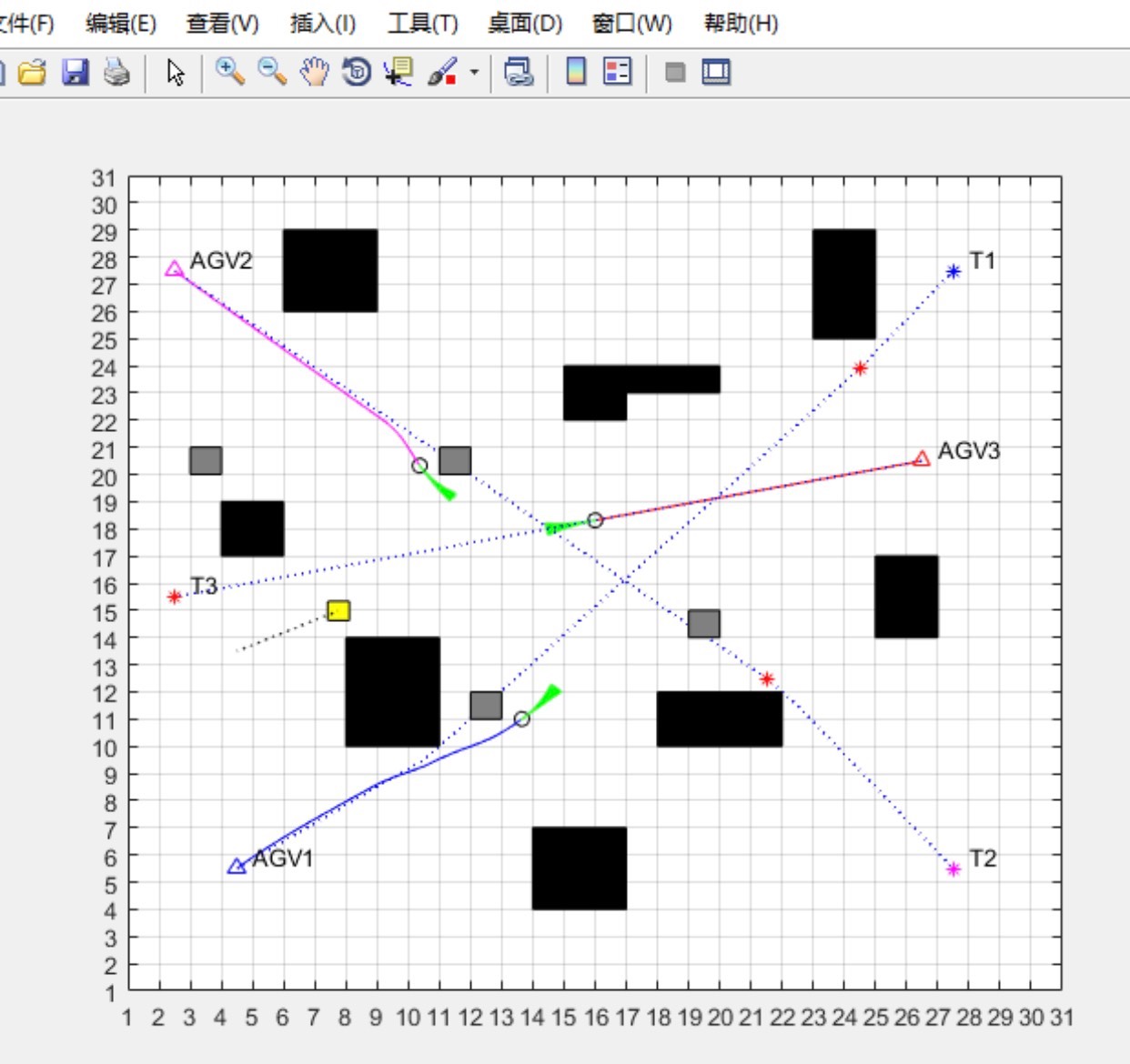
改进A算法通过动态调整障碍物权重和目标函数,能够在动态环境中快速生成安全路径。蚁群算法则通过引入局部搜索机制和信息素更新策略,增强了路径优化能力。将两者结合,既保留了A算法的快速收敛性,又提升了路径质量。
以下是改进A*与蚁群算法结合的AGV路径规划实现代码示例:
python
import numpy as np
import matplotlib.pyplot as plt
class AGV:
def __init__(self, start, goal, grid):
self.start = start
self.goal = goal
self.grid = grid
self.Obstacles = []
self.path = []
self.A = []
self.B = []
self.C = []
self.D = []
self.AStar()
self.AntColony()
def AStar(self):
# A*算法部分
pass
def AntColony(self):
# 蚀菌算法部分
pass
def updateObstacles(self, newObstacles):
# 动态环境中的障碍物更新
pass
def visualizePath(self):
# 可视化路径
pass
def main():
# 初始化环境
grid = np.zeros((20, 20))
start = (5,5)
goal = (15,15)
obstacles = [(3,3), (3,4), (4,3), (4,4), (6,6), (6,7), (7,6), (7,7)]
for obs in obstacles:
grid[obs[0]][obs[1]] = -1
# 初始化AGV
agv = AGV(start, goal, grid)
# 更新障碍物
new_obstacles = [(10,10), (10,11), (11,10), (11,11)]
agv.updateObstacles(new_obstacles)
# 规划路径
path = agv.planning()
# 可视化
agv.visualizePath(path)
plt.show()
if __name__ == '__main__':
main()代码中,AGV类包含了A*算法和蚁群算法的实现框架,具体实现需在空格中补充。通过动态更新障碍物,可以模拟实际AGV在动态环境中的协作路径规划过程。
通过结合改进A*和蚁群算法,AGV路径规划系统在动态环境下表现出更强的实时性和安全性。同时,路径规划算法的优化方向包括:动态障碍物检测、实时路径调整、多AGV协作通信优化等。