

重要信息
**时间:**2025年12月19-21日
**地点:**广东·湛江·岭南师范学院(寸金校区)

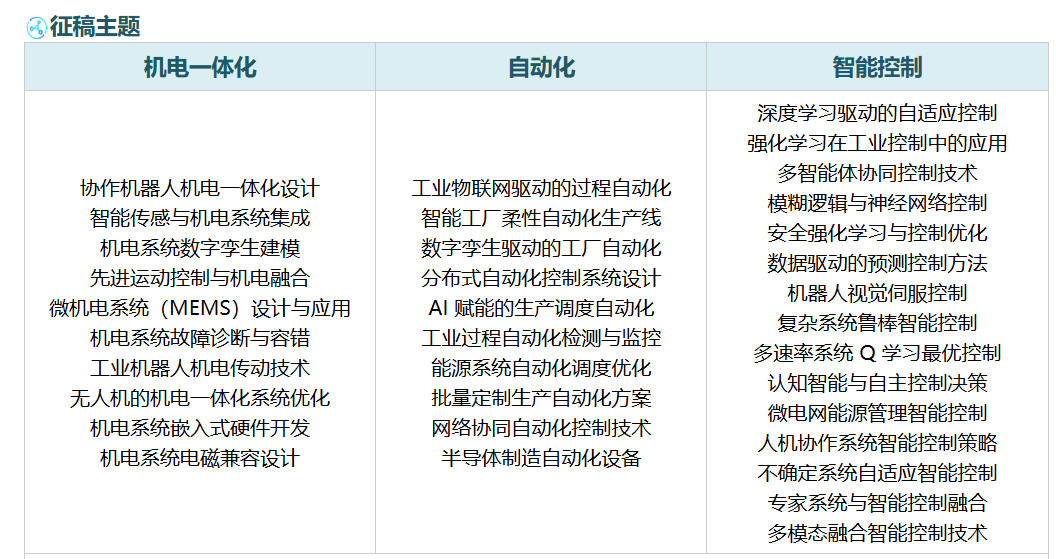
征稿主题
一、机电一体化的核心技术体系
1.1 机电一体化系统的架构组成
机电一体化系统融合机械、电子、控制等多学科技术,其核心架构可划分为以下模块:
| 系统模块 | 核心技术 | 典型组件 |
|---|---|---|
| 机械本体 | 精密机械设计、机构优化 | 伺服电机、传动机构、执行部件 |
| 传感检测 | 多传感器融合、信号处理 | 编码器、力传感器、视觉传感器 |
| 控制单元 | 嵌入式系统、PLC/DCS | 单片机、FPGA、工业控制器 |
| 驱动系统 | 伺服驱动、变频控制 | 伺服驱动器、步进电机驱动器 |
1.2 机电一体化的关键技术特征
机电一体化系统具备集成化 、智能化 、柔性化等特征,其中:
- 集成化体现为机械结构与电控系统的深度融合
- 智能化依赖传感器感知与智能算法决策
- 柔性化通过模块化设计实现多任务适配
二、自动化控制技术的实践应用
2.1 PID 控制算法的实现与优化
PID 控制是工业自动化的核心算法,以下是基于 Python 的 PID 控制器实现示例:
python
运行
class PIDController:
def __init__(self, kp, ki, kd, setpoint=0):
self.kp = kp # 比例系数
self.ki = ki # 积分系数
self.kd = kd # 微分系数
self.setpoint = setpoint # 目标值
self.error_sum = 0 # 误差积分
self.last_error = 0 # 上一次误差
def compute(self, process_value, dt):
# 计算当前误差
error = self.setpoint - process_value
# 比例项
p_term = self.kp * error
# 积分项
self.error_sum += error * dt
i_term = self.ki * self.error_sum
# 微分项
d_term = self.kd * (error - self.last_error) / dt
self.last_error = error
# 计算输出
output = p_term + i_term + d_term
return output
# PID控制示例(控制温度)
pid = PIDController(kp=2.0, ki=0.5, kd=0.1, setpoint=50.0)
current_temp = 25.0 # 初始温度
dt = 0.1 # 采样时间
for _ in range(100):
control_signal = pid.compute(current_temp, dt)
current_temp += control_signal * 0.5 # 温度响应
print(f"当前温度:{current_temp:.2f}°C,控制输出:{control_signal:.2f}")2.2 运动控制系统的轨迹规划
运动控制中的轨迹规划直接影响系统精度与稳定性,以下是关节空间轨迹规划示例:
python
运行
import numpy as np
def cubic_trajectory(start, end, t_total, t):
"""
三次多项式轨迹规划
:param start: 起始位置
:param end: 终止位置
:param t_total: 总运动时间
:param t: 当前时间
:return: 当前位置、速度
"""
# 三次多项式系数计算
a0 = start
a1 = 0
a2 = 3 * (end - start) / (t_total ** 2)
a3 = -2 * (end - start) / (t_total ** 3)
# 位置与速度计算
position = a0 + a1 * t + a2 * t**2 + a3 * t**3
velocity = a1 + 2 * a2 * t + 3 * a3 * t**2
return position, velocity
# 轨迹生成示例(关节从0°到90°运动)
t_total = 2.0 # 总运动时间2秒
time_points = np.linspace(0, t_total, 100)
trajectory = []
for t in time_points:
pos, vel = cubic_trajectory(0, 90, t_total, t)
trajectory.append((t, pos, vel))
# 输出轨迹关键点
for i in range(0, 100, 20):
t, pos, vel = trajectory[i]
print(f"时间:{t:.2f}s,位置:{pos:.2f}°,速度:{vel:.2f}°/s")三、智能控制技术的创新发展
3.1 模糊控制在非线性系统中的应用
模糊控制适用于难以建立精确数学模型的非线性系统,以下是液位模糊控制示例:
python
运行
class FuzzyController:
def __init__(self):
# 定义模糊集合(误差:负大、负小、零、正小、正大)
self.error_mf = {
'NB': lambda x: max(0, (x + 6) / 2) if x < -4 else (max(0, (-x - 2) / 2) if x < -2 else 0),
'NS': lambda x: max(0, (x + 4) / 2) if x < -2 else (max(0, (-x) / 2) if x < 0 else 0),
'Z': lambda x: max(0, (x + 2) / 2) if x < 0 else (max(0, (2 - x) / 2) if x < 2 else 0),
'PS': lambda x: max(0, x / 2) if x < 2 else (max(0, (4 - x) / 2) if x < 4 else 0),
'PB': lambda x: max(0, (x - 2) / 2) if x < 4 else (max(0, (x - 4) / 2) if x < 6 else 0)
}
# 控制规则表
self.rules = {
'NB': 'PB', 'NS': 'PS', 'Z': 'Z', 'PS': 'NS', 'PB': 'NB'
}
def infer(self, error):
# 计算误差隶属度
mf_values = {key: func(error) for key, func in self.error_mf.items()}
# 非零隶属度的规则
active_rules = {k: v for k, v in mf_values.items() if v > 0}
# 加权平均解模糊
output = 0
total_weight = 0
for error_level, weight in active_rules.items():
control_level = self.rules[error_level]
# 控制量量化(PB=3, PS=1, Z=0, NS=-1, NB=-3)
control_value = {'PB':3, 'PS':1, 'Z':0, 'NS':-1, 'NB':-3}[control_level]
output += control_value * weight
total_weight += weight
return output / total_weight if total_weight > 0 else 0
# 模糊控制示例(水箱液位控制)
fuzzy_ctrl = FuzzyController()
current_level = 0 # 初始液位
set_level = 5 # 目标液位
for _ in range(50):
error = set_level - current_level
control = fuzzy_ctrl.infer(error)
current_level += control * 0.3 # 液位响应
print(f"液位误差:{error:.2f},控制输出:{control:.2f},当前液位:{current_level:.2f}")3.2 强化学习在自适应控制中的应用
强化学习通过与环境交互实现控制策略优化,以下是倒立摆控制示例:
python
运行
import numpy as np
class QLearningController:
def __init__(self, state_bins, action_count, alpha=0.1, gamma=0.9, epsilon=0.1):
self.state_bins = state_bins # 状态离散化区间
self.action_count = action_count # 动作数量
self.q_table = np.zeros(state_bins + (action_count,)) # Q表初始化
self.alpha = alpha # 学习率
self.gamma = gamma # 折扣因子
self.epsilon = epsilon # 探索率
def discretize_state(self, state):
# 状态离散化(角度、角速度)
angle_bin = np.digitize(state[0], bins=np.linspace(-np.pi, np.pi, self.state_bins[0]-1))
vel_bin = np.digitize(state[1], bins=np.linspace(-8, 8, self.state_bins[1]-1))
return (angle_bin, vel_bin)
def choose_action(self, state):
# ε-贪心策略选择动作
if np.random.uniform(0, 1) < self.epsilon:
return np.random.choice(self.action_count)
else:
return np.argmax(self.q_table[self.discretize_state(state)])
def learn(self, state, action, reward, next_state, done):
# Q值更新
state_idx = self.discretize_state(state)
next_state_idx = self.discretize_state(next_state)
old_value = self.q_table[state_idx + (action,)]
next_max = np.max(self.q_table[next_state_idx]) if not done else 0
new_value = old_value + self.alpha * (reward + self.gamma * next_max - old_value)
self.q_table[state_idx + (action,)] = new_value
# 简化倒立摆环境
def pendulum_step(state, action):
angle, angle_vel = state
# 动作:-1(左推)、0(不动)、1(右推)
torque = (action - 1) * 0.5
angle_vel += (3 * np.cos(angle) + torque) * 0.05
angle += angle_vel * 0.05
angle_vel *= 0.99 # 阻尼
# 奖励计算(角度接近0奖励高)
reward = np.cos(angle)
done = abs(angle) > np.pi/2
return (angle, angle_vel), reward, done
# 训练过程
q_ctrl = QLearningController(state_bins=(10, 10), action_count=3)
episodes = 1000
for episode in range(episodes):
state = (np.random.uniform(-np.pi/4, np.pi/4), 0)
total_reward = 0
for _ in range(200):
action = q_ctrl.choose_action(state)
next_state, reward, done = pendulum_step(state, action)
q_ctrl.learn(state, action, reward, next_state, done)
state = next_state
total_reward += reward
if done:
break
if episode % 100 == 0:
print(f"Episode {episode}: 总奖励 = {total_reward:.2f}")四、机电一体化系统的集成与优化
4.1 嵌入式控制系统的设计
嵌入式系统是机电一体化的核心控制单元,其设计流程包括:
- 需求分析:确定控制功能、性能指标、接口需求
- 硬件选型:MCU/MPU、传感器、通信模块选型
- 软件设计:实时操作系统(RTOS)移植、驱动开发
- 系统调试:硬件测试、软件仿真、联合调试
4.2 多传感器融合技术
多传感器融合提升系统感知精度与可靠性,常见融合算法对比:
| 融合算法 | 原理 | 优势 | 适用场景 |
|---|---|---|---|
| 卡尔曼滤波 | 状态估计与误差协方差更新 | 实时性好、精度高 | 线性系统 |
| 粒子滤波 | 蒙特卡洛采样与权重更新 | 适用于非线性系统 | 复杂环境感知 |
| D-S 证据理论 | 证据组合与信任函数 | 处理不确定性信息 | 多源异构数据融合 |
五、国际交流与合作机会
作为国际学术会议,将吸引全球范围内的专家学者参与。无论是发表研究成果、聆听特邀报告,还是在圆桌论坛中与行业大咖交流,都能拓宽国际视野,甚至找到潜在的合作伙伴。对于高校师生来说,这也是展示研究、积累学术人脉的好机会。
