本节补充高级优化策略、故障排查、前沿技术应用,并提供完整的工业级项目示例,帮助你从 "会用" 到 "用好" PyTorch。
一:高级优化策略
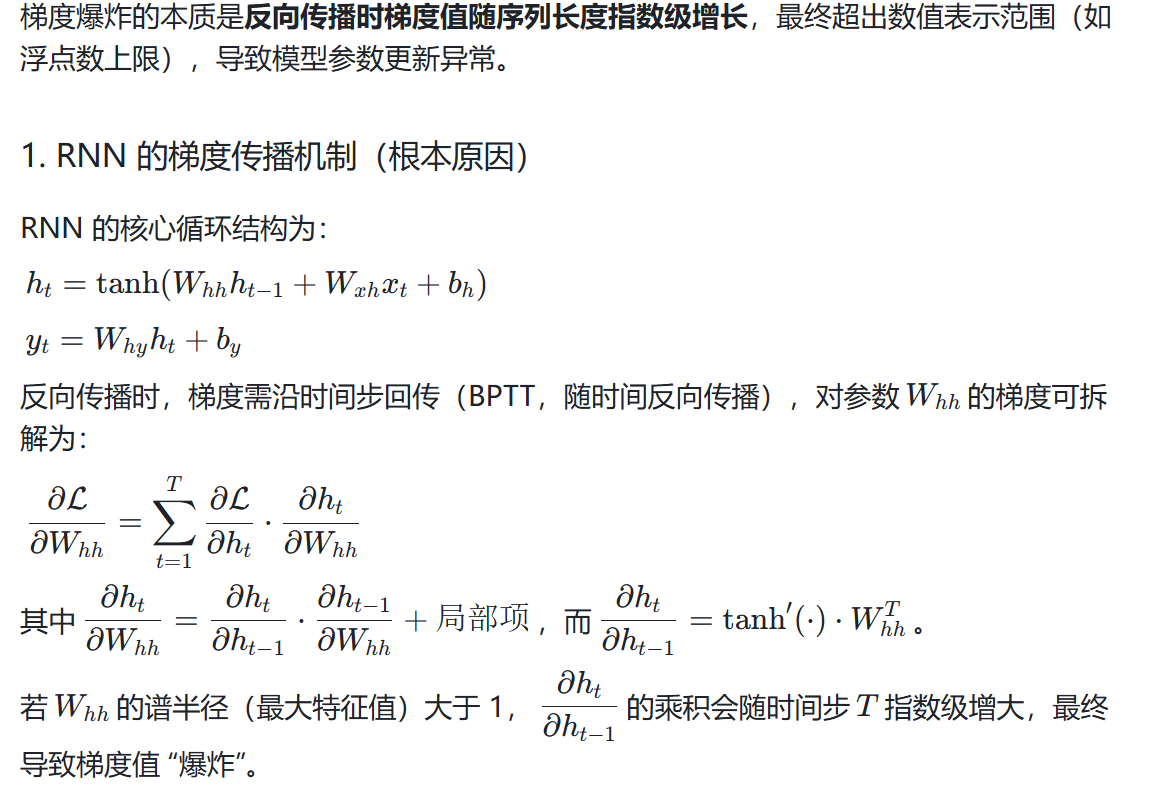
1.1 梯度裁剪(解决梯度爆炸)
在 RNN/LSTM 等序列模型中,梯度爆炸是常见问题,出现的原因:
- 初始化不当:参数初始值过大,直接放大梯度传播的基数;
- 激活函数选择:如 ReLU 在正区间梯度恒为 1,若叠加权重放大,易加剧爆炸;
- 序列过长:时间步T越大,梯度累积的指数效应越明显;
- 数据未归一化:输入 / 隐藏层数值范围过大,梯度计算时基数偏高。
梯度裁剪是最直接的解决方案,配合参数初始化、层归一化、合理的激活函数可大幅降低风险。梯度裁剪可限制梯度的最大范数:
# 训练循环中添加梯度裁剪
loss.backward()
# 裁剪梯度,max_norm为最大范数阈值
torch.nn.utils.clip_grad_norm_(net.parameters(), max_norm=1.0)
optimizer.step()1.2 早停(Early Stopping)
避免过拟合,当验证集损失不再下降时停止训练:
import numpy as np
# 初始化早停参数
patience = 5 # 连续5个epoch无提升则停止
best_val_loss = np.inf
early_stop_count = 0
for epoch in range(100):
train(epoch)
val_loss = test()
# 保存最优模型
if val_loss < best_val_loss:
best_val_loss = val_loss
torch.save(net.state_dict(), "best_model.pth")
early_stop_count = 0
else:
early_stop_count += 1
# 早停判断
if early_stop_count >= patience:
print(f"早停触发,最优验证损失:{best_val_loss:.4f}")
break1.3 混合数据增强(Albumentations)
比 torchvision 更强大的数据增强库,支持多类型变换且速度更快(适用于 CV 任务):
import albumentations as A
from albumentations.pytorch import ToTensorV2
import cv2
# 定义增强策略
train_transform = A.Compose([
A.RandomResizedCrop(28, 28, scale=(0.8, 1.0)), # 随机裁剪缩放
A.HorizontalFlip(p=0.5), # 水平翻转
A.RandomRotation(degrees=10), # 随机旋转
A.Normalize(mean=(0.1307,), std=(0.3081,)), # 归一化
ToTensorV2() # 转为张量
])
# 自定义数据集适配Albumentations
class MNISTAlbumentationsDataset(Dataset):
def __init__(self, dataset, transform=None):
self.dataset = dataset
self.transform = transform
def __len__(self):
return len(self.dataset)
def __getitem__(self, idx):
img, label = self.dataset[idx]
img = np.array(img).astype(np.uint8).squeeze() # 转为numpy数组
if self.transform:
augmented = self.transform(image=img)
img = augmented["image"]
return img, label
# 加载数据
train_dataset = datasets.MNIST(root='./data', train=True, download=True)
train_aug_dataset = MNISTAlbumentationsDataset(train_dataset, train_transform)
train_loader = DataLoader(train_aug_dataset, batch_size=64, shuffle=True)二:常见故障排查与调优
2.1 显存不足问题
| 问题原因 | 解决方案 |
|---|---|
| 批次尺寸过大 | 减小 batch_size,使用梯度累积(模拟大批次) |
| 模型参数过多 | 使用模型量化、剪枝,或改用轻量级模型 |
| 未禁用梯度计算(评估 / 推理) | 推理时加with torch.no_grad() |
| 数据加载占用显存 | num_workers适当增大,pin_memory=True |
| 中间变量未释放 | 手动删除无用变量(del var),调用torch.cuda.empty_cache() |
梯度累积示例(模拟大批次)
accumulation_steps = 4 # 累积4个小批次,等价于batch_size*4
optimizer.zero_grad()
for batch_idx, (data, target) in enumerate(train_loader):
data, target = data.to(device), target.to(device)
output = net(data)
loss = criterion(output, target)
loss = loss / accumulation_steps # 损失归一化
# 累积梯度
loss.backward()
# 每accumulation_steps步更新一次参数
if (batch_idx + 1) % accumulation_steps == 0:
optimizer.step()
optimizer.zero_grad()2.2 模型过拟合问题
| 解决方案 | 代码示例 |
|---|---|
| 数据增强 | 见 1.3 节 Albumentations 示例 |
| Dropout 层 | nn.Dropout(0.5)/nn.Dropout2d(0.2) |
| 权重衰减(L2) | optimizer = optim.Adam(net.parameters(), lr=0.001, weight_decay=1e-4) |
| 早停 | 见 1.2 节早停示例 |
| 批量归一化(BatchNorm) | nn.BatchNorm2d(16)(CNN)/nn.BatchNorm1d(256)(全连接) |
| 模型剪枝 | 见下方示例 |
模型剪枝(减少参数数量)
import torch.nn.utils.prune as prune
# 对卷积层进行剪枝(移除50%的权重)
conv1 = net.conv1
prune.l1_unstructured(conv1, name="weight", amount=0.5) # L1范数剪枝
prune.remove(conv1, "weight") # 永久移除剪枝参数
# 对全连接层剪枝
fc1 = net.fc1
prune.random_unstructured(fc1, name="weight", amount=0.3) # 随机剪枝
prune.remove(fc1, "weight")
# 验证剪枝后模型精度
test(net)2.3 训练速度慢问题
| 优化方向 | 具体措施 |
|---|---|
| 硬件层面 | 使用 GPU / 多 GPU(DDP)、开启 CUDA_LAUNCH_BLOCKING=0 |
| 数据加载 | num_workers>0、pin_memory=True、数据预加载到内存 |
| 混合精度 | 使用 AMP(见 3.2 节) |
| 编译优化 | 使用torch.compile(net)(PyTorch 2.0+) |
| 优化器选择 | 优先使用 AdamW/SGD + 动量,避免低效优化器 |
PyTorch 2.0+ 编译优化(提速 30%-100%)
# 直接编译模型,自动优化计算图
net = torch.compile(net, mode="max-autotune") # max-autotune:最优性能,首次编译稍慢
# 训练逻辑不变
for epoch in range(5):
train(epoch)
test()三:前沿技术应用(PyTorch 2.x+)
3.1 LoRA 微调(低秩适配,大模型轻量化微调)
适用于大语言模型(LLM)、视觉大模型(如 ViT)的轻量化微调,仅训练低秩矩阵:
from peft import LoraConfig, get_peft_model, LoraModel
# 定义LoRA配置
lora_config = LoraConfig(
r=8, # 低秩矩阵的秩
lora_alpha=32, # 缩放因子
target_modules=["conv1", "fc1"], # 目标微调层
lora_dropout=0.1,
bias="none",
task_type="CLASSIFICATION"
)
# 包装模型为LoRA模型
net = get_peft_model(net, lora_config)
net.print_trainable_parameters() # 输出可训练参数占比(通常<1%)
# 训练逻辑不变(仅训练LoRA参数)
optimizer = optim.Adam(net.parameters(), lr=0.001)
for epoch in range(5):
train(epoch)
test()
# 保存/加载LoRA权重
net.save_pretrained("lora_model")
net = LoraModel.from_pretrained(net, "lora_model")3.2 扩散模型(Diffusion Model)极简实现
基于 PyTorch 实现简单的扩散模型(图像生成):
import torch
import torch.nn as nn
import torch.optim as optim
from torch.utils.data import DataLoader
from torchvision import datasets, transforms
import matplotlib.pyplot as plt
# 1. 扩散过程定义(前向加噪)
def forward_diffusion(x, t, betas):
"""
x: 原始图像
t: 时间步
betas: 噪声系数
"""
alpha = 1 - betas
alpha_bar = torch.cumprod(alpha, dim=0)
alpha_bar_t = alpha_bar[t].reshape(-1, 1, 1, 1)
# 加噪:x_t = sqrt(alpha_bar_t)*x + sqrt(1-alpha_bar_t)*噪声
noise = torch.randn_like(x)
x_t = torch.sqrt(alpha_bar_t) * x + torch.sqrt(1 - alpha_bar_t) * noise
return x_t, noise
# 2. 简单UNet模型(去噪网络)
class SimpleUNet(nn.Module):
def __init__(self):
super().__init__()
self.down = nn.Sequential(
nn.Conv2d(1, 64, 3, 1, 1),
nn.ReLU(),
nn.MaxPool2d(2),
nn.Conv2d(64, 128, 3, 1, 1),
nn.ReLU(),
nn.MaxPool2d(2)
)
self.up = nn.Sequential(
nn.Upsample(scale_factor=2),
nn.Conv2d(128, 64, 3, 1, 1),
nn.ReLU(),
nn.Upsample(scale_factor=2),
nn.Conv2d(64, 1, 3, 1, 1)
)
self.time_emb = nn.Embedding(1000, 128) # 时间步嵌入
def forward(self, x, t):
# 时间步嵌入
t_emb = self.time_emb(t).reshape(-1, 128, 1, 1)
# 下采样
x = self.down(x)
# 融合时间步信息
x = x + t_emb
# 上采样
x = self.up(x)
return x
# 3. 训练扩散模型
# 数据加载
transform = transforms.Compose([transforms.ToTensor(), transforms.Normalize((0.5,), (0.5,))])
train_dataset = datasets.MNIST(root='./data', train=True, download=True, transform=transform)
train_loader = DataLoader(train_dataset, batch_size=64, shuffle=True)
# 初始化参数
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
betas = torch.linspace(1e-4, 0.02, 1000).to(device) # 1000个时间步
net = SimpleUNet().to(device)
criterion = nn.MSELoss()
optimizer = optim.Adam(net.parameters(), lr=0.001)
# 训练循环
epochs = 5
for epoch in range(epochs):
net.train()
total_loss = 0.0
for x, _ in train_loader:
x = x.to(device)
# 随机采样时间步
t = torch.randint(0, 1000, (x.shape[0],)).to(device)
# 前向加噪
x_t, noise = forward_diffusion(x, t, betas)
# 预测噪声
pred_noise = net(x_t, t)
# 损失:预测噪声与真实噪声的MSE
loss = criterion(pred_noise, noise)
optimizer.zero_grad()
loss.backward()
optimizer.step()
total_loss += loss.item()
print(f"Epoch {epoch+1}, Loss: {total_loss/len(train_loader):.4f}")
# 4. 反向扩散(图像生成)
def reverse_diffusion(net, betas, steps=1000):
"""反向扩散生成图像"""
alpha = 1 - betas
alpha_bar = torch.cumprod(alpha, dim=0)
# 初始噪声
x = torch.randn(1, 1, 28, 28).to(device)
net.eval()
with torch.no_grad():
for t in reversed(range(steps)):
t_tensor = torch.tensor([t]).to(device)
# 预测噪声
pred_noise = net(x, t_tensor)
# 反向去噪
alpha_t = alpha[t]
alpha_bar_t = alpha_bar[t]
if t > 0:
noise = torch.randn_like(x)
else:
noise = torch.zeros_like(x)
x = (1/torch.sqrt(alpha_t)) * (x - (1-alpha_t)/torch.sqrt(1-alpha_bar_t)*pred_noise) + torch.sqrt(1-alpha_t)*noise
return x
# 生成图像
generated_img = reverse_diffusion(net, betas)
plt.imshow(generated_img.squeeze().cpu().numpy(), cmap='gray')
plt.title("Diffusion Model Generated Image")
plt.show()四:工业级项目完整示例(图像分类)
以下是一个可直接落地的图像分类项目,包含配置管理、日志、监控、部署全流程:
项目结构
plaintext
image_classification/
├── config/
│ └── train.yaml # 配置文件
├── data/
│ ├── train/ # 训练集(按类别分文件夹)
│ └── val/ # 验证集
├── logs/
│ ├── tensorboard/ # TensorBoard日志
│ └── train.log # 文本日志
├── models/
│ └── resnet.py # 模型定义
├── scripts/
│ ├── train.py # 训练脚本
│ ├── test.py # 测试脚本
│ └── deploy.py # 部署脚本
├── utils/
│ ├── config.py # 配置解析
│ ├── logger.py # 日志工具
│ └── metrics.py # 评估指标
└── requirements.txt核心文件示例
1. config/train.yaml
model:
name: "resnet18"
num_classes: 10
pretrained: true
train:
batch_size: 32
epochs: 20
lr: 0.001
weight_decay: 1e-4
patience: 5
device: "cuda"
data:
train_path: "./data/train"
val_path: "./data/val"
img_size: 224
log:
tensorboard_path: "./logs/tensorboard"
log_file: "./logs/train.log"2. utils/config.py
import yaml
def load_config(config_path):
with open(config_path, 'r', encoding='utf-8') as f:
config = yaml.safe_load(f)
return config3. utils/logger.py
import logging
from torch.utils.tensorboard import SummaryWriter
def setup_logger(log_file):
logging.basicConfig(
level=logging.INFO,
format='%(asctime)s - %(levelname)s - %(message)s',
handlers=[
logging.FileHandler(log_file),
logging.StreamHandler()
]
)
return logging.getLogger(__name__)
def setup_tensorboard(log_path):
return SummaryWriter(log_path)4. scripts/train.py
import os
import torch
import torch.nn as nn
import torch.optim as optim
from torchvision import datasets, transforms, models
from torch.utils.data import DataLoader
from utils.config import load_config
from utils.logger import setup_logger, setup_tensorboard
from utils.metrics import calculate_accuracy
# 加载配置
config = load_config("./config/train.yaml")
# 初始化日志
logger = setup_logger(config["log"]["log_file"])
tb_writer = setup_tensorboard(config["log"]["tensorboard_path"])
# 设备配置
device = torch.device(config["train"]["device"] if torch.cuda.is_available() else "cpu")
logger.info(f"使用设备:{device}")
# 数据加载
train_transform = transforms.Compose([
transforms.Resize((config["data"]["img_size"], config["data"]["img_size"])),
transforms.RandomHorizontalFlip(),
transforms.RandomRotation(10),
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
])
val_transform = transforms.Compose([
transforms.Resize((config["data"]["img_size"], config["data"]["img_size"])),
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
])
train_dataset = datasets.ImageFolder(config["data"]["train_path"], transform=train_transform)
val_dataset = datasets.ImageFolder(config["data"]["val_path"], transform=val_transform)
train_loader = DataLoader(train_dataset, batch_size=config["train"]["batch_size"], shuffle=True, num_workers=4)
val_loader = DataLoader(val_dataset, batch_size=config["train"]["batch_size"], shuffle=False, num_workers=4)
# 模型初始化
if config["model"]["name"] == "resnet18":
model = models.resnet18(pretrained=config["model"]["pretrained"])
model.fc = nn.Linear(model.fc.in_features, config["model"]["num_classes"])
model = model.to(device)
# 优化器与损失函数
criterion = nn.CrossEntropyLoss()
optimizer = optim.AdamW(model.parameters(), lr=config["train"]["lr"], weight_decay=config["train"]["weight_decay"])
scheduler = optim.lr_scheduler.ReduceLROnPlateau(optimizer, mode='max', factor=0.1, patience=3)
# 早停初始化
best_acc = 0.0
early_stop_count = 0
# 训练循环
for epoch in range(config["train"]["epochs"]):
# 训练阶段
model.train()
train_loss = 0.0
train_acc = 0.0
for imgs, labels in train_loader:
imgs, labels = imgs.to(device), labels.to(device)
optimizer.zero_grad()
outputs = model(imgs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
train_loss += loss.item() * imgs.size(0)
train_acc += calculate_accuracy(outputs, labels) * imgs.size(0)
train_loss /= len(train_loader.dataset)
train_acc /= len(train_loader.dataset)
# 验证阶段
model.eval()
val_loss = 0.0
val_acc = 0.0
with torch.no_grad():
for imgs, labels in val_loader:
imgs, labels = imgs.to(device), labels.to(device)
outputs = model(imgs)
loss = criterion(outputs, labels)
val_loss += loss.item() * imgs.size(0)
val_acc += calculate_accuracy(outputs, labels) * imgs.size(0)
val_loss /= len(val_loader.dataset)
val_acc /= len(val_loader.dataset)
# 学习率调度
scheduler.step(val_acc)
# 日志记录
logger.info(f"Epoch [{epoch+1}/{config['train']['epochs']}]")
logger.info(f"Train Loss: {train_loss:.4f}, Train Acc: {train_acc:.4f}")
logger.info(f"Val Loss: {val_loss:.4f}, Val Acc: {val_acc:.4f}")
tb_writer.add_scalar("Loss/Train", train_loss, epoch)
tb_writer.add_scalar("Loss/Val", val_loss, epoch)
tb_writer.add_scalar("Accuracy/Train", train_acc, epoch)
tb_writer.add_scalar("Accuracy/Val", val_acc, epoch)
tb_writer.add_scalar("LR", optimizer.param_groups[0]['lr'], epoch)
# 早停与模型保存
if val_acc > best_acc:
best_acc = val_acc
torch.save({
'epoch': epoch,
'model_state_dict': model.state_dict(),
'optimizer_state_dict': optimizer.state_dict(),
'best_acc': best_acc
}, "best_model.pth")
logger.info(f"保存最优模型,验证精度:{best_acc:.4f}")
early_stop_count = 0
else:
early_stop_count += 1
if early_stop_count >= config["train"]["patience"]:
logger.info(f"早停触发,最优验证精度:{best_acc:.4f}")
break
# 关闭日志
tb_writer.close()
logger.info("训练完成")学习与进阶建议
1. 循序渐进的练习路径
- 基础巩固:复现经典模型(ResNet、LSTM、Transformer),理解每一层的作用。
- 小项目实战 :
- CV:MNIST/CIFAR-10 分类、猫狗识别、目标检测(YOLO+PyTorch)。
- NLP:文本分类、情感分析、文本生成(LSTM/GPT 极简版)。
- 大模型微调:基于 HuggingFace Transformers 微调 BERT/ViT,掌握 LoRA/QLoRA。
- 工程化落地:将模型部署到 TorchServe/TensorRT,编写 API 接口。
2. 避坑指南
- 不要忽视数据:数据质量 > 模型复杂度,优先做好数据清洗、标注、增强。
- 不要盲目调参:先固定模型结构,再调学习率 / 批次,最后尝试复杂优化策略。
- 不要忽略工程细节:日志、监控、版本管理(Git)、代码注释是工业级项目的核心。
3. 进阶方向
- 多模态学习:CLIP、BLIP 等多模态模型的 PyTorch 实现。
- 强化学习:结合 PyTorch 实现 DQN/PPO,落地游戏 AI / 机器人控制。
- 量化与部署:深入 TensorRT/ONNX Runtime,优化模型推理速度。
- 分布式训练:掌握 DeepSpeed/FairScale,训练千亿参数大模型。