引言
在数字图像处理领域,灰度变换与空间滤波是图像增强 的核心手段,也是入门数字图像处理的关键知识点。灰度变换通过直接修改像素灰度值实现对比度调整、亮度校正等效果;空间滤波则利用邻域像素的运算实现图像平滑、锐化等增强操作。本章将从基础概念到实战代码,全方位拆解灰度变换与空间滤波的核心知识点,结合可视化对比和可直接运行的 Python 代码,让你彻底吃透这部分内容。
学习目标
- 理解灰度变换与空间滤波的基本原理和应用场景;
- 掌握常用灰度变换函数(反转、对数、伽马、分段线性)的实现与效果;
- 精通直方图处理(均衡化、匹配、局部处理)的算法逻辑和代码实现;
- 掌握空间滤波的核心原理(相关、卷积),能自主构建滤波器核;
- 实现平滑 / 锐化滤波器,并理解低通、高通、带阻 / 带通滤波器的应用;
- 学会组合多种空间增强方法解决实际图像增强问题。
3.1 背景
3.1.1 灰度变换和空间滤波基础
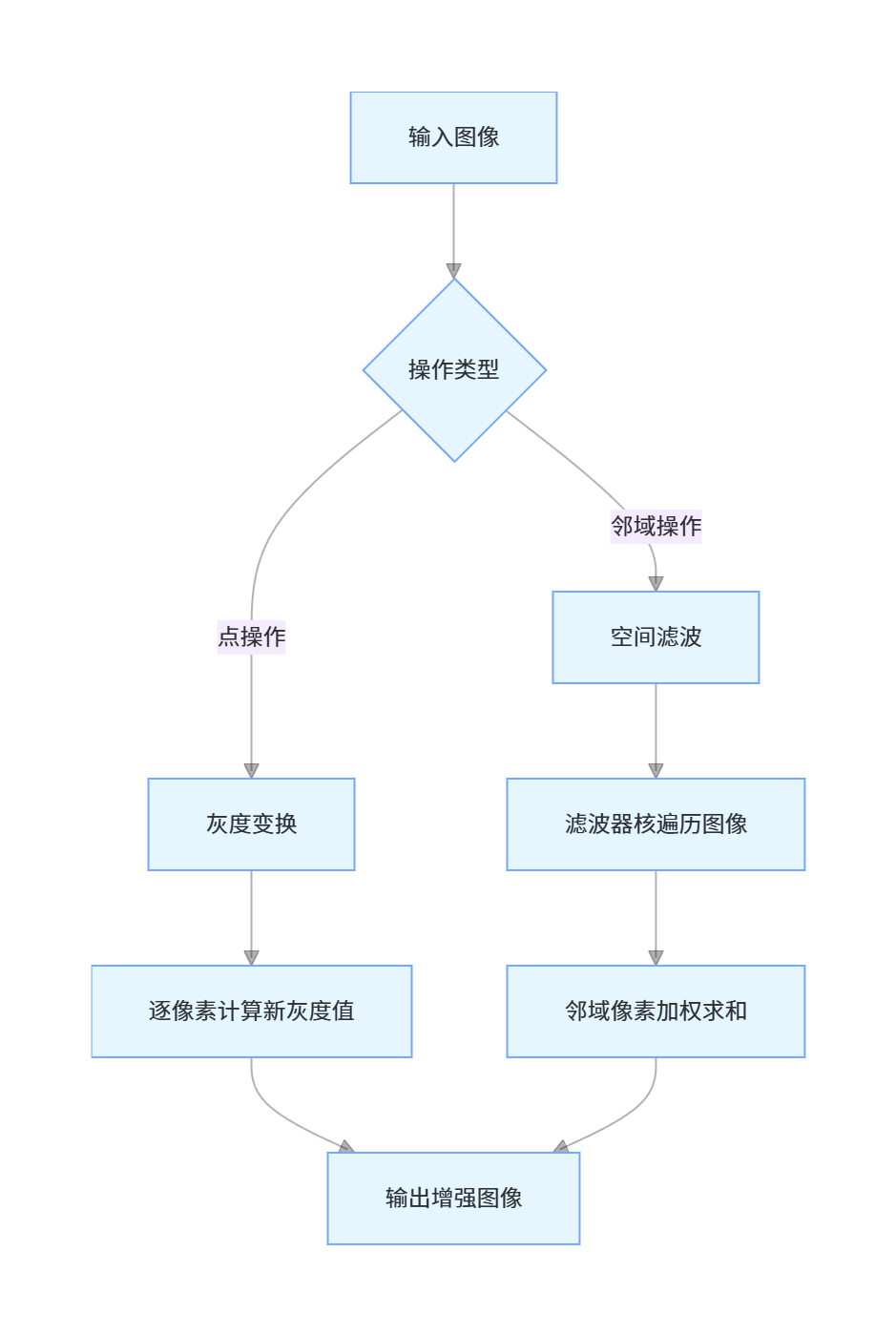
灰度变换是点操作 (Pixel-wise Operation),即每个像素的输出仅由该像素的输入值决定,核心是修改像素的灰度值分布;空间滤波是邻域操作(Neighborhood Operation),即每个像素的输出由该像素及其邻域内的像素共同决定,核心是利用滤波器核(卷积核)对图像进行卷积 / 相关运算。
3.1.2 关于本章中例子的说明
本章所有代码基于 Python 实现,依赖库包括:numpy (数值计算)、cv2 (图像读取 / 处理)、matplotlib (可视化)、skimage(辅助直方图处理)。所有案例使用经典测试图像(如 lena、灰度图),代码可直接运行,运行前需确保安装依赖:
pip install numpy opencv-python matplotlib scikit-image3.2 一些基本的灰度变换函数
核心原理
灰度变换的通用形式为:s = T(r),其中r是原始像素灰度值,s是变换后的灰度值,T是变换函数。
完整代码实现
import numpy as np
import cv2
import matplotlib.pyplot as plt
# 设置matplotlib支持中文显示
plt.rcParams['font.sans-serif'] = ['SimHei'] # 黑体
plt.rcParams['axes.unicode_minus'] = False # 解决负号显示问题
# 读取图像(转为灰度图)
img = cv2.imread('lena.jpg', cv2.IMREAD_GRAYSCALE)
if img is None:
raise ValueError("请确保lena.jpg文件在当前目录下,或替换为其他灰度图像路径")
# ---------------------- 3.2.1 图像反转 ----------------------
# 原理:s = L - 1 - r,L为灰度级(通常256)
def invert_image(img):
return 255 - img
img_invert = invert_image(img)
# ---------------------- 3.2.2 对数变换 ----------------------
# 原理:s = c * log(1 + r),c为归一化系数
def log_transform(img):
# 归一化到[0,1]避免数值溢出
img_normalized = img / 255.0
# 计算对数变换,加1避免log(0)
log_img = np.log1p(img_normalized)
# 归一化回[0,255]
log_img = (log_img / np.max(log_img)) * 255
return log_img.astype(np.uint8)
img_log = log_transform(img)
# ---------------------- 3.2.3 幂律(伽马)变换 ----------------------
# 原理:s = c * r^γ,c为归一化系数
def gamma_transform(img, gamma=1.0):
img_normalized = img / 255.0
gamma_img = np.power(img_normalized, gamma)
gamma_img = (gamma_img / np.max(gamma_img)) * 255
return gamma_img.astype(np.uint8)
# 对比不同gamma值的效果
img_gamma_05 = gamma_transform(img, 0.5) # 增强亮部
img_gamma_2 = gamma_transform(img, 2.0) # 增强暗部
# ---------------------- 3.2.4 分段线性变换(对比度拉伸) ----------------------
# 原理:分段线性函数,拉伸指定灰度区间的对比度
def piecewise_linear(img, r1=50, s1=0, r2=200, s2=255):
# 创建变换映射表
lut = np.zeros(256, dtype=np.uint8)
for r in range(256):
if r < r1:
lut[r] = (s1 / r1) * r if r1 != 0 else 0
elif r > r2:
lut[r] = s2 + ((255 - s2) / (255 - r2)) * (r - r2) if r2 != 255 else 255
else:
lut[r] = s1 + ((s2 - s1) / (r2 - r1)) * (r - r1)
# 应用映射表
return cv2.LUT(img, lut)
img_piecewise = piecewise_linear(img)
# ---------------------- 可视化所有效果 ----------------------
plt.figure(figsize=(16, 12))
# 原始图像
plt.subplot(3, 3, 1)
plt.imshow(img, cmap='gray')
plt.title('原始图像')
plt.axis('off')
# 图像反转
plt.subplot(3, 3, 2)
plt.imshow(img_invert, cmap='gray')
plt.title('图像反转')
plt.axis('off')
# 对数变换
plt.subplot(3, 3, 3)
plt.imshow(img_log, cmap='gray')
plt.title('对数变换')
plt.axis('off')
# 伽马变换(gamma=0.5)
plt.subplot(3, 3, 4)
plt.imshow(img_gamma_05, cmap='gray')
plt.title('伽马变换 (γ=0.5)')
plt.axis('off')
# 伽马变换(gamma=2.0)
plt.subplot(3, 3, 5)
plt.imshow(img_gamma_2, cmap='gray')
plt.title('伽马变换 (γ=2.0)')
plt.axis('off')
# 分段线性变换
plt.subplot(3, 3, 6)
plt.imshow(img_piecewise, cmap='gray')
plt.title('分段线性变换(对比度拉伸)')
plt.axis('off')
# 原始图像直方图
plt.subplot(3, 3, 7)
plt.hist(img.ravel(), bins=256, range=[0,255])
plt.title('原始图像直方图')
plt.xlabel('灰度值')
plt.ylabel('像素数')
# 伽马变换(γ=0.5)直方图
plt.subplot(3, 3, 8)
plt.hist(img_gamma_05.ravel(), bins=256, range=[0,255])
plt.title('伽马变换(γ=0.5)直方图')
plt.xlabel('灰度值')
plt.ylabel('像素数')
# 分段线性变换直方图
plt.subplot(3, 3, 9)
plt.hist(img_piecewise.ravel(), bins=256, range=[0,255])
plt.title('分段线性变换直方图')
plt.xlabel('灰度值')
plt.ylabel('像素数')
plt.tight_layout()
plt.show()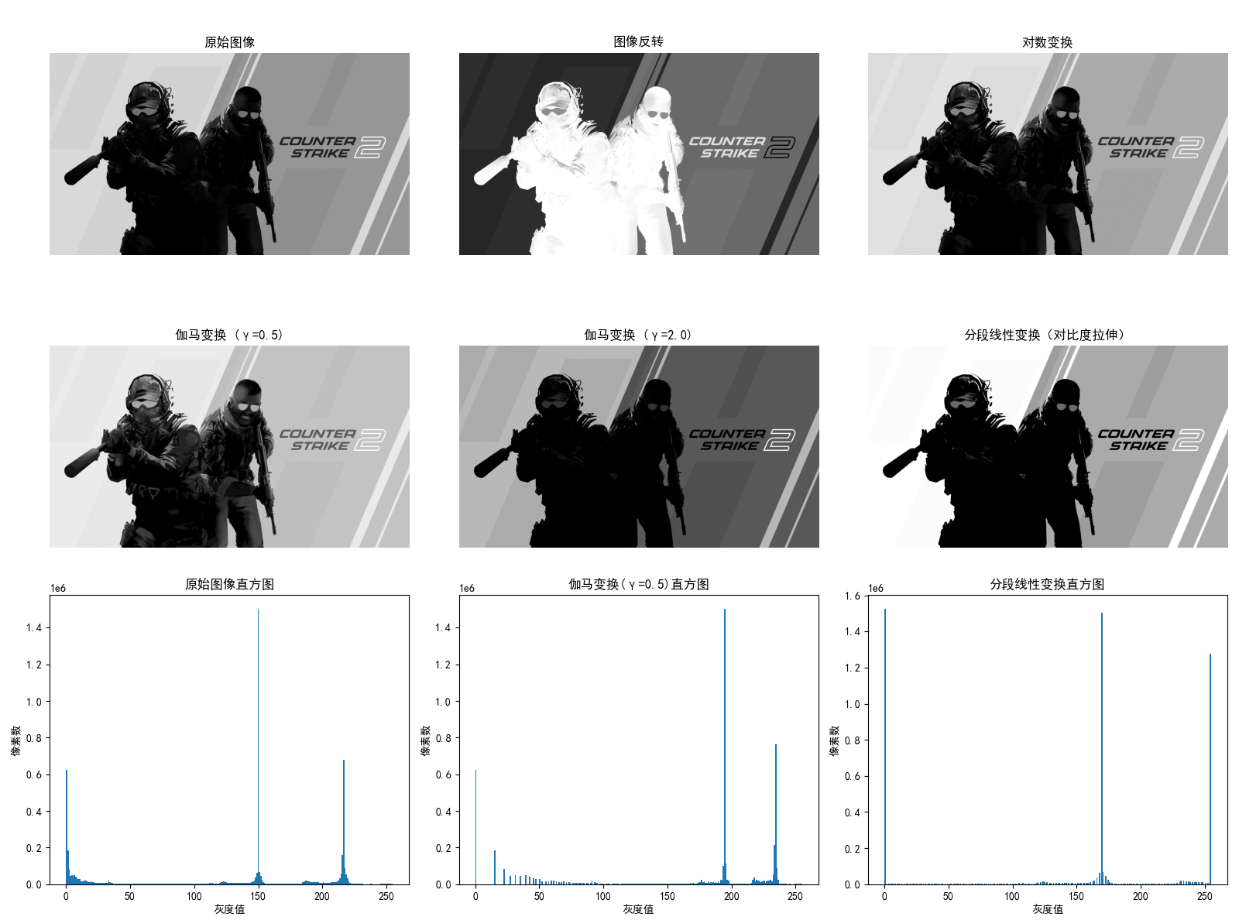
效果说明
- 图像反转:适用于增强暗背景下的亮物体(如医学影像);
- 对数变换:压缩高灰度值区间,扩展低灰度值区间,适合增强图像暗部细节;
- 伽马变换:γ<1 增强亮部,γ>1 增强暗部,是调整图像对比度的常用手段;
- 分段线性变换:可精准拉伸指定灰度区间的对比度,适合修复对比度不足的图像。
3.3 直方图处理
核心原理
图像直方图是灰度值的像素数统计分布,直方图处理通过调整灰度分布实现图像增强。
完整代码实现
import numpy as np
import cv2
import matplotlib.pyplot as plt
from skimage import exposure
# 设置中文显示
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
# 读取低对比度灰度图像(效果更明显)
img = cv2.imread('low_contrast.jpg', cv2.IMREAD_GRAYSCALE)
if img is None:
# 若没有低对比度图像,用lena模拟
img = cv2.imread('lena.jpg', cv2.IMREAD_GRAYSCALE)
# 降低对比度
img = cv2.convertScaleAbs(img, alpha=0.5, beta=50)
# ---------------------- 3.3.1 直方图均衡化 ----------------------
# 全局直方图均衡化
img_eq = cv2.equalizeHist(img)
# 自适应(局部)直方图均衡化(3.3.3)
clahe = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8,8))
img_clahe = clahe.apply(img)
# ---------------------- 3.3.2 直方图匹配(规定化) ----------------------
# 生成目标直方图(这里用正态分布模拟)
target_hist = np.zeros(256)
mu, sigma = 128, 32
for i in range(256):
target_hist[i] = np.exp(-((i - mu)**2) / (2 * sigma**2))
target_hist = target_hist / target_hist.sum() * img.size # 归一化到像素数
# 用skimage实现直方图匹配
img_matched = exposure.match_histograms(img, img_eq, channel_axis=None)
# ---------------------- 3.3.4 直方图计量增强(对比度自适应) ----------------------
# 计算直方图均值和方差
hist = cv2.calcHist([img], [0], None, [256], [0,256])
mean_gray = np.sum(np.arange(256) * hist) / img.size
std_gray = np.sqrt(np.sum(((np.arange(256) - mean_gray)**2) * hist) / img.size)
# 自适应增强:拉伸到均值±2σ
lower = max(0, mean_gray - 2 * std_gray)
upper = min(255, mean_gray + 2 * std_gray)
img_metric = np.clip((img - lower) * 255 / (upper - lower), 0, 255).astype(np.uint8)
# ---------------------- 可视化 ----------------------
plt.figure(figsize=(16, 10))
# 原始图像及直方图
plt.subplot(4, 2, 1)
plt.imshow(img, cmap='gray')
plt.title('原始低对比度图像')
plt.axis('off')
plt.subplot(4, 2, 2)
plt.hist(img.ravel(), bins=256, range=[0,255], alpha=0.7)
plt.title('原始图像直方图')
plt.xlabel('灰度值')
plt.ylabel('像素数')
# 全局均衡化
plt.subplot(4, 2, 3)
plt.imshow(img_eq, cmap='gray')
plt.title('3.3.1 全局直方图均衡化')
plt.axis('off')
plt.subplot(4, 2, 4)
plt.hist(img_eq.ravel(), bins=256, range=[0,255], alpha=0.7)
plt.title('均衡化后直方图')
plt.xlabel('灰度值')
plt.ylabel('像素数')
# 直方图匹配
plt.subplot(4, 2, 5)
plt.imshow(img_matched, cmap='gray')
plt.title('3.3.2 直方图匹配(规定化)')
plt.axis('off')
plt.subplot(4, 2, 6)
plt.hist(img_matched.ravel(), bins=256, range=[0,255], alpha=0.7)
plt.title('匹配后直方图')
plt.xlabel('灰度值')
plt.ylabel('像素数')
# 局部直方图均衡化
plt.subplot(4, 2, 7)
plt.imshow(img_clahe, cmap='gray')
plt.title('3.3.3 局部直方图均衡化(CLAHE)')
plt.axis('off')
# 直方图计量增强
plt.subplot(4, 2, 8)
plt.imshow(img_metric, cmap='gray')
plt.title('3.3.4 直方图计量增强')
plt.axis('off')
plt.tight_layout()
plt.show()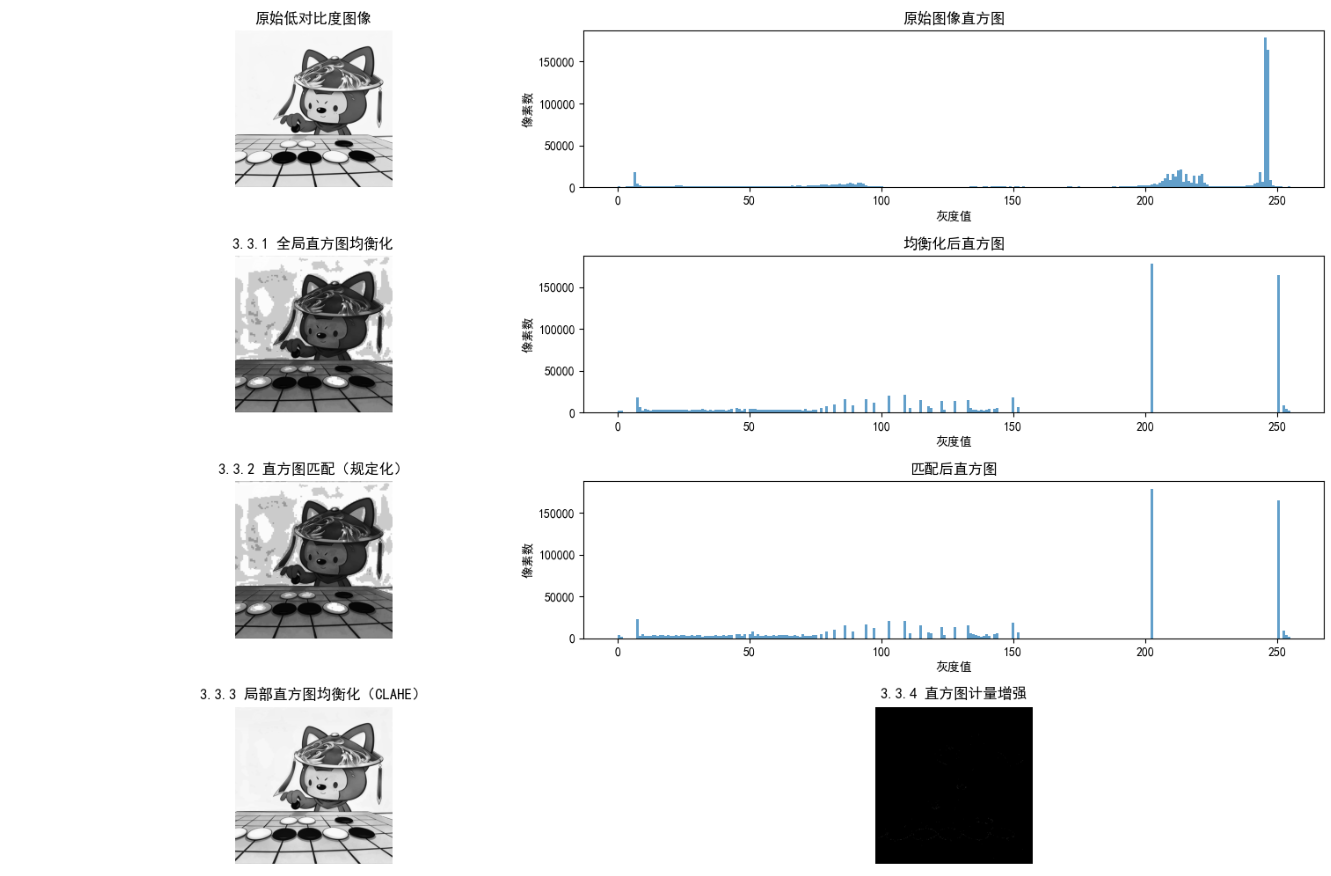
效果说明
- 直方图均衡化:全局拉伸灰度分布,提升整体对比度,但可能过度增强噪声;
- 直方图匹配:将图像直方图匹配到指定分布,精准控制增强效果;
- 局部直方图处理(CLAHE):分块均衡化,避免全局均衡化的过增强问题,保留局部细节;
- 直方图计量增强:基于统计特征(均值、方差)自适应增强,更鲁棒。
3.4 空间滤波基础
核心原理
空间滤波的核心是滤波器核 (Kernel)与图像的相关 / 卷积运算:
- 相关:核直接滑过图像,对应位置相乘求和;
- 卷积:核先旋转 180°,再做相关运算。
完整代码实现
import numpy as np
import cv2
import matplotlib.pyplot as plt
# 设置中文显示
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
# 读取图像
img = cv2.imread('lena.jpg', cv2.IMREAD_GRAYSCALE)
# ---------------------- 3.4.1 线性空间滤波原理 ----------------------
# 自定义线性滤波函数(手动实现,理解原理)
def linear_filter(img, kernel):
# 获取核大小和图像尺寸
k_h, k_w = kernel.shape
img_h, img_w = img.shape
# 计算填充大小(保持输出尺寸与输入一致)
pad_h = k_h // 2
pad_w = k_w // 2
# 零填充
img_pad = np.pad(img, ((pad_h, pad_h), (pad_w, pad_w)), mode='constant')
# 初始化输出图像
output = np.zeros_like(img, dtype=np.float32)
# 滑窗遍历
for i in range(img_h):
for j in range(img_w):
# 提取邻域
neighborhood = img_pad[i:i+k_h, j:j+k_w]
# 加权求和(相关运算)
output[i, j] = np.sum(neighborhood * kernel)
# 归一化到[0,255]
output = np.clip(output, 0, 255).astype(np.uint8)
return output
# ---------------------- 3.4.2 空间相关与卷积对比 ----------------------
# 定义3x3均值核
kernel = np.ones((3,3)) / 9
# 手动实现的相关运算
img_correlate = linear_filter(img, kernel)
# OpenCV的滤波(默认相关)
img_cv_correlate = cv2.filter2D(img, -1, kernel)
# 卷积运算(核旋转180°后相关)
kernel_rot = np.rot90(kernel, 2) # 旋转180°
img_convolve = linear_filter(img, kernel_rot)
# ---------------------- 3.4.3 可分离滤波器核 ----------------------
# 可分离核:3x3高斯核 = 1x3高斯核 × 3x1高斯核
gauss_1d = np.array([1, 2, 1]) / 4
gauss_2d = np.outer(gauss_1d, gauss_1d) # 外积生成2D核
# 分离滤波:先行后列
img_sep_1 = cv2.filter2D(img, -1, gauss_1d.reshape(1,3)) # 行滤波
img_sep_2 = cv2.filter2D(img_sep_1, -1, gauss_1d.reshape(3,1)) # 列滤波
# 直接2D滤波
img_2d = cv2.filter2D(img, -1, gauss_2d)
# ---------------------- 3.4.4 空域/频域滤波对比 ----------------------
# 空域高斯滤波
img_spatial = cv2.GaussianBlur(img, (5,5), 1.5)
# 频域高斯滤波(简化版)
# 1. 图像补零到2的幂次
h, w = img.shape
new_h = cv2.getOptimalDFTSize(h)
new_w = cv2.getOptimalDFTSize(w)
img_pad = np.zeros((new_h, new_w), dtype=np.float32)
img_pad[:h, :w] = img / 255.0
# 2. 傅里叶变换
dft = cv2.dft(img_pad, flags=cv2.DFT_COMPLEX_OUTPUT)
dft_shift = np.fft.fftshift(dft)
# 3. 构建频域高斯低通核
crow, ccol = new_h//2, new_w//2
mask = np.zeros((new_h, new_w, 2), dtype=np.float32)
x, y = np.meshgrid(np.arange(new_w), np.arange(new_h))
distance = np.sqrt((x - ccol)**2 + (y - crow)**2)
mask = np.exp(-(distance**2) / (2 * (1.5*2)**2))
mask = np.stack([mask, mask], axis=-1)
# 4. 频域滤波
dft_filtered = dft_shift * mask
dft_ishift = np.fft.ifftshift(dft_filtered)
img_freq = cv2.idft(dft_ishift)
img_freq = cv2.magnitude(img_freq[:, :, 0], img_freq[:, :, 1])
img_freq = (img_freq / np.max(img_freq) * 255).astype(np.uint8)
img_freq = img_freq[:h, :w] # 裁剪回原尺寸
# ---------------------- 3.4.5 构建空间滤波器核 ----------------------
# 自定义3x3拉普拉斯核
laplacian_kernel = np.array([[0, 1, 0],
[1, -4, 1],
[0, 1, 0]])
img_laplacian = cv2.filter2D(img, -1, laplacian_kernel)
# ---------------------- 可视化 ----------------------
plt.figure(figsize=(18, 12))
# 相关与卷积
plt.subplot(3, 4, 1)
plt.imshow(img, cmap='gray')
plt.title('原始图像')
plt.axis('off')
plt.subplot(3, 4, 2)
plt.imshow(img_correlate, cmap='gray')
plt.title('3.4.2 手动相关运算')
plt.axis('off')
plt.subplot(3, 4, 3)
plt.imshow(img_convolve, cmap='gray')
plt.title('3.4.2 手动卷积运算')
plt.axis('off')
plt.subplot(3, 4, 4)
plt.imshow(img_cv_correlate, cmap='gray')
plt.title('OpenCV相关运算')
plt.axis('off')
# 可分离核
plt.subplot(3, 4, 5)
plt.imshow(img_sep_2, cmap='gray')
plt.title('3.4.3 可分离核滤波(分离实现)')
plt.axis('off')
plt.subplot(3, 4, 6)
plt.imshow(img_2d, cmap='gray')
plt.title('3.4.3 可分离核滤波(2D实现)')
plt.axis('off')
# 空域/频域对比
plt.subplot(3, 4, 7)
plt.imshow(img_spatial, cmap='gray')
plt.title('3.4.4 空域高斯滤波')
plt.axis('off')
plt.subplot(3, 4, 8)
plt.imshow(img_freq, cmap='gray')
plt.title('3.4.4 频域高斯滤波')
plt.axis('off')
# 自定义核
plt.subplot(3, 4, 9)
plt.imshow(img_laplacian, cmap='gray')
plt.title('3.4.5 自定义拉普拉斯核滤波')
plt.axis('off')
plt.tight_layout()
plt.show()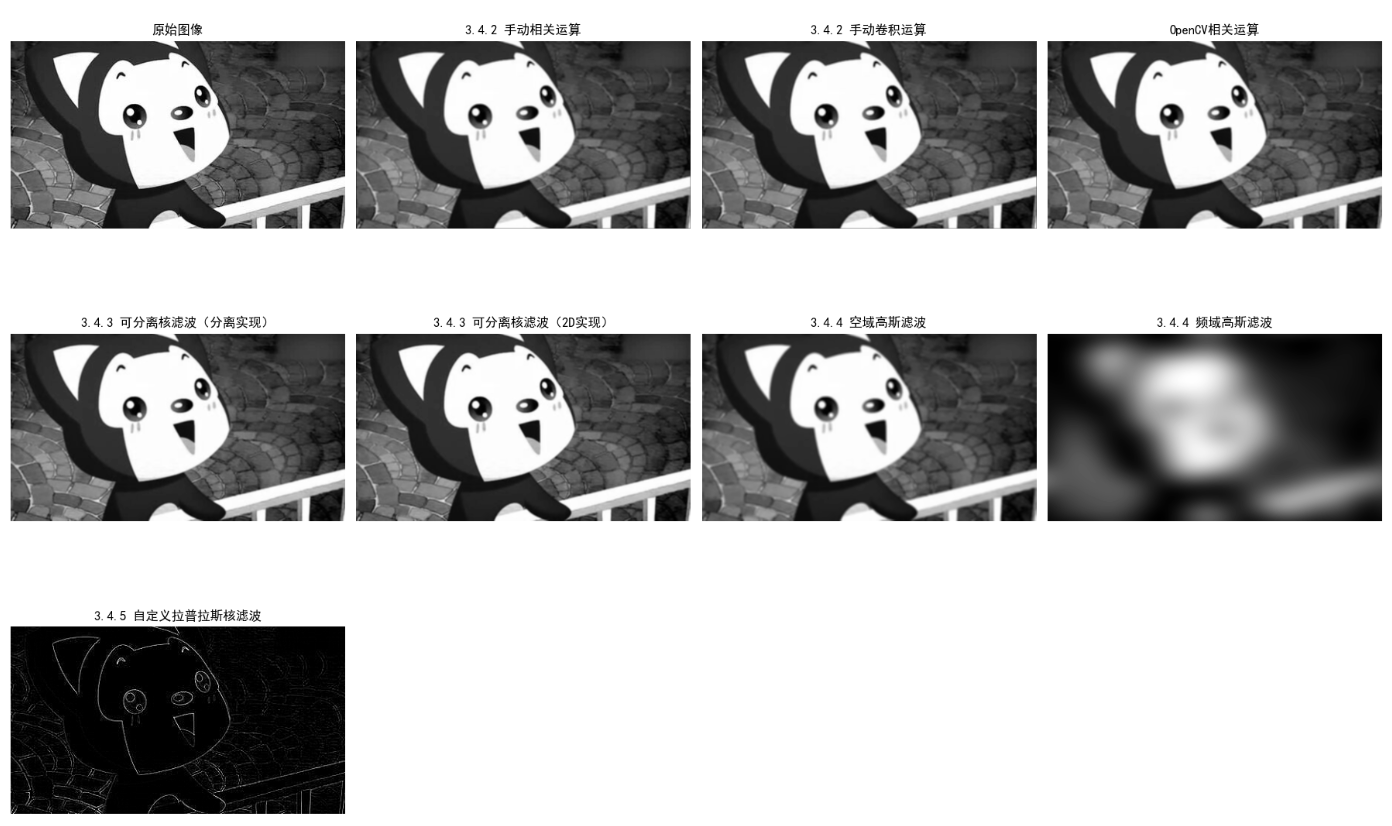
核心知识点总结
- 相关 vs 卷积:线性滤波中,若核是对称的(如均值、高斯),相关和卷积结果一致;非对称核(如 Sobel)需注意区别;
- 可分离核:将 2D 核分解为两个 1D 核,可将时间复杂度从 O (n²) 降为 O (n),提升效率;
- 空域 vs 频域滤波:空域直观、易实现,频域适合复杂滤波(如带阻 / 带通),但计算成本更高。
3.5 平滑(低通)空间滤波器
核心原理
低通滤波器通过抑制高频分量(边缘、噪声)实现图像平滑,分为线性(均值、高斯)和非线性(中值、最大值、最小值)两类。
完整代码实现
import numpy as np
import cv2
import matplotlib.pyplot as plt
# 设置中文显示
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
# 读取含噪声的图像(添加椒盐噪声)
img = cv2.imread('lena.jpg', cv2.IMREAD_GRAYSCALE)
# 添加椒盐噪声
def add_salt_pepper_noise(img, prob=0.05):
output = np.copy(img)
# 盐噪声(白)
salt = np.random.rand(*img.shape) < prob/2
output[salt] = 255
# 椒噪声(黑)
pepper = np.random.rand(*img.shape) < prob/2
output[pepper] = 0
return output
img_noise = add_salt_pepper_noise(img)
# ---------------------- 3.5.1 盒式滤波器核(均值滤波) ----------------------
# 3x3盒式核
kernel_box = np.ones((3,3)) / 9
img_box = cv2.filter2D(img_noise, -1, kernel_box)
# 5x5均值滤波(OpenCV内置)
img_blur = cv2.blur(img_noise, (5,5))
# ---------------------- 3.5.2 低通高斯滤波器核 ----------------------
# 3x3高斯滤波(σ=1)
img_gauss = cv2.GaussianBlur(img_noise, (3,3), 1)
# 5x5高斯滤波(σ=2)
img_gauss_large = cv2.GaussianBlur(img_noise, (5,5), 2)
# ---------------------- 3.5.3 统计排序(非线性)滤波器 ----------------------
# 中值滤波(最适合椒盐噪声)
img_median = cv2.medianBlur(img_noise, 3)
# 最大值滤波(去除椒噪声)
img_max = cv2.dilate(img_noise, np.ones((3,3)))
# 最小值滤波(去除盐噪声)
img_min = cv2.erode(img_noise, np.ones((3,3)))
# ---------------------- 可视化 ----------------------
plt.figure(figsize=(16, 12))
# 原始噪声图像
plt.subplot(3, 4, 1)
plt.imshow(img_noise, cmap='gray')
plt.title('含椒盐噪声的原始图像')
plt.axis('off')
# 盒式滤波器
plt.subplot(3, 4, 2)
plt.imshow(img_box, cmap='gray')
plt.title('3.5.1 3x3盒式滤波器')
plt.axis('off')
plt.subplot(3, 4, 3)
plt.imshow(img_blur, cmap='gray')
plt.title('3.5.1 5x5均值滤波')
plt.axis('off')
# 高斯滤波器
plt.subplot(3, 4, 4)
plt.imshow(img_gauss, cmap='gray')
plt.title('3.5.2 3x3高斯滤波(σ=1)')
plt.axis('off')
plt.subplot(3, 4, 5)
plt.imshow(img_gauss_large, cmap='gray')
plt.title('3.5.2 5x5高斯滤波(σ=2)')
plt.axis('off')
# 统计排序滤波器
plt.subplot(3, 4, 6)
plt.imshow(img_median, cmap='gray')
plt.title('3.5.3 中值滤波(3x3)')
plt.axis('off')
plt.subplot(3, 4, 7)
plt.imshow(img_max, cmap='gray')
plt.title('3.5.3 最大值滤波(去椒噪声)')
plt.axis('off')
plt.subplot(3, 4, 8)
plt.imshow(img_min, cmap='gray')
plt.title('3.5.3 最小值滤波(去盐噪声)')
plt.axis('off')
# 对比:原始无噪声图像
plt.subplot(3, 4, 9)
plt.imshow(img, cmap='gray')
plt.title('原始无噪声图像')
plt.axis('off')
plt.tight_layout()
plt.show()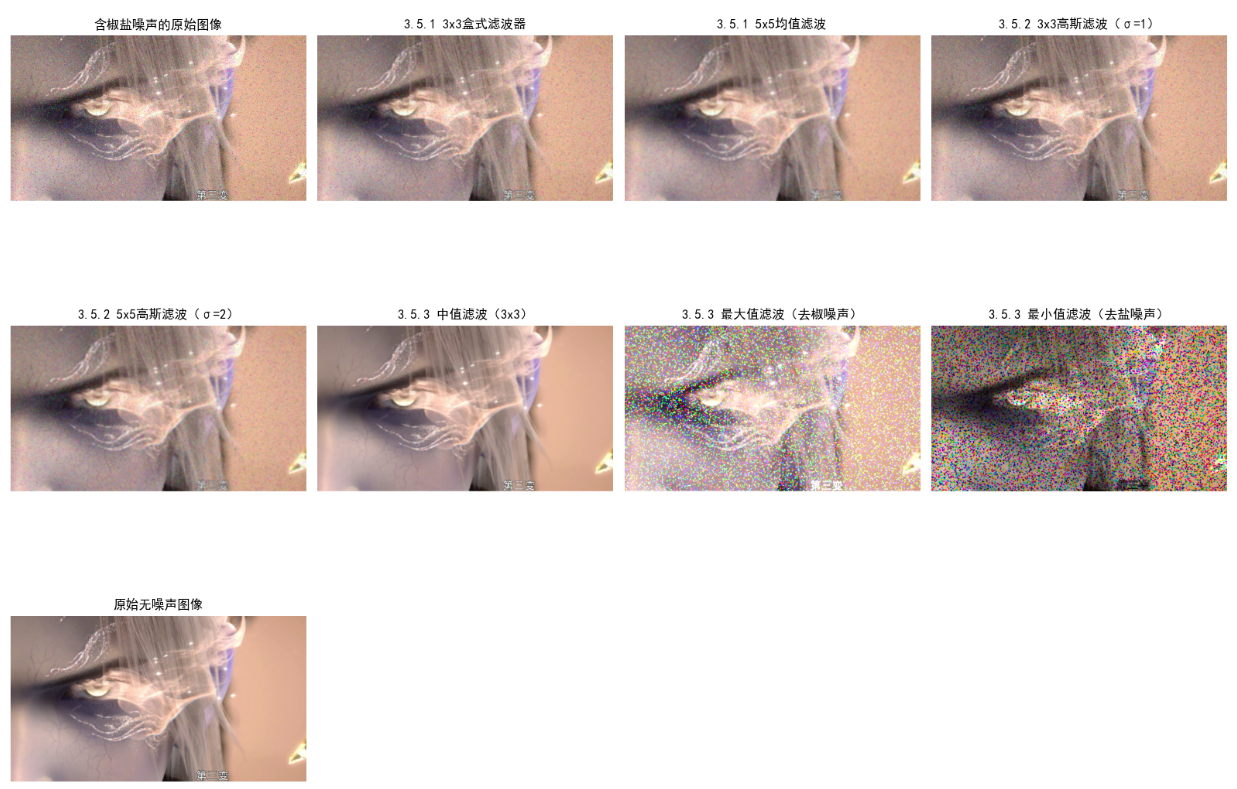
效果说明
- 盒式滤波器:简单但易模糊边缘,核越大模糊越严重;
- 高斯滤波器:平滑的同时保留更多边缘细节,σ 越大平滑效果越强;
- 中值滤波:非线性滤波,是去除椒盐噪声的最优选择,不会产生模糊;
- 最大值 / 最小值滤波:分别适合去除椒噪声 / 盐噪声,也可用于形态学操作。
3.6 锐化(高通)空间滤波器
核心原理
高通滤波器通过增强高频分量(边缘、细节)实现图像锐化,核心是提取图像的梯度 / 二阶导数。
完整代码实现(含效果对比)
import numpy as np
import cv2
import matplotlib.pyplot as plt
# 设置中文显示
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
# 读取图像
img = cv2.imread('lena.jpg', cv2.IMREAD_GRAYSCALE)
# 先轻微平滑(去噪声),避免锐化放大噪声
img_smooth = cv2.GaussianBlur(img, (3,3), 0.5)
# ---------------------- 3.6.2 拉普拉斯算子(二阶导数) ----------------------
# 4邻域拉普拉斯核
laplacian_4 = np.array([[0, 1, 0],
[1, -4, 1],
[0, 1, 0]])
# 8邻域拉普拉斯核
laplacian_8 = np.array([[1, 1, 1],
[1, -8, 1],
[1, 1, 1]])
# 拉普拉斯滤波(提取边缘)
img_lap4 = cv2.filter2D(img_smooth, cv2.CV_64F, laplacian_4)
img_lap8 = cv2.filter2D(img_smooth, cv2.CV_64F, laplacian_8)
# 锐化图像 = 原始图像 - 拉普拉斯图像(增强边缘)
img_sharpen_lap4 = img - img_lap4
img_sharpen_lap8 = img - img_lap8
# 归一化到[0,255]
img_sharpen_lap4 = np.clip(img_sharpen_lap4, 0, 255).astype(np.uint8)
img_sharpen_lap8 = np.clip(img_sharpen_lap8, 0, 255).astype(np.uint8)
# ---------------------- 3.6.3 钝化掩蔽和高提升滤波 ----------------------
# 钝化掩蔽:原始 - 模糊
img_blur = cv2.GaussianBlur(img, (5,5), 1)
mask = img - img_blur
img_unsharp = img + mask # 钝化掩蔽
# 高提升滤波:原始 + k*mask(k>1)
k = 2
img_high_boost = img + k * mask
img_high_boost = np.clip(img_high_boost, 0, 255).astype(np.uint8)
# ---------------------- 3.6.4 一阶导数锐化(梯度) ----------------------
# Sobel算子(梯度)
# x方向梯度
sobel_x = cv2.Sobel(img_smooth, cv2.CV_64F, 1, 0, ksize=3)
# y方向梯度
sobel_y = cv2.Sobel(img_smooth, cv2.CV_64F, 0, 1, ksize=3)
# 梯度幅值
sobel_mag = np.sqrt(sobel_x**2 + sobel_y**2)
sobel_mag = (sobel_mag / np.max(sobel_mag) * 255).astype(np.uint8)
# Prewitt算子
prewitt_x = np.array([[-1, 0, 1],
[-1, 0, 1],
[-1, 0, 1]])
prewitt_y = np.array([[-1, -1, -1],
[0, 0, 0],
[1, 1, 1]])
img_prewitt_x = cv2.filter2D(img_smooth, cv2.CV_64F, prewitt_x)
img_prewitt_y = cv2.filter2D(img_smooth, cv2.CV_64F, prewitt_y)
prewitt_mag = np.sqrt(img_prewitt_x**2 + img_prewitt_y**2)
prewitt_mag = (prewitt_mag / np.max(prewitt_mag) * 255).astype(np.uint8)
# ---------------------- 可视化 ----------------------
plt.figure(figsize=(18, 12))
# 原始图像
plt.subplot(4, 4, 1)
plt.imshow(img, cmap='gray')
plt.title('原始图像')
plt.axis('off')
# 拉普拉斯锐化
plt.subplot(4, 4, 2)
plt.imshow(img_sharpen_lap4, cmap='gray')
plt.title('3.6.2 4邻域拉普拉斯锐化')
plt.axis('off')
plt.subplot(4, 4, 3)
plt.imshow(img_sharpen_lap8, cmap='gray')
plt.title('3.6.2 8邻域拉普拉斯锐化')
plt.axis('off')
# 钝化掩蔽和高提升
plt.subplot(4, 4, 4)
plt.imshow(img_unsharp, cmap='gray')
plt.title('3.6.3 钝化掩蔽')
plt.axis('off')
plt.subplot(4, 4, 5)
plt.imshow(img_high_boost, cmap='gray')
plt.title('3.6.3 高提升滤波(k=2)')
plt.axis('off')
# Sobel梯度
plt.subplot(4, 4, 6)
plt.imshow(sobel_mag, cmap='gray')
plt.title('3.6.4 Sobel梯度幅值')
plt.axis('off')
# Prewitt梯度
plt.subplot(4, 4, 7)
plt.imshow(prewitt_mag, cmap='gray')
plt.title('3.6.4 Prewitt梯度幅值')
plt.axis('off')
# 拉普拉斯边缘
plt.subplot(4, 4, 8)
plt.imshow(np.abs(img_lap4).astype(np.uint8), cmap='gray')
plt.title('4邻域拉普拉斯边缘')
plt.axis('off')
plt.tight_layout()
plt.show()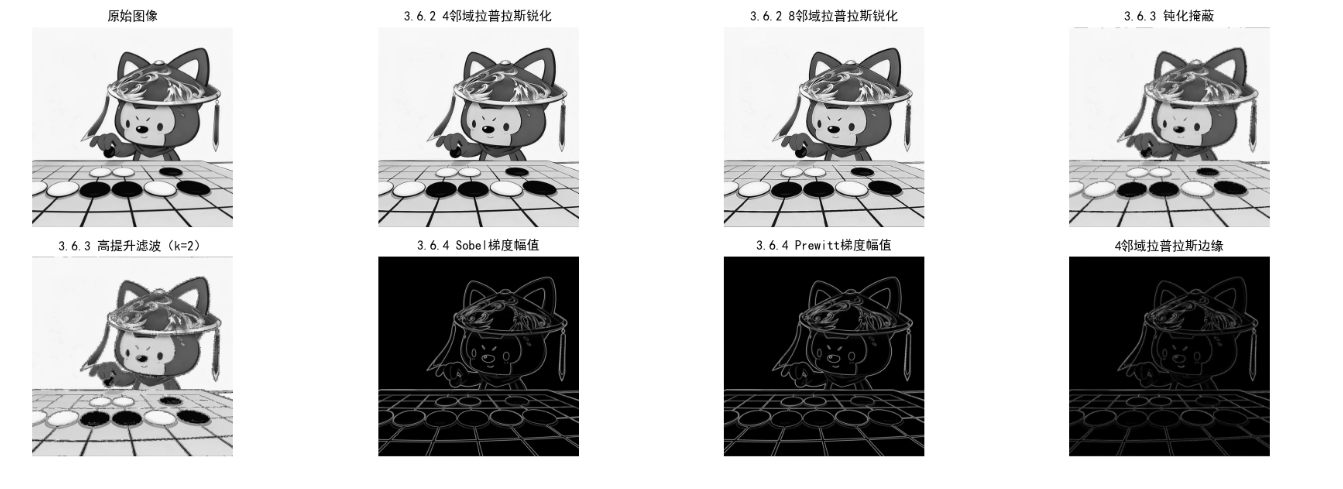
效果说明
- 拉普拉斯算子:对噪声敏感,需先平滑;8 邻域比 4 邻域提取的边缘更完整;
- 钝化掩蔽 / 高提升滤波:实用的锐化方法,k 越大锐化效果越强,但易放大噪声;
- 梯度算子(Sobel/Prewitt):Sobel 加入了高斯权重,抗噪声能力更强,是工程中常用的边缘检测算子。
3.7 低通、高通、带阻和带通滤波器
核心原理
- 低通:保留低频(平滑),抑制高频(边缘 / 噪声);
- 高通:保留高频(边缘),抑制低频(背景);
- 带阻:抑制指定频率范围(如周期性噪声);
- 带通:保留指定频率范围(如提取特定尺度的边缘)。
完整代码实现
import numpy as np
import cv2
import matplotlib.pyplot as plt
# 设置中文显示
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
# 读取图像
img = cv2.imread('lena.jpg', cv2.IMREAD_GRAYSCALE)
h, w = img.shape
# 傅里叶变换(频域处理)
def dft_process(img):
# 补零到最优尺寸
new_h = cv2.getOptimalDFTSize(h)
new_w = cv2.getOptimalDFTSize(w)
img_pad = np.zeros((new_h, new_w), dtype=np.float32)
img_pad[:h, :w] = img / 255.0
# 傅里叶变换
dft = cv2.dft(img_pad, flags=cv2.DFT_COMPLEX_OUTPUT)
return np.fft.fftshift(dft), new_h, new_w
def idft_process(dft_shift, new_h, new_w):
# 逆傅里叶变换
dft_ishift = np.fft.ifftshift(dft_shift)
img_back = cv2.idft(dft_ishift)
img_back = cv2.magnitude(img_back[:, :, 0], img_back[:, :, 1])
# 归一化并裁剪
img_back = (img_back / np.max(img_back) * 255).astype(np.uint8)
return img_back[:h, :w]
# 生成频域掩码
dft_shift, new_h, new_w = dft_process(img)
crow, ccol = new_h//2, new_w//2
x, y = np.meshgrid(np.arange(new_w), np.arange(new_h))
distance = np.sqrt((x - ccol)**2 + (y - crow)**2)
# ---------------------- 低通滤波器(高斯) ----------------------
low_pass_mask = np.exp(-(distance**2) / (2 * 30**2))
low_pass_mask = np.stack([low_pass_mask, low_pass_mask], axis=-1)
dft_low = dft_shift * low_pass_mask
img_low = idft_process(dft_low, new_h, new_w)
# ---------------------- 高通滤波器(高斯) ----------------------
high_pass_mask = 1 - low_pass_mask
dft_high = dft_shift * high_pass_mask
img_high = idft_process(dft_high, new_h, new_w)
# ---------------------- 带阻滤波器(去除指定频率) ----------------------
# 抑制距离中心50-80的频率
band_stop_mask = np.ones_like(dft_shift)
band_stop_mask[(distance >= 50) & (distance <= 80)] = 0
dft_band_stop = dft_shift * band_stop_mask
img_band_stop = idft_process(dft_band_stop, new_h, new_w)
# ---------------------- 带通滤波器(保留指定频率) ----------------------
band_pass_mask = np.zeros_like(dft_shift)
band_pass_mask[(distance >= 50) & (distance <= 80)] = 1
dft_band_pass = dft_shift * band_pass_mask
img_band_pass = idft_process(dft_band_pass, new_h, new_w)
# ---------------------- 可视化 ----------------------
plt.figure(figsize=(16, 12))
plt.subplot(2, 4, 1)
plt.imshow(img, cmap='gray')
plt.title('原始图像')
plt.axis('off')
plt.subplot(2, 4, 2)
plt.imshow(img_low, cmap='gray')
plt.title('3.7 低通滤波器')
plt.axis('off')
plt.subplot(2, 4, 3)
plt.imshow(img_high, cmap='gray')
plt.title('3.7 高通滤波器')
plt.axis('off')
plt.subplot(2, 4, 4)
plt.imshow(img_band_stop, cmap='gray')
plt.title('3.7 带阻滤波器')
plt.axis('off')
plt.subplot(2, 4, 5)
plt.imshow(img_band_pass, cmap='gray')
plt.title('3.7 带通滤波器')
plt.axis('off')
# 掩码可视化
plt.subplot(2, 4, 6)
plt.imshow(low_pass_mask[:, :, 0], cmap='gray')
plt.title('低通掩码')
plt.axis('off')
plt.subplot(2, 4, 7)
plt.imshow(high_pass_mask[:, :, 0], cmap='gray')
plt.title('高通掩码')
plt.axis('off')
plt.subplot(2, 4, 8)
plt.imshow(band_stop_mask[:, :, 0], cmap='gray')
plt.title('带阻掩码')
plt.axis('off')
plt.tight_layout()
plt.show()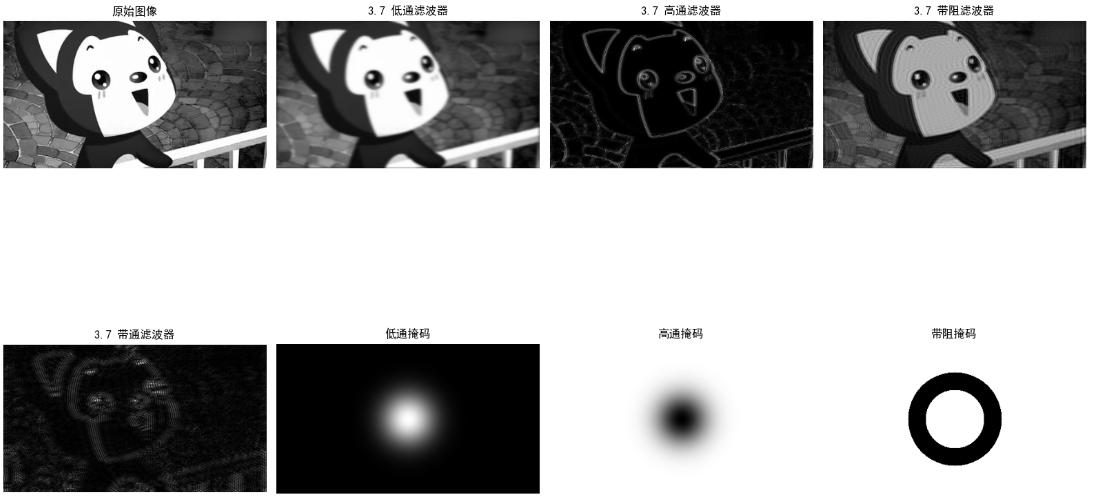
3.8 组合使用空间增强方法
应用场景
实际项目中,单一增强方法往往效果有限,需组合多种方法(如先去噪→再增强对比度→最后锐化)。
完整代码实现
import numpy as np
import cv2
import matplotlib.pyplot as plt
# 设置中文显示
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
# 模拟低质量图像(噪声+低对比度+模糊)
img = cv2.imread('lena.jpg', cv2.IMREAD_GRAYSCALE)
# 1. 添加高斯噪声
img_noise = img + np.random.normal(0, 15, img.shape).astype(np.uint8)
# 2. 降低对比度
img_low_contrast = cv2.convertScaleAbs(img_noise, alpha=0.6, beta=30)
# 3. 模糊
img_blur = cv2.GaussianBlur(img_low_contrast, (3,3), 1)
# 最终低质量图像
img_bad = img_blur
# ---------------------- 组合增强流程 ----------------------
# 步骤1:中值滤波去噪声
img_step1 = cv2.medianBlur(img_bad, 3)
# 步骤2:CLAHE增强局部对比度
clahe = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8,8))
img_step2 = clahe.apply(img_step1)
# 步骤3:高提升滤波锐化
img_blur_step3 = cv2.GaussianBlur(img_step2, (5,5), 1)
mask = img_step2 - img_blur_step3
img_step3 = img_step2 + 1.5 * mask
img_step3 = np.clip(img_step3, 0, 255).astype(np.uint8)
# ---------------------- 可视化 ----------------------
plt.figure(figsize=(16, 8))
plt.subplot(2, 3, 1)
plt.imshow(img, cmap='gray')
plt.title('原始高质量图像')
plt.axis('off')
plt.subplot(2, 3, 2)
plt.imshow(img_bad, cmap='gray')
plt.title('低质量图像(噪声+低对比度+模糊)')
plt.axis('off')
plt.subplot(2, 3, 3)
plt.imshow(img_step1, cmap='gray')
plt.title('步骤1:中值滤波去噪声')
plt.axis('off')
plt.subplot(2, 3, 4)
plt.imshow(img_step2, cmap='gray')
plt.title('步骤2:CLAHE增强对比度')
plt.axis('off')
plt.subplot(2, 3, 5)
plt.imshow(img_step3, cmap='gray')
plt.title('步骤3:高提升滤波锐化')
plt.axis('off')
# 对比直方图
plt.subplot(2, 3, 6)
plt.hist(img_bad.ravel(), bins=256, range=[0,255], alpha=0.5, label='低质量')
plt.hist(img_step3.ravel(), bins=256, range=[0,255], alpha=0.5, label='增强后')
plt.title('直方图对比')
plt.xlabel('灰度值')
plt.ylabel('像素数')
plt.legend()
plt.tight_layout()
plt.show()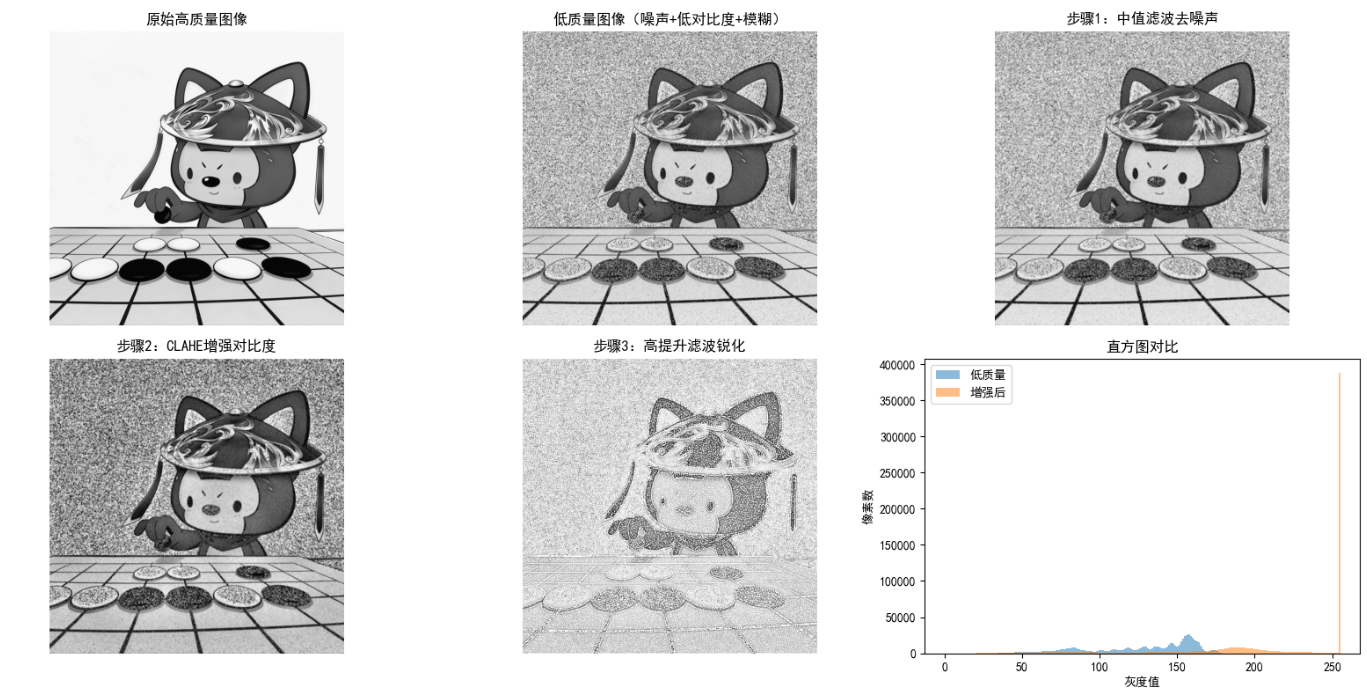
效果说明
组合增强的核心逻辑是先去噪→再增强对比度→最后锐化,避免锐化放大噪声、对比度增强放大噪声等问题,是工程中最常用的图像增强流程。
总结
本章系统讲解了灰度变换与空间滤波的核心知识点,从基础原理到代码实现,结合可视化对比让每个知识点都直观易懂。核心要点:
- 灰度变换是点操作,适合全局对比度 / 亮度调整;
- 空间滤波是邻域操作,分为平滑(低通)和锐化(高通);
- 实际应用中需组合多种方法,遵循 "去噪→增强→锐化" 的流程;
- 频域滤波适合复杂滤波器(如带阻 / 带通),空域滤波更易实现和部署。
所有代码均可直接运行,建议读者替换不同的测试图像(如低对比度、含噪声、模糊图像),调整参数(如核大小、γ 值、σ 值),观察效果变化,加深对知识点的理解。