版本确认
Isaac Sim 4.5.0
Isaac Lab v2.1.0
Unitree RL Lab lab21 (分支)
一、配置基础环境
1. 配置系统必要的环境
bash
sudo apt update
bash
sudo apt install -y build-essential cmake git ffmpeg libpython3-dev python3-pip libgl1-mesa-dev libglib2.0-02. 换源
配置 Pip 镜像源 (清华源):
bash
pip config set global.index-url https://pypi.tuna.tsinghua.edu.cn/simple二、安装 Isaac Sim 4.5.0
note: ubuntu20.04只能安装Isaac Sim的4.x版本,且无法通过pip安装,仅可以通过预构建二进制安装等方式。
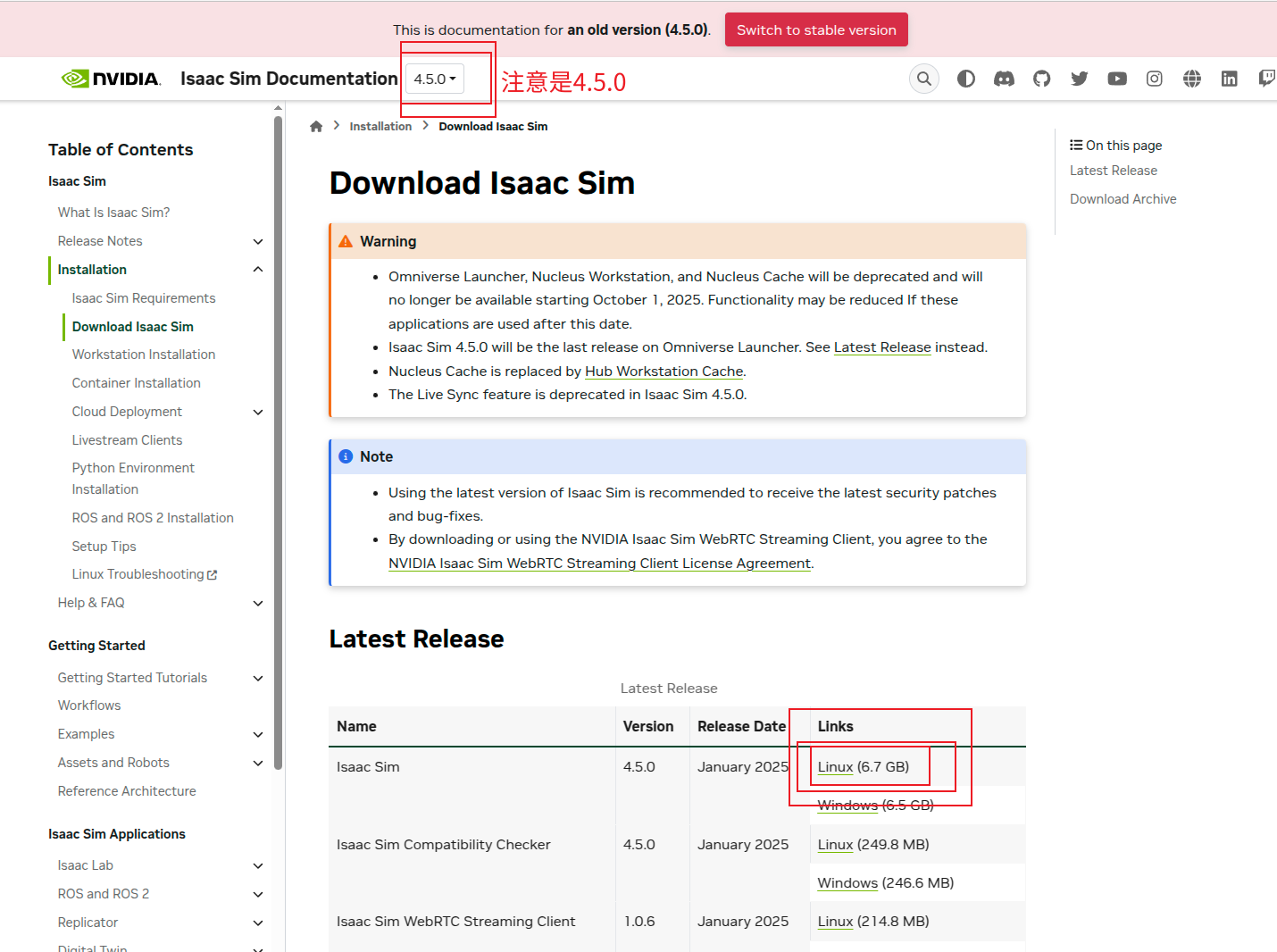
1. 下载Isaac Sim 4.5
访问 NVIDIA 官方下载页面,选择 Isaac Sim 4.5.0 的 Linux 版本进行下载
https://docs.isaacsim.omniverse.nvidia.com/4.5.0/installation/download.html
会下载得到一个压缩包isaac-sim-standalone-4.5.0-linux-x86_64.zip
2.解压与安装
在home目录新建一个文件夹,名称为isaac-sim-4-5-0或其他自定义的。然后将解压后的压缩包的文件copy到新建的IsaacSim中。
注意,是打开解压后的文件夹isaac-sim-standalone-4.5.0-linux-x86_64,把里面的文件都copy或者剪切过去。
然后执行下面脚本进行安装
bash
cd ~/isaac-sim-4-5-0 # 这里的文件夹的名称要和你新建的文件夹名称一致
./post_install.sh
运行选择器脚本(仍在~/isaac-sim-4-5-0目录下)
bash
./isaac-sim.selector.sh 
点击 START 即可启动。
可能会比较久,请耐心等待页面加载完全,网格什么的都显示出来就可以了。
3. 修改.bashrc
将 Isaac Sim 路径添加到环境变量中。编辑 ~/.bashrc文件,添加以下内容(请将 /home/username替换为你的实际home目录路径):
bash
export ISAACSIM_PATH="/home/username/isaac-sim-4-5-0"
export ISAACSIM_PYTHON_EXE="${ISAACSIM_PATH}/python.sh"
alias isaacsim='${ISAACSIM_PATH}/isaac-sim.sh' # 这是一个快捷指令,以后你在终端输 isaacsim 就能启动仿真器使环境变量生效:
bash
source ~/.bashrc验证一下(这一步如果不报错,说明路径对上了):
bash
ls $ISAACSIM_PATH/isaac-sim.sh4. 验证
运行测试命令,如果能看到立方体场景,说明安装成功
bash
cd ~/isaac-sim-4-5-0
conda deactivate
./python.sh standalone_examples/api/isaacsim.core.api/add_cubes.py或者
bash
${ISAACSIM_PYTHON_EXE} ${ISAACSIM_PATH}/standalone_examples/api/isaacsim.core.api/add_cubes.py三、安装Isaac Lab v2.1.0
1.下载代码库
bash
cd ~
git clone https://github.com/isaac-sim/IsaacLab.git2. 进入Isaac Lab文件夹并切换版本
bash
cd ~/IsaacLab
git checkout v2.1.0验证一下,输出应该是v2.1.0
bash
git describe --tags3. 创建符号链接
让 Isaac Lab 知道 Isaac Sim 的位置。
bash
# 在 IsaacLab 目录下,创建指向 Isaac Sim 安装路径的软链接
# 注意替换username和isaac sim的文件夹名称
cd ~/IsaacLab
ln -s /home/username/isaac-sim-4-5-0 _isaac_sim4. 新建一个conda环境,之后的操作都在该环境进行
bash
conda create -n unitree_lab python=3.10 -y
bash
conda activate unitree_lab升级一下 pip 工具本身 (防止版本太老报错)
bash
pip install --upgrade pip5.
卸载冲突的包(清理环境)(确保你在 Isaac Lab 的环境里):
bash
pip uninstall -y opencv-python opencv-python-headless numpy安装兼容版本(强制指定版本): 我们需要安装支持 Numpy 1.x 的 OpenCV 老版本(通常 4.9 或 4.10 以下比较稳):
bash
pip install "numpy<2.0" "opencv-python<4.10"运行安装脚本
bash
./isaaclab.sh --install6. 验证
bash
source ~/isaac-sim-4-5-0/setup_conda_env.sh 运行一个示例脚本来检查是否安装成功
bash
./isaaclab.sh -p scripts/reinforcement_learning/rsl_rl/train.py --task=Isaac-Ant-v0 --headless 使用无头模式运行脚本,无可视化
bash
./isaaclab.sh -p scripts/reinforcement_learning/rsl_rl/train.py --task=Isaac-Ant-v0 可以在Isaac Sim的仿真器看到可视化