针孔相机模型(Pinhole Camera Model)是计算机视觉和摄影测量中最基础、最常用的成像模型。它描述了三维世界中的点是如何投影到二维图像平面上的。
详细推导可见针孔相机模型
基本定义
先定义四个坐标系:
- 世界坐标系 (World Coordinate System, O w O_w Ow): 真实世界的绝对坐标系,点记为 ( X w X_w Xw, Y w Y_w Yw, Z w Z_w Zw)。
- 相机坐标系 (Camera Coordinate System, O c O_c Oc): 以相机光心(针孔)为原点,Z轴为光轴(指向前方),点记为 ( X c X_c Xc, Y c Y_c Yc, Z c Z_c Zc)。
- 图像物理坐标系 (Image Plane Coordinate System, o): 位于光心前方焦距 f 处(为了方便计算,通常使用"虚拟成像平面"在前,避免图像倒立),单位通常是毫米,点记为 (x, y)。
- 像素坐标系 (Pixel Coordinate System, uv): 也就是我们最终看到的数字图像,原点通常在图像左上角,单位是像素,点记为 (u, v)。
这种特定的约束(绕 Y 轴旋转,平移仅限 X-Z 平面)在计算机视觉中非常常见,通常被称为 "平面运动模型" (Planar Motion Model)。这常见于在平坦地面上行驶的自动驾驶汽车或移动机器人。
这种约束会极大地简化针孔相机模型的推导结果,最核心的结论是:垂直方向(Y轴/v坐标)的投影变得非常简单且独立。
以下是详细的推导和简化分析:
1. 简化的外参矩阵
这种约束下,相机的运动受到以下限制:
- 旋转矩阵 R :只有绕 Y 轴的旋转(通常称为 Yaw/偏航角 ,记为 θ \theta θ)。
- 平移向量 t :只有 X 和 Z 分量(即相机高度不变, t y t_y ty = 0)。
旋转矩阵 R y ( θ ) R_y(\theta) Ry(θ)
平移向量 t t t
2. 推导相机坐标系 P c P_c Pc
将世界坐标 P w = X w , Y w , Z w T P_w = X_w, Y_w, Z_w^T Pw=Xw,Yw,ZwT 转换到相机坐标 P c = X c , Y c , Z c T P_c = X_c, Y_c, Z_c^T Pc=Xc,Yc,ZcT:
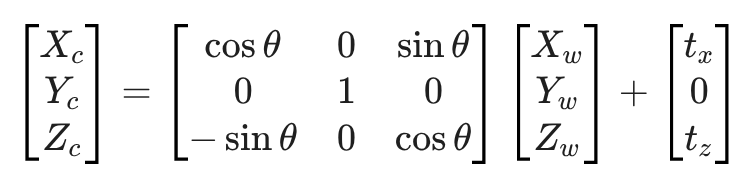
展开计算得到三个分量:
- X c = X w cos θ + Z w sin θ + t x X_c = X_w \cos\theta + Z_w \sin\theta + t_x Xc=Xwcosθ+Zwsinθ+tx
- Y c = Y w Y_c = Y_w Yc=Yw
- Z c = − X w sin θ + Z w cos θ + t z Z_c = -X_w \sin\theta + Z_w \cos\theta + t_z Zc=−Xwsinθ+Zwcosθ+tz
3. 推导像素坐标 (u, v)
代入针孔投影公式:
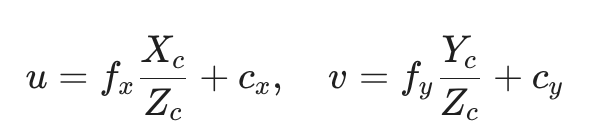
得到简化后的方程:
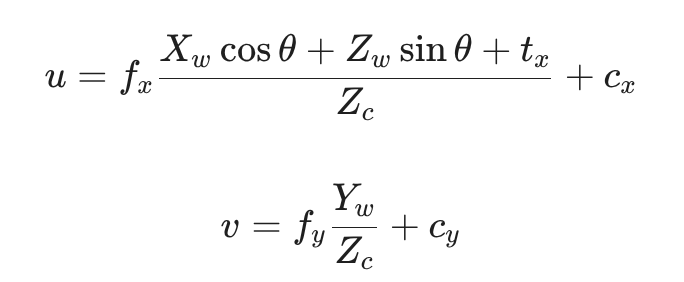
(其中 Z c = − X w sin θ + Z w cos θ + t z Z_c = -X_w \sin\theta + Z_w \cos\theta + t_z Zc=−Xwsinθ+Zwcosθ+tz)
4. 这种简化带来了什么?
这种约束带来了三个非常重要的几何特性,常用于车道线检测或地平面估计:
简化:地平面的投影 (Ground Plane Homography)------鸟瞰图的计算
即由 u , v u,v u,v求 X c , Z c X_c,Z_c Xc,Zc
对于地面上的点(假设地面为 Y w = H Y_w = H Yw=H,例如相机安装高度为 H H H,且向下为正),此时 Y w Y_w Yw 是常数。
那么 v v v 坐标和深度 Z c Z_c Zc 形成了一一对应的关系: v = f y H Z c + c y v = f_y \frac{H}{Z_c} + c_y v=fyZcH+cy
而 X c X_c Xc只与 u u u和 Z c Z_c Zc有关: u = f x X c Z c + c x u = f_x \frac{X_c}{Z_c} + c_x u=fxZcXc+cx
这意味着:
- 在平面运动模型下,只要知道一个点在图像里的 v v v 坐标(行号),并且知道相机离地高度 H H H,你就可以直接算出这个点距离你有多远 ( Z c Z_c Zc)然后就可以求出 X c X_c Xc
- 可以预先计算一张查找表,因为每个像素对应鸟瞰图的坐标是固定的。
总结
如果旋转只有绕 Y 轴,平移只有 X/Z:
- 几何上:相机在一个固定高度的水平面上滑行并左右转头。
- 数学上 : Y c = Y w Y_c = Y_w Yc=Yw。
- 应用上:可以通过像素的 v 坐标直接反推距离(假设地面平坦),极大地降低了单目测距的难度。
代码示例:
python
import cv2
import numpy as np
import matplotlib.pyplot as plt
def get_bev_image(image):
"""
演示如何从普通透视图生成鸟瞰图 (BEV)
核心原理:将梯形区域 (ROI) 映射为矩形区域
"""
h, w = image.shape[:2]
# ==========================================
# 1. 定义源点 (Source Points) - 梯形
# ==========================================
# 在实际工程中,这些点通常通过标定获得,
# 或者根据"消失点"和"车头盲区"来硬编码。
# 这里我们假设相机视野中,路面是一个梯形区域。
# 梯形下底(近处):通常覆盖整个图像宽度
src_bottom_left = [0, h]
src_bottom_right = [w, h]
# 梯形上底(远处):向图像中心收缩(模拟透视效果)
# 这里的 0.4 和 0.6 是调节视野远处的宽度,越小说明看得越远(消失点附近)
# 这里的 0.6 * h 是地平线以下的某个位置(截断天空)
horizon_h = int(0.6 * h)
src_top_left = [int(0.4 * w), horizon_h]
src_top_right = [int(0.6 * w), horizon_h]
src_points = np.float32([src_bottom_left, src_bottom_right, src_top_left, src_top_right])
# ==========================================
# 2. 定义目标点 (Destination Points) - 矩形
# ==========================================
# 在 BEV 空间中,我们希望原来的梯形变成一个直直的矩形。
# 这体现了"平行线在鸟瞰图中保持平行"的特性。
bev_w = w # 保持宽度一致
bev_h = h # 保持高度一致
# 为了让车道线变直,我们在目标图中,
# 让左边的点 x 坐标相同,右边的点 x 坐标相同。
offset_x = int(0.25 * w) # 预留一些左右边距
dst_bottom_left = [offset_x, bev_h]
dst_bottom_right = [bev_w - offset_x, bev_h]
dst_top_left = [offset_x, 0]
dst_top_right = [bev_w - offset_x, 0]
dst_points = np.float32([dst_bottom_left, dst_bottom_right, dst_top_left, dst_top_right])
# ==========================================
# 3. 计算单应性矩阵 (Homography Matrix)
# ==========================================
# M 就是将像素从 透视视图 -> 鸟瞰视图 的变换矩阵
M = cv2.getPerspectiveTransform(src_points, dst_points)
# ==========================================
# 4. 执行变换 (Warp Perspective)
# ==========================================
# linear 插值即可
bev_image = cv2.warpPerspective(image, M, (bev_w, bev_h), flags=cv2.INTER_LINEAR)
return src_points, bev_image
def create_dummy_road_image(width=800, height=600):
"""创建一个带有透视车道线的模拟图片"""
img = np.zeros((height, width, 3), dtype=np.uint8)
# 画地平线 (天空)
cv2.rectangle(img, (0, 0), (width, int(0.5*height)), (50, 50, 50), -1) # 灰色天空
cv2.rectangle(img, (0, int(0.5*height)), (width, height), (100, 100, 100), -1) # 深灰路面
# 画车道线 (透视效果:远处汇聚)
center_x = width // 2
vanish_y = int(0.5 * height) # 消失点在图像中心高度
# 左车道线
cv2.line(img, (center_x - 40, vanish_y), (100, height), (255, 255, 255), 10)
# 右车道线
cv2.line(img, (center_x + 40, vanish_y), (width - 100, height), (255, 255, 255), 10)
# 画一些横向的路标 (模拟距离感)
for i in range(1, 10):
y = vanish_y + i * i * 6 # 越近间隔越大
if y > height: break
# 根据相似三角形计算宽度
scale = (y - vanish_y) / (height - vanish_y)
w_line = int(600 * scale)
cv2.line(img, (center_x - w_line//2, y), (center_x + w_line//2, y), (0, 255, 255), 5)
return img
# ==================== 主程序 ====================
# 1. 创建模拟图
original_img = create_dummy_road_image()
# 2. 生成 BEV
src_pts, bev_img = get_bev_image(original_img)
# 3. 可视化结果
plt.figure(figsize=(12, 6))
# 显示原图 + ROI 框
plt.subplot(1, 2, 1)
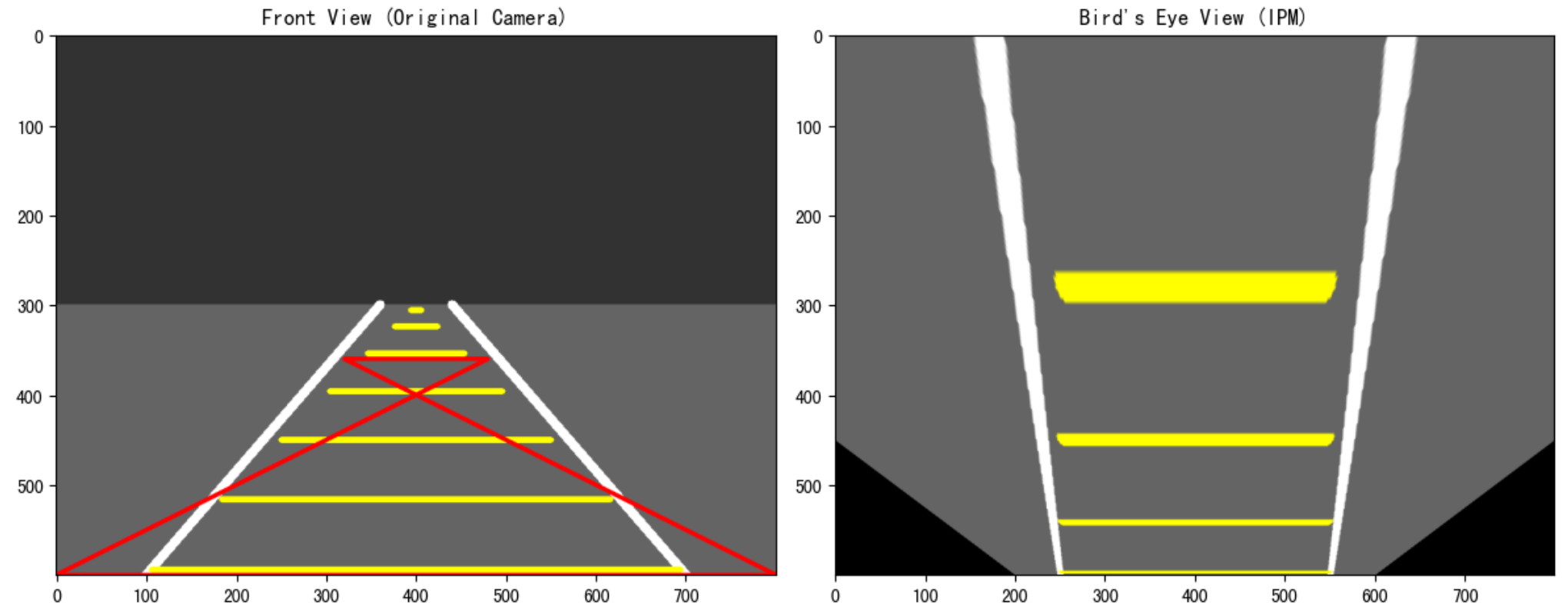
plt.title("Front View (Original Camera)")
plt.imshow(cv2.cvtColor(original_img, cv2.COLOR_BGR2RGB))
# 画出我们选择的变换区域 (梯形)
pts = src_pts.reshape((-1, 1, 2)).astype(np.int32)
cv2.polylines(original_img, [pts], True, (0, 0, 255), 3) # 红色框
plt.imshow(cv2.cvtColor(original_img, cv2.COLOR_BGR2RGB))
# 显示鸟瞰图
plt.subplot(1, 2, 2)
plt.title("Bird's Eye View (IPM)")
plt.imshow(cv2.cvtColor(bev_img, cv2.COLOR_BGR2RGB))
# 可以在这里看到,车道线变平行了,路标间隔变均匀了
plt.tight_layout()
plt.show()