1. 生成代码
python
"""
InternNav项目详细架构图生成器
基于实际代码生成详细的模型架构、训练流程和推理流程图
包含每一层的shape描述和详细的数据流
"""
from graphviz import Digraph
import os
# 配色方案
COLORS = {
'input': '#E3F2FD',
'input_line': '#1976D2',
's2_vlm': '#FCE4EC',
's2_vlm_line': '#C2185B',
's1_navdp': '#FFF3E0',
's1_navdp_line': '#F57C00',
'encoder': '#E8F5E9',
'encoder_line': '#388E3C',
'decoder': '#F3E5F5',
'decoder_line': '#7B1FA2',
'loss': '#FFEBEE',
'loss_line': '#D32F2F',
'output': '#E0F7FA',
'output_line': '#00ACC1',
'tensor': '#FFF9C4',
'tensor_line': '#FBC02D',
'data': '#F3E5F5',
'data_line': '#9C27B0',
'process': '#E8EAF6',
'process_line': '#3F51B5',
}
FONT = 'SimHei' # 使用中文字体(黑体)
def create_internvlan1_model_architecture():
"""生成InternVLA-N1详细模型架构图"""
dot = Digraph('InternVLA_N1_Model_Architecture', comment='InternVLA-N1双系统导航模型详细架构')
dot.attr(rankdir='TB', size='32,48', dpi='300',
nodesep='0.8', ranksep='1.0', bgcolor='white',
fontname=FONT, fontsize='12')
dot.attr('node', shape='box', style='rounded,filled', penwidth='2',
fontname=FONT, fontsize='10')
dot.attr('edge', fontname=FONT, fontsize='9', penwidth='1.5')
# ============================================================
# 输入层
# ============================================================
with dot.subgraph(name='cluster_input') as c:
c.attr(label='📥 输入层', style='filled',
fillcolor=COLORS['input'], color=COLORS['input_line'],
penwidth='3', fontsize='18', fontname=FONT)
c.node('RGB_History',
'📷 RGB图像历史\\n'
'━━━━━━━━━━━━━━━━━━\\n'
'当前帧 + 历史帧\\n'
'List[PIL.Image]\\n'
'Resize: (width, height)\\n'
'━━━━━━━━━━━━━━━━━━\\n'
'num_history = 8\\n'
'total_frames = num_history + 1',
fillcolor='white', shape='folder')
c.node('Depth',
'🌊 深度图\\n'
'━━━━━━━━━━━━━━━━━━\\n'
'Depth Map\\n'
'Shape: [H, W, 1]\\n'
'Range: 0.1-5.0m',
fillcolor='white', shape='folder')
c.node('Instruction',
'📝 导航指令\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'"Go to the kitchen and..."\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'类型: str',
fillcolor='white', shape='note')
c.node('Pose',
'🧭 位姿信息\\n'
'━━━━━━━━━━━━━━━━━━\\n'
'Position + Rotation\\n'
'Shape: [7] (xyz + quat)',
fillcolor='white')
# ============================================================
# System 2: Qwen2.5-VL 高级规划器
# ============================================================
with dot.subgraph(name='cluster_s2') as c:
c.attr(label='🧠 System 2: Qwen2.5-VL 高级规划器 (S2)',
style='filled', fillcolor=COLORS['s2_vlm'],
color=COLORS['s2_vlm_line'], penwidth='3', fontsize='18')
# Processor
c.node('Processor',
'⚙️ AutoProcessor\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'图像预处理:\\n'
' • pixel_values: [B, N_img, C, H, W]\\n'
' • image_grid_thw: [B, N_img, 3]\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'文本分词:\\n'
' • input_ids: [B, seq_len]\\n'
' • attention_mask: [B, seq_len]',
fillcolor='white')
# Vision Tower
c.node('Vision_Tower',
'🖼️ Qwen2.5-VL Vision Tower\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'输入: pixel_values\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'Patch Embed + ViT Blocks\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'输出: image_embeds\\n'
' [B, N_img_tokens, hidden_dim]',
fillcolor='#FFEBEE', shape='component')
# Text Embedding
c.node('Text_Embed',
'📝 Text Embeddings\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'输入: input_ids [B, N_text]\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'Embedding(vocab_size, 2560)',
fillcolor='#FFEBEE', shape='component')
# Transformer
c.node('QwenVL_Transformer',
'🔄 Qwen2.5-VL Transformer\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'Config: Qwen/Qwen2.5-VL-7B-Instruct\\n'
'Hidden Size: 2560\\n'
'Num Layers: 28\\n'
'Attention Heads: 20\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'Flash Attention 2\\n'
'RoPE Position Encoding\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'输入: Concat(Image + Text) Embeds\\n'
'输出: last_hidden_state [B, seq_len, 2560]',
fillcolor='#FFE0E6', shape='box3d', penwidth='3')
# LM Head (for text generation)
c.node('LM_Head',
'💬 Language Model Head\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'Linear(2560 -> vocab_size)\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'生成文本输出:\\n'
' • 像素坐标: "(x, y)"\\n'
' • 或离散动作: "↑←→↓STOP"',
fillcolor=COLORS['tensor'], color=COLORS['tensor_line'])
# Latent Queries
c.node('Latent_Queries',
'🎯 Latent Query Generation\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'Step 1: 在input_ids末尾添加\\n'
' TRAJ_START_TOKEN (151665)\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'Step 2: 插入N个TRAJ_TOKEN\\n'
' learnable latent_queries\\n'
' [1, n_query, 2560]\\n'
' 默认 n_query = 100\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'Step 3: 通过Transformer\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'输出: traj_latents\\n'
' [B, 100, 2560]',
fillcolor=COLORS['tensor'], color=COLORS['tensor_line'],
shape='parallelogram')
# ============================================================
# System 1: NavDP 低级运动控制器
# ============================================================
with dot.subgraph(name='cluster_s1') as c:
c.attr(label='🤖 System 1: NavDP 扩散策略导航 (S1)',
style='filled', fillcolor=COLORS['s1_navdp'],
color=COLORS['s1_navdp_line'], penwidth='3', fontsize='18')
# NavDP输入准备
c.node('NavDP_Input_Prep',
'📦 NavDP输入准备\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'RGB-D Images (当前观测)\\n'
'Latent from S2: [B, 100, 2560]\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'异步模式额外输入:\\n'
' • 像素目标RGB图像\\n'
' • 像素目标深度图',
fillcolor='white')
# RGBD Backbone
c.node('RGBD_Backbone',
'🔍 RGBD Encoder Backbone\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'基础模型: Depth-Anything-V2-Small\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'RGB分支:\\n'
' • Input: [B, T, H, W, 3]\\n'
' • ViT Encoder\\n'
' • Output: [B, T*256, 384]\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'Depth分支:\\n'
' • Input: [B, T, H, W, 1]\\n'
' • Replicate to 3 channels\\n'
' • ViT Encoder\\n'
' • Output: [B, T*256, 384]\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'Fusion:\\n'
' • Concat: [B, 2*T*256, 384]\\n'
' • + Learnable Pos Encoding\\n'
' • TransformerDecoder(2 layers)\\n'
' • Query: [B, memory_size*16, 384]\\n'
' • Project to token_dim=512\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'Output: rgbd_embed [B, M*16, 512]',
fillcolor='#FFE0B2', shape='component', penwidth='3')
# Goal Encoders
c.node('Goal_Encoders',
'🎯 多模态目标编码器\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'1. Point Goal Encoder:\\n'
' Linear(3 -> 512)\\n'
' Input: [B, 3] (相对坐标)\\n'
' Output: [B, 1, 512]\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'2. Image Goal Encoder:\\n'
' DepthAnything (6 channels)\\n'
' Input: [B, H, W, 6]\\n'
' Output: [B, 1, 512]\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'3. Pixel Goal Encoder:\\n'
' DepthAnything (7 channels)\\n'
' Input: [B, H, W, 7]\\n'
' Output: [B, 1, 512]',
fillcolor='#FFE0B2', shape='component')
# Diffusion Process
c.node('Diffusion_Process',
'🌊 扩散去噪过程 (DDPM)\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'Scheduler: DDPMScheduler\\n'
' • num_train_timesteps: 10\\n'
' • beta_schedule: squaredcos_cap_v2\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'推理过程 (采样K=32条轨迹):\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'1. 初始化噪声:\\n'
' noisy_action ~ N(0,I)\\n'
' Shape: [K*B, predict_size, 3]\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'2. 迭代去噪 (T=10 steps):\\n'
' for t in [9,8,...,1,0]:\\n'
' • Embed: action_embed = Linear(3->512)\\n'
' • Time Embed: time_emb = SinPosEmb(t)\\n'
' • Condition: [time, goal*3, rgbd]\\n'
' • Transformer Decode:\\n'
' - Input: action_embed + pos_embed\\n'
' - Memory: cond_embed + cond_pos_embed\\n'
' - Causal Mask (predict_size)\\n'
' • Predict noise_pred\\n'
' • Update: action = scheduler.step()\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'输出: denoised_actions [K*B, P, 3]',
fillcolor='#E1BEE7', shape='box3d', penwidth='3')
# Transformer Decoder
c.node('Action_Decoder',
'🎬 Action Transformer Decoder\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'Architecture:\\n'
' • Layers: temporal_depth (6)\\n'
' • Hidden dim: 512\\n'
' • Heads: 8\\n'
' • FFN dim: 2048\\n'
' • Activation: GELU\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'Input Embedding:\\n'
' action_embed + output_pos_embed\\n'
'Memory (Condition):\\n'
' [time, goal, goal, goal, rgbd]\\n'
' + cond_pos_embed\\n'
'Causal Mask: 上三角\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'Output: [B, predict_size, 512]\\n'
'Action Head: Linear(512 -> 3)',
fillcolor='#FFE0B2')
# Critic Network
c.node('Critic_Network',
'⚖️ Critic Network (轨迹评估)\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'输入: 预测的K条轨迹\\n'
'Condition: [0, 0, 0, 0, rgbd]\\n'
'Memory Mask: mask前4个goal位置\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'Transformer Decoder\\n'
'+ LayerNorm\\n'
'+ Mean Pooling\\n'
'+ Linear(512 -> 1)\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'Output: critic_values [K*B]\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'轨迹选择:\\n'
' • Top-8 positive (最高分)\\n'
' • Top-8 negative (最低分)',
fillcolor='#C5CAE9', shape='component')
# Trajectory Generation
c.node('Traj_Generation',
'📈 轨迹生成与选择\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'1. 累积和生成轨迹:\\n'
' trajectory = cumsum(actions/4.0)\\n'
' Shape: [K*B, predict_size, 3]\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'2. 根据Critic选择最佳轨迹\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'3. 转换为离散动作:\\n'
' • 连续模式: traj_to_actions()\\n'
' • 离散模式: chunk_token()\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'Output: action_list (4-8步)',
fillcolor=COLORS['tensor'], color=COLORS['tensor_line'])
# ============================================================
# 输出
# ============================================================
with dot.subgraph(name='cluster_output') as c:
c.attr(label='📤 最终输出', style='filled',
fillcolor=COLORS['output'], color=COLORS['output_line'],
penwidth='3', fontsize='18')
c.node('S2_Output',
'🎯 S2输出\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'情况1: 像素目标\\n'
' • pixel_coord: [2]\\n'
' • traj_latents: [B, 100, 2560]\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'情况2: 离散动作\\n'
' • actions: [↑,←,→,STOP]',
fillcolor='white', shape='note')
c.node('S1_Output',
'🤖 S1输出\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'低级运动控制指令\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'同步模式: 4步动作\\n'
'异步模式: 8步动作\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'action_indices: [0,1,2,3,5]\\n'
'0=STOP, 1=↑, 2=←, 3=→, 5=↓',
fillcolor='white', shape='note')
c.node('Final_Action',
'✅ 执行动作\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'发送给机器人执行\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'可能包含:\\n'
' • 线速度\\n'
' • 角速度\\n'
' • 停止信号',
fillcolor=COLORS['output'], color=COLORS['output_line'],
shape='doubleoctagon', penwidth='3')
# ============================================================
# Edges (数据流)
# ============================================================
# 输入到S2
dot.edge('RGB_History', 'Processor', color=COLORS['input_line'])
dot.edge('Instruction', 'Processor', color=COLORS['input_line'])
dot.edge('Pose', 'Processor', style='dashed')
dot.edge('Processor', 'Vision_Tower', label='pixel_values')
dot.edge('Processor', 'Text_Embed', label='input_ids')
dot.edge('Vision_Tower', 'QwenVL_Transformer', label='image_embeds')
dot.edge('Text_Embed', 'QwenVL_Transformer', label='text_embeds')
dot.edge('QwenVL_Transformer', 'LM_Head', label='hidden_states', penwidth='2')
dot.edge('LM_Head', 'S2_Output', label='text output')
dot.edge('QwenVL_Transformer', 'Latent_Queries',
label='generate_latents()', style='dashed', color=COLORS['s2_vlm_line'])
# S2 to S1
dot.edge('Latent_Queries', 'NavDP_Input_Prep',
label='traj_latents\n[B,100,2560]',
penwidth='3', color=COLORS['s1_navdp_line'])
dot.edge('RGB_History', 'NavDP_Input_Prep', style='dashed')
dot.edge('Depth', 'NavDP_Input_Prep', style='dashed')
# S1 processing
dot.edge('NavDP_Input_Prep', 'RGBD_Backbone', label='RGB-D')
dot.edge('NavDP_Input_Prep', 'Goal_Encoders', label='latent/goal', style='dashed')
dot.edge('RGBD_Backbone', 'Diffusion_Process', label='rgbd_embed\n[B,M*16,512]')
dot.edge('Goal_Encoders', 'Diffusion_Process', label='goal_embed\n[B,1,512]')
dot.edge('Diffusion_Process', 'Action_Decoder',
label='iterative\ndenoising', style='dashed')
dot.edge('Action_Decoder', 'Diffusion_Process',
label='noise_pred', style='dashed')
dot.edge('Diffusion_Process', 'Critic_Network', label='K trajectories')
dot.edge('Critic_Network', 'Traj_Generation', label='critic scores')
dot.edge('Diffusion_Process', 'Traj_Generation', label='actions')
# Output
dot.edge('Traj_Generation', 'S1_Output', label='action_list')
dot.edge('S1_Output', 'Final_Action', penwidth='3')
dot.edge('S2_Output', 'Final_Action', label='if no latent', style='dashed')
return dot
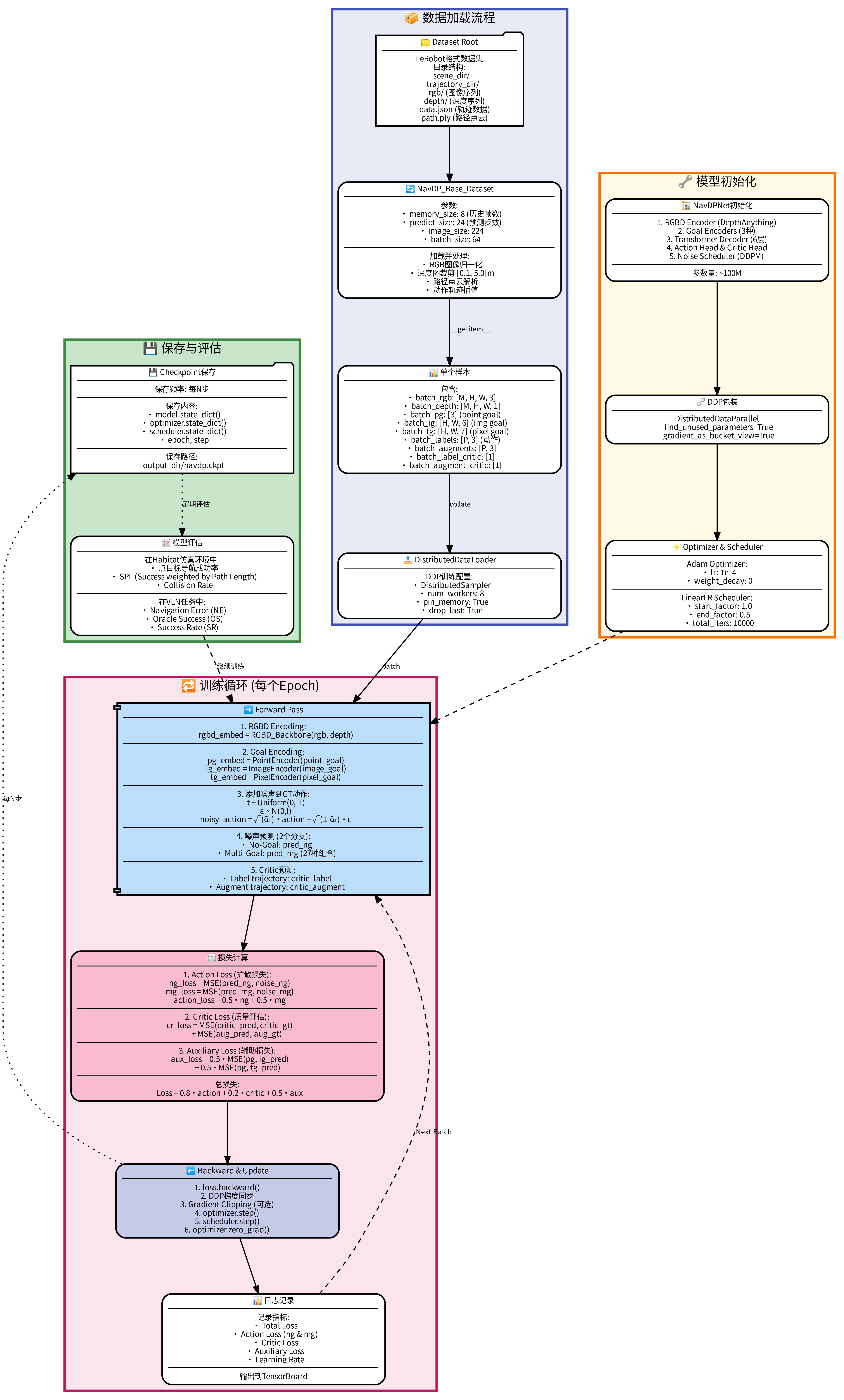
def create_training_flow():
"""生成NavDP训练流程图"""
dot = Digraph('NavDP_Training_Flow', comment='NavDP训练流程详细版')
dot.attr(rankdir='TB', size='24,32', dpi='300',
nodesep='0.8', ranksep='1.0', bgcolor='white',
fontname=FONT, fontsize='12')
dot.attr('node', shape='box', style='rounded,filled', penwidth='2',
fontname=FONT, fontsize='10')
dot.attr('edge', fontname=FONT, fontsize='9', penwidth='1.5')
# ============================================================
# 数据加载
# ============================================================
with dot.subgraph(name='cluster_data') as c:
c.attr(label='📦 数据加载流程', style='filled',
fillcolor='#E8EAF6', color='#3F51B5', penwidth='3', fontsize='16')
c.node('Dataset_Root',
'📁 Dataset Root\\n'
'━━━━━━━━━━━━━━━━━━\\n'
'LeRobot格式数据集\\n'
'目录结构:\\n'
' scene_dir/\\n'
' trajectory_dir/\\n'
' rgb/ (图像序列)\\n'
' depth/ (深度序列)\\n'
' data.json (轨迹数据)\\n'
' path.ply (路径点云)',
fillcolor='white', shape='folder')
c.node('NavDP_Dataset',
'🔄 NavDP_Base_Dataset\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'参数:\\n'
' • memory_size: 8 (历史帧数)\\n'
' • predict_size: 24 (预测步数)\\n'
' • image_size: 224\\n'
' • batch_size: 64\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'加载并处理:\\n'
' • RGB图像归一化\\n'
' • 深度图裁剪 [0.1, 5.0]m\\n'
' • 路径点云解析\\n'
' • 动作轨迹插值',
fillcolor='white')
c.node('Data_Sample',
'📊 单个样本\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'包含:\\n'
' • batch_rgb: [M, H, W, 3]\\n'
' • batch_depth: [M, H, W, 1]\\n'
' • batch_pg: [3] (point goal)\\n'
' • batch_ig: [H, W, 6] (img goal)\\n'
' • batch_tg: [H, W, 7] (pixel goal)\\n'
' • batch_labels: [P, 3] (动作)\\n'
' • batch_augments: [P, 3]\\n'
' • batch_label_critic: [1]\\n'
' • batch_augment_critic: [1]',
fillcolor='white')
c.node('DataLoader',
'📤 DistributedDataLoader\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'DDP训练配置:\\n'
' • DistributedSampler\\n'
' • num_workers: 8\\n'
' • pin_memory: True\\n'
' • drop_last: True',
fillcolor='white')
# ============================================================
# 模型初始化
# ============================================================
with dot.subgraph(name='cluster_init') as c:
c.attr(label='🔧 模型初始化', style='filled',
fillcolor='#FFF9E6', color='#FF6F00', penwidth='3', fontsize='16')
c.node('Init_Model',
'🏗️ NavDPNet初始化\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'1. RGBD Encoder (DepthAnything)\\n'
'2. Goal Encoders (3种)\\n'
'3. Transformer Decoder (6层)\\n'
'4. Action Head & Critic Head\\n'
'5. Noise Scheduler (DDPM)\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'参数量: ~100M',
fillcolor='white')
c.node('DDP_Wrap',
'🔗 DDP包装\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'DistributedDataParallel\\n'
' find_unused_parameters=True\\n'
' gradient_as_bucket_view=True',
fillcolor='white')
c.node('Optimizer',
'⚡ Optimizer & Scheduler\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'Adam Optimizer:\\n'
' • lr: 1e-4\\n'
' • weight_decay: 0\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'LinearLR Scheduler:\\n'
' • start_factor: 1.0\\n'
' • end_factor: 0.5\\n'
' • total_iters: 10000',
fillcolor='white')
# ============================================================
# 训练循环
# ============================================================
with dot.subgraph(name='cluster_train') as c:
c.attr(label='🔁 训练循环 (每个Epoch)', style='filled',
fillcolor='#FCE4EC', color='#C2185B', penwidth='3', fontsize='16')
c.node('Forward_Pass',
'➡️ Forward Pass\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'1. RGBD Encoding:\\n'
' rgbd_embed = RGBD_Backbone(rgb, depth)\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'2. Goal Encoding:\\n'
' pg_embed = PointEncoder(point_goal)\\n'
' ig_embed = ImageEncoder(image_goal)\\n'
' tg_embed = PixelEncoder(pixel_goal)\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'3. 添加噪声到GT动作:\\n'
' t ~ Uniform(0, T)\\n'
' ε ~ N(0,I)\\n'
' noisy_action = √(ᾱₜ)·action + √(1-ᾱₜ)·ε\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'4. 噪声预测 (2个分支):\\n'
' • No-Goal: pred_ng\\n'
' • Multi-Goal: pred_mg (27种组合)\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'5. Critic预测:\\n'
' • Label trajectory: critic_label\\n'
' • Augment trajectory: critic_augment',
fillcolor='#BBDEFB', shape='component', penwidth='2')
c.node('Loss_Computation',
'📉 损失计算\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'1. Action Loss (扩散损失):\\n'
' ng_loss = MSE(pred_ng, noise_ng)\\n'
' mg_loss = MSE(pred_mg, noise_mg)\\n'
' action_loss = 0.5·ng + 0.5·mg\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'2. Critic Loss (质量评估):\\n'
' cr_loss = MSE(critic_pred, critic_gt)\\n'
' + MSE(aug_pred, aug_gt)\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'3. Auxiliary Loss (辅助损失):\\n'
' aux_loss = 0.5·MSE(pg, ig_pred)\\n'
' + 0.5·MSE(pg, tg_pred)\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'总损失:\\n'
' Loss = 0.8·action + 0.2·critic + 0.5·aux',
fillcolor='#F8BBD0', penwidth='2')
c.node('Backward',
'⬅️ Backward & Update\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'1. loss.backward()\\n'
'2. DDP梯度同步\\n'
'3. Gradient Clipping (可选)\\n'
'4. optimizer.step()\\n'
'5. scheduler.step()\\n'
'6. optimizer.zero_grad()',
fillcolor='#C5CAE9')
c.node('Logging',
'📊 日志记录\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'记录指标:\\n'
' • Total Loss\\n'
' • Action Loss (ng & mg)\\n'
' • Critic Loss\\n'
' • Auxiliary Loss\\n'
' • Learning Rate\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'输出到TensorBoard',
fillcolor='white')
# ============================================================
# 保存与评估
# ============================================================
with dot.subgraph(name='cluster_save') as c:
c.attr(label='💾 保存与评估', style='filled',
fillcolor='#C8E6C9', color='#388E3C', penwidth='3', fontsize='16')
c.node('Checkpoint',
'💾 Checkpoint保存\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'保存频率: 每N步\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'保存内容:\\n'
' • model.state_dict()\\n'
' • optimizer.state_dict()\\n'
' • scheduler.state_dict()\\n'
' • epoch, step\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'保存路径:\\n'
' output_dir/navdp.ckpt',
fillcolor='white', shape='folder')
c.node('Evaluation',
'📈 模型评估\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'在Habitat仿真环境中:\\n'
' • 点目标导航成功率\\n'
' • SPL (Success weighted by Path Length)\\n'
' • Collision Rate\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'在VLN任务中:\\n'
' • Navigation Error (NE)\\n'
' • Oracle Success (OS)\\n'
' • Success Rate (SR)',
fillcolor='white')
# Edges
dot.edge('Dataset_Root', 'NavDP_Dataset')
dot.edge('NavDP_Dataset', 'Data_Sample', label='__getitem__')
dot.edge('Data_Sample', 'DataLoader', label='collate')
dot.edge('DataLoader', 'Forward_Pass', label='batch')
dot.edge('Init_Model', 'DDP_Wrap')
dot.edge('DDP_Wrap', 'Optimizer')
dot.edge('Optimizer', 'Forward_Pass', style='dashed')
dot.edge('Forward_Pass', 'Loss_Computation')
dot.edge('Loss_Computation', 'Backward')
dot.edge('Backward', 'Logging')
dot.edge('Logging', 'Forward_Pass', label='Next Batch', style='dashed')
dot.edge('Backward', 'Checkpoint', label='每N步', style='dotted')
dot.edge('Checkpoint', 'Evaluation', label='定期评估', style='dotted')
dot.edge('Evaluation', 'Forward_Pass', label='继续训练', style='dashed')
return dot
def create_inference_flow():
"""生成InternVLA-N1推理流程图"""
dot = Digraph('InternVLA_N1_Inference_Flow', comment='InternVLA-N1推理流程(双系统异步协作)')
dot.attr(rankdir='TB', size='28,40', dpi='300',
nodesep='0.8', ranksep='1.2', bgcolor='white',
fontname=FONT, fontsize='12')
dot.attr('node', shape='box', style='rounded,filled', penwidth='2',
fontname=FONT, fontsize='10')
dot.attr('edge', fontname=FONT, fontsize='9', penwidth='1.5')
# ============================================================
# 初始化
# ============================================================
with dot.subgraph(name='cluster_init') as c:
c.attr(label='🚀 系统初始化', style='filled',
fillcolor='#E8EAF6', color='#3F51B5', penwidth='3', fontsize='16')
c.node('Agent_Init',
'🤖 InternVLAN1Agent初始化\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'1. 加载InternVLA-N1模型\\n'
' • S2: Qwen2.5-VL-7B\\n'
' • S1: NavDP\\n'
'2. 设置推理模式:\\n'
' • sync (同步)\\n'
' • async (异步)\\n'
'3. 相机参数初始化\\n'
'4. 创建线程锁',
fillcolor='white')
c.node('Thread_Start',
'🧵 启动S2推理线程\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'def s2_thread_func():\\n'
' while True:\\n'
' if s2_input.should_infer:\\n'
' 执行S2推理\\n'
' 更新s2_output\\n'
' else:\\n'
' sleep(0.5)\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'后台持续运行',
fillcolor='#E1BEE7')
# ============================================================
# 主循环 - Episode开始
# ============================================================
with dot.subgraph(name='cluster_episode') as c:
c.attr(label='🔄 Episode主循环', style='filled',
fillcolor='#FCE4EC', color='#C2185B', penwidth='3', fontsize='16')
c.node('Episode_Start',
'🎬 Episode开始\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'接收任务:\\n'
' • instruction: 导航指令\\n'
' • start_pose: 初始位置\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'agent.reset()\\n'
' • 清空历史\\n'
' • 重置状态\\n'
' • episode_step = 0',
fillcolor='white', shape='hexagon', penwidth='3')
c.node('Obs_Capture',
'📸 获取观测\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'obs = env.get_observation()\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'包含:\\n'
' • rgb: [H, W, 3]\\n'
' • depth: [H, W, 1]\\n'
' • pose: [7] (xyz+quat)\\n'
' • instruction: str',
fillcolor='white')
# ============================================================
# S2推理分支(异步线程)
# ============================================================
with dot.subgraph(name='cluster_s2') as c:
c.attr(label='🧠 S2推理分支(异步线程)', style='filled',
fillcolor='#FFF3E0', color='#F57C00', penwidth='3', fontsize='16')
c.node('S2_Trigger',
'🔔 触发S2推理\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'条件检查:\\n'
' 1. dual_forward_step==0 OR\\n'
' 2. dual_forward_step>=sys2_max_step\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'if 触发:\\n'
' with s2_input_lock:\\n'
' s2_input.rgb = rgb\\n'
' s2_input.depth = depth\\n'
' s2_input.instruction = inst\\n'
' s2_input.should_infer = True',
fillcolor='white', shape='diamond')
c.node('S2_Infer',
'🔮 S2推理 (Qwen2.5-VL)\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'Step 1: 图像历史准备\\n'
' • 当前帧 + num_history帧\\n'
' • 均匀采样历史\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'Step 2: 构建Prompt\\n'
' "你是导航助手...\\n'
' 任务: <instruction>\\n'
' 历史观测: <images>\\n'
' 当前观测: <image>"\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'Step 3: VLM推理\\n'
' output_ids = model.generate()\\n'
' llm_output = decode(output_ids)\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'Step 4: 解析输出\\n'
' if 包含数字:\\n'
' → 像素坐标 "(x,y)"\\n'
' → 生成latent特征\\n'
' else:\\n'
' → 离散动作 "↑←→STOP"',
fillcolor='#FFCCBC', shape='component', penwidth='3')
c.node('Latent_Gen',
'✨ 生成Latent特征\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'generate_latents():\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'1. 添加TRAJ_START_TOKEN\\n'
'2. 插入100个TRAJ_TOKEN\\n'
'3. 通过Transformer\\n'
'4. 提取最后100个token\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'Output: [1, 100, 2560]',
fillcolor='#FFCCBC')
c.node('S2_Output_Update',
'📝 更新S2输出\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'with s2_output_lock:\\n'
' s2_output.output_pixel = pixel\\n'
' s2_output.output_action = actions\\n'
' s2_output.output_latent = latent\\n'
' s2_output.idx = current_step',
fillcolor='white')
# ============================================================
# S1推理分支(主线程)
# ============================================================
with dot.subgraph(name='cluster_s1') as c:
c.attr(label='🤖 S1推理分支(主线程)', style='filled',
fillcolor='#E8F5E9', color='#388E3C', penwidth='3', fontsize='16')
c.node('Check_S2_Output',
'🔍 检查S2输出\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'with s2_output_lock:\\n'
' if s2_output.output_latent:\\n'
' 使用S1\\n'
' elif s2_output.output_action:\\n'
' 直接返回S2动作\\n'
' else:\\n'
' 等待S2完成',
fillcolor='white', shape='diamond')
c.node('S1_Prepare',
'📦 S1输入准备\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'获取当前观测:\\n'
' • rgb (用于RGBD编码)\\n'
' • depth\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'获取S2 latent:\\n'
' traj_latents = s2_output.latent\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'异步模式额外输入:\\n'
' • pixel_goal_rgb\\n'
' • pixel_goal_depth',
fillcolor='white')
c.node('S1_Infer',
'🎯 S1推理 (NavDP)\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'generate_traj(traj_latents, rgb, depth)\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'Step 1: RGBD编码\\n'
' rgbd_embed = RGBD_Backbone(rgb, depth)\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'Step 2: 扩散去噪 (采样32条轨迹)\\n'
' noisy ~ N(0,I) [32, 24, 3]\\n'
' for t in [9..0]:\\n'
' noise_pred = Decoder(\\n'
' noisy, t, latent, rgbd)\\n'
' noisy = scheduler.step()\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'Step 3: Critic评分\\n'
' critic_scores = Critic(trajs)\\n'
' best_traj = trajs[argmax(scores)]\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'Step 4: 转换为动作序列\\n'
' actions = traj_to_actions(best_traj)\\n'
' 返回前4-8步',
fillcolor='#C8E6C9', shape='component', penwidth='3')
c.node('Action_Select',
'🎮 动作选择\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'action_list = s1_output.idx\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'取第一个动作执行:\\n'
'action = action_list[0]\\n'
'action_list = action_list[1:]\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'动作映射:\\n'
' 0: STOP\\n'
' 1: MOVE_FORWARD\\n'
' 2: TURN_LEFT\\n'
' 3: TURN_RIGHT\\n'
' 5: LOOK_DOWN',
fillcolor='white')
# ============================================================
# 执行与循环
# ============================================================
with dot.subgraph(name='cluster_exec') as c:
c.attr(label='⚡ 动作执行与状态更新', style='filled',
fillcolor='#E0F7FA', color='#00ACC1', penwidth='3', fontsize='16')
c.node('Execute_Action',
'🏃 执行动作\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'obs = env.step(action)\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'机器人执行物理动作\\n'
'获取新的观测',
fillcolor='white', shape='doubleoctagon', penwidth='3')
c.node('Update_State',
'🔄 状态更新\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'episode_step += 1\\n'
'dual_forward_step += 1\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'更新历史:\\n'
' rgb_list.append(rgb)\\n'
' depth_list.append(depth)\\n'
' pose_list.append(pose)',
fillcolor='white')
c.node('Check_Done',
'✅ 检查终止条件\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'满足以下任一条件:\\n'
' 1. action == STOP\\n'
' 2. 到达目标位置\\n'
' 3. 超过最大步数\\n'
' 4. 碰撞次数过多\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'if done:\\n'
' 计算指标\\n'
' 保存日志\\n'
'else:\\n'
' 继续循环',
fillcolor='white', shape='diamond')
# ============================================================
# Episode结束
# ============================================================
with dot.subgraph(name='cluster_end') as c:
c.attr(label='🏁 Episode结束', style='filled',
fillcolor='#C8E6C9', color='#388E3C', penwidth='3', fontsize='16')
c.node('Metrics',
'📊 计算评估指标\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'VLN-CE指标:\\n'
' • Navigation Error (NE)\\n'
' • Success Rate (SR)\\n'
' • Oracle Success (OS)\\n'
' • SPL (Success weighted by PL)\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'VLN-PE指标:\\n'
' • Path Length\\n'
' • Steps\\n'
' • Collision Count',
fillcolor='white')
c.node('Next_Episode',
'🔁 下一个Episode\\n'
'━━━━━━━━━━━━━━━━━━━━━━━━━━━━\\n'
'if 还有任务:\\n'
' agent.reset()\\n'
' 开始新Episode\\n'
'else:\\n'
' 汇总统计\\n'
' 保存结果\\n'
' 结束评估',
fillcolor='white', shape='hexagon')
# ============================================================
# Edges(数据流)
# ============================================================
# 初始化流程
dot.edge('Agent_Init', 'Thread_Start', penwidth='2')
dot.edge('Thread_Start', 'Episode_Start', style='dashed', label='后台运行')
# Episode主流程
dot.edge('Episode_Start', 'Obs_Capture', penwidth='2')
dot.edge('Obs_Capture', 'S2_Trigger', penwidth='2')
# S2分支(异步)
dot.edge('S2_Trigger', 'S2_Infer', label='if 触发', color=COLORS['s2_vlm_line'])
dot.edge('S2_Infer', 'Latent_Gen', label='if 像素目标', color=COLORS['s2_vlm_line'])
dot.edge('Latent_Gen', 'S2_Output_Update', color=COLORS['s2_vlm_line'])
dot.edge('S2_Infer', 'S2_Output_Update', label='if 离散动作',
style='dashed', color=COLORS['s2_vlm_line'])
# S1分支(主线程)
dot.edge('S2_Trigger', 'Check_S2_Output', label='主线程继续')
dot.edge('S2_Output_Update', 'Check_S2_Output',
label='异步更新', style='dotted', color=COLORS['s2_vlm_line'])
dot.edge('Check_S2_Output', 'S1_Prepare', label='有latent',
color=COLORS['s1_navdp_line'])
dot.edge('S1_Prepare', 'S1_Infer', color=COLORS['s1_navdp_line'], penwidth='2')
dot.edge('S1_Infer', 'Action_Select', color=COLORS['s1_navdp_line'])
dot.edge('Check_S2_Output', 'Action_Select',
label='有S2动作', style='dashed')
# 执行流程
dot.edge('Action_Select', 'Execute_Action', penwidth='3')
dot.edge('Execute_Action', 'Update_State', penwidth='2')
dot.edge('Update_State', 'Check_Done', penwidth='2')
# 循环or结束
dot.edge('Check_Done', 'Obs_Capture',
label='继续', style='dashed', color='#666')
dot.edge('Check_Done', 'Metrics', label='done', penwidth='2')
dot.edge('Metrics', 'Next_Episode')
dot.edge('Next_Episode', 'Episode_Start',
label='下一个Episode', style='dotted')
return dot
def main():
output_dir = './docs'
os.makedirs(output_dir, exist_ok=True)
print("="*60)
print("开始生成InternNav项目架构图...")
print("="*60)
try:
# 1. 生成模型架构图
print("\n📐 生成模型架构图...")
model_dot = create_internvlan1_model_architecture()
model_path = f'{output_dir}/internvla_n1_model_architecture'
model_dot.render(model_path, format='png', cleanup=True)
print(f"✅ 模型架构图: {model_path}.png")
# 2. 生成训练流程图
print("\n📚 生成训练流程图...")
train_dot = create_training_flow()
train_path = f'{output_dir}/navdp_training_flow'
train_dot.render(train_path, format='png', cleanup=True)
print(f"✅ 训练流程图: {train_path}.png")
# 3. 生成推理流程图
print("\n🚀 生成推理流程图...")
infer_dot = create_inference_flow()
infer_path = f'{output_dir}/internvla_n1_inference_flow'
infer_dot.render(infer_path, format='png', cleanup=True)
print(f"✅ 推理流程图: {infer_path}.png")
print("\n" + "="*60)
print("🎉 所有架构图生成完成!")
print("="*60)
print(f"\n📁 输出目录: {os.path.abspath(output_dir)}/")
print("\n生成的文件:")
print(f" 1. internvla_n1_model_architecture.png - InternVLA-N1详细模型架构")
print(f" 2. navdp_training_flow.png - NavDP训练流程")
print(f" 3. internvla_n1_inference_flow.png - 双系统异步推理流程")
print("\n" + "="*60)
except Exception as e:
print(f"\n❌ 错误: {e}")
import traceback
traceback.print_exc()
if __name__ == '__main__':
main()2. 模型结构图
太大了,没法上传,请自行用上面的代码生成
3. 训练流程图
4.推理流程图
太大了,没法上传,请自行用上面的代码生成