一. 算法效果展示
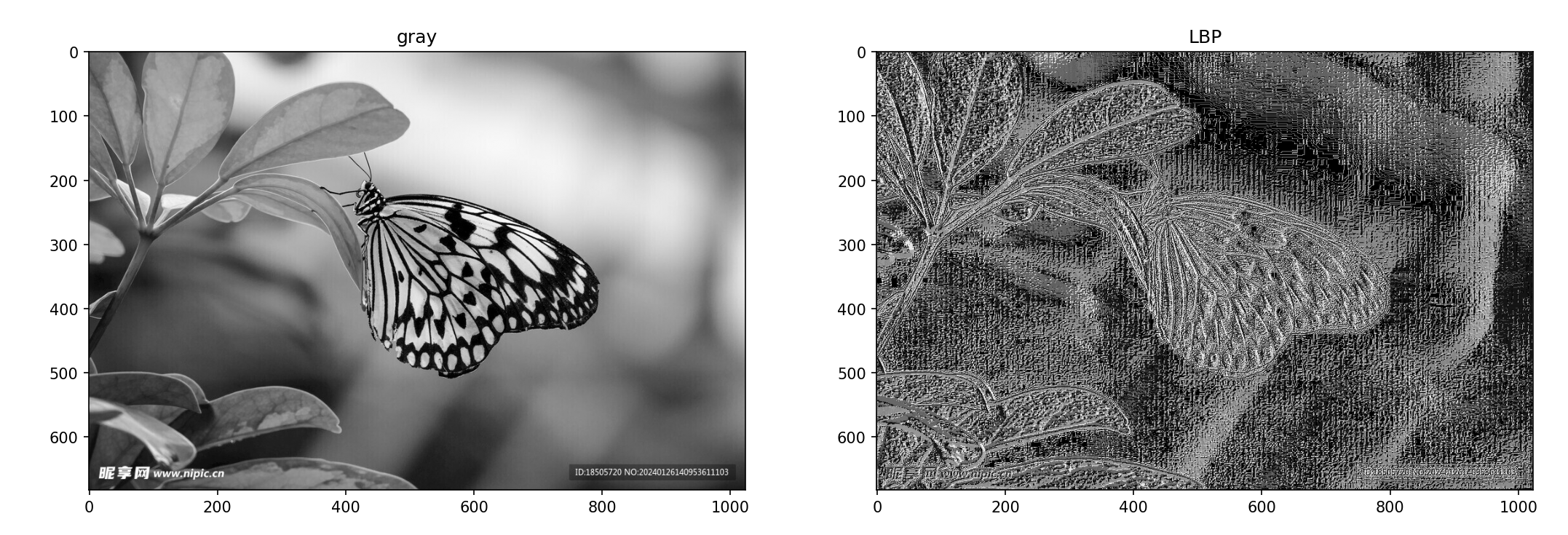
二. 算法简介
LBP(Local Binary Pattern,局部二值模式)是经典的局部纹理特征提取算法,核心逻辑是:对图像中每个像素,将其与周围邻域像素的灰度值比较(邻域像素>中心像素取1,否则取0),生成8位(3x3邻域)二进制编码,再将编码转换为十进制数作为该像素的"LBP值"。最终通过统计全图或局部区域的LBP值直方图,得到图像的纹理特征。
三. 算法作用与应用场景
LBP的核心作用是将图像的局部纹理信息转化为可量化的特征,为后续的分类、识别、检索等任务提供基础。具体应用场景包括:
- 纹理分类与材质识别:提取木材、布料、皮革等材质的LBP特征,实现不同材质的自动分类(如工业生产中的"材质质检"环节)。
- 人脸识别与面部分析:结合LBP提取面部局部纹理(如眼角皱纹、鼻翼毛孔),作为人脸识别的核心特征(OpenCV中的LBPH人脸识别器即基于此)。
- 医学图像分析:在CT、MRI图像中,通过LBP提取肿瘤或病变区域的纹理特征(如密度分布不均的纹理),辅助医生判断病灶性质。
- 图像检索与相似匹配:将LBP特征作为图像的"纹理指纹",实现"找相似纹理图像"的功能(如电商平台中"同款布料搜索")。
- 视频监控异常检测:通过LBP提取监控画面中的纹理变化(如地面纹理被遮挡、墙面纹理异常),检测物品遗留、非法涂鸦等异常事件。
- 文档图像分析:提取纸张纹理、文字边缘的LBP特征,用于手写体识别或文档真伪鉴别(如护照、发票的纹理防伪)。
四. 算法优缺点
| 优点 | 缺点 |
|---|---|
| 计算复杂度极低(仅需灰度比较与二进制编码),实时性强 | 原始LBP对噪声敏感,单个噪声像素会破坏局部编码 |
| 对**单调光照变化**鲁棒(二进制编码消除了光照强度的影响) | 仅关注局部纹理,忽略全局上下文信息(如纹理的空间分布) |
| 局部特征具有**平移不变性**,能捕捉细微纹理模式(如布料的编织纹路) | 固定邻域大小(如3x3)难以适应多尺度或复杂纹理(如树皮的粗纹理) |
| 特征维度可控(通过统计直方图压缩维度),适合嵌入式设备 | 二进制编码丢失了灰度值的量化差异(如邻域像素与中心的灰度差大小) |
五. 算法优化和改进方向
- 多尺度与扩展邻域 :将原始3x3正方形邻域扩展为圆形邻域 (如半径R的圆内取P个采样点,记为LBPP,R),或采用多尺度组合(如同时使用R=1、2的邻域),覆盖不同大小的纹理模式。
- 抗噪声处理 :计算LBP前对图像进行高斯平滑,或用"邻域均值"代替中心像素与邻域的比较(如用3x3均值代替中心像素,减少噪声影响)。
- 均匀LBP与旋转不变性 :采用均匀LBP (仅保留"0-1跳变次数≤2"的模式,如00011100),减少特征维度(从256维降至59维)并提高鲁棒性;或通过旋转归一化(将编码旋转至最小数值),实现旋转不变性(如人脸识别中消除头部旋转的影响)。
- 融合全局信息:将LBP特征与全局特征(如Gabor滤波、HOG特征)结合,弥补局部特征的局限性(如人脸识别时,结合面部轮廓的HOG特征)。
- 深度学习融合 :将LBP特征作为预训练特征输入CNN(如将LBP直方图作为CNN的输入层),或在CNN中加入"LBP层"(用LBP操作替代部分卷积层),结合深度学习的全局建模能力与LBP的局部纹理优势。
- 自适应邻域调整:根据图像局部纹理复杂度动态调整邻域大小(如纹理密集区域用小邻域,纹理稀疏区域用大邻域),提高特征的适应性。
六. OpenCV接口函数
OpenCV提供了基于LBP的人脸识别器及特征匹配接口,核心函数如下:
- LBPH人脸识别器创建:
python
cv2.face.LBPHFaceRecognizer_create([radius[, neighbors[, grid_x[, grid_y[, threshold]]]]])- 说明:创建LBPH(LBP Histogram)人脸识别器,通过统计面部区域的LBP直方图进行身份识别。
- 特征预测函数:
cv2.face.LBPHFaceRecognizer.predict(src)说明:输入待识别图像,返回预测的标签 (身份ID)和置信度(匹配程度,值越小越可信)。
获取更多资料
欢迎下载学习资料,包含:机器学习,深度学习,大模型,CV方向,NLP方向,kaggle大赛,实战项目、自动驾驶等。
"点击" 免费获取 。