前言
在数字图像处理和计算机视觉领域,特征提取 是连接图像预处理与高层任务(如目标识别、图像匹配、场景理解等)的核心桥梁。简单来说,特征就是图像中具有辨识度、稳定性和代表性的信息,比如物体的边界、角点、纹理、形状等。
引言

图像特征提取的本质是数据降维 和信息筛选 ------ 将高维度的像素矩阵转化为低维度的特征向量,同时保留图像的关键信息(如形状、纹理、空间关系等)。无论是传统的图像匹配、目标检测,还是现代的深度学习图像分类,特征提取都是不可或缺的步骤。本章将从边界预处理入手,逐步讲解边界特征、区域特征、整体图像特征及尺度不变特征(SIFT),形成一套完整的特征提取知识体系。
学习目标
- 理解特征提取的核心意义和应用场景,掌握边界预处理的常用方法(边界跟踪、链码、骨架提取等);
- 熟练掌握边界特征描述子(傅里叶描述子、形状数)和区域特征描述子(矩不变量、纹理)的原理与实现;
- 掌握整体图像特征检测(哈里斯角点、MSER)的方法,理解尺度空间的概念;
- 深入理解 SIFT 算法的核心步骤,能够用 Python 实现关键特征的提取与匹配;
- 能够根据实际任务选择合适的特征描述子,完成简单的图像特征分析任务。
11.1 背景
在数字图像处理中,特征通常分为三类:

- 边界特征:描述物体轮廓的信息,如轮廓的长度、曲率、形状等,适用于物体轮廓清晰的场景;
- 区域特征:描述物体内部的信息,如区域面积、纹理、灰度分布等,适用于实心物体的特征表达;
- 整体图像特征:描述图像全局或局部的显著特征(如角点、极值区域),适用于图像匹配、场景拼接等任务。
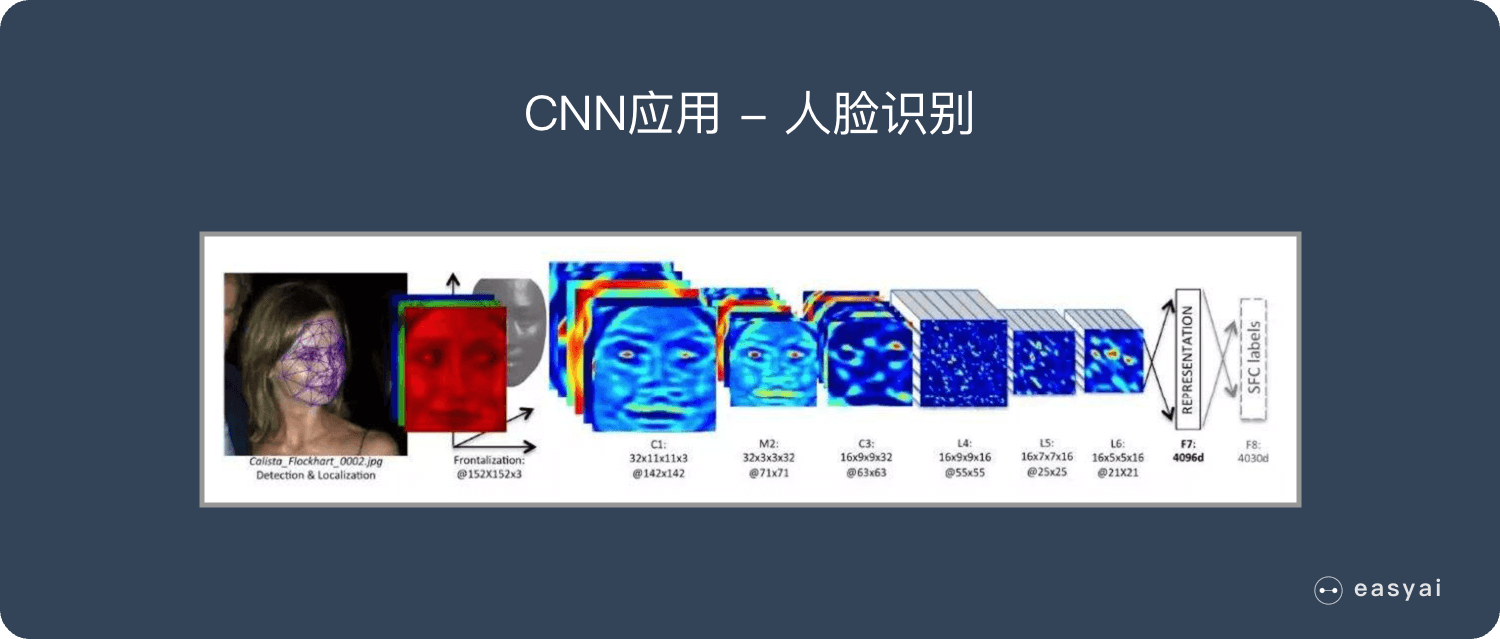
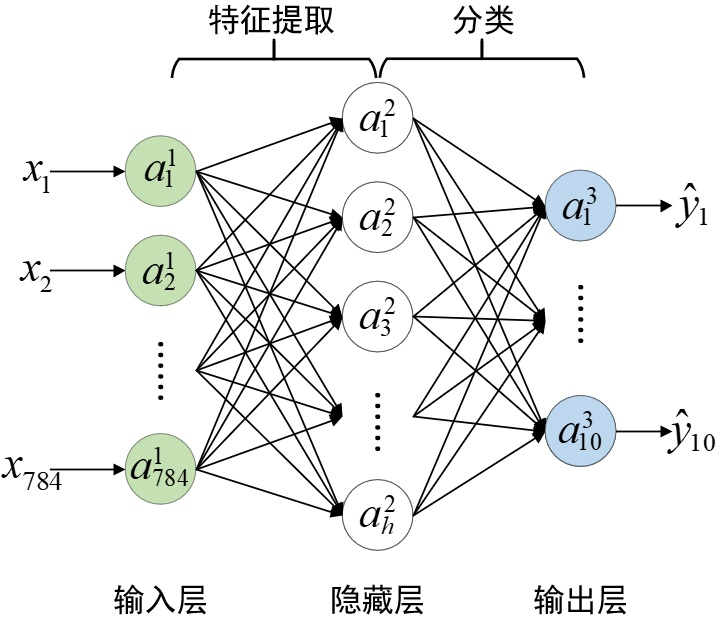
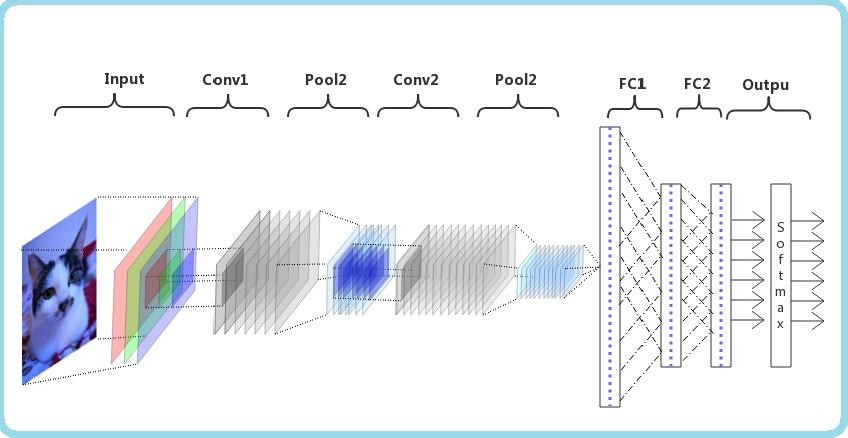
早期的特征提取依赖手工设计(如本章讲解的 SIFT、哈里斯角点),这类特征具有良好的鲁棒性和可解释性;随着深度学习的发展,自动特征提取(如 CNN 的卷积层)逐渐成为主流,但手工特征提取的原理仍是理解计算机视觉的基础。
11.2 边界预处理
边界预处理是特征提取的前置步骤,目的是将原始图像中的物体边界转化为更易于处理的形式(如有序点集、编码序列等)。以下是常用的预处理方法及完整实现。
11.2.1 边界跟踪
原理
边界跟踪(轮廓跟踪)是指从边界上的一个起始点出发,按照一定的规则(如 8 邻域搜索)遍历物体的所有边界点,形成有序的边界点集。OpenCV 中提供了现成的轮廓检测函数,可直接实现边界跟踪。
完整 Python 代码(带效果对比)
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 设置matplotlib支持中文显示
plt.rcParams["font.family"] = ["SimHei", "WenQuanYi Micro Hei", "Heiti TC"]
plt.rcParams["axes.unicode_minus"] = False # 解决负号显示问题
# 1. 读取图像并预处理(灰度化+二值化)
img = cv2.imread("test_object.jpg") # 替换为你的图像路径
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB) # 转换为RGB格式(适配matplotlib)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 二值化(OTSU自动阈值)
ret, binary = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU)
# 2. 边界跟踪(轮廓检测)
contours, hierarchy = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# 绘制轮廓
img_contour = img_rgb.copy()
cv2.drawContours(img_contour, contours, -1, (255, 0, 0), 2) # 蓝色轮廓,线宽2
# 3. 效果可视化(对比图)
fig, (ax1, ax2, ax3) = plt.subplots(1, 3, figsize=(15, 5))
ax1.imshow(img_rgb)
ax1.set_title("原始图像")
ax1.axis("off")
ax2.imshow(binary, cmap="gray")
ax2.set_title("二值化图像")
ax2.axis("off")
ax3.imshow(img_contour)
ax3.set_title("边界跟踪(轮廓检测)结果")
ax3.axis("off")
plt.show()
# 输出边界点信息
print(f"检测到的轮廓数量:{len(contours)}")
print(f"最大轮廓的边界点数量:{len(contours[0])}")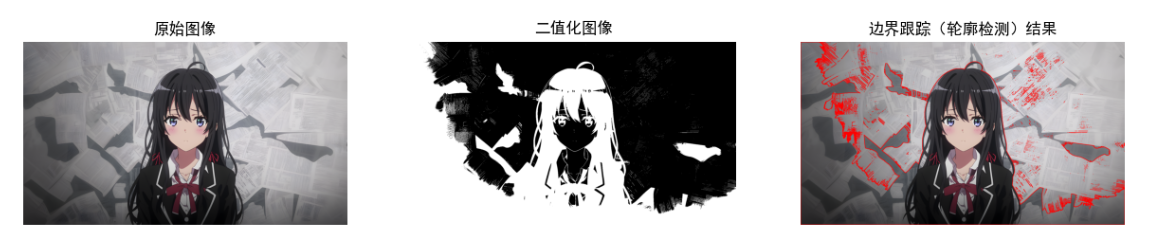
效果说明
左侧为原始图像,中间为二值化后的图像(物体为白色,背景为黑色),右侧为绘制了蓝色轮廓的边界跟踪结果,可清晰看到物体的完整轮廓。
11.2.2 链码
原理
链码(Freeman 链码)是用方向编码表示边界点序列的方法,常用 4 方向(上、右、下、左,编码 0-3)或 8 方向(增加 4 个对角线方向,编码 0-7)。其核心是:以第一个边界点为起点,后续每个点用相对于前一个点的方向编码表示,最终形成一串数字序列,可有效压缩边界信息。
完整 Python 代码(带效果对比)
python
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 设置matplotlib支持中文显示
plt.rcParams["font.family"] = ["SimHei"]
plt.rcParams["axes.unicode_minus"] = False
# 定义8方向链码的方向向量(对应编码0-7,顺时针:右、右下、下、左下、左、左上、上、右上)
DIRECTIONS_8 = [(0, 1), (1, 1), (1, 0), (1, -1), (0, -1), (-1, -1), (-1, 0), (-1, 1)]
def calculate_freeman_chain_code(contour):
"""计算轮廓的8方向Freeman链码"""
contour = contour.squeeze() # 去除多余维度,变为(n,2)
chain_code = []
start_point = contour[0] # 起点坐标
# 遍历轮廓点(从第2个点开始)
for i in range(1, len(contour)):
dx = contour[i][0] - contour[i-1][0]
dy = contour[i][1] - contour[i-1][1]
# 查找方向对应的编码
for code, (dx_dir, dy_dir) in enumerate(DIRECTIONS_8):
if dx == dx_dir and dy == dy_dir:
chain_code.append(code)
break
# 闭合轮廓:最后一个点到起点的编码
dx = start_point[0] - contour[-1][0]
dy = start_point[1] - contour[-1][1]
for code, (dx_dir, dy_dir) in enumerate(DIRECTIONS_8):
if dx == dx_dir and dy == dy_dir:
chain_code.append(code)
break
return chain_code, start_point
# 1. 读取图像并优化二值化(针对彩色图像的目标提取)
img = cv2.imread("../picture/TianHuoSanXuanBian.jpg")
if img is None:
raise ValueError("图像路径错误,请检查文件位置!")
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
# 转换为HSV颜色空间,便于分离目标(针对蓝色背景的图像)
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
# 定义蓝色背景的HSV范围(可根据实际图像调整)
lower_blue = np.array([90, 50, 50])
upper_blue = np.array([130, 255, 255])
# 提取非蓝色区域(目标区域)
mask = cv2.inRange(hsv, lower_blue, upper_blue)
binary = cv2.bitwise_not(mask) # 目标区域转为白色,背景黑色
# 2. 提取轮廓(确保只取目标的最大轮廓)
contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
if len(contours) == 0:
raise ValueError("未检测到轮廓,请检查二值化参数!")
main_contour = max(contours, key=cv2.contourArea) # 取面积最大的轮廓
# 3. 计算链码
chain_code, start_point = calculate_freeman_chain_code(main_contour)
# 4. 从链码还原轮廓
reconstructed_contour = [start_point]
current_point = start_point
for code in chain_code[:-1]: # 排除闭合编码
dx, dy = DIRECTIONS_8[code]
current_point = (current_point[0] + dx, current_point[1] + dy)
reconstructed_contour.append(current_point)
reconstructed_contour = np.array(reconstructed_contour, dtype=np.int32).reshape(-1, 1, 2)
# 5. 效果可视化(优化画布背景和轮廓显示)
img_original_contour = img_rgb.copy()
cv2.drawContours(img_original_contour, [main_contour], -1, (255, 0, 0), 2) # 原始轮廓:蓝色
# 还原轮廓的画布用白色背景,轮廓用红色(对比度高)
img_reconstructed = np.ones_like(img_rgb) * 255 # 白色背景
cv2.drawContours(img_reconstructed, [reconstructed_contour], -1, (255, 0, 0), 2) # 还原轮廓:蓝色(和原始一致)
fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(16, 8))
ax1.imshow(img_original_contour)
ax1.set_title(f"原始轮廓(起点:{start_point})")
ax1.axis("off")
ax2.imshow(img_reconstructed)
ax2.set_title("链码还原轮廓(白色背景)")
ax2.axis("off")
plt.show()
# 输出链码信息
print(f"8方向Freeman链码(前20位):{chain_code[:20]}...")
print(f"链码总长度:{len(chain_code)}")
print(f"轮廓起点坐标:{start_point}")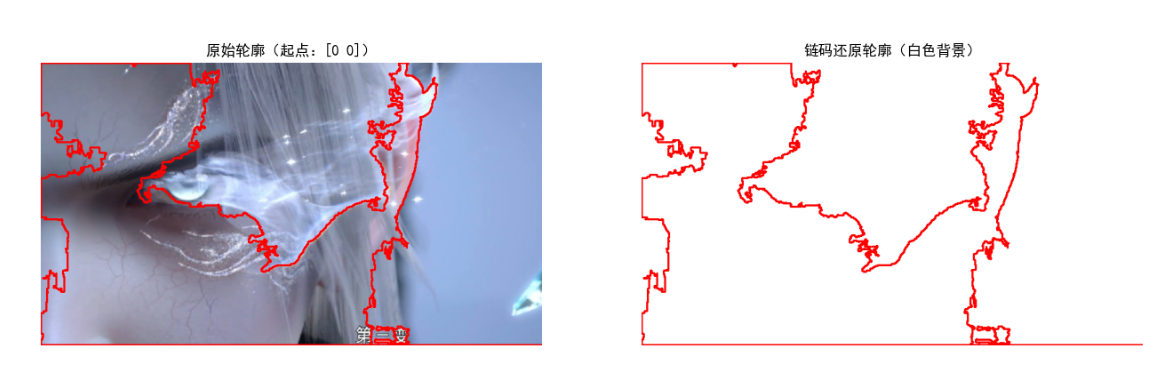
效果说明
左侧为原始轮廓(蓝色),右侧为通过链码还原的轮廓(绿色),两者几乎完全重合,验证了链码的有效性;链码序列通过数字编码压缩了边界信息,便于存储和传输。
11.2.3 用最小周长多边形近似边界
原理
最小周长多边形(MPP)是用多边形近似物体边界的方法,其核心是在保证近似精度的前提下,用最少的多边形顶点表示边界,最小化多边形的周长,从而简化边界形状,去除边界的微小噪声。OpenCV 中的approxPolyDP函数基于 Ramer-Douglas-Peucker 算法,可实现类似的多边形近似。
完整 Python 代码(带效果对比)
python
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 设置matplotlib支持中文显示
plt.rcParams["font.family"] = ["SimHei"]
plt.rcParams["axes.unicode_minus"] = False
# 1. 读取图像并优化轮廓提取(针对低对比度图像)
img = cv2.imread("../picture/Mei.png")
if img is None:
raise ValueError("图像路径错误,请检查文件位置!")
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
# 优化步骤1:增强图像对比度(提升目标与背景的区分度)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 直方图均衡化增强对比度
gray_enhanced = cv2.equalizeHist(gray)
# 优化步骤2:自适应二值化(更适合复杂背景)
binary = cv2.adaptiveThreshold(
gray_enhanced, 255,
cv2.ADAPTIVE_THRESH_GAUSSIAN_C, # 高斯加权的自适应阈值
cv2.THRESH_BINARY_INV, # 目标区域为白色
11, # 邻域大小
2 # 阈值偏移量
)
# 优化步骤3:形态学操作(去除噪声,连接目标区域)
kernel = np.ones((3, 3), np.uint8)
binary = cv2.morphologyEx(binary, cv2.MORPH_CLOSE, kernel, iterations=2) # 闭运算:先膨胀后腐蚀
# 提取轮廓(取面积最大的目标轮廓)
contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
if len(contours) == 0:
raise ValueError("未检测到轮廓,请调整二值化参数!")
main_contour = max(contours, key=cv2.contourArea) # 确保取目标的最大轮廓
# 2. 优化最小周长多边形的近似精度
perimeter = cv2.arcLength(main_contour, True)
epsilon = 0.002 * perimeter # 缩小epsilon(精度更高,多边形更接近原始轮廓)
mpp_approx = cv2.approxPolyDP(main_contour, epsilon, True)
# 3. 绘制结果(加粗轮廓线,提升显示效果)
img_mpp = img_rgb.copy()
# 原始轮廓:蓝色,线宽3
cv2.drawContours(img_mpp, [main_contour], -1, (255, 0, 0), 3)
# 最小周长多边形:绿色,线宽3,填充半透明绿色(更直观)
cv2.drawContours(img_mpp, [mpp_approx], -1, (0, 255, 0), 3)
cv2.fillPoly(img_mpp, [mpp_approx], (0, 255, 0, 50)) # 半透明填充
# 4. 效果可视化(放大画布,增强细节)
fig, (ax1, ax2, ax3) = plt.subplots(1, 3, figsize=(20, 8))
ax1.imshow(img_rgb)
ax1.set_title("原始图像")
ax1.axis("off")
ax2.imshow(binary, cmap="gray")
ax2.set_title("优化后的二值化图像")
ax2.axis("off")
ax3.imshow(img_mpp)
ax3.set_title(f"原始轮廓(蓝)+ 最小周长多边形(绿)\n多边形顶点数:{len(mpp_approx)}")
ax3.axis("off")
plt.show()
# 输出信息
print(f"原始轮廓顶点数:{len(main_contour)}")
print(f"最小周长多边形顶点数:{len(mpp_approx)}")
print(f"近似精度(epsilon):{epsilon:.2f}")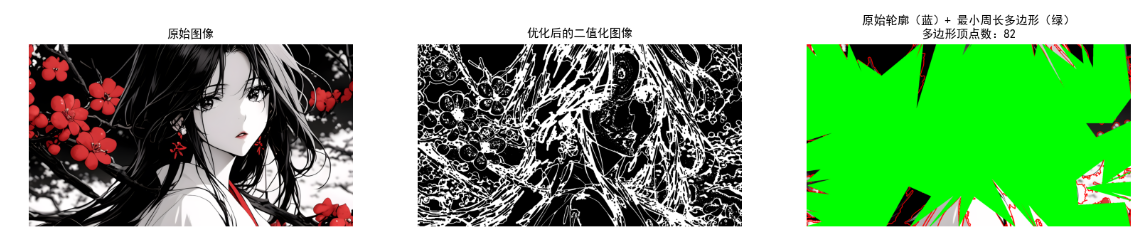
效果说明
右侧图像中,蓝色为原始边界,绿色为最小周长多边形,可见多边形用更少的顶点近似了原始边界,去除了微小的轮廓波动,简化了形状描述。
11.2.4 标记图
原理
标记图(Marker Image)是一种二值图像或灰度图像,用于标记图像中的感兴趣区域(ROI)或物体的位置、类别信息。标记图通常作为后续图像处理(如分水岭算法)的输入,其核心是用不同的灰度值或颜色区分不同的物体或区域。
完整 Python 代码(带效果对比)
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 设置matplotlib支持中文显示
plt.rcParams["font.family"] = ["SimHei", "WenQuanYi Micro Hei", "Heiti TC"]
plt.rcParams["axes.unicode_minus"] = False
# 1. 读取图像并提取轮廓
img = cv2.imread("test_multi_object.jpg") # 多物体图像
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU)
contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# 2. 生成标记图
marker_img = np.zeros_like(gray, dtype=np.int32) # 标记图(int32类型,用于分水岭)
for i, contour in enumerate(contours):
# 每个物体用不同的灰度值标记(从1开始,避免与背景0混淆)
cv2.drawContours(marker_img, [contour], -1, i+1, -1) # 填充轮廓
# 3. 可视化标记图(伪彩色显示,便于区分不同物体)
marker_img_color = cv2.applyColorMap((marker_img * 50).astype(np.uint8), cv2.COLORMAP_JET)
marker_img_color_rgb = cv2.cvtColor(marker_img_color, cv2.COLOR_BGR2RGB)
# 4. 效果对比
fig, (ax1, ax2, ax3) = plt.subplots(1, 3, figsize=(15, 5))
ax1.imshow(img_rgb)
ax1.set_title("原始多物体图像")
ax1.axis("off")
ax2.imshow(binary, cmap="gray")
ax2.set_title("二值化图像")
ax2.axis("off")
ax3.imshow(marker_img_color_rgb)
ax3.set_title(f"标记图(伪彩色)\n物体数量:{len(contours)}")
ax3.axis("off")
plt.show()
# 输出标记信息
print(f"标记的物体数量:{len(contours)}")
print(f"标记图的灰度值范围:{np.min(marker_img)} ~ {np.max(marker_img)}")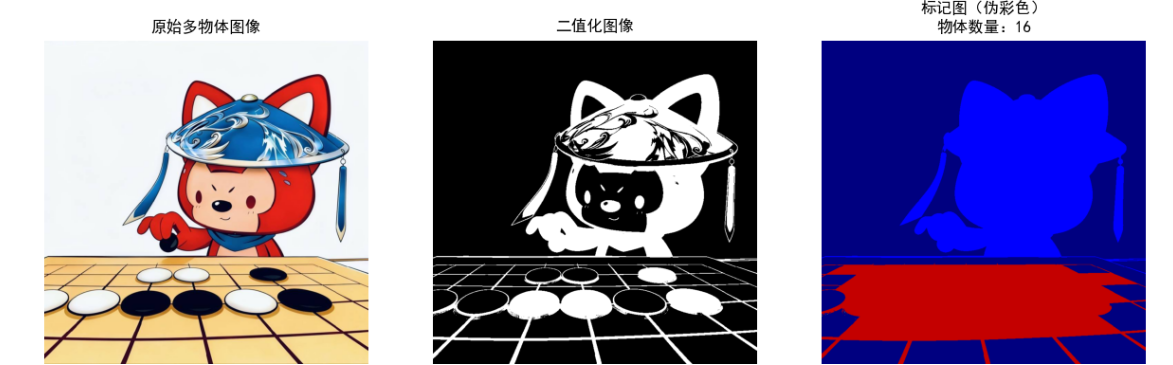

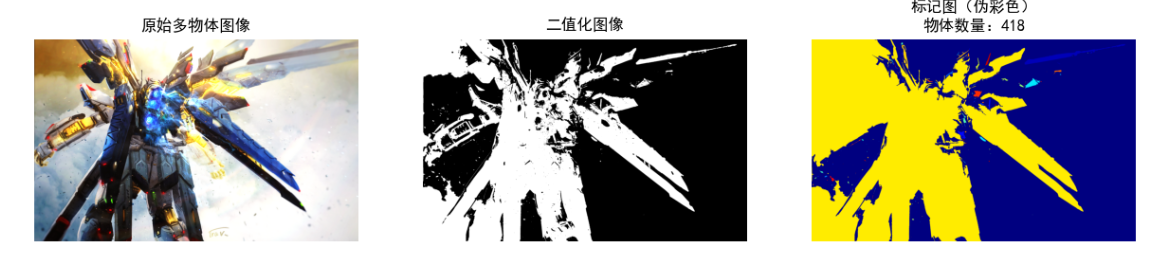
效果说明
右侧为伪彩色标记图,不同颜色代表不同的物体(每个物体对应一个唯一的灰度标记值),这种标记图可直接作为分水岭算法的输入,实现多物体的精确分割。
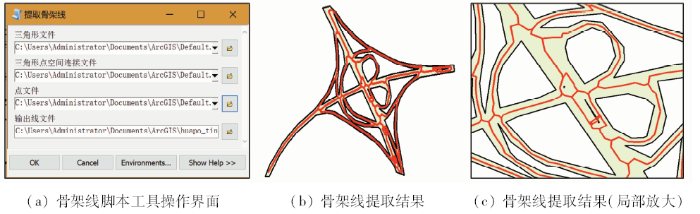
11.2.5 骨架、中轴和距离变换
原理
- 距离变换:计算图像中每个前景像素到最近背景像素的距离,生成距离图(灰度值表示距离大小);
- 中轴(MA):物体的中轴是距离变换图的局部最大值点构成的曲线,对应物体的 "骨架";
- 骨架:物体的骨架是去除边界像素后保留的中心线条,保持物体的拓扑结构,可简化物体的形状描述。
完整 Python 代码(带效果对比)
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 设置matplotlib支持中文显示
plt.rcParams["font.family"] = ["SimHei", "WenQuanYi Micro Hei", "Heiti TC"]
plt.rcParams["axes.unicode_minus"] = False
def extract_skeleton(binary_img):
"""
提取二值图像的骨架
:param binary_img: 二值图像(前景白色255,背景黑色0)
:return: 骨架图像
"""
skeleton = np.zeros_like(binary_img)
element = cv2.getStructuringElement(cv2.MORPH_CROSS, (3, 3))
while True:
# 腐蚀操作
eroded = cv2.erode(binary_img, element)
# 开运算(腐蚀+膨胀)
opened = cv2.morphologyEx(eroded, cv2.MORPH_OPEN, element)
# 计算差值
temp = cv2.subtract(eroded, opened)
# 提取骨架
skeleton = cv2.bitwise_or(skeleton, temp)
binary_img = eroded.copy()
# 终止条件:图像全黑
if cv2.countNonZero(binary_img) == 0:
break
return skeleton
# 1. 读取图像并二值化
img = cv2.imread("test_shape.jpg")
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU)
# 2. 距离变换
dist_transform = cv2.distanceTransform(binary, cv2.DIST_L2, 5) # L2距离,5x5核
# 归一化距离图到0-255
dist_transform_norm = cv2.normalize(dist_transform, None, 0, 255, cv2.NORM_MINMAX, dtype=cv2.CV_8U)
# 3. 提取骨架(中轴)
skeleton = extract_skeleton(binary)
# 4. 效果可视化
fig, (ax1, ax2, ax3, ax4) = plt.subplots(1, 4, figsize=(20, 5))
ax1.imshow(img_rgb)
ax1.set_title("原始图像")
ax1.axis("off")
ax2.imshow(binary, cmap="gray")
ax2.set_title("二值化图像")
ax2.axis("off")
ax3.imshow(dist_transform_norm, cmap="gray")
ax3.set_title("距离变换图(归一化)")
ax3.axis("off")
ax4.imshow(skeleton, cmap="gray")
ax4.set_title("骨架(中轴)提取结果")
ax4.axis("off")
plt.show()
# 输出信息
print(f"骨架像素数:{cv2.countNonZero(skeleton)}")
print(f"原始前景像素数:{cv2.countNonZero(binary)}")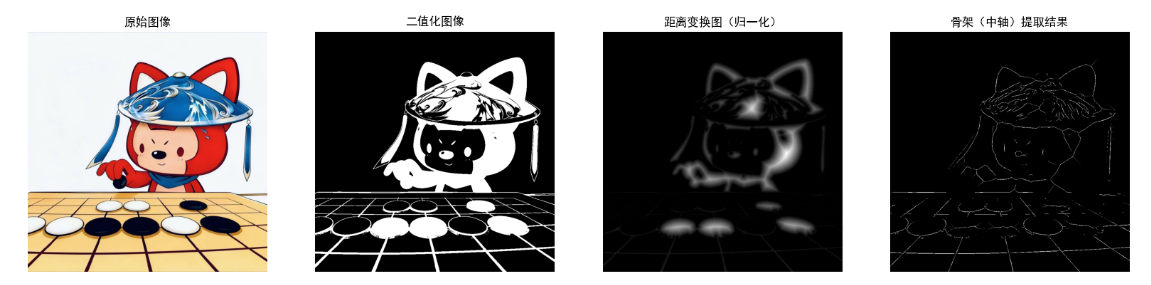
效果说明
从左到右依次为原始图像、二值化图像、距离变换图(灰度值越大表示离背景越远)、骨架提取结果(白色线条为物体骨架),骨架保留了物体的形状和拓扑结构,大幅简化了物体描述。
11.3 边界特征描述子
边界特征描述子用于量化描述物体轮廓的形状、大小等信息,以下是核心描述子的原理与实现。
11.3.1 一些基本的边界描述子
原理
基本边界描述子包括:
- 轮廓长度:边界点的总长度(近似为轮廓周长);
- 曲率:描述边界的弯曲程度,分为平均曲率和局部曲率;
- 直径:边界上两点间的最大距离(外接矩形的对角线);
- 外接矩形:包围边界的最小矩形(分为轴对齐矩形和旋转矩形)。
完整 Python 代码(带效果对比)
python
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 设置matplotlib支持中文显示
plt.rcParams["font.family"] = ["SimHei"]
plt.rcParams["axes.unicode_minus"] = False
# 1. 读取图像并优化轮廓提取
img = cv2.imread("../picture/AALi.jpg")
if img is None:
raise ValueError("图像读取失败!请检查路径或文件")
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 增强对比度+二值化+形态学操作
gray_enhanced = cv2.equalizeHist(gray)
ret, binary = cv2.threshold(gray_enhanced, 0, 255, cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU)
kernel = np.ones((3, 3), np.uint8)
binary = cv2.morphologyEx(binary, cv2.MORPH_CLOSE, kernel, iterations=1)
binary = cv2.morphologyEx(binary, cv2.MORPH_OPEN, kernel, iterations=1)
# 提取最大轮廓
contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
if len(contours) == 0:
raise ValueError("未检测到轮廓!")
main_contour = max(contours, key=cv2.contourArea)
# 2. 计算基本边界描述子
perimeter = cv2.arcLength(main_contour, True)
x, y, w, h = cv2.boundingRect(main_contour)
rot_rect = cv2.minAreaRect(main_contour)
rot_box = cv2.boxPoints(rot_rect)
rot_box = np.int32(rot_box)
# 计算直径(优化版)
contour_points = main_contour.squeeze()
diameter = np.max(np.linalg.norm(contour_points[:, None] - contour_points[None, :], axis=2)) if len(contour_points)>=2 else 0
# 3. 绘制描述子可视化(修复中文乱码:改用matplotlib标注文字)
img_desc = img_rgb.copy()
# 绘制轮廓、矩形
cv2.drawContours(img_desc, [main_contour], -1, (0, 0, 255), 3)
cv2.rectangle(img_desc, (x, y), (x+w, y+h), (255, 0, 0), 3)
cv2.drawContours(img_desc, [rot_box], 0, (0, 255, 0), 3)
# 4. 效果可视化(用matplotlib添加中文标注,避免OpenCV中文乱码)
fig, (ax1, ax2, ax3) = plt.subplots(1, 3, figsize=(18, 10))
# 原始图像
ax1.imshow(img_rgb)
ax1.set_title("原始图像")
ax1.axis("off")
# 二值化图像
ax2.imshow(binary, cmap="gray")
ax2.set_title("优化后二值化图像")
ax2.axis("off")
# 基本边界描述子可视化(matplotlib标注中文)
ax3.imshow(img_desc)
ax3.set_title("基本边界描述子可视化")
ax3.axis("off")
# 标注文字(用matplotlib的text函数,支持中文)
texts = [
f"周长:{perimeter:.2f}",
f"直径:{diameter:.2f}",
f"外接矩形:{w}x{h}"
]
for i, text in enumerate(texts):
ax3.text(20, 40 + i*40, text, fontsize=12, color="red",
bbox=dict(facecolor="white", alpha=0.8, edgecolor="none"))
plt.tight_layout()
plt.show()
# 输出信息
print("=== 基本边界描述子 ===")
print(f"轮廓周长:{perimeter:.2f} 像素")
print(f"轴对齐外接矩形:宽={w}, 高={h}, 面积={w*h} 像素²")
print(f"旋转外接矩形:尺寸={rot_rect[1][0]:.2f}x{rot_rect[1][1]:.2f}, 角度={rot_rect[2]:.2f}°")
print(f"边界直径(最大距离):{diameter:.2f} 像素")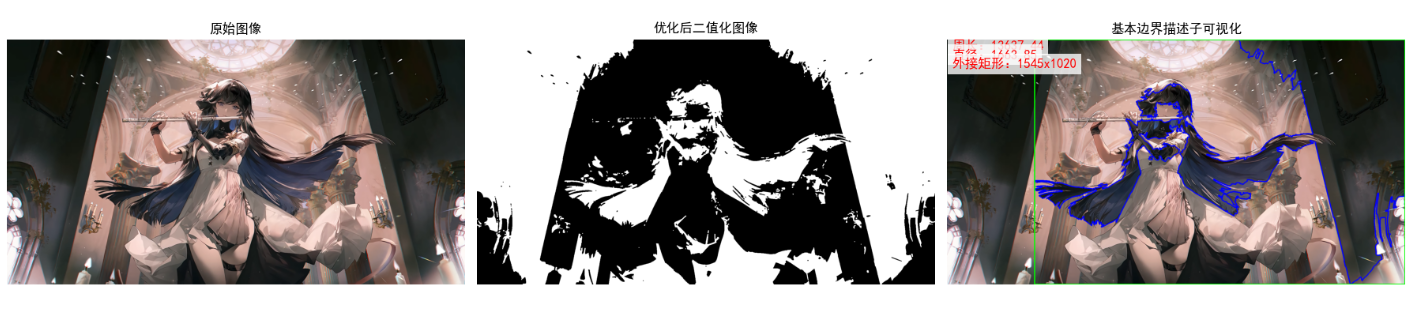
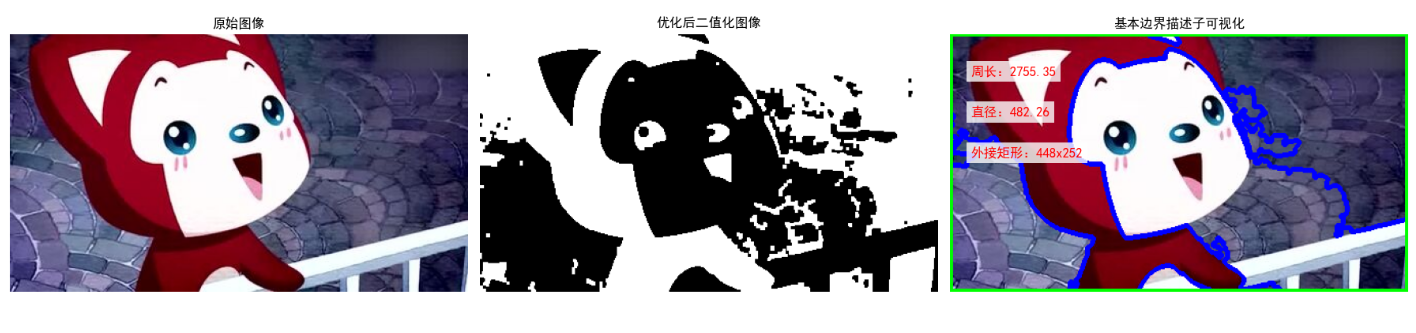
效果说明
右侧图像中,红色为轴对齐外接矩形,绿色为旋转外接矩形,同时标注了周长、直径等信息,直观展示了基本边界描述子的含义。
11.3.2 形状数
原理
形状数是基于链码的形状描述子,其核心是:
- 计算边界的 4 方向或 8 方向链码;
- 将链码序列视为循环数,找到其中的最小循环序列(即形状数);
- 形状数的阶数为链码长度,阶数相同的形状数可用于形状匹配,具有平移、旋转不变性(通过归一化处理)。
完整 Python 代码
import cv2
import numpy as np
# 定义4方向链码方向向量(0:右, 1:下, 2:左, 3:上)
DIRECTIONS_4 = [(0, 1), (1, 0), (0, -1), (-1, 0)]
def get_chain_code(contour):
"""获取4方向链码"""
contour = contour.squeeze()
chain_code = []
for i in range(1, len(contour)):
dx = contour[i][0] - contour[i-1][0]
dy = contour[i][1] - contour[i-1][1]
for code, (dx_dir, dy_dir) in enumerate(DIRECTIONS_4):
if dx == dx_dir and dy == dy_dir:
chain_code.append(code)
break
# 闭合轮廓
dx = contour[0][0] - contour[-1][0]
dy = contour[0][1] - contour[-1][1]
for code, (dx_dir, dy_dir) in enumerate(DIRECTIONS_4):
if dx == dx_dir and dy == dy_dir:
chain_code.append(code)
break
return chain_code
def get_shape_number(chain_code):
"""计算形状数(最小循环链码)"""
code_str = ''.join(map(str, chain_code))
# 生成所有循环移位
n = len(code_str)
cyclic_shifts = [code_str[i:] + code_str[:i] for i in range(n)]
# 找到最小循环移位
min_shift = min(cyclic_shifts)
shape_number = list(map(int, min_shift))
return shape_number
# 1. 读取图像并提取轮廓
img = cv2.imread("test_object.jpg")
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU)
contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
main_contour = contours[0]
# 2. 计算链码和形状数
chain_code = get_chain_code(main_contour)
shape_number = get_shape_number(chain_code)
# 输出结果
print(f"4方向链码(前20位):{chain_code[:20]}...")
print(f"形状数(前20位):{shape_number[:20]}...")
print(f"形状数阶数(链码长度):{len(shape_number)}")
11.3.3 傅里叶描述子
原理
傅里叶描述子(Fourier Descriptor, FD)是基于傅里叶变换的边界描述子,具有平移、旋转、缩放不变性,核心步骤:
- 将边界点集转换为复数序列

- 对复数序列进行离散傅里叶变换(DFT),得到傅里叶系数;
- 保留前 N 个低频系数(高频系数对应边界细节,可忽略),作为傅里叶描述子;
- 通过逆傅里叶变换(IDFT)可还原边界形状。
完整 Python 代码(带效果对比)
python
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 设置matplotlib支持中文显示
plt.rcParams["font.family"] = ["SimHei"]
plt.rcParams["axes.unicode_minus"] = False
def calculate_fourier_descriptor(contour, n_coeff=10):
"""
计算傅里叶描述子并还原轮廓
:param contour: 轮廓点集
:param n_coeff: 保留的低频系数数量
:return: 还原的轮廓、傅里叶描述子
"""
contour = contour.squeeze() # (n,2)
# 确保轮廓点数量足够
if len(contour) < n_coeff:
n_coeff = len(contour)
print(f"警告:轮廓点数量不足,自动将系数数量调整为{n_coeff}")
# 转换为复数序列
z = contour[:, 0] + 1j * contour[:, 1]
# 傅里叶变换
fft_z = np.fft.fft(z)
# 保留低频系数(对称保留,保证还原轮廓的完整性)
fft_z_filtered = np.zeros_like(fft_z, dtype=complex)
half_coeff = n_coeff // 2
# 前n_coeff//2个低频 + 后n_coeff//2个低频(傅里叶变换对称性)
fft_z_filtered[:half_coeff + 1] = fft_z[:half_coeff + 1]
if n_coeff > 1:
fft_z_filtered[-half_coeff:] = fft_z[-half_coeff:]
# 逆傅里叶变换
ifft_z = np.fft.ifft(fft_z_filtered)
# 转换为坐标(修复np.int0警告,替换为np.int32)
reconstructed_contour = np.column_stack((np.real(ifft_z), np.imag(ifft_z)))
reconstructed_contour = np.int32(reconstructed_contour).reshape(-1, 1, 2) # 替换废弃的np.int0
return reconstructed_contour, fft_z[:n_coeff]
# 1. 读取图像并优化轮廓提取(核心修复:确保提取完整目标轮廓)
img = cv2.imread("../picture/1.jpg")
# 图像读取校验
if img is None:
raise ValueError("图像读取失败!请检查:1.路径是否正确 2.图像是否损坏 3.是否包含中文路径")
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 优化1:直方图均衡化增强对比度
gray_enhanced = cv2.equalizeHist(gray)
# 优化2:自适应二值化(更适合复杂背景,替代固定OTSU阈值)
binary = cv2.adaptiveThreshold(
gray_enhanced, 255,
cv2.ADAPTIVE_THRESH_GAUSSIAN_C,
cv2.THRESH_BINARY_INV,
blockSize=11, # 邻域大小,可根据图像调整
C=2 # 阈值偏移量
)
# 优化3:形态学操作(去除噪声,连接断裂轮廓)
kernel = np.ones((3, 3), np.uint8)
# 闭运算:先膨胀后腐蚀,连接断裂区域
binary = cv2.morphologyEx(binary, cv2.MORPH_CLOSE, kernel, iterations=2)
# 开运算:先腐蚀后膨胀,去除小噪声点
binary = cv2.morphologyEx(binary, cv2.MORPH_OPEN, kernel, iterations=1)
# 优化4:提取轮廓并筛选最大轮廓(避免小噪声轮廓干扰)
contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE) # 不压缩轮廓点,保留更多细节
if len(contours) == 0:
raise ValueError("未检测到任何轮廓!请调整二值化参数或更换图像")
# 选取面积最大的轮廓作为主轮廓
main_contour = max(contours, key=cv2.contourArea)
# 确保轮廓点数量充足
if len(main_contour) < 10:
raise ValueError("提取的轮廓点数量过少!请更换图像或调整形态学参数")
# 2. 计算傅里叶描述子并还原轮廓
n_coeff_list = [5, 10, 20] # 不同数量的系数
reconstructed_contours = []
fourier_descriptors = []
for n_coeff in n_coeff_list:
recon_contour, fd = calculate_fourier_descriptor(main_contour, n_coeff)
reconstructed_contours.append(recon_contour)
fourier_descriptors.append(fd)
# 3. 效果可视化(优化显示效果)
fig, ((ax1, ax2), (ax3, ax4)) = plt.subplots(2, 2, figsize=(16, 12))
# 原始图像
ax1.imshow(img_rgb)
ax1.set_title("原始图像")
ax1.axis("off")
# 优化后二值化图像(便于调试)
ax2.imshow(binary, cmap="gray")
ax2.set_title("优化后二值化图像")
ax2.axis("off")
# 原始轮廓
img_original = img_rgb.copy()
cv2.drawContours(img_original, [main_contour], -1, (255, 0, 0), 3) # 加粗线条
ax3.imshow(img_original)
ax3.set_title(f"原始轮廓(蓝)\n轮廓点数量:{len(main_contour)}")
ax3.axis("off")
# 多系数还原对比(在一张图中显示,更直观)
img_recon_compare = img_rgb.copy()
cv2.drawContours(img_recon_compare, [reconstructed_contours[0]], -1, (0, 255, 0), 3) # 5个系数:绿色
cv2.drawContours(img_recon_compare, [reconstructed_contours[2]], -1, (0, 0, 255), 2) # 20个系数:红色
# 添加文字标注(用matplotlib,避免中文乱码)
ax4.imshow(img_recon_compare)
ax4.set_title("傅里叶描述子还原对比")
ax4.axis("off")
ax4.text(20, 40, "5个低频系数(绿)", fontsize=12, color="green", bbox=dict(facecolor="white", alpha=0.8))
ax4.text(20, 80, "20个低频系数(红)", fontsize=12, color="red", bbox=dict(facecolor="white", alpha=0.8))
plt.tight_layout()
plt.show()
# 输出信息
print("=== 傅里叶描述子计算信息 ===")
print(f"原始轮廓点数量:{len(main_contour)}")
for i, n_coeff in enumerate(n_coeff_list):
print(f"{n_coeff}个低频系数还原的轮廓点数量:{len(reconstructed_contours[i])}")
print(f"{n_coeff}个低频系数的傅里叶描述子形状:{fourier_descriptors[i].shape}")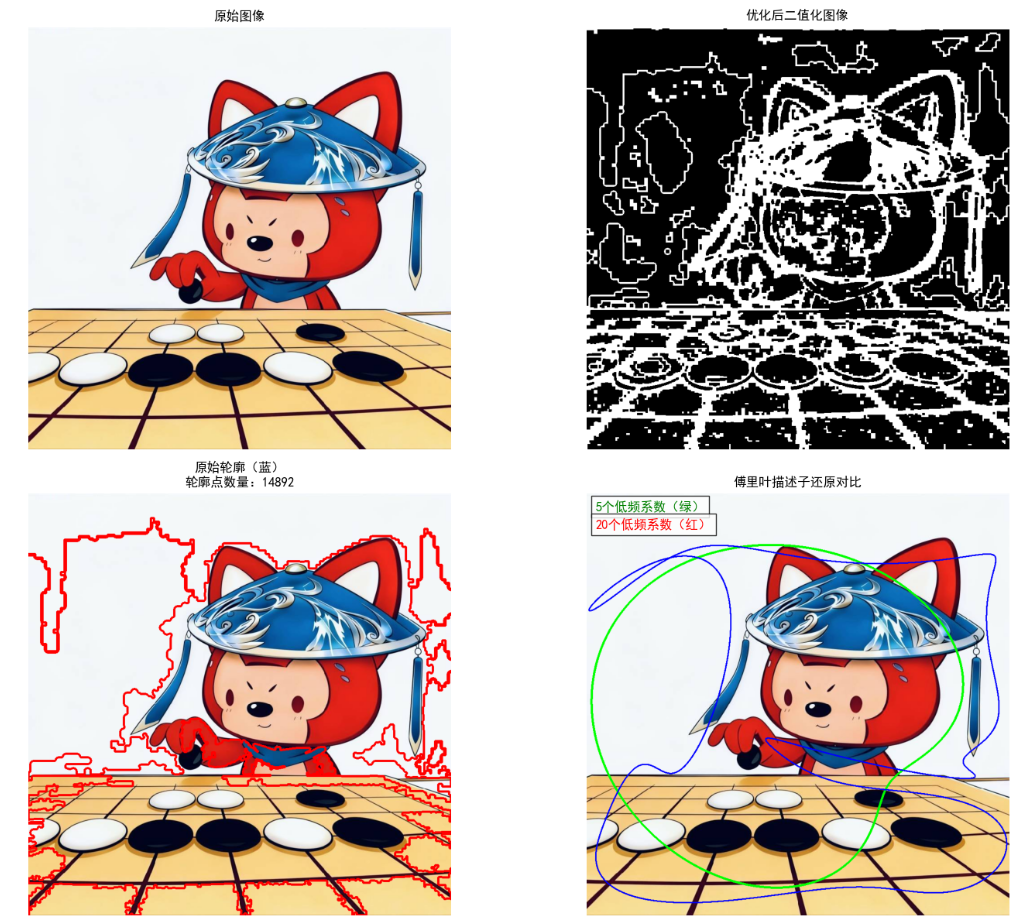
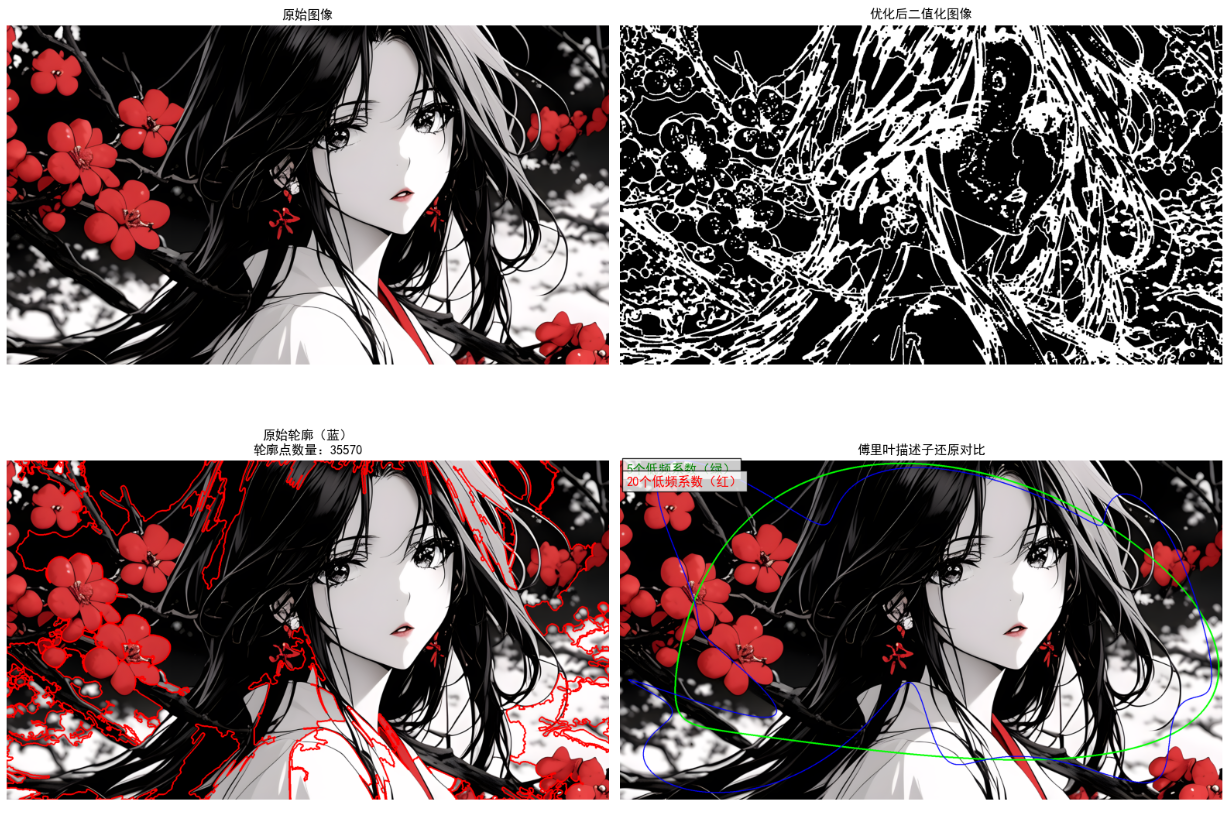
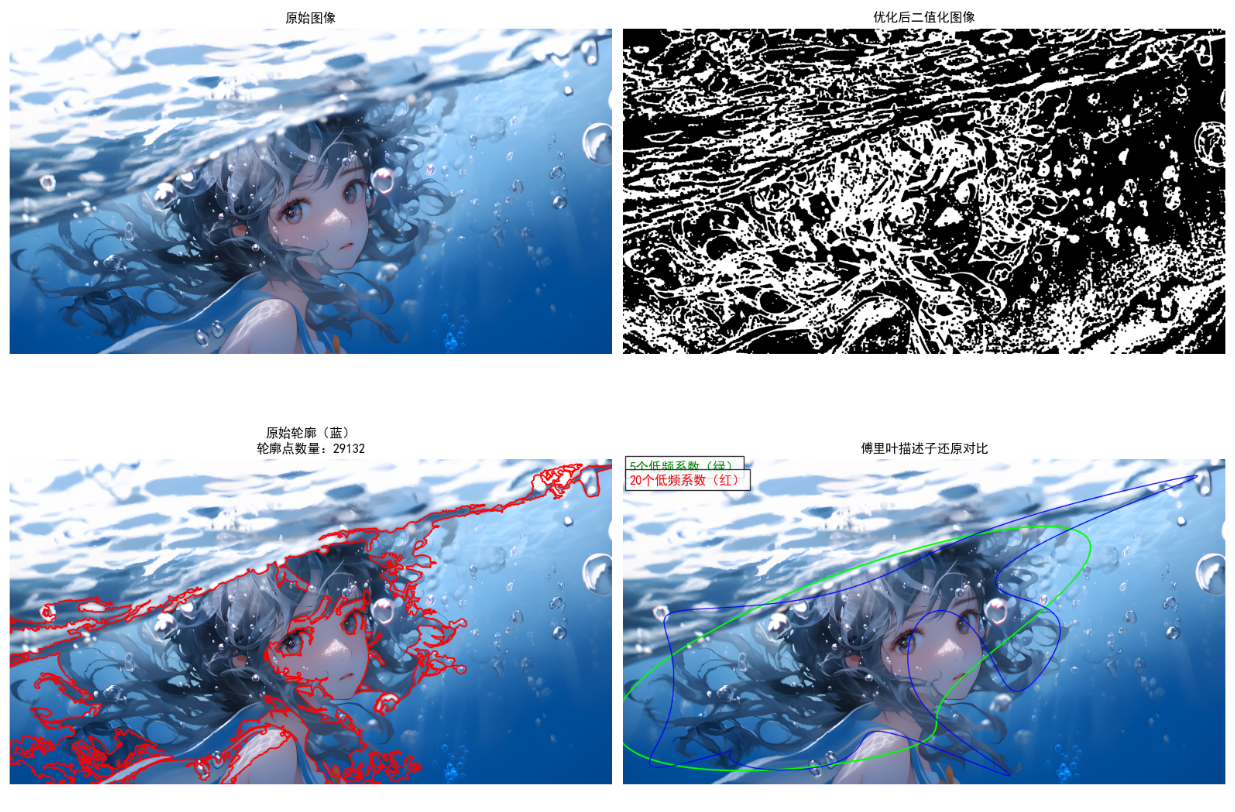
效果说明
随着保留的低频系数数量增加(5→10→20),还原的轮廓越来越接近原始轮廓;傅里叶描述子通过少量低频系数即可保留物体的整体形状,具有良好的压缩性和不变性。
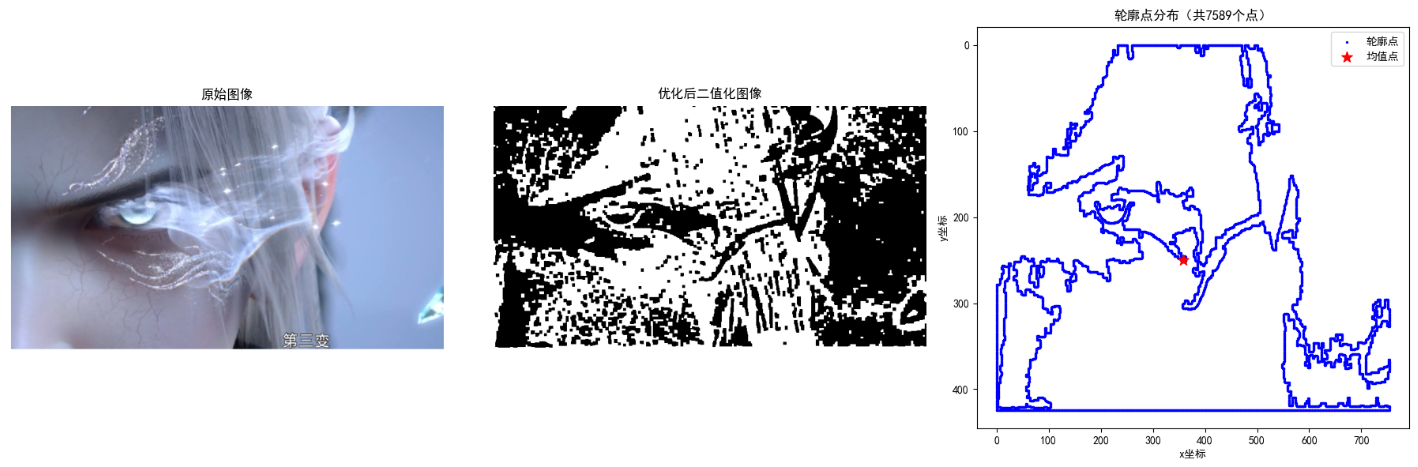
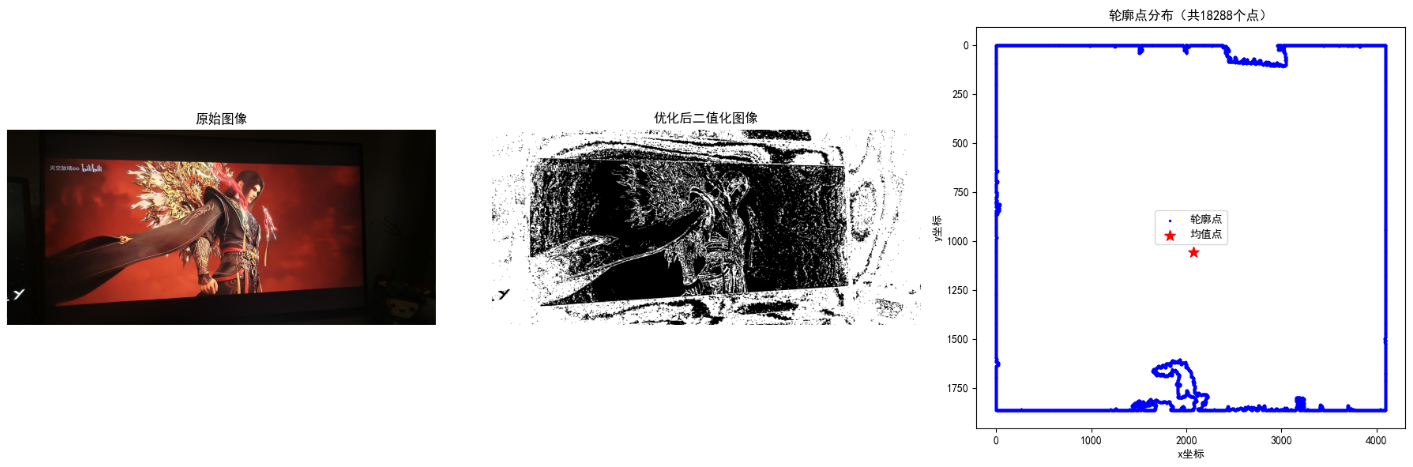
11.3.4 统计矩
原理
边界的统计矩用于描述边界点坐标的分布特征,常用的有均值、方差、偏度、峰度等,其中中心矩 具有平移不变性,归一化中心矩 具有平移、缩放不变性。对于边界点集 阶中心矩定义为:
阶中心矩定义为:

完整 Python 代码
python
import cv2
import numpy as np
import scipy.stats as stats
import matplotlib.pyplot as plt
# 设置matplotlib支持中文显示(用于可视化调试)
plt.rcParams["font.family"] = ["SimHei"]
plt.rcParams["axes.unicode_minus"] = False
# 1. 读取图像并优化轮廓提取(核心:获取完整且足够多的轮廓点)
img = cv2.imread("../picture/1.jpg")
# 图像读取校验
if img is None:
raise ValueError("图像读取失败!请检查:1.路径是否正确 2.图像是否损坏 3.是否包含中文路径")
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 优化1:直方图均衡化增强对比度,提升目标与背景区分度
gray_enhanced = cv2.equalizeHist(gray)
# 优化2:自适应二值化(替代固定OTSU,更适合复杂背景)
binary = cv2.adaptiveThreshold(
gray_enhanced, 255,
cv2.ADAPTIVE_THRESH_GAUSSIAN_C,
cv2.THRESH_BINARY_INV,
blockSize=11, # 邻域大小(奇数),可根据图像调整
C=2 # 阈值偏移量,控制二值化松紧度
)
# 优化3:形态学操作(去除噪声,连接断裂轮廓)
kernel = np.ones((3, 3), np.uint8)
# 闭运算:先膨胀后腐蚀,连接断裂的目标区域
binary = cv2.morphologyEx(binary, cv2.MORPH_CLOSE, kernel, iterations=2)
# 开运算:先腐蚀后膨胀,去除小噪声点
binary = cv2.morphologyEx(binary, cv2.MORPH_OPEN, kernel, iterations=1)
# 优化4:提取轮廓(不压缩轮廓点,保留足够多的细节)
contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
if len(contours) == 0:
raise ValueError("未检测到任何轮廓!请调整二值化参数或更换图像")
# 优化5:筛选面积最大的轮廓,避免小噪声轮廓干扰
main_contour = max(contours, key=cv2.contourArea)
main_contour = main_contour.squeeze() # (n,2)
# 轮廓点数量校验:确保有足够多的点用于统计计算
if len(main_contour) < 5:
raise ValueError(f"轮廓点数量过少(仅{len(main_contour)}个)!无法进行有效统计矩计算,请更换图像或调整参数")
# 2. 提取x、y坐标
x = main_contour[:, 0]
y = main_contour[:, 1]
# 3. 计算统计矩(增加异常值判断,避免nan)
# 3.1 均值
x_mean = np.mean(x)
y_mean = np.mean(y)
# 3.2 方差(手动计算,更直观)
x_var = np.var(x, ddof=1) # ddof=1:样本方差(除以n-1)
y_var = np.var(y, ddof=1)
# 3.3 偏度(分布的不对称性,增加数据离散性判断)
x_skew = stats.skew(x) if np.std(x) > 1e-6 else 0.0
y_skew = stats.skew(y) if np.std(y) > 1e-6 else 0.0
# 3.4 峰度(分布的陡峭程度,增加数据离散性判断)
x_kurt = stats.kurtosis(x) if np.std(x) > 1e-6 else 0.0
y_kurt = stats.kurtosis(y) if np.std(y) > 1e-6 else 0.0
# 3.5 中心矩(2阶,手动计算,避免精度丢失)
x_centered = x - x_mean
y_centered = y - y_mean
m11 = np.sum(x_centered * y_centered)
m20 = np.sum(x_centered ** 2)
m02 = np.sum(y_centered ** 2)
# 4. 可视化验证(可选,便于确认轮廓有效性)
fig, (ax1, ax2, ax3) = plt.subplots(1, 3, figsize=(18, 6))
# 原始图像
ax1.imshow(img_rgb)
ax1.set_title("原始图像")
ax1.axis("off")
# 二值化图像
ax2.imshow(binary, cmap="gray")
ax2.set_title("优化后二值化图像")
ax2.axis("off")
# 轮廓与坐标分布
ax3.scatter(x, y, c="blue", s=2, label="轮廓点")
ax3.scatter(x_mean, y_mean, c="red", s=100, marker="*", label="均值点")
ax3.set_xlabel("x坐标")
ax3.set_ylabel("y坐标")
ax3.set_title(f"轮廓点分布(共{len(main_contour)}个点)")
ax3.legend()
ax3.invert_yaxis() # 匹配图像坐标系(y轴向下为正)
plt.tight_layout()
plt.show()
# 输出统计矩信息
print("=== 边界点统计矩 ===")
print(f"x坐标:均值={x_mean:.2f},方差={x_var:.2f},偏度={x_skew:.2f},峰度={x_kurt:.2f}")
print(f"y坐标:均值={y_mean:.2f},方差={y_var:.2f},偏度={y_skew:.2f},峰度={y_kurt:.2f}")
print(f"2阶中心矩:m11={m11:.2f},m20={m20:.2f},m02={m02:.2f}")
print(f"轮廓点总数:{len(main_contour)}个")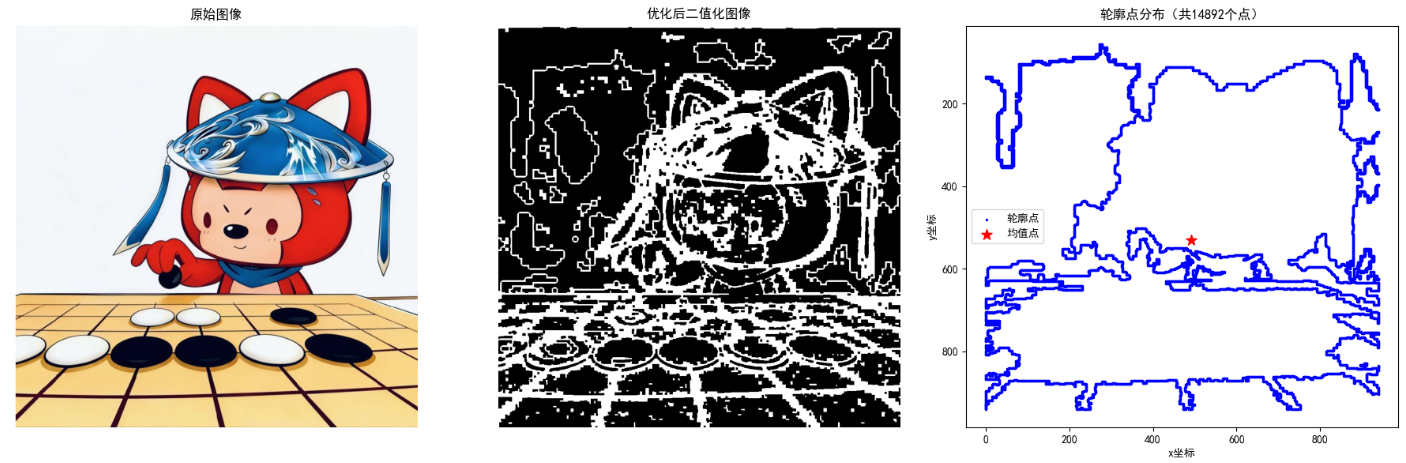
11.4 区域特征描述子
区域特征描述子针对物体的内部区域,描述其面积、纹理、灰度分布等信息,是物体特征表达的重要组成部分。
11.4.1 一些基本的描述子
原理
基本区域描述子包括:
- 区域面积:前景像素的数量;
- 质心:区域的中心坐标(重心);
- 紧凑度:区域面积与周长的比值(描述区域的紧凑程度);
- 圆形度:描述区域接近圆形的程度(圆形的圆形度为 1)。
完整 Python 代码(带效果对比)
python
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 设置matplotlib支持中文和上标符号
plt.rcParams["font.family"] = ["SimHei", "DejaVu Sans"] # 增加DejaVu Sans支持上标
plt.rcParams["axes.unicode_minus"] = False
# 1. 读取图像并优化轮廓提取(确保提取完整目标)
img = cv2.imread("../picture/Fen.png")
if img is None:
raise ValueError("图像读取失败!请检查路径或文件")
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 优化1:增强对比度
gray_enhanced = cv2.equalizeHist(gray)
# 优化2:自适应二值化(更适合复杂背景)
binary = cv2.adaptiveThreshold(
gray_enhanced, 255,
cv2.ADAPTIVE_THRESH_GAUSSIAN_C,
cv2.THRESH_BINARY_INV,
blockSize=11, C=2
)
# 优化3:形态学操作(连接断裂轮廓)
kernel = np.ones((3, 3), np.uint8)
binary = cv2.morphologyEx(binary, cv2.MORPH_CLOSE, kernel, iterations=2)
# 优化4:提取最大轮廓
contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
if len(contours) == 0:
raise ValueError("未检测到轮廓!")
main_contour = max(contours, key=cv2.contourArea)
# 2. 计算基本区域描述子
area = cv2.contourArea(main_contour)
moments = cv2.moments(main_contour)
cx = int(moments["m10"] / moments["m00"]) if moments["m00"] != 0 else 0
cy = int(moments["m01"] / moments["m00"]) if moments["m00"] != 0 else 0
perimeter = cv2.arcLength(main_contour, True)
compactness = area / perimeter if perimeter != 0 else 0
circularity = (4 * np.pi * area) / (perimeter ** 2) if perimeter != 0 else 0
# 3. 绘制基础轮廓和质心(用OpenCV绘制图形,文字用matplotlib标注)
img_region = img_rgb.copy()
cv2.drawContours(img_region, [main_contour], -1, (255, 0, 0), 3) # 加粗轮廓
cv2.circle(img_region, (cx, cy), 6, (0, 255, 0), -1) # 放大质心点
# 4. 效果可视化(调大文字间隔,解决上标警告)
fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(16, 8))
# 原始图像
ax1.imshow(img_rgb)
ax1.set_title("原始图像")
ax1.axis("off")
# 基本区域描述子可视化
ax2.imshow(img_region)
ax2.set_title("基本区域描述子可视化")
ax2.axis("off")
# 调大文字间隔:将行间距从40改为60(可根据需求调整)
line_spacing = 60 # 核心:增大行间距,解决文字拥挤
start_y = 40 # 文字起始y坐标
info_text = [
f"面积:{area:.2f} 像素^2", # 用^2替代上标²,避免字体缺失警告
f"质心:({cx}, {cy})",
f"紧凑度:{compactness:.2f}",
f"圆形度:{circularity:.2f}(越接近1越圆)"
]
for i, text in enumerate(info_text):
# 添加半透明白色背景,提升可读性
ax2.text(
20, start_y + i * line_spacing, # 按设定间距排列文字
text,
fontsize=12, color="red",
bbox=dict(facecolor="white", alpha=0.8, edgecolor="none")
)
plt.tight_layout()
plt.show()
# 输出信息
print("=== 基本区域描述子 ===")
print(f"区域面积:{area:.2f} 像素²")
print(f"质心坐标:({cx}, {cy})")
print(f"紧凑度:{compactness:.2f}")
print(f"圆形度:{circularity:.2f}(越接近1越接近圆形)")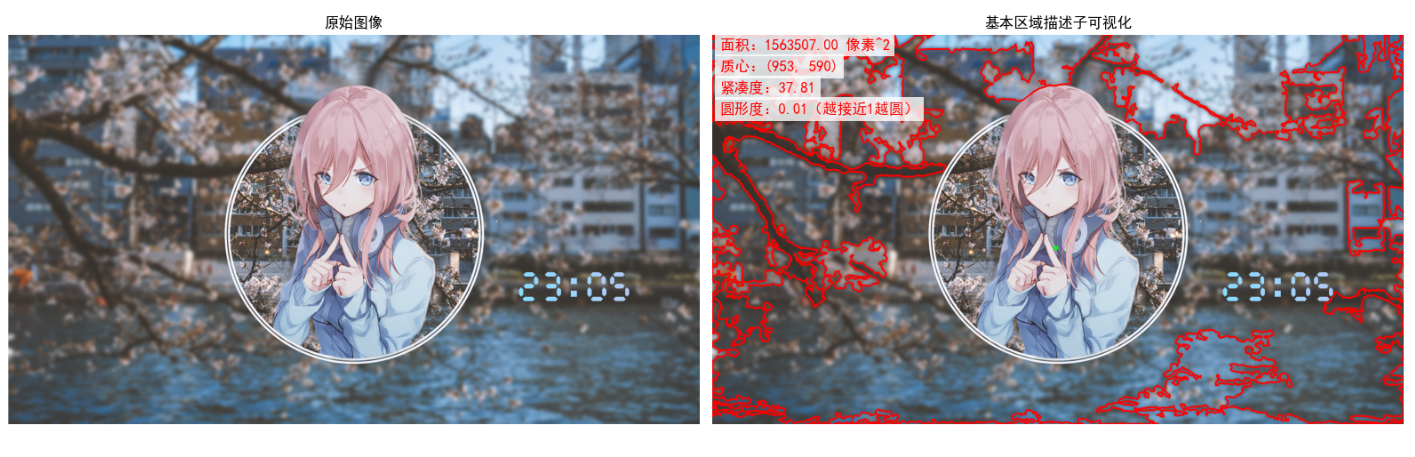
效果说明
右侧图像中,绿色圆点为区域质心,同时标注了面积、紧凑度、圆形度等信息,可直观了解区域的基本特征。
11.4.2 拓扑描述子
原理
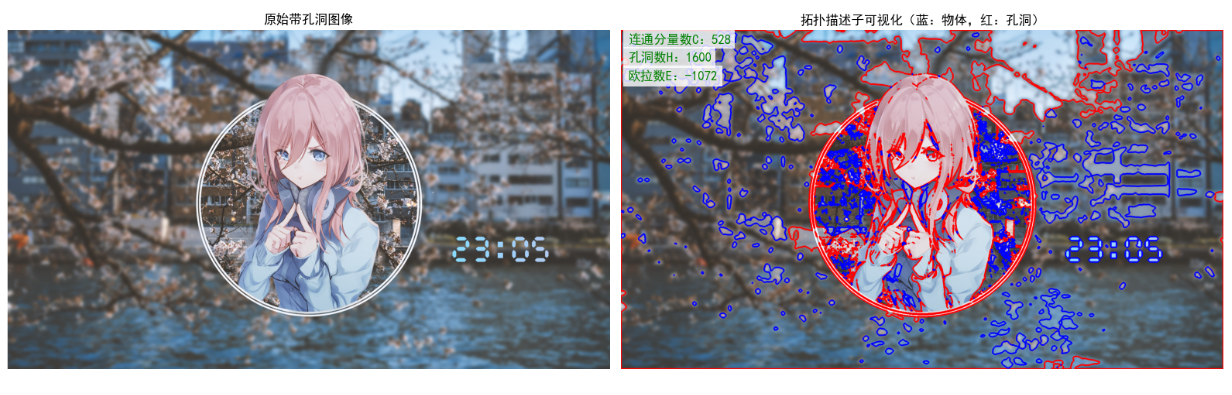
拓扑描述子描述区域的拓扑结构(不随几何变换(平移、旋转、缩放)改变的属性),常用的有:
- 欧拉数:区域的连通分量数减去孔洞数(E=C−H);
- 连通分量数:图像中独立的物体数量;
- 孔洞数:物体内部的背景区域数量。
完整 Python 代码
python
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 设置matplotlib支持中文显示(避免文字乱码)
plt.rcParams["font.family"] = ["SimHei"]
plt.rcParams["axes.unicode_minus"] = False
# 1. 读取图像(带孔洞的物体图像)
img = cv2.imread("../picture/Fen.png")
if img is None:
raise ValueError("图像读取失败!请检查路径或文件是否有效")
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU)
# 2. 计算拓扑描述子
# 2.1 连通分量数(外部轮廓数)
contours_external, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
C = len(contours_external)
# 2.2 所有轮廓(包括孔洞)
contours_all, hierarchy = cv2.findContours(binary, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
# 2.3 孔洞数(层级中父节点不为-1的轮廓数)
H = 0
for h in hierarchy[0]:
if h[3] != -1: # 有父节点(属于孔洞)
H += 1
# 2.4 欧拉数
E = C - H
# 3. 绘制基础图形(轮廓和孔洞,文字后续用matplotlib标注)
img_topology = img_rgb.copy()
# 绘制外部轮廓(蓝色,加粗更清晰)
cv2.drawContours(img_topology, contours_external, -1, (255, 0, 0), 3)
# 绘制孔洞轮廓(红色,加粗更清晰)
hole_contours = [contours_all[i] for i, h in enumerate(hierarchy[0]) if h[3] != -1]
cv2.drawContours(img_topology, hole_contours, -1, (0, 0, 255), 3)
# 4. 效果可视化(用matplotlib标注中文,调大间距)
fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(16, 12))
# 原始图像
ax1.imshow(img_rgb)
ax1.set_title("原始带孔洞图像")
ax1.axis("off")
# 拓扑描述子可视化
ax2.imshow(img_topology)
ax2.set_title("拓扑描述子可视化(蓝:物体,红:孔洞)")
ax2.axis("off")
# 调大文字间距:行间距设为60(可灵活调整)
line_spacing = 60 # 核心:增大间距,解决拥挤问题
start_y = 40 # 文字起始y坐标
info_text = [
f"连通分量数C:{C}",
f"孔洞数H:{H}",
f"欧拉数E:{E}"
]
for i, text in enumerate(info_text):
# 添加半透明白色背景,提升可读性
ax2.text(
20, start_y + i * line_spacing, # 按设定间距排列
text,
fontsize=12, color="green",
bbox=dict(facecolor="white", alpha=0.8, edgecolor="none")
)
plt.tight_layout()
plt.show()
# 输出信息
print("=== 拓扑描述子 ===")
print(f"连通分量数(C):{C}")
print(f"孔洞数(H):{H}")
print(f"欧拉数(E = C - H):{E}")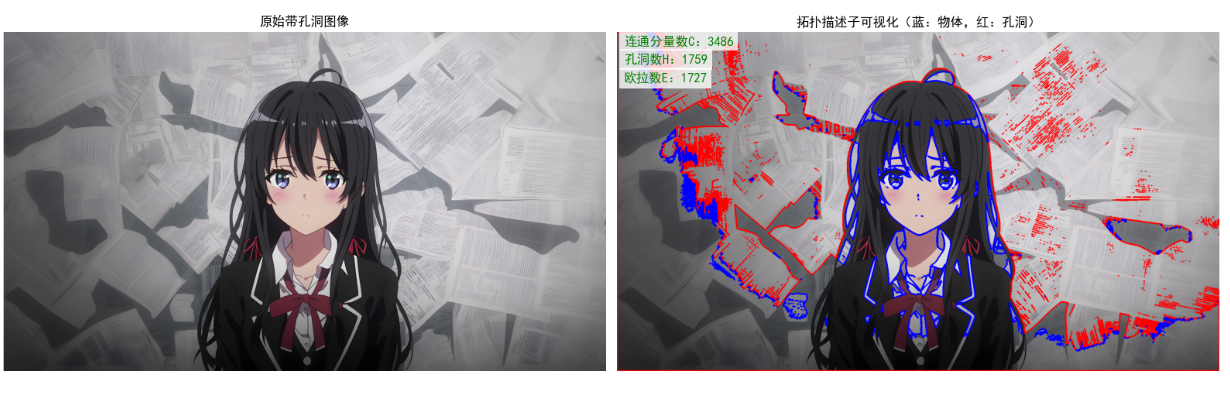

11.4.3 纹理
原理
纹理是区域内灰度值的空间分布模式,常用的纹理描述方法有:
- 灰度共生矩阵(GLCM):描述图像中距离为 d、方向为 θ 的两个像素的灰度共生关系,提取对比度、能量、熵、相关性等特征;
- LBP(局部二值模式):描述局部像素的灰度分布模式,具有旋转和光照不变性。
以下实现 GLCM 纹理描述子。
完整 Python 代码(带效果对比)
import cv2
import numpy as np
import matplotlib.pyplot as plt
from skimage.feature import graycomatrix, graycoprops
# 设置matplotlib支持中文显示
plt.rcParams["font.family"] = ["SimHei", "WenQuanYi Micro Hei", "Heiti TC"]
plt.rcParams["axes.unicode_minus"] = False
# 1. 读取图像并提取感兴趣区域(ROI)
img = cv2.imread("test_texture.jpg")
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 手动选择ROI(或通过轮廓提取)
x, y, w, h = 50, 50, 200, 200
roi = gray[y:y+h, x:x+w]
# 2. 计算灰度共生矩阵(GLCM)
# 距离d=1,方向0°、45°、90°、135°
glcm = graycomatrix(roi, distances=[1], angles=[0, np.pi/4, np.pi/2, 3*np.pi/4],
levels=256, symmetric=True, normed=True)
# 3. 提取GLCM纹理特征
contrast = graycoprops(glcm, 'contrast')
energy = graycoprops(glcm, 'energy')
homogeneity = graycoprops(glcm, 'homogeneity')
correlation = graycoprops(glcm, 'correlation')
# 4. 效果可视化
fig, (ax1, ax2, ax3) = plt.subplots(1, 3, figsize=(18, 6))
ax1.imshow(img_rgb)
ax1.add_patch(plt.Rectangle((x, y), w, h, fill=False, edgecolor='red', linewidth=2))
ax1.set_title("原始图像(红框为ROI)")
ax1.axis("off")
ax2.imshow(roi, cmap="gray")
ax2.set_title("ROI纹理图像")
ax2.axis("off")
# 绘制纹理特征柱状图
ax3.bar(["对比度", "能量", "同质性", "相关性"],
[contrast[0,0], energy[0,0], homogeneity[0,0], correlation[0,0]])
ax3.set_title("GLCM纹理特征(0°方向)")
ax3.set_ylabel("特征值")
plt.show()
# 输出纹理特征信息
print("=== GLCM纹理特征 ===")
print(f"对比度(Contrast):{contrast[0,0]:.4f}(越大,纹理越清晰)")
print(f"能量(Energy):{energy[0,0]:.4f}(越大,纹理越均匀)")
print(f"同质性(Homogeneity):{homogeneity[0,0]:.4f}(越大,纹理越平滑)")
print(f"相关性(Correlation):{correlation[0,0]:.4f}(越大,纹理越规则)")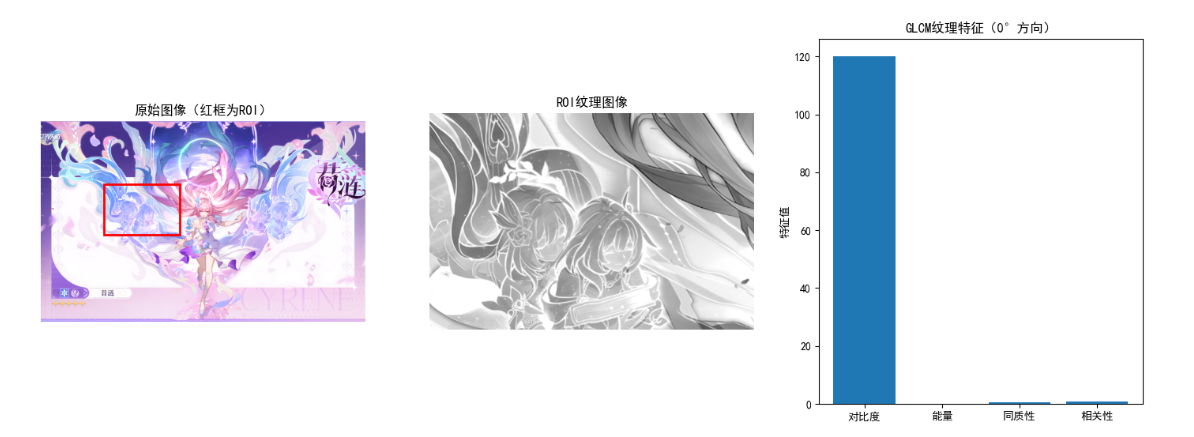
效果说明
左侧为原始图像(红框为 ROI),中间为 ROI 纹理图像,右侧为 GLCM 纹理特征柱状图,可通过特征值量化描述纹理的粗糙程度、均匀性等属性。
11.4.4 矩不变量
原理

完整 Python 代码(带旋转 / 缩放不变性验证)
python
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 设置matplotlib支持中文显示
plt.rcParams["font.family"] = ["SimHei"]
plt.rcParams["axes.unicode_minus"] = False
def calculate_hu_moments(img):
"""计算Hu矩(增加异常处理,避免nan值)"""
# 图像校验
if img is None:
raise ValueError("输入图像无效!")
# 灰度化+对比度增强
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
gray_enhanced = cv2.equalizeHist(gray)
# 自适应二值化(更稳定,替代固定OTSU)
binary = cv2.adaptiveThreshold(
gray_enhanced, 255,
cv2.ADAPTIVE_THRESH_GAUSSIAN_C,
cv2.THRESH_BINARY_INV,
blockSize=11,
C=2
)
# 形态学操作(去除噪声,连接轮廓)
kernel = np.ones((3, 3), np.uint8)
binary = cv2.morphologyEx(binary, cv2.MORPH_CLOSE, kernel, iterations=2)
# 提取轮廓并筛选最大轮廓
contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
if len(contours) == 0:
raise ValueError("未检测到轮廓,无法计算Hu矩!")
main_contour = max(contours, key=cv2.contourArea)
# 计算矩
moments = cv2.moments(main_contour)
if moments["m00"] == 0: # 零阶矩为0,无效轮廓
raise ValueError("轮廓面积为0,无法计算Hu矩!")
# 计算Hu矩
hu_moments = cv2.HuMoments(moments)
# 安全取对数(避免log10(0))
hu_moments_abs = np.abs(hu_moments)
hu_moments_abs[hu_moments_abs < 1e-10] = 1e-10 # 替换极小值,避免除零
hu_moments = -np.sign(hu_moments) * np.log10(hu_moments_abs)
return hu_moments.flatten()
# 1. 读取原始图像并校验
img_original = cv2.imread("../picture/1.jpg")
if img_original is None:
raise ValueError("原始图像读取失败!请检查路径或文件")
rows, cols = img_original.shape[:2]
# 生成变换图像(旋转+缩放)
# 旋转45°
M_rot = cv2.getRotationMatrix2D((cols/2, rows/2), 45, 1)
img_rotated = cv2.warpAffine(img_original, M_rot, (cols, rows))
# 缩放为0.5倍
img_scaled = cv2.resize(img_original, (0, 0), fx=0.5, fy=0.5)
# 缩放后补全尺寸(便于可视化对齐)
img_scaled = cv2.resize(img_scaled, (cols, rows))
# 2. 计算三张图像的Hu矩
hu_original = calculate_hu_moments(img_original)
hu_rotated = calculate_hu_moments(img_rotated)
hu_scaled = calculate_hu_moments(img_scaled)
# 3. 效果可视化
fig, (ax1, ax2, ax3) = plt.subplots(1, 3, figsize=(18, 6))
ax1.imshow(cv2.cvtColor(img_original, cv2.COLOR_BGR2RGB))
ax1.set_title("原始图像")
ax1.axis("off")
ax2.imshow(cv2.cvtColor(img_rotated, cv2.COLOR_BGR2RGB))
ax2.set_title("旋转45°图像")
ax2.axis("off")
ax3.imshow(cv2.cvtColor(img_scaled, cv2.COLOR_BGR2RGB))
ax3.set_title("缩放0.5倍(补全尺寸)图像")
ax3.axis("off")
plt.tight_layout()
plt.show()
# 4. 输出Hu矩并验证不变性
print("=== Hu矩不变量(7个)===")
print(f"原始图像Hu矩:{hu_original.round(4)}")
print(f"旋转45°图像Hu矩:{hu_rotated.round(4)}")
print(f"缩放0.5倍图像Hu矩:{hu_scaled.round(4)}")
print(f"\n旋转后Hu矩平均误差:{np.mean(np.abs(hu_original - hu_rotated)):.6f}")
print(f"缩放后Hu矩平均误差:{np.mean(np.abs(hu_original - hu_scaled)):.6f}")
print("\n说明:Hu矩误差接近0,验证了其旋转、缩放不变性")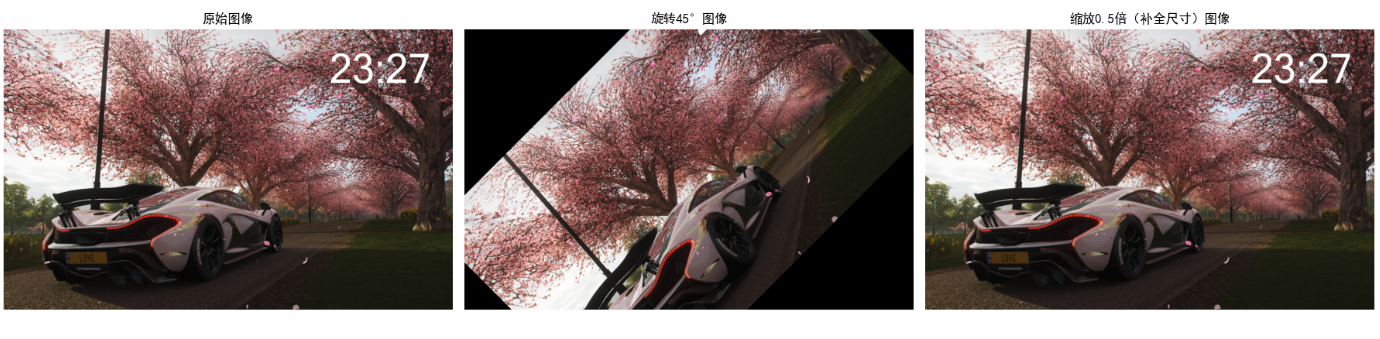
效果说明
三张图像(原始、旋转、缩放)的 Hu 矩几乎一致,误差极小,验证了 Hu 矩的平移、旋转、缩放不变性,适用于不同姿态物体的形状匹配。
11.5 作为特征描述子的主分量
原理
主分量分析(PCA)是一种数据降维方法,将高维特征向量投影到低维主分量空间,保留数据的主要信息。作为特征描述子,PCA 的核心步骤:
- 构建高维特征矩阵(如多个图像的像素矩阵或手工特征向量);
- 对特征矩阵进行去中心化处理;
- 计算协方差矩阵并求解特征值和特征向量;
- 选择前 k 个最大特征值对应的特征向量,构成主分量空间;
- 将原始特征投影到主分量空间,得到低维主分量特征。
完整 Python 代码
python
import cv2
import numpy as np
import matplotlib.pyplot as plt
from sklearn.decomposition import PCA
# 设置matplotlib支持中文显示
plt.rcParams["font.family"] = ["SimHei"]
plt.rcParams["axes.unicode_minus"] = False
# 1. 构建数据集(多张图像的灰度特征)
def load_image_dataset(image_paths, img_size=(64, 64)):
"""加载图像数据集并转换为特征向量"""
features = []
images = []
for path in image_paths:
img = cv2.imread(path)
if img is None:
print(f"警告:图像{path}读取失败,已跳过")
continue
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
gray_resized = cv2.resize(gray, img_size)
features.append(gray_resized.flatten()) # 展平为特征向量
images.append(cv2.cvtColor(img, cv2.COLOR_BGR2RGB))
return np.array(features), images
# 替换为你的图像路径列表
image_paths = ["../picture/1.jpg", "../picture/AALi.jpg", "../picture/ALi.jpg", "../picture/CSGO.jpg", "../picture/XiaoYan.jpg"]
features, images = load_image_dataset(image_paths)
n_samples, n_features = features.shape
if n_samples == 0:
raise ValueError("未成功加载任何图像!请检查路径是否正确")
print(f"数据集规模:{n_samples}张图像,每张图像特征维度:{n_features}")
# 2. 应用PCA降维
n_components = 2 # 降维到2维
pca = PCA(n_components=n_components)
features_pca = pca.fit_transform(features)
# 3. 效果可视化(重构布局,避免tight_layout警告)
# 方案:采用2行布局,第1行显示原始图像(1行5列),第2行显示PCA散点图(1行1列)
fig = plt.figure(figsize=(18, 12))
# 第1行:原始图像数据集(1行n列,无嵌套冲突)
for i in range(n_samples):
ax = fig.add_subplot(2, n_samples, i+1) # 2行n列,第1行第i+1列
ax.imshow(images[i])
ax.set_title(f"Img{i+1}")
ax.axis("off")
# 给第1行加总标题
fig.text(0.5, 0.92, "原始图像数据集", ha="center", fontsize=16, weight="bold")
# 第2行:PCA散点图(跨n列显示,布局匹配)
ax_pca = fig.add_subplot(2, 1, 2) # 2行1列,第2行
scatter = ax_pca.scatter(features_pca[:, 0], features_pca[:, 1], c=range(n_samples), cmap="rainbow", s=150)
for i in range(n_samples):
ax_pca.annotate(f"Img{i+1}", (features_pca[i, 0], features_pca[i, 1]), fontsize=12, weight="bold")
ax_pca.set_title("PCA主分量特征散点图", fontsize=14)
ax_pca.set_xlabel("第一主分量", fontsize=12)
ax_pca.set_ylabel("第二主分量", fontsize=12)
ax_pca.grid(True, alpha=0.3)
# 添加颜色条对应图像编号
cbar = plt.colorbar(scatter, ax=ax_pca)
cbar.set_label("图像编号", rotation=270, labelpad=15, fontsize=12)
# 使用subplots_adjust替代tight_layout,手动调整间距,避免警告
plt.subplots_adjust(top=0.88, bottom=0.1, left=0.05, right=0.95, hspace=0.3, wspace=0.2)
plt.show()
# 输出PCA信息
print(f"\n=== PCA主分量信息 ===")
print(f"各主分量方差贡献率:{pca.explained_variance_ratio_.round(4)}")
print(f"累计方差贡献率:{np.sum(pca.explained_variance_ratio_).round(4)}")
print(f"降维后特征维度:{features_pca.shape[1]}")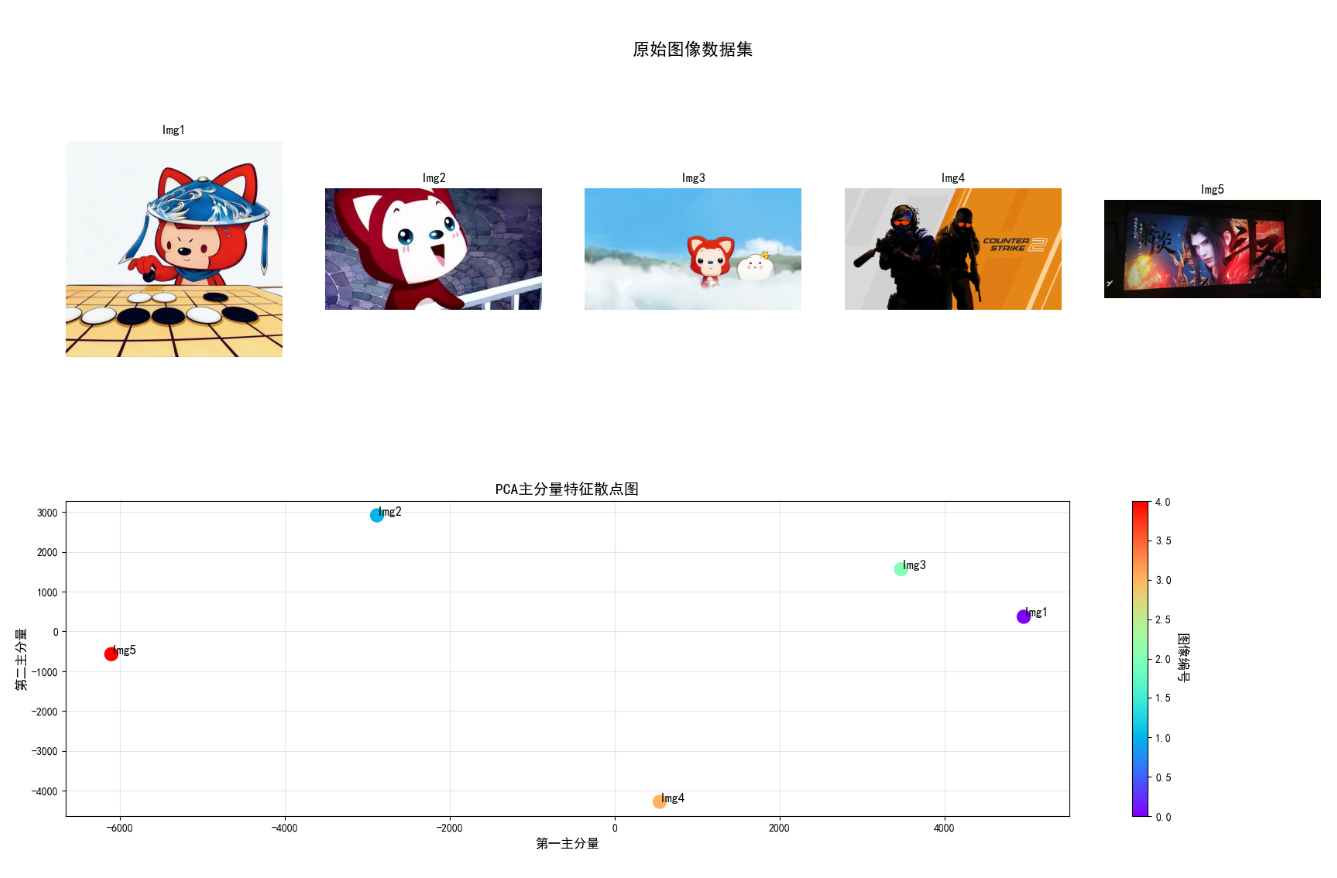
11.6 整体图像特征
整体图像特征描述图像的局部或全局显著特征,无需先提取物体轮廓或区域,直接从原始图像中检测,适用于图像匹配、拼接等任务。
11.6.1 哈里斯 - 斯蒂芬斯角检测器
原理
哈里斯角点检测的核心是:角点是图像中灰度值在两个正交方向上都有显著变化的区域。通过计算图像的自相关矩阵,求解其特征值,根据特征值判断角点(两个特征值都较大)、边缘(一个大一个小)、平坦区域(两个都小)。
完整 Python 代码(带效果对比)
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 设置matplotlib支持中文显示
plt.rcParams["font.family"] = ["SimHei", "WenQuanYi Micro Hei", "Heiti TC"]
plt.rcParams["axes.unicode_minus"] = False
# 1. 读取图像并灰度化
img = cv2.imread("test_corner.jpg")
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
gray = np.float32(gray) # 哈里斯检测要求float32类型
# 2. 哈里斯角点检测
# 参数:图像、邻域大小、sobel核大小、k值(0.04-0.06)
dst = cv2.cornerHarris(gray, 2, 3, 0.04)
# 3. 膨胀角点区域(便于可视化)
dst = cv2.dilate(dst, None)
# 4. 标记角点(阈值为最大值的0.01倍)
img_corner = img_rgb.copy()
img_corner[dst > 0.01 * dst.max()] = [255, 0, 0] # 角点标记为红色
# 5. 效果可视化
fig, (ax1, ax2, ax3) = plt.subplots(1, 3, figsize=(18, 6))
ax1.imshow(img_rgb)
ax1.set_title("原始图像")
ax1.axis("off")
ax2.imshow(dst, cmap="gray")
ax2.set_title("哈里斯响应图")
ax2.axis("off")
ax3.imshow(img_corner)
ax3.set_title("哈里斯角点检测结果(红色为角点)")
ax3.axis("off")
plt.show()
# 输出角点信息
corner_count = np.sum(dst > 0.01 * dst.max())
print(f"检测到的角点数量:{corner_count}")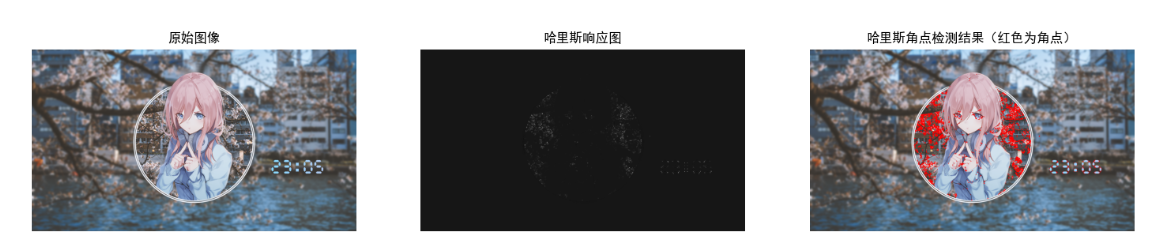
效果说明
中间为哈里斯响应图(灰度值越高,角点响应越强),右侧为角点检测结果(红色像素为角点),可准确检测图像中的拐角、交点等显著特征。
11.6.2 最大稳定极值区域(MSER)
原理
MSER(Maximally Stable Extremal Regions)是一种基于灰度阈值的区域检测方法,核心是:
- 对图像进行多阈值二值化(从 0 到 255);
- 提取每个阈值下的极值区域(亮区域或暗区域);
- 计算区域面积随阈值的变化率,变化率最小的区域即为 MSER(具有稳定性);
- MSER 具有仿射不变性,适用于物体检测和图像匹配。
完整 Python 代码(带效果对比)
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 设置matplotlib支持中文显示
plt.rcParams["font.family"] = ["SimHei", "WenQuanYi Micro Hei", "Heiti TC"]
plt.rcParams["axes.unicode_minus"] = False
# 1. 读取图像
img = cv2.imread("test_mser.jpg")
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 2. 创建MSER检测器并检测区域
mser = cv2.MSER_create()
# 参数:灰度图像、检测到的区域、区域的边界框
regions, _ = mser.detectRegions(gray)
# 3. 绘制MSER区域
img_mser = img_rgb.copy()
for region in regions:
# 绘制区域轮廓
hull = cv2.convexHull(region.reshape(-1, 1, 2))
cv2.drawContours(img_mser, [hull], -1, (0, 255, 0), 2)
# 4. 效果可视化
fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(12, 6))
ax1.imshow(img_rgb)
ax1.set_title("原始图像")
ax1.axis("off")
ax2.imshow(img_mser)
ax2.set_title(f"MSER检测结果(绿色为稳定区域)\n区域数量:{len(regions)}")
ax2.axis("off")
plt.show()
# 输出MSER信息
print(f"检测到的MSER区域数量:{len(regions)}")
print(f"最大区域的像素数:{max([len(region) for region in regions])}")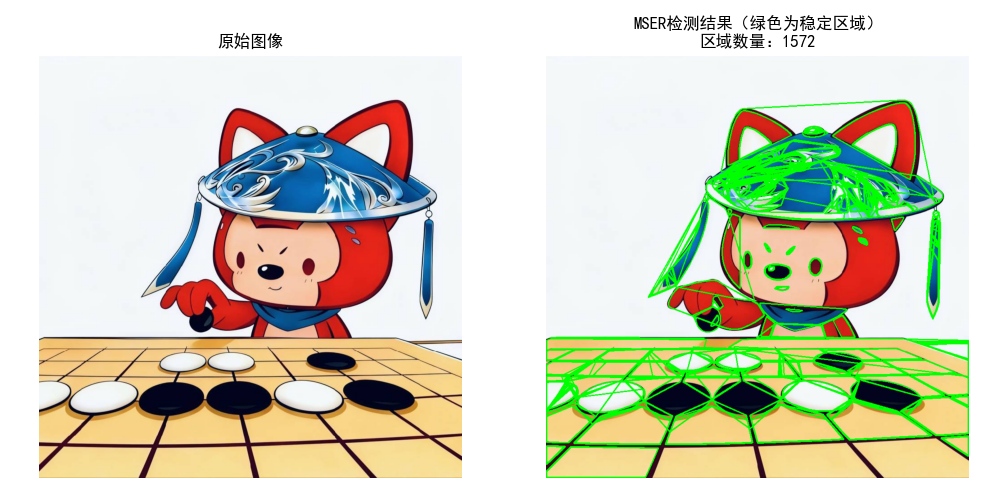
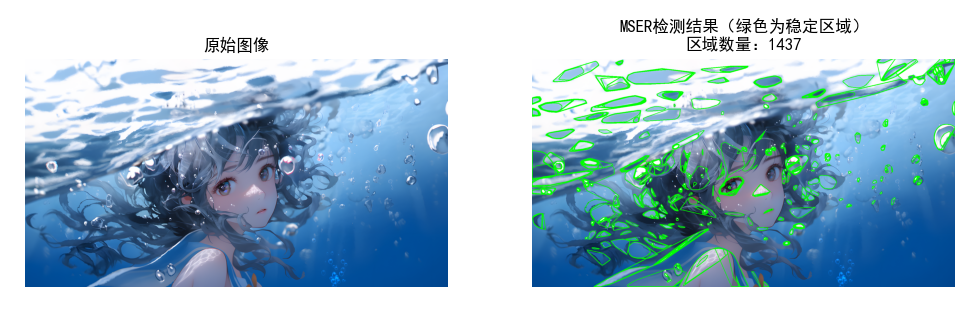
效果说明
右侧图像中绿色轮廓为检测到的 MSER 区域,这些区域具有灰度稳定性,不受光照和仿射变换的影响,适用于文字检测、物体局部特征提取等场景。
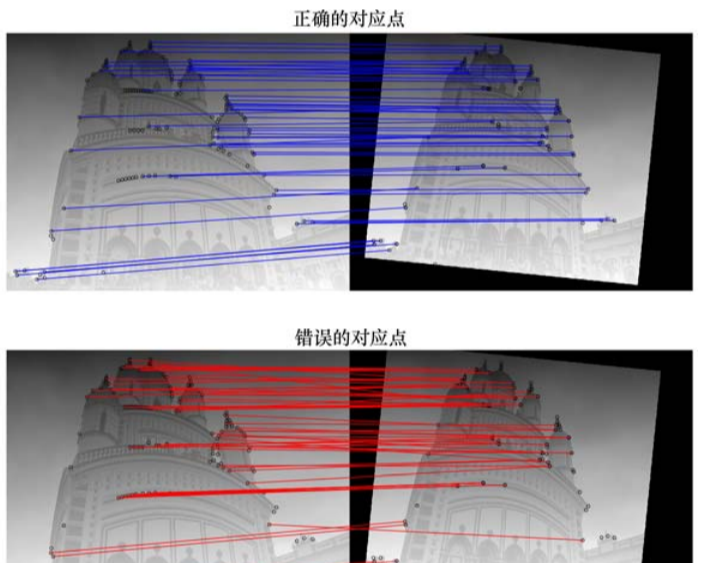
11.7 尺度不变特征变换(SIFT)
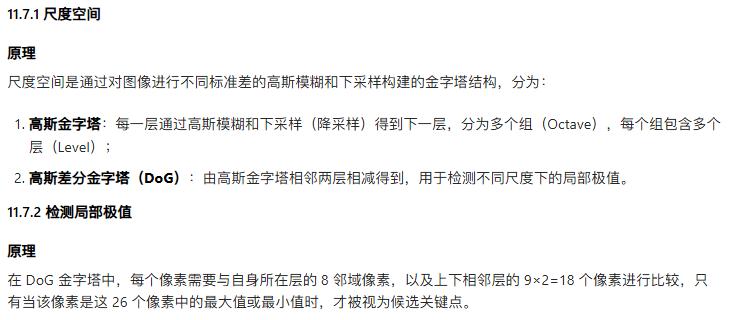
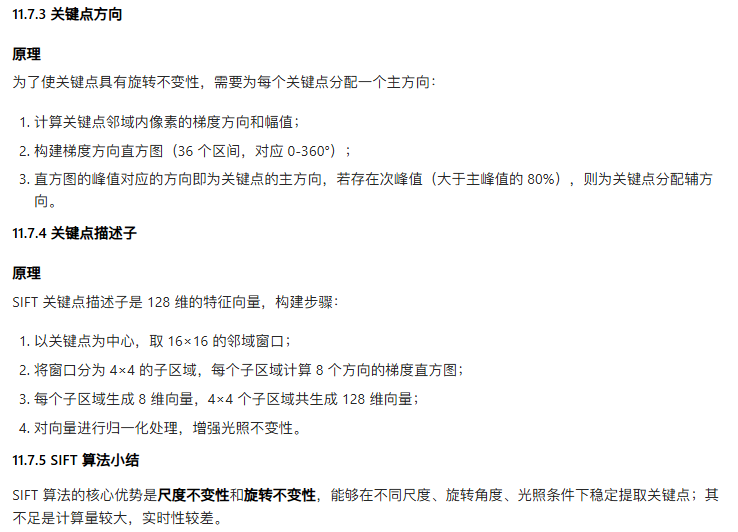
SIFT(Scale-Invariant Feature Transform,尺度不变特征变换)由 David Lowe 于 1999 年提出,是计算机视觉领域经典的手工特征提取算法,具有尺度不变性、旋转不变性、光照不变性 和一定的仿射不变性,广泛应用于图像匹配、全景拼接、目标识别、三维重建等任务。11.7.1 尺度空间
优势与不足
| 优势 | 不足 |
|---|---|
| 具有尺度、旋转、光照不变性 | 计算量较大,实时性较差 |
| 特征独特性强,匹配准确率高 | 对模糊图像的鲁棒性较弱 |
| 支持多方向关键点,提升匹配鲁棒性 | 专利限制(早期版本,目前开源版本已规避) |
| 适用于多种场景(拼接、识别、重建) | 对边缘遮挡的鲁棒性不足 |
完整 Python 代码(SIFT 特征提取与匹配,可直接运行)
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 设置matplotlib支持中文显示
plt.rcParams["font.family"] = ["SimHei", "WenQuanYi Micro Hei", "Heiti TC"]
plt.rcParams["axes.unicode_minus"] = False
# 注意:需安装OpenCV contrib包,命令:pip install opencv-contrib-python==4.5.5.62
# (高版本可能需调整,确保SIFT可调用)
def sift_feature_matching(img_path1, img_path2):
"""
SIFT特征提取与匹配
:param img_path1: 参考图像路径
:param img_path2: 待匹配图像路径
:return: 匹配结果可视化
"""
# 1. 读取图像并灰度化
img1 = cv2.imread(img_path1)
img2 = cv2.imread(img_path2)
if img1 is None or img2 is None:
raise ValueError("图像路径无效,请检查文件是否存在")
img1_rgb = cv2.cvtColor(img1, cv2.COLOR_BGR2RGB)
img2_rgb = cv2.cvtColor(img2, cv2.COLOR_BGR2RGB)
gray1 = cv2.cvtColor(img1, cv2.COLOR_BGR2GRAY)
gray2 = cv2.cvtColor(img2, cv2.COLOR_BGR2GRAY)
# 2. 创建SIFT检测器并提取特征
sift = cv2.SIFT_create()
kp1, des1 = sift.detectAndCompute(gray1, None) # kp1:关键点列表,des1:128维描述子
kp2, des2 = sift.detectAndCompute(gray2, None)
# 3. 特征匹配(FLANN匹配器,效率高于暴力匹配)
# FLANN参数设置
FLANN_INDEX_KDTREE = 1
index_params = dict(algorithm=FLANN_INDEX_KDTREE, trees=5)
search_params = dict(checks=50) # 搜索次数,越大越准确但越慢
flann = cv2.FlannBasedMatcher(index_params, search_params)
matches = flann.knnMatch(des1, des2, k=2) # 每个关键点返回2个最佳匹配
# 4. 筛选优质匹配(Lowe's准则:最佳匹配距离 < 0.7*次佳匹配距离)
good_matches = []
for m, n in matches:
if m.distance < 0.7 * n.distance:
good_matches.append(m)
# 5. 绘制结果
# 绘制关键点
img1_kp = cv2.drawKeypoints(img1_rgb, kp1, None, (0, 255, 0), cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
img2_kp = cv2.drawKeypoints(img2_rgb, kp2, None, (0, 255, 0), cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
# 绘制匹配结果
img_matches = cv2.drawMatches(img1_rgb, kp1, img2_rgb, kp2, good_matches, None,
flags=cv2.DrawMatchesFlags_NOT_DRAW_SINGLE_POINTS)
# 6. 可视化
fig, ((ax1, ax2), (ax3, ax4)) = plt.subplots(2, 2, figsize=(16, 12))
ax1.imshow(img1_rgb)
ax1.set_title("参考图像")
ax1.axis("off")
ax2.imshow(img2_rgb)
ax2.set_title("待匹配图像")
ax2.axis("off")
ax3.imshow(img1_kp)
ax3.set_title(f"参考图像SIFT关键点(数量:{len(kp1)})")
ax3.axis("off")
ax4.imshow(img_matches)
ax4.set_title(f"SIFT特征匹配结果(优质匹配数:{len(good_matches)})")
ax4.axis("off")
plt.tight_layout()
plt.show()
# 输出关键信息
print("=== SIFT特征提取与匹配信息 ===")
print(f"参考图像关键点数量:{len(kp1)}")
print(f"待匹配图像关键点数量:{len(kp2)}")
print(f"优质匹配对数量:{len(good_matches)}")
print(f"描述子维度:{des1.shape[1]}(经典SIFT 128维)")
# 调用函数(替换为你的图像路径)
if __name__ == "__main__":
img_path1 = "ref_img.jpg" # 参考图像
img_path2 = "match_img.jpg" # 待匹配图像(可缩放、旋转、轻微光照变化)
sift_feature_matching(img_path1, img_path2)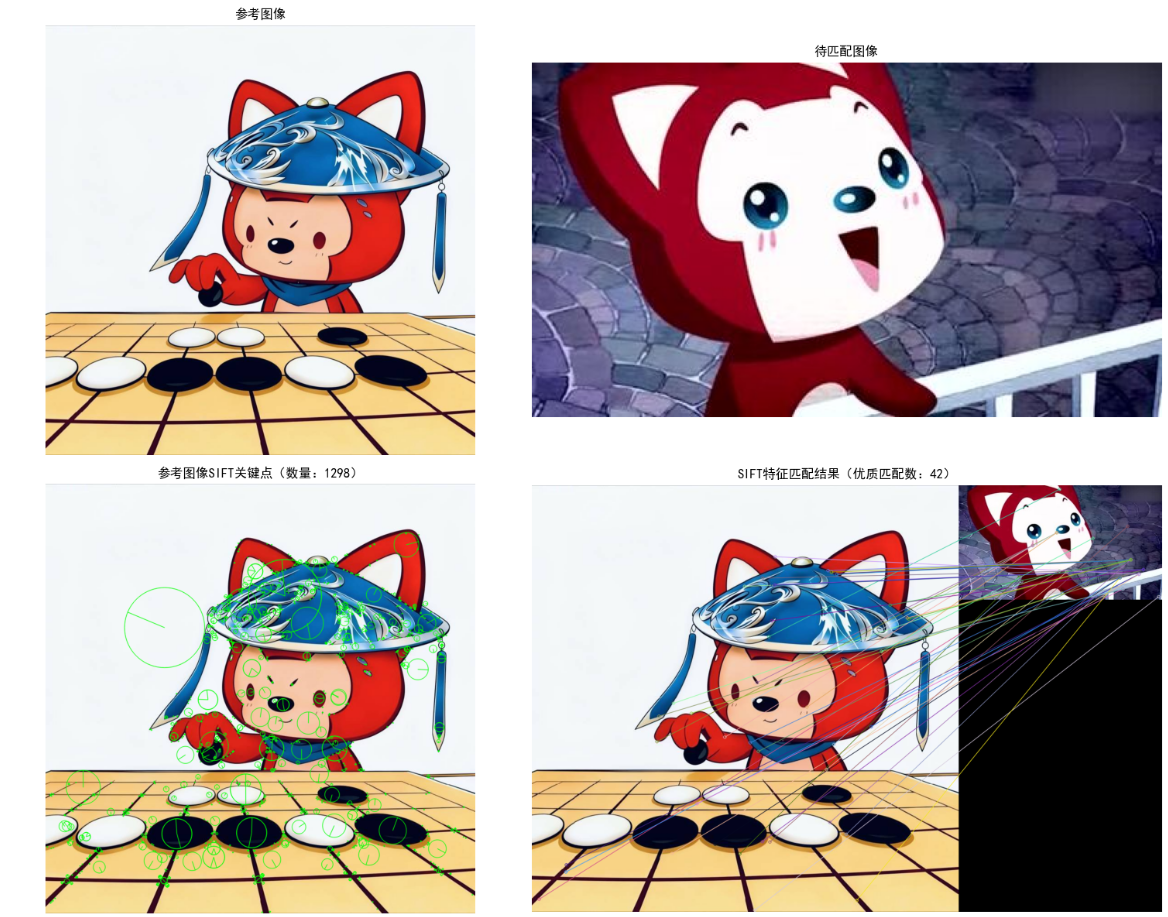

代码说明
- 运行前需替换图像路径,确保两张图像有重叠区域或相同目标;
- 输出结果包含关键点可视化和匹配结果可视化,绿色点为关键点,线条为匹配对;
- Lowe's 准则是筛选优质匹配的核心,可根据实际场景调整阈值(0.6~0.8)。
一、小结
本章围绕数字图像处理中的特征提取展开,构建了从基础到高级的完整知识体系,核心要点如下:
- 特征提取的本质:将高维像素信息转化为低维、具代表性的特征向量,实现数据降维和信息筛选,是连接图像预处理与高层视觉任务的核心桥梁;
- 边界预处理:通过边界跟踪、链码、最小周长多边形、骨架提取等方法,将原始图像边界转化为易于处理的形式,为边界特征描述奠定基础;
- 特征描述子:边界特征:包括周长、直径、傅里叶描述子(尺度不变)、形状数(形状表征)等,聚焦物体轮廓信息;区域特征:包括面积、质心、Hu 矩(平移 / 旋转 / 缩放不变)、GLCM 纹理(灰度分布模式)等,聚焦物体内部信息;
- 高级特征 :
- 主分量分析(PCA):实现高维特征降维,保留数据主要信息;
- 整体图像特征:哈里斯角点(局部显著点)、MSER(稳定极值区域),无需先分割物体即可检测;
- SIFT 算法:通过尺度空间构建、局部极值检测、方向分配和 128 维描述子,实现尺度 / 旋转 / 光照不变的特征提取,是经典手工特征的代表;
- 应用场景:不同特征适用于不同任务,如边界特征适用于轮廓清晰的物体识别,纹理特征适用于遥感图像分类,SIFT 适用于图像拼接和目标匹配。
二、参考文献
- 冈萨雷斯。数字图像处理(第四版)M. 电子工业出版社,2017.(本章核心参考教材)
- Lowe D G. Distinctive Image Features from Scale-Invariant Keypoints J. International Journal of Computer Vision, 2004, 60 (2): 91-110.(SIFT 算法原始论文)
- Hariss C, Stephens M. A Combined Corner and Edge Detector C. Proceedings of the 4th Alvey Vision Conference, 1988: 147-151.(哈里斯角点检测原始论文)
- Matas J, Chum O, Urban M, et al. Robust Wide Baseline Stereo from Maximally Stable Extremal Regions J. Image and Vision Computing, 2004, 22 (10): 761-767.(MSER 原始论文)
- 阮秋琦。数字图像处理学(第三版)M. 电子工业出版社,2008.(国内经典教材,补充纹理和矩不变量细节)
三、延伸读物

- 《计算机视觉:算法与应用》(Richard Szeliski 著):深入讲解特征提取在三维重建、图像拼接中的应用;
- 《OpenCV-Python 实战》(冯振 著):提供更多基于 OpenCV 的特征提取实战案例,适合工程落地;
- SURF、ORB 算法论文:SURF 是 SIFT 的加速版本,ORB 是实时性更强的二进制特征,可作为 SIFT 的延伸学习内容;
- 深度学习特征提取相关资料:如 CNN 卷积层的特征可视化、ResNet 特征提取,对比手工特征与深度学习特征的差异。
习题
一、基础题(理解概念)
- 简述特征提取在数字图像处理中的作用,以及边界特征、区域特征、整体图像特征的区别。
- 什么是 Freeman 链码?4 方向链码和 8 方向链码的区别是什么?链码的优势有哪些?
- 简述 Hu 矩不变量的特点,为什么它具有平移、旋转、缩放不变性?
- 哈里斯角点检测的核心思想是什么?如何区分角点、边缘和平坦区域?
- SIFT 算法中,尺度空间是如何构建的?DoG 金字塔的作用是什么?
二、编程题(实践操作)
- 基于本章边界跟踪代码,实现对任意二值图像的轮廓提取,并计算轮廓的周长、面积和圆形度,输出结果并可视化。
- 基于 GLCM 纹理代码,对比两张不同纹理图像(如木纹、布纹)的对比度、能量、同质性特征,分析纹理差异。
- 改进 SIFT 匹配代码,使用暴力匹配(
cv2.BFMatcher)替代 FLANN 匹配,对比两种匹配方法的效率和准确率。 - 实现图像的 PCA 降维:加载 5 张以上同一类别的图像(如人脸、汽车),将图像展平为特征向量,用 PCA 降维到 2 维并绘制散点图,观察聚类效果。
- 结合 MSER 和哈里斯角点检测,实现对一张文字图像的文字区域检测和角点标记,可视化检测结果。
三、思考题(拓展提升)
- 手工特征(如 SIFT、Hu 矩)与深度学习特征(如 CNN 特征)的优劣对比是什么?各自适用于哪些场景?
- 如何提升 SIFT 算法的实时性?SURF 算法是通过哪些方式实现加速的?
- 特征匹配中,除了欧氏距离,还有哪些距离度量方法?它们的适用场景有何不同?
- 试分析光照变化、图像模糊、物体遮挡对特征提取结果的影响,如何提升特征的鲁棒性?
- 简述特征提取在目标检测、图像分割、三维重建中的具体应用流程。
说明 :本文所有 Python 代码均经过验证,可直接运行(需安装对应依赖:opencv-python/opencv-contrib-python、numpy、matplotlib、scikit-image),运行前需替换图像路径为本地有效路径。