接收机
ELRS 遥控器/高频头如何与接收机对频 | SpeedyBee 知识库 | 专业FPV穿越机视频教程与常见问题解答,最全新手FPV穿越机调参指南。
ELRS接收机和高频头如何升级固件 | SpeedyBee 知识库 | 专业FPV穿越机视频教程与常见问题解答,最全新手FPV穿越机调参指南。
通道功能
前置学习通道功能,主要英文名称混眼熟。
| 功能类别 | 配置项 | 说明与常见选项 | 备注/应用场景 |
|---|---|---|---|
| 通道映射 | 自定义通道输出 | 通过WiFi网页(如http://10.0.0.1)调整接收机PWM输出通道的映射。 |
例如,将物理通道1映射到输出通道3,适应不同的舵机布局。 |
| 通道输出类型 | PWM输出 :直接驱动舵机、电调。CRSF协议:通过串口与飞控通信,传输所有通道数据及遥测。 | 无飞控的固定翼/小车常用PWM;多旋翼或复杂机型常用CRSF接入飞控。 | |
| 通道分辨率 | 摇杆通道(CH1-CH4) | 通常为10位分辨率(0-1023),提供精细的控制。 | 控制飞行器的姿态、油门等。 |
| 辅助通道(AUX1-AUX12) | 可配置为2值开关 (如1000/2000ms)、3值开关或多位比例控制。 | 用于模式切换、起降、灯光控制等。 | |
| 模式与功能开关 | 解锁(Arm) | 通常映射到一个2段开关(如AUX1),设置一个通道值约为1000时为锁定(disarmed),约2000时为解锁(armed)。 | 安全第一,确保油门低位时才能解锁。 |
| 飞行模式(Flight Mode) | 映射到一个3段开关(如AUX2或CH6),通过飞控地面站(如Betaflight, iNav)为每个档位分配模式。 | 例如:自稳(Stabilize)、定高(Altitude)、定点(Position)。 | |
| 其他功能开关 | 可配置蜂鸣器、LED灯、投掷物释放、相机控制等。 | 根据实际需求自由分配。 | |
| ELRS链路参数 | 发包速率(Packet Rate) | 例如2.4GHz版本可选50, 150, 250, 500Hz 。提高速率 (如500Hz)→ 降低延迟 ,操控更跟手,但距离可能略短。降低速率 (如50Hz)→ 增加距离和抗干扰性,但延迟略增。 | 需要在延迟和距离间权衡。竞速机常用500Hz,远航机可选100Hz或50Hz。 |
| 发射功率(TX Power) | 可调(如100mW, 250mW, 500mW)。动态功率(Dynamic Power):根据信号质量(RSSI)自动调整功率,节省电量且减少辐射。 | 法规遵循:注意所在地区对无线电发射功率的限制。 | |
| 模型匹配 | Model Match | 启用后,接收机只会接收与其模型ID匹配的遥控器信号,防止在场地中多人同频段时的相互干扰。 | 强烈建议启用,尤其在多人飞行场合。 |
| 遥测回传 | 遥测数据 | ELRS支持将接收机端的RSSI(信号强度)、LQ(连接质量)、电池电压等数据回传到遥控器。 | 帮助飞手实时了解链路状态和飞行器电量,提升安全性。 |
| 遥测比例(Telem Ratio) | 设置回传数据与发送指令的比例。 | 平衡上行控制和下行遥测的数据量。 | |
| VTX控制 | VTX管理员(VTX Admin) | 可通过ELRS协议远程设置图传(VTX)的频段、频道和功率。 | 方便在起降区合规使用低功率,飞行时切换高功率,无需手动拨动图传按钮。 |
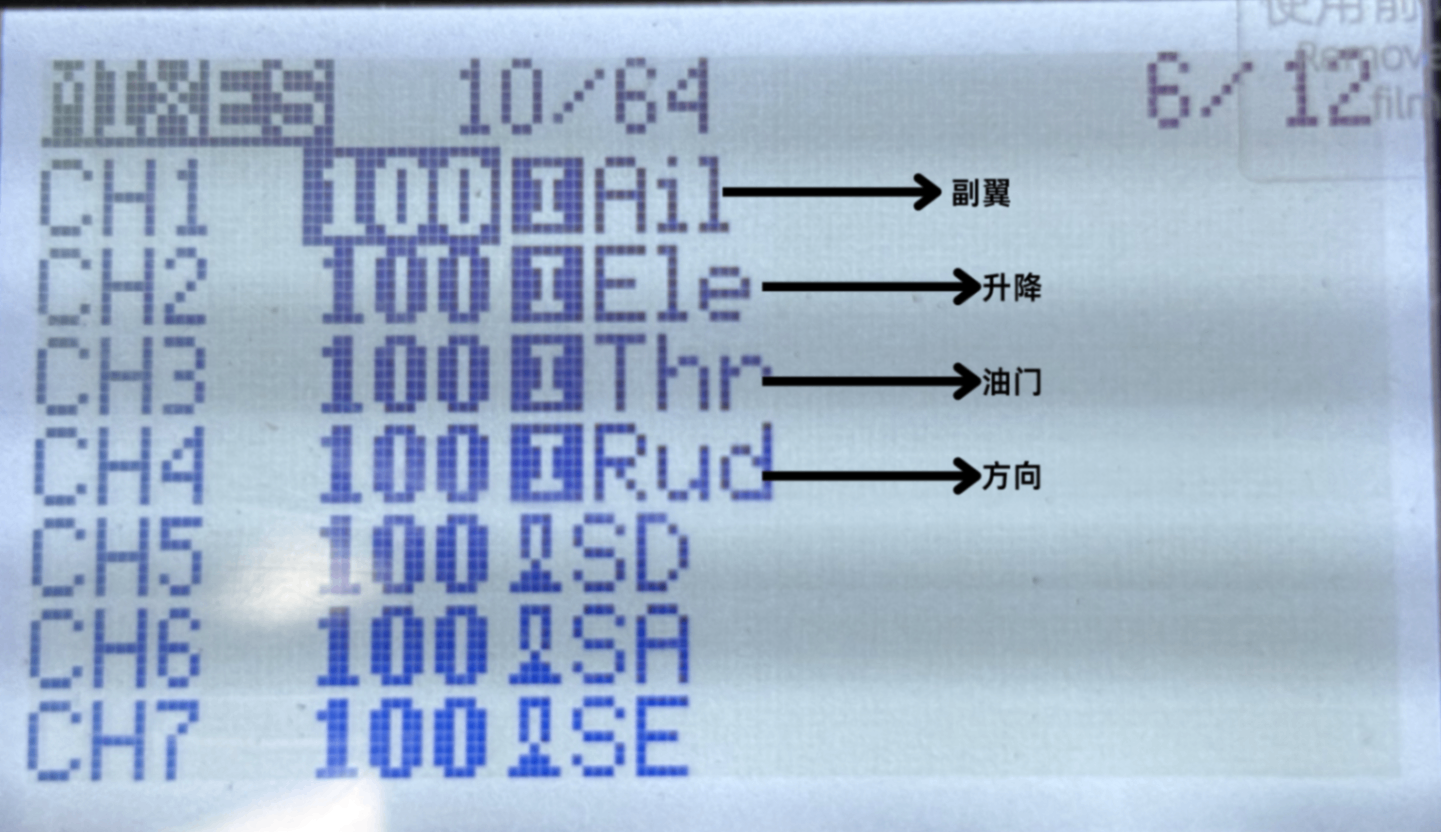
MDL->MIXS页面配置使用通道
开关功能分配:将特定的功能(如解锁(Arm)、飞行模式(Flight Mode)、BB响(Beeper)等)分配给不同的开关。
主要飞行模式
| 模式类别 | 模式名称(中文) | 常见英文名/缩写 | 核心特点与主要用途 | 依赖传感器 |
|---|---|---|---|---|
| 手动类 | 自稳模式 | Stabilize, ANGLE | 飞手通过操作摇杆来控制飞行器的倾斜角度,松开摇杆后飞机会自动回水平。适合新手练习起降和基础飞行。 | 陀螺仪,加速度计 |
| 特技模式/手动模式 | Acro, ACRO | 摇杆直接控制飞机的角速度,松开摇杆飞机会保持当前姿态。适合花飞、竞速,做出翻滚等动作,需要较高操控技巧。 | 陀螺仪 | |
| 半自动类 | 定高模式 | Altitude Hold, ALT_HOLD | 飞控自动控制油门以保持当前高度。摇杆控制前后左右和旋转。适合航线练习、航拍,减轻油门操控压力。 | 气压计,陀螺仪 |
| 定点模式/位置保持 | Position Hold, POS_HOLD , Loiter | 飞控尝试保持当前位置、指向和高度。适合精准悬停、稳定航拍。 | GPS,陀螺仪,加速度计 | |
| 自动类 | 返航模式 | Return to Launch (RTL) | 无人机自动返回起飞点("Home"点)并降落。是重要的安全保护功能,常在信号丢失或低电量时自动触发。 | GPS |
| 任务模式/自动模式 | Mission, Auto, AUTO | 无人机按照预先在地面站软件(如 Mission Planner)规划好的航点航线自动飞行。用于自动化巡检、测绘等。 | GPS | |
| 跟随模式 | Follow Me | 无人机通过跟踪手持的GPS设备或遥控器信号,跟随目标移动。适合运动跟拍。 | GPS | |
| 特殊类 | 运动模式 | Sport | 一种基于速率控制的自稳加定高的模式,可以将模型设定在特定的角度飞行。反应更敏捷,速度更快,但耗电也会增加。 | 陀螺仪,加速度计,气压计 |
| 无头模式/智能方向控制 | Headless Mode | 在此模式下,无人机会根据飞行方向来控制姿态,无论机头朝向何方,向前推杆无人机都会远离操作者,后拉则返回。对新手比较友好。 | 陀螺仪(通常不依赖GPS) | |
| 降落模式 | Land | 飞行器会在当前位置自动降落。 | 多种传感器 |
无人机用模式
| 模式名称 (中文) | 英文名与缩写 | 核心特点与依赖 | 主要适用场景与注意事项 |
|---|---|---|---|
| 自稳模式 | Stabilize | 基础稳定 。依赖陀螺仪 和加速度计。 | 新手练习 、手动飞行。飞控保持飞机水平,但不锁定高度和位置,需手动补偿风等因素带来的漂移。 |
| 定高模式 | Altitude Hold (AltHold) | 保持当前高度 。主要依赖气压计。 | 新手进阶 、航线飞行。飞控自动控制油门维持高度,操作者控制水平方向。注意:油门摇杆在中位(通常40%-60%)时保持高度,上下拨动可控制升降。 |
| 悬停模式 | Loiter | 保持当前三维位置和航向 。依赖GPS(需3D锁定)。 | 稳定悬停 、航拍、任务暂停。操作者仍可通过摇杆在限定速度内移动飞机。务必在GPS信号良好时使用(HDOP<2.0)。 |
| 引导模式 | Guided | 飞向指定点 。依赖GPS 和数传。 | 精准定位飞行。通过地面站软件(如Mission Planner)点击目标点,无人机自动飞往并悬停。 |
| 自动模式 | Auto | 执行预设任务 。依赖GPS 和预编程航点。 | 自动化任务(如航线测绘、巡检)。无人机按预设航点顺序自动飞行。 |
| 返航模式 | Return to Launch (RTL) | 自动返回起飞点 。依赖GPS。 | 安全保护(如低电量、信号丢失时自动触发)。先爬升到预设安全高度,再返回并降落。 |
| 降落模式 | Land | 自动降落。 | 一键降落。无人机将在当前位置自动降落。 |
| 特技模式 | Acro | 纯手动操控 。依赖陀螺仪。 | 花飞、竞速 。摇杆直接控制角速率,飞控不提供姿态稳定。需要高超技术。 |
| 无头模式 | Simple Mode / Super Simple | 简化方向控制 。Simple依赖罗盘 ;Super Simple额外依赖GPS。 | 新手方向感训练。飞机运动方向始终与摇杆输入方向一致,不受机头朝向影响。Super Simple模式下,拉杆飞机始终朝向Home点。 |