无人机的三轴增稳吊舱技术核心是通过一套精密的机电系统隔离无人机的姿态变化和振动,从而稳定光学载荷的视轴,实现清晰成像和目标稳定跟踪。其技术架构通常包含传感器、控制器和执行机构,三者协同工作构成核心回路。
为了清晰了解不同技术方案的要点,将它们整理成下表:
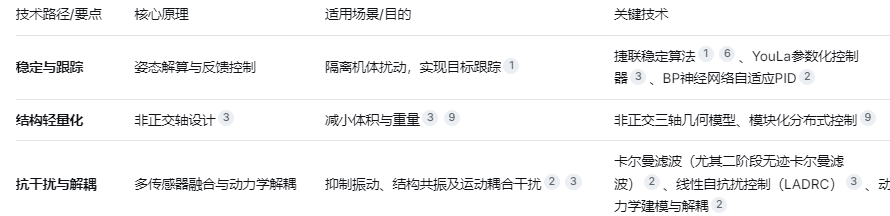
技术难点与解决方案
这项技术在实现过程中,面临着一些关键挑战:
1.多源扰动复杂:无人机飞行时,除了姿态变化,其旋翼等部件还会带来高频振动和不等幅低频扰动。加减速运动产生的线加速度也会严重干扰传感器的测量。这要求增稳系统必须具备宽频带、强鲁棒性的控制能力。
2.运动耦合干扰严重:平台各框架之间存在明显的惯量耦合(特别是俯仰与航向框之间)。同时,吊舱框架的运动与载体(无人机)的运动也存在耦合,使得精准控制单个轴变得困难。这需要通过精确的动力学建模和先进的控制算法进行动态解耦。
3.传感器噪声与非线性因素:作为反馈核心的MEMS陀螺仪等传感器存在测量噪声和漂移。此外,框架轴承的摩擦力矩具有不确定性,会严重影响低速平稳性。解决这些难题主要依靠高精度传感器校正、多源信息融合(如使用二阶段无迹卡尔曼滤波抑制外部加速度干扰),以及引入自适应摩擦补偿算法。
技术发展趋势
当前的技术发展主要围绕"更智能、更集成、更精确"展开。控制器的设计从经典的PID,向模糊自适应PID、神经网络自适应PID、滑模控制和线性自抗扰控制等方向发展,以提升系统的自适应和抗干扰能力。同时,传感器数据融合算法(如各种改进的卡尔曼滤波)也持续优化,以得到更纯净、准确的姿态信息。在结构上,非正交设计和模块化分布式控制正成为实现吊舱小型化、轻量化的重要思路。
简单来说,无人机三轴增稳技术是在体积和重量严格受限的条件下,通过机电结构设计、先进控制算法和信号处理技术的深度融合,来解决隔离复杂扰动这一核心问题。
