YOLOV5部署
训练
网上训练教程很多, 这里主要记录模型转换
使用python train.py --data=./data/my_dest.yaml进行训练
导出
导出的时候需要更改一下模型的样式
使用下面的函数代替原本的forward函数在yolov5/models/yolo.py文件里面(只有导出的时候使用, 记得改回去), 原本的函数会在这个函数里面处理模型输出到实际的图片坐标转换, 这里不使用
python
# RKNN 使用的forward
def forward(self, x):
z = []
for i in range(self.nl):
# 只使用一个激活函数 sigmoid, 对每一个输出通道使用相同的激活函数
# 直接获取预测结果
# 输出 (bs, na*ny*nx, no) 的"原始预测值"(还没乘 grid、没乘 anchor、没算 xywh 到像素坐标)
x[i] = torch.sigmoid(self.m[i](x[i]))
return x使用python export.py --opset=12, 如此即可获取到beat.onnx模型(需要根据你训练的模型位置设置权重文件)
可以使用工具再次简化模型
bash
python -m onnxsim weights/best.onnx weights/best-sim.onnx导出的模型记录在best-sim.onnx
模型转换
使用的工具是airockchip/rknn_model_zoo
手册在rknn_model_zoo/examples/yolov5 at main · airockchip/rknn_model_zoo
bash
cd model
./download_model.sh可以使用这个下载默认的模型, 使用的模型是yolov5s_relu.onnx
python
python convert.py ../model/yolov5s_relu.onnx rk3566使用自己模型的时候量化使用的图片文件要改一下
python
DATASET_PATH = '../../../datasets/mydataset/dataset.txt'
DEFAULT_RKNN_PATH = '../model/yolov5_my.rknn'
DEFAULT_QUANT = True在
examples/yolov5/python/convert.py文件里面, 这个txt文件里面记录的一系列的图片目录, 下面的参数是输出的模型名字
模型转换, 自己的模型使用的时候需要自己转换
使用的编译工具是aarch64-linux-gnu-gcc, 直接使用apt-get安装即可sudo apt install -y gcc-aarch64-linux-gnu g++-aarch64-linux-gnu
python
export GCC_COMPILER=/usr/bin/aarch64-linux-gnu
./build-linux.sh -t rk3566 -a aarch64 -d yolov5输出的文件在./install/rk356x_linux_aarch64/rknn_yolov5_demo/
板级文件
examples/yolov5/cpp/postprocess.cc这个文件里面有加载的label文件
cpp
#define LABEL_NALE_TXT_PATH "./model/coco_80_labels_list.txt"修改cpp代码examples/yolov5/cpp/postprocess.h里面的实际的分类的类型
cpp
#define OBJ_NAME_MAX_SIZE 64
#define OBJ_NUMB_MAX_SIZE 128
#define OBJ_CLASS_NUM 3 // 你实际使用的类型数量
#define NMS_THRESH 0.45 // 置信度
#define BOX_THRESH 0.25 // 非极大值抑制
#define PROP_BOX_SIZE (5 + OBJ_CLASS_NUM)默认的CMake复制的文件是coco的分类
cmake
install(FILES ${CMAKE_CURRENT_SOURCE_DIR}/../model/coco_80_labels_list.txt DESTINATION ./model)可以改成自己的分类文件
buildroot使用gcc11
需要更改buildroot系统
-> Toolchain
-> GCC compiler Version (<choice> [=y])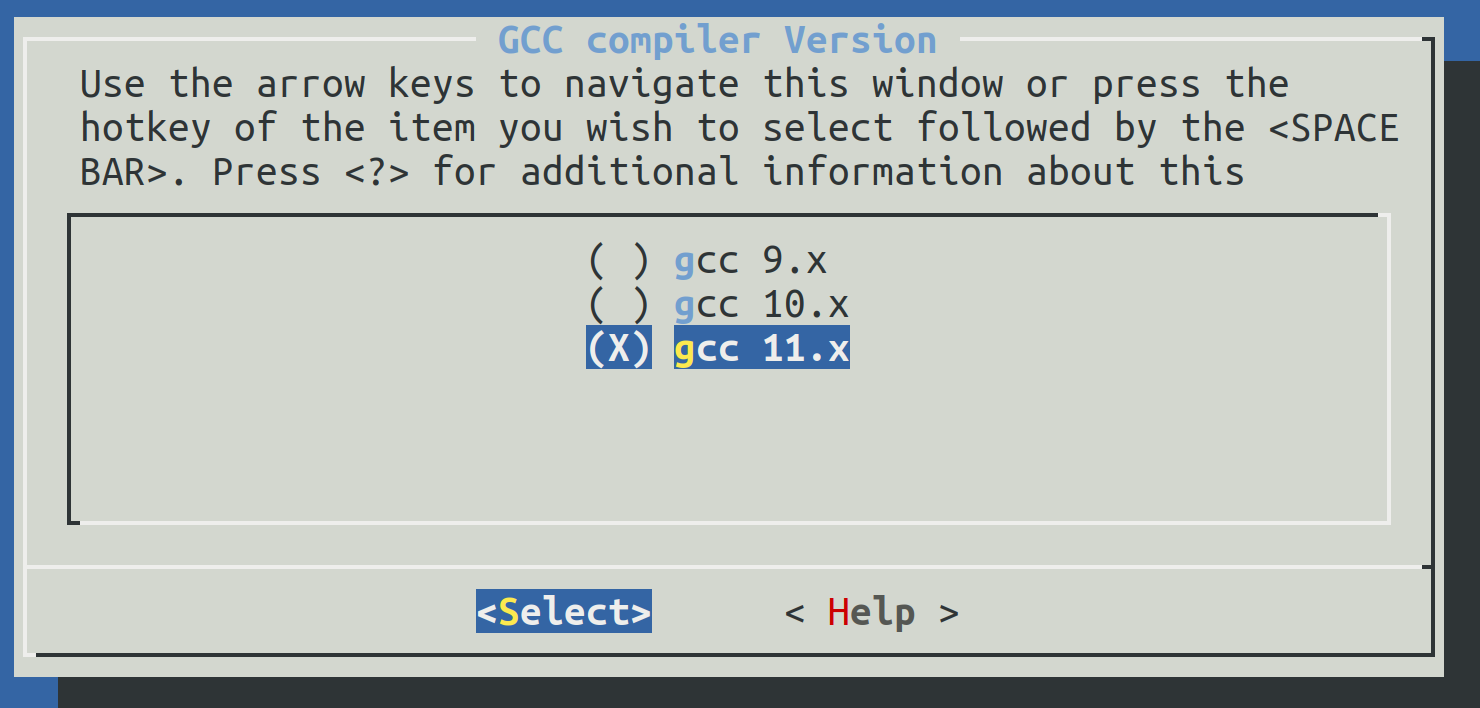
bash
# 在SDK/buildroot目录里面使用下面的命令进入配置界面
make savedefconfig
# 手动将生成在 buildroot/defconfig 文件内容复制到 ./configs/rockchip_rk3566_defconfig 文件里面
# 回到SDK根目录
./build.sh rootfs
./mkfirmware.sh
./build.sh updateimg测试
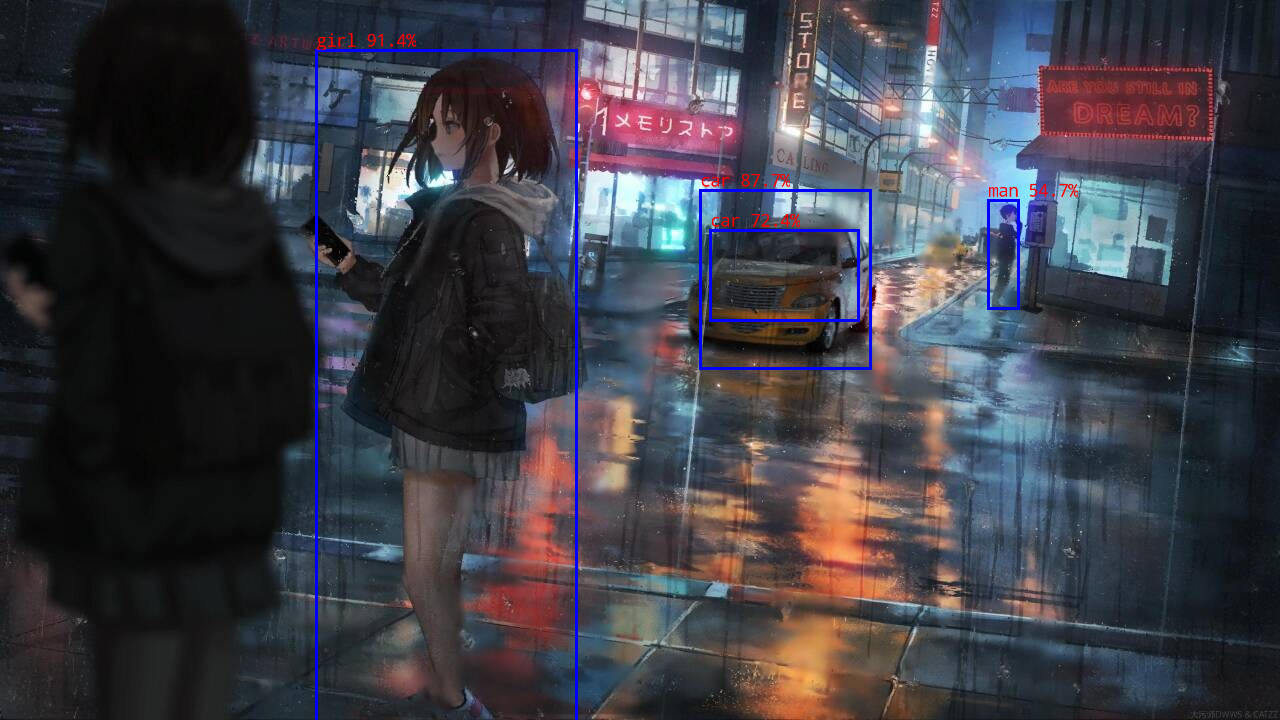
把./install/rk356x_linux_aarch64/rknn_yolov5_demo/放到板子上, 加载一个自己测试用的图片
bash
root@RK356X:/userdata/install/rk356x_linux_aarch64/rknn_yolov5_demo# ./rknn_yolov5_demo /userdata/yolov5_my.rknn /userdata/test.jepg使用自己的模型以及测试图片
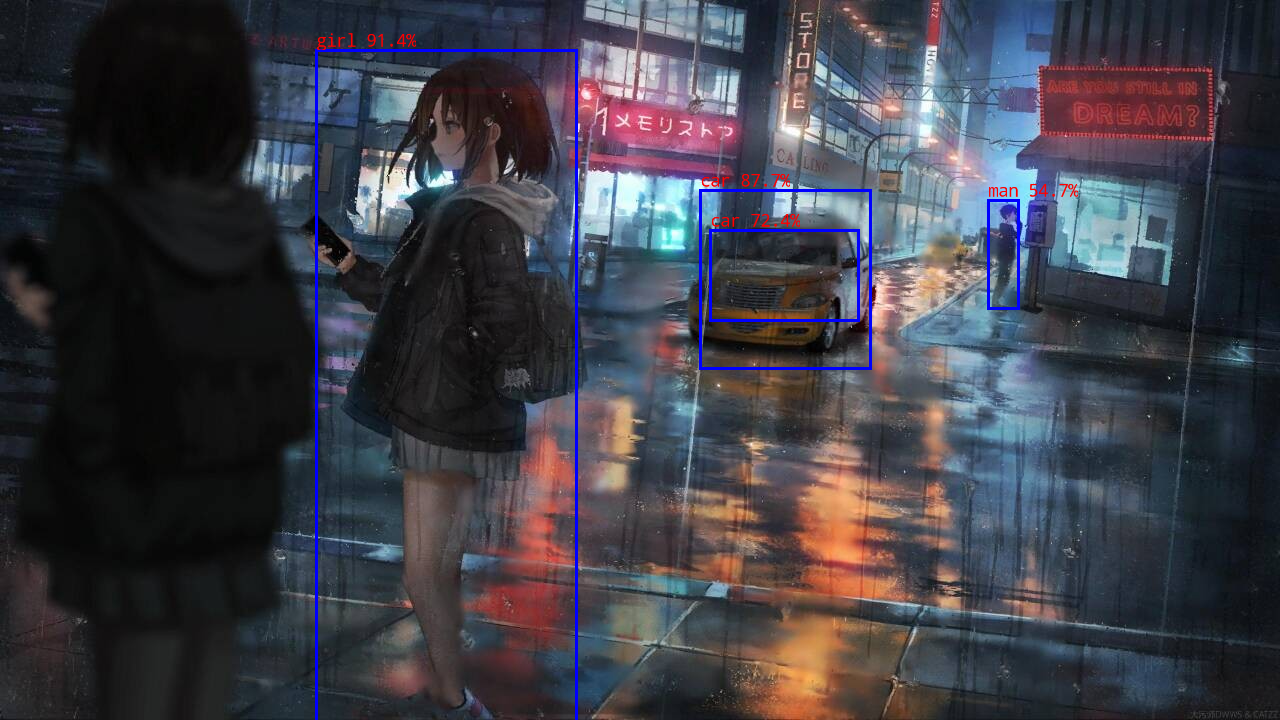
改一下BOX_THRESH 可以避免边框重叠