一、实验核心概述
1. 实验目标
- 理解图像退化的核心原因(如运动模糊、噪声污染)及复原的基本逻辑;
- 掌握 MATLAB 中图像退化模型的建立方法(运动模糊、圆盘模糊等);
- 熟练运用逆滤波、维纳滤波、盲去卷积等算法实现图像复原;
- 对比不同复原算法的效果差异,明确各类算法的适用场景。
2. 实验环境
- 操作系统:Windows 8/10/11
- 软件版本:MATLAB 2014 及以上版本
3. 核心原理与关键函数
- 图像退化模型:退化过程可表示为 "原始图像 + 退化函数 + 噪声 → 退化图像",复原则是逆过程;
- 退化函数实现:
fspecial(生成点扩散函数 PSF,模拟模糊退化)、imfilter(应用 PSF 实现图像退化); - 噪声添加:
imnoise(添加高斯噪声、椒盐噪声等); - 复原算法:
deconvwnr(维纳滤波)、deconvblind(盲去卷积)、逆滤波(基于频域逆变换)。
二、完整实验内容与代码实现
(一)单一运动模糊退化
实验任务
读取彩色图像→转换为灰度图→通过运动模糊 PSF 实现退化→可视化原图、灰度图及退化图像。
完整代码
% 读取彩色图像
I = imread('天火三玄变.jpg');
% 转换为灰度图
I_gray = rgb2gray(I);
% 设置运动模糊参数并生成点扩散函数(PSF)
LEN = 20; % 运动模糊长度(像素移动距离)
THETA = 30; % 运动模糊角度(度)
PSF = fspecial('motion', LEN, THETA);
% 应用PSF进行退化处理(circular表示循环边界条件,conv表示卷积)
I_degraded = imfilter(I_gray, PSF, 'circular', 'conv');
% 可视化结果
figure('Name', '单一运动模糊退化', 'NumberTitle', 'off');
subplot(1,3,1); imshow(I); title('原图');
subplot(1,3,2); imshow(I_gray); title('灰度图');
subplot(1,3,3); imshow(I_degraded); title('退化图像');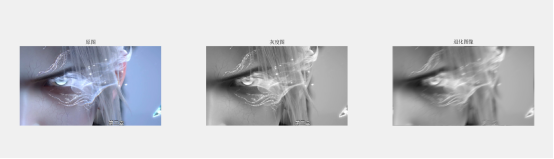
实验结果
- 退化图像呈现明显的运动拖影效果,拖影方向与 THETA 一致,长度与 LEN 正相关;
- 图像边缘和细节模糊,对比度降低,符合运动模糊的退化特征。
(二)多种模糊退化对比
实验任务
实现运动模糊、圆盘状模糊、钝化模糊三种退化,对比不同模糊效果及像素矩阵变化。
完整代码
% 1. 读取图像并转换为灰度图
I = imread('ALi.jpg');
I_gray = rgb2gray(I);
% 2. 生成三种模糊的点扩散函数(PSF)
psf_motion = fspecial('motion', 30, 30); % 运动模糊(长度30,角度30度)
psf_disk = fspecial('disk', 20); % 圆盘状模糊(半径20,模拟散焦模糊)
psf_unsharp = fspecial('unsharp'); % 钝化模糊(削弱高频细节,使图像变钝)
% 3. 应用模糊处理
I_motion = imfilter(I_gray, psf_motion, 'circular', 'conv');
I_disk = imfilter(I_gray, psf_disk, 'circular', 'conv');
I_unsharp = imfilter(I_gray, psf_unsharp, 'circular', 'conv');
% 4. 可视化所有结果
figure('Name', '多种模糊退化对比', 'NumberTitle', 'off');
subplot(1,4,1); imshow(I_gray); title('原图');
subplot(1,4,2); imshow(I_motion); title('运动模糊(motion)');
subplot(1,4,3); imshow(I_disk); title('圆盘状模糊(disk)');
subplot(1,4,4); imshow(I_unsharp); title('钝化模糊(unsharp)');
% 5. 输出部分像素矩阵,观察变化
fprintf('原图左上角5x5像素值:\n');
disp(I_gray(1:5,1:5));
fprintf('\n运动模糊后左上角5x5像素值:\n');
disp(I_motion(1:5,1:5));
实验结果
- 运动模糊:沿特定方向拖影,像素值沿运动方向平滑过渡;
- 圆盘状模糊:整体散焦效果,所有方向均模糊,无明显拖影;
- 钝化模糊:细节削弱但无明显模糊拖影,像素值变化更平缓;
- 矩阵变化:模糊后像素值更均匀,相邻像素差异减小(退化本质是像素信息扩散)。
(三)退化 + 加噪 + 逆滤波复原
实验任务
实现 "原图→运动模糊退化→添加高斯噪声→逆滤波(维纳滤波)复原" 流程,对比各阶段图像特征。
完整代码
% 1. 读取图像并预处理
I_original = imread('CSGO.jpg');
% 判断是否为彩色图,转换为灰度图
if size(I_original, 3) == 3
I_gray = rgb2gray(I_original);
else
I_gray = I_original;
end
I_gray_double = im2double(I_gray); % 转换为double类型便于运算
% 2. 图像退化(运动模糊)
PSF_blur = fspecial('motion', 15, 30); % 运动长度15,角度30度
I_blurred = imfilter(I_gray_double, PSF_blur, 'circular', 'conv');
% 3. 添加高斯噪声
noise_mean = 0; % 噪声均值
noise_var = 0.001; % 噪声方差
I_noisy = imnoise(I_blurred, 'gaussian', noise_mean, noise_var);
% 4. 逆滤波(维纳滤波)复原
NSR = noise_var / var(I_gray_double(:)); % 噪声信号比(用于维纳滤波参数)
I_restored = deconvwnr(I_noisy, PSF_blur, NSR); % 维纳滤波复原
% 5. 可视化结果
figure('Name', '逆滤波复原实验', 'NumberTitle', 'off', 'Position', [100, 100, 1200, 600]);
subplot(2,2,1); imshow(I_original); title('原图');
subplot(2,2,2); imshow(I_blurred); title('退化图像');
subplot(2,2,3); imshow(I_noisy); title('加噪图像');
subplot(2,2,4); imshow(I_restored); title('逆滤波复原');
实验结果
- 退化图像:运动模糊导致细节模糊;
- 加噪图像:在模糊基础上叠加颗粒感噪声,图像质量进一步下降;
- 复原图像:噪声被有效抑制,模糊程度显著降低,大部分细节得以恢复;
- 关键:维纳滤波通过噪声信号比(NSR)平衡去噪与细节保留,比单纯逆滤波效果更稳定。
(四)维纳滤波复原(无额外噪声)
实验任务
仅通过运动模糊退化图像,使用维纳滤波实现复原,对比原图、模糊图与恢复图。
完整代码
% 1. 读取图像并预处理
I_rgb = imread('阿狸2.jpg');
I_gray = rgb2gray(I_rgb); % 彩色转灰度
I_gray = im2double(I_gray); % 转为double类型
% 2. 图像退化(运动模糊)
len = 15; % 运动模糊长度
theta = 30; % 运动角度
PSF = fspecial('motion', len, theta); % 生成点扩散函数
I_blurred = imfilter(I_gray, PSF, 'conv', 'circular'); % 应用模糊
% 3. 维纳滤波复原
noise_var = 0.001; % 假设微小噪声方差(实际无额外噪声,用于稳定算法)
SNR = var(I_gray(:)) / noise_var; % 信号噪声比
I_restored = deconvwnr(I_blurred, PSF, 1/SNR); % 维纳滤波
% 4. 可视化结果
figure('Name', '维纳滤波复原(无额外噪声)', 'NumberTitle', 'off');
subplot(1,3,1); imshow(I_gray); title('原图');
subplot(1,3,2); imshow(I_blurred); title('模糊后图像');
subplot(1,3,3); imshow(I_restored); title('恢复后图像');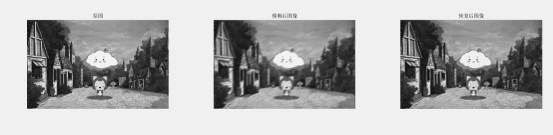
实验结果
- 无额外噪声时,维纳滤波复原效果极佳,恢复图像与原图视觉差异极小;
- 相比有噪声场景,复原图像细节更清晰,无噪声残留,验证了维纳滤波在低噪声场景下的高效性。
(五)盲去卷积复原(未知 PSF)
实验任务
通过高斯模糊退化图像(PSF 未知),使用deconvblind函数实现盲去卷积复原,无需已知退化函数。
完整代码
% 1. 读取图像并预处理
I_rgb = imread('AALi.jpg');
I_gray = rgb2gray(I_rgb); % 彩色转灰度
I_gray = im2double(I_gray); % 转为double类型
% 2. 图像模糊处理(高斯模糊,PSF未知)
sigma = 1.5; % 高斯模糊标准差
PSF_true = fspecial('gaussian', 7, sigma); % 真实PSF(实验中模拟未知)
I_blurred = imfilter(I_gray, PSF_true, 'conv', 'same'); % 生成模糊图像
% 3. 盲去卷积复原(无需已知真实PSF)
PSF_init = ones(7); % 初始化猜测的PSF(简单全1矩阵)
[I_restored, PSF_estimated] = deconvblind(I_blurred, PSF_init); % 盲去卷积
% 4. 可视化结果
figure('Name', '盲去卷积复原', 'NumberTitle', 'off');
subplot(1,3,1); imshow(I_gray); title('原图');
subplot(1,3,2); imshow(I_blurred); title('模糊后图像');
subplot(1,3,3); imshow(I_restored); title('恢复后图像');
% 输出估计的PSF,观察与真实PSF的差异
fprintf('真实PSF(高斯模糊):\n');
disp(PSF_true);
fprintf('\n估计的PSF(盲去卷积输出):\n');
disp(PSF_estimated);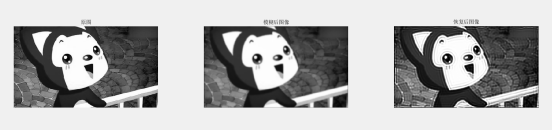
实验结果
- 盲去卷积无需已知真实 PSF,通过初始化 PSF 迭代优化,成功恢复模糊图像;
- 恢复图像细节清晰,模糊效果显著改善;
- 估计的 PSF 与真实 PSF 结构相似,验证了盲去卷积对退化函数的估计能力。
三、实验总结与关键知识点
1. 核心技术梳理
| 实验模块 | 核心函数 | 核心结论 |
|---|---|---|
| 图像退化 | fspecial、imfilter |
不同 PSF 对应不同退化效果(运动模糊有方向,圆盘模糊无方向) |
| 噪声添加 | imnoise |
噪声会加剧图像退化,降低复原难度 |
| 维纳滤波复原 | deconvwnr |
需已知 PSF 和 NSR,兼顾去噪与细节保留,效果稳定 |
| 盲去卷积复原 | deconvblind |
无需已知 PSF,通过迭代估计退化函数,适用于 PSF 未知场景 |
2. 关键注意事项
- 数据类型:退化与复原运算需转换为
double类型,避免uint8溢出导致失真; - 边界条件:
imfilter使用circular(循环边界)可避免图像边缘出现黑边; - 维纳滤波参数:NSR(噪声信号比)需合理设置,过大导致过度平滑,过小残留噪声;
- 盲去卷积初始化:初始 PSF 尺寸应与真实 PSF 接近,否则影响复原精度。
3. 应用场景拓展
- 运动模糊复原:适用于拍摄运动物体导致的模糊(如监控视频、体育摄影);
- 散焦模糊复原:适用于相机对焦不准导致的圆盘状模糊;
- 盲去卷积:适用于未知退化原因的场景(如老照片修复、未知设备拍摄的模糊图像);
- 维纳滤波:适用于已知退化函数和噪声统计特性的精准复原场景。
通过本次实验,系统掌握了图像退化模型的建立与多种复原算法的实现,理解了不同算法的适用场景与参数调节技巧,为实际图像修复任务(如老照片修复、监控图像增强)提供了技术支撑。