一、实验核心概述
1. 实验目标
- 理解图像频域处理的本质,掌握空间域与频域的转换逻辑;
- 熟练运用 MATLAB 实现二维傅里叶变换、逆变换及频谱可视化;
- 验证二维 DFT 的分解特性,理解不同图像的频谱分布差异;
- 掌握理想低通滤波器(ILPF)的设计与频域去噪应用。
2. 实验环境
- 操作系统:Windows 8/10/11
- 软件版本:MATLAB 2014 及以上版本
3. 核心原理与关键函数
- 频域基础:图像低频对应平缓区域(如背景),高频对应边缘、噪声等变化剧烈区域;
- 核心变换:
fft2(二维傅里叶变换)、ifft2(二维傅里叶逆变换); - 辅助操作:
fftshift(频谱中心化)、log(1+abs(F))(频谱可视化,压缩动态范围); - 滤波逻辑:频域滤波 = 傅里叶变换 → 滤波器与频域图像相乘 → 逆傅里叶变换。
二、完整实验内容与代码实现
(一)傅里叶变换与频谱可视化
实验任务
读取彩色图像→转换为灰度图→傅里叶变换→频谱中心化→可视化原图、灰度图及频谱图。
完整代码
% 读取彩色图像
img_rgb = imread('阿狸.jpg');
% 将彩色图像转换为灰度图
img_gray = rgb2gray(img_rgb);
% 对灰度图进行二维傅里叶变换(需转换为double类型)
F = fft2(double(img_gray));
% 频谱中心化(将低频成分移到图像中心)
F_shift = fftshift(F);
% 计算频谱的幅值,并取对数以便于显示(避免数值范围过大导致显示失真)
F_mag = log(1 + abs(F_shift));
% 创建figure窗口,展示结果
figure('Name','傅里叶变换实验','NumberTitle','off');
subplot(1,3,1); imshow(img_rgb); title('原图');
subplot(1,3,2); imshow(img_gray); title('灰度图');
subplot(1,3,3); imshow(F_mag, []); title('变换频谱'); % []自动映射灰度范围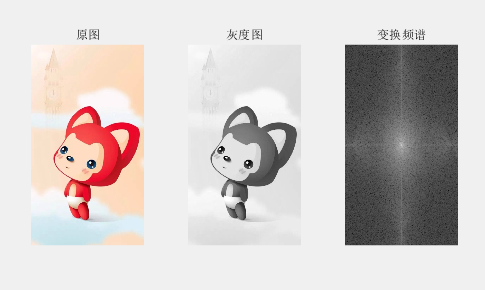
实验结果
- 频谱图中心为亮斑(低频成分集中),四周亮度逐渐降低(高频成分);
- 图像中边缘、细节越多,频谱四周的高频成分越明显。
(二)傅里叶变换与逆变换验证
实验任务
实现 "灰度图→傅里叶变换→逆变换" 流程,对比原图与逆变换结果的一致性。
完整代码
% 读取彩色图像
img_rgb = imread('天火三玄变.jpg');
% 转换为灰度图
img_gray = rgb2gray(img_rgb);
% 转为double类型以进行傅里叶变换
img_gray_double = double(img_gray);
% 二维傅里叶变换
F = fft2(img_gray_double);
% 频谱中心化(用于可视化)
F_shift = fftshift(F);
F_mag = log(1 + abs(F_shift));
% 傅里叶逆变换(还原回空间域)
img_recon = ifft2(F);
% 逆变换结果可能包含极小虚部,取实部并转换回uint8类型
img_recon = uint8(real(img_recon));
% 比较原图与逆变换图像矩阵是否相同
isSame = isequal(img_gray, img_recon);
if isSame
fprintf('原图与逆变换图像矩阵是否完全相同: 是\n');
else
fprintf('原图与逆变换图像矩阵是否完全相同: 否(微小差异由浮点运算精度导致)\n');
end
% 可视化结果
figure('Name', 'FFT 与逆变换实验', 'NumberTitle', 'off');
subplot(1,4,1); imshow(img_rgb); title('原图');
subplot(1,4,2); imshow(img_gray); title('灰度图');
subplot(1,4,3); imshow(F_mag, []); title('二维傅里叶变换');
subplot(1,4,4); imshow(img_recon); title('傅里叶逆变换');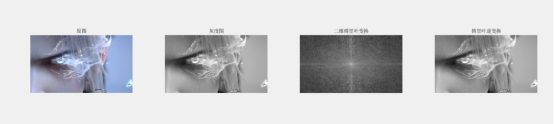
实验结果
- 逆变换图像与原图视觉完全一致,矩阵对比存在微小误差(浮点运算导致);
- 验证了傅里叶变换的可逆性,为 "频域处理→空间域还原" 提供技术支撑。
(三)不同图像的频谱对比
实验任务
读取两张不同图像,转换为灰度图后分别进行傅里叶变换,对比频谱分布差异。
完整代码
% 读取两张彩色图像
img1_rgb = imread('ALi.jpg');
img2_rgb = imread('天火三玄变.jpg');
% 转换为灰度图
img1_gray = rgb2gray(img1_rgb);
img2_gray = rgb2gray(img2_rgb);
% 转换为double类型以进行傅里叶变换
img1_double = double(img1_gray);
img2_double = double(img2_gray);
% 二维傅里叶变换
F1 = fft2(img1_double);
F2 = fft2(img2_double);
% 频谱中心化
F1_shift = fftshift(F1);
F2_shift = fftshift(F2);
% 计算幅值谱,并取对数以便显示
F1_mag = log(1 + abs(F1_shift));
F2_mag = log(1 + abs(F2_shift));
% 可视化对比结果
figure('Name', '傅里叶频谱对比', 'NumberTitle', 'off');
subplot(2,2,1); imshow(img1_gray); title('原图灰度图1');
subplot(2,2,2); imshow(img2_gray); title('原图灰度图2');
subplot(2,2,3); imshow(F1_mag, []); title('频谱图1');
subplot(2,2,4); imshow(F2_mag, []); title('频谱图2');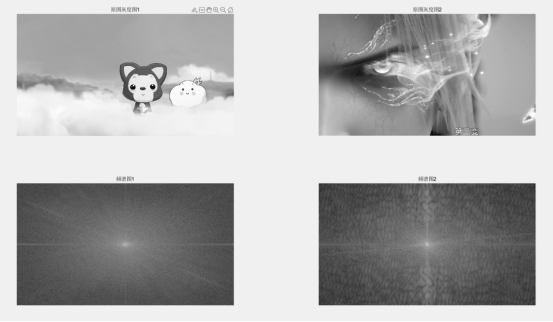
实验结果
- 频谱差异:平缓区域多的图像(如简单卡通图)频谱低频集中,高频微弱;细节丰富的图像(如复杂场景图)频谱高频成分更分散、亮度更高;
- 频谱对称性:傅里叶变换频谱满足共轭对称性,表现为以中心为原点的对称分布。
(四)二维 DFT 的分解验证
实验任务
验证 "二维 DFT = 行一维 DFT + 列一维 DFT",对比直接fft2与分步骤fft的结果。
完整代码
% 读取彩色图像并转换为灰度图
img_rgb = imread('阿狸2.jpg');
img_gray = rgb2gray(img_rgb);
img_double = double(img_gray);
%% 方法1:直接使用fft2进行二维傅里叶变换
F_fft2 = fft2(img_double);
F_fft2_shift = fftshift(F_fft2);
F_fft2_mag = log(1 + abs(F_fft2_shift));
%% 方法2:使用fft分两步实现(先对行,再对列)
F_row = fft(img_double, [], 2); % 对每一行做一维傅里叶变换
F_2step = fft(F_row, [], 1); % 对结果的每一列做一维傅里叶变换
F_2step_shift = fftshift(F_2step);
F_2step_mag = log(1 + abs(F_2step_shift));
%% 可视化两种方法的结果
figure('Name', '二维DFT分解验证', 'NumberTitle', 'off');
subplot(1,3,1); imshow(img_gray); title('原图');
subplot(1,3,2); imshow(F_fft2_mag, []); title('fft2实现变换');
subplot(1,3,3); imshow(F_2step_mag, []); title('fft实现变换');
%% 验证两种方法结果的一致性(允许微小浮点误差)
diff_matrix = abs(F_fft2 - F_2step);
max_error = max(diff_matrix(:));
fprintf('两种方法结果的最大误差: %.2e\n', max_error);
if max_error < 1e-8
fprintf('验证结论:两种方法在理论上一致,微小误差由浮点运算精度导致。\n');
else
fprintf('验证结论:结果差异超出预期,需检查代码。\n');
end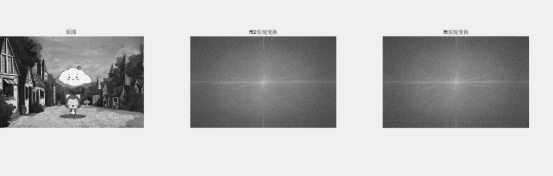
实验结果
- 两种方法的频谱图视觉完全一致,最大误差小于 1e-8;
- 验证了二维 DFT 的可分解性,为算法优化(如并行计算)提供理论依据。
(五)高斯噪声抑制:理想低通滤波
实验任务
为图像添加高斯噪声,设计理想低通滤波器,在频域实现去噪并可视化结果。
完整代码
% 配置参数:学号末位数M=7,截止频率D0=M*10=70
student_id_last_digit = 7;
D0 = student_id_last_digit * 10; % 理想低通滤波器截止频率
% 读取彩色图像并转换为灰度图
img_raw = imread('AALi.jpg');
img_gray = rgb2gray(img_raw);
% 为灰度图添加高斯白噪声
img_noise = imnoise(img_gray, 'gaussian');
% 对加噪图像做傅里叶变换并中心化(用于可视化和滤波)
fft_img_noise = fft2(double(img_noise));
fftshift_img_noise = fftshift(fft_img_noise);
% 获取图像尺寸,构造理想低通滤波器
[rows, cols] = size(img_noise);
H = zeros(rows, cols); % 初始化滤波器掩模
center_row = rows / 2; % 频域中心行坐标
center_col = cols / 2; % 频域中心列坐标
% 遍历每个频率点,计算到中心的距离并生成滤波器
for i = 1:rows
for j = 1:cols
% 计算频率点(i,j)到中心的欧氏距离
distance = sqrt((i - center_row)^2 + (j - center_col)^2);
% 理想低通滤波器:距离≤D0则保留(H=1),否则抑制(H=0)
if distance <= D0
H(i, j) = 1;
else
H(i, j) = 0;
end
end
end
% 频域滤波:滤波器掩模与频域图像逐元素相乘
filtered_fftshift = fftshift_img_noise .* H;
% 逆傅里叶变换,还原回空间域
filtered_img = ifft2(ifftshift(filtered_fftshift));
filtered_img = real(filtered_img); % 去除微小虚部
% 计算滤波后图像的频谱(用于可视化)
filtered_fft = fftshift(fft2(filtered_img));
% 可视化所有结果
figure('Name', '高斯加噪与理想低通滤波', 'NumberTitle', 'off');
subplot(2, 2, 1); imshow(img_noise); title('加噪后图像');
subplot(2, 2, 2); imshow(log(abs(fftshift_img_noise) + 1), []); title('噪声fft');
subplot(2, 2, 3); imshow(filtered_img, []); title('滤波后噪声图');
subplot(2, 2, 4); imshow(log(abs(filtered_fft) + 1), []); title('滤波后噪声图fft');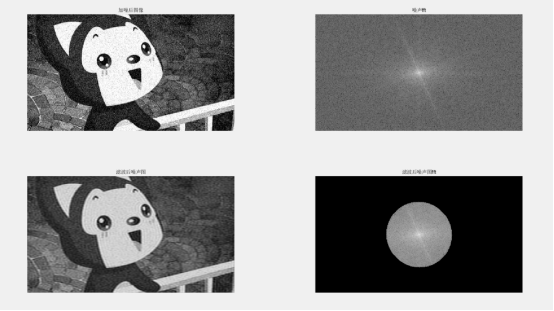
实验结果
- 加噪图像:因高斯噪声(高频成分)出现颗粒感;
- 滤波后图像:高频噪声被抑制,图像平滑,但边缘细节有轻微模糊(理想低通滤波器的振铃效应);
- 频谱变化:滤波后频谱高频区域亮度显著降低,仅保留中心低频成分。
三、实验总结与关键知识点
1. 核心技术梳理
| 实验模块 | 核心函数 | 核心结论 |
|---|---|---|
| 频谱可视化 | fft2、fftshift、log(1+abs(F)) |
低频对应平缓区域,高频对应边缘 / 噪声 |
| 变换可逆性 | ifft2 |
逆变换可还原原图,支持频域处理流程 |
| DFT 分解 | fft(分两步) |
二维 DFT 可通过两次一维 DFT 实现 |
| 低通滤波 | 自定义 ILPF 掩模 | 抑制高频噪声,代价是边缘模糊 |
2. 关键注意事项
- 数据类型:
fft2需输入double类型,避免uint8运算溢出; - 频谱显示:必须通过
log(1+abs(F))压缩动态范围,否则频谱过暗无法观察; - 逆变换处理:需用
real()去除虚部,再转换为uint8以正常显示; - 滤波器设计:滤波器尺寸需与频域图像一致,频率点距离计算基于频域中心。
3. 应用场景拓展
- 频域去噪:低通滤波器(理想、高斯、巴特沃斯)适用于抑制高频噪声;
- 图像增强:高通滤波器增强边缘细节,适用于模糊图像锐化;
- 图像压缩:利用频域能量集中在低频的特点,舍弃高频成分实现高效压缩(如 JPEG)。
通过本次实验,系统掌握了频率域图像处理的核心流程与关键技术,理解了傅里叶变换的本质与应用价值,为后续复杂频域滤波器设计与优化奠定了坚实基础。