代码地址:https://github.com/HKUDS/GraphST
摘要
时空图学习已成为建模结构化时空数据、并为城市感知任务(如犯罪预测与交通流量预测)学习区域表示的一种有前景的解决方案。然而,现有的大多数模型由于图结构信息聚合机制不够精确,往往对生成的区域图质量高度敏感,表现出较强的脆弱性。在真实场景中普遍存在的时空数据噪声与不完整性,使得高质量区域表示的生成面临诸多挑战。为应对这一问题,提出了一种新的时空图学习模型 GraphST,用以实现高效的自监督学习。
所提出的模型基于对抗式对比学习范式,能够自动蒸馏多视角自监督关键信息,从而实现鲁棒的时空图增强。GraphST 具备自适应识别困难样本的能力,以提升自监督学习效果,进一步增强表示的判别性与鲁棒性。此外,引入跨视角对比学习机制,用于建模不同视角下区域表示之间的相互依赖关系,并保持潜在关系的异质性。在多个真实数据集上的时空预测任务中,实验结果验证了 GraphST 方法的优越性。
引言
时空图表示学习旨在为城市中的每一个区域提供具有语义意义的潜在嵌入表示,从而支持多种时空预测任务,例如公共安全领域的犯罪预测(Li et al., 2022b)、智能交通系统中的交通流量预测(Pan et al., 2019;Zheng et al., 2020),以及基于位置服务中的兴趣点(POI)推荐(Zhou et al., 2019)。解决该问题的一种最具潜力的方法是采用图神经网络(Graph Neural Networks,GNNs)(Zhang et al., 2021a;Wu et al., 2022)。这类 GNN 方法通常基于采集到的时空数据(如人类出行轨迹、城市级交通流数据)构建区域图,并通过在区域图上的消息传递机制来建模区域之间的关联关系。
尽管时空图神经网络模型在实践中表现出较高的有效性,但其对构建区域图质量的高度依赖也带来了显著挑战。现有沿图结构连接进行嵌入传播与优化的范式(Zhang et al., 2020;Jin et al., 2020;Zhou et al., 2023)在表达能力上仍然受限,往往难以刻画真实城市环境中的复杂关系。此外,数据噪声与不完整性在时空数据分析中普遍存在,这进一步削弱了所构建区域图的质量。例如,传感器读数可能存在缺失或不准确的问题(Yi et al., 2016),而来自群体感知设备的人类出行数据往往伴随较强噪声(Feng et al., 2019)。同时,空间上相邻的区域由于城市功能差异,其关联性未必显著,而功能相似的区域在地理位置上却可能相距较远(Zhou et al., 2020)。上述因素共同导致区域级连接图的可靠性受到质疑,使得在噪声扰动条件下有效开展时空图表示学习变得尤为困难。
近年来,自监督学习在缓解数据稀缺与噪声问题方面取得了显著成功。受此启发,本文提出了一种具备有效数据增强机制的时空图预训练框架,并围绕以下关键问题展开模型设计:
-
Q1:如何构建时空图预训练任务以提供有效的自监督信号?
-
Q2:如何在对比学习过程中自动识别困难样本以增强模型鲁棒性?
-
Q3:如何建模不同区域关系视角之间的相互依赖性?
为解决上述问题,提出了一种新的模型------GraphST ,通过蒸馏自监督信息来推进时空图表示学习。具体而言,为在多视角区域图上自适应地生成自监督信号,设计了一种可学习函数,用以刻画城市中不同区域之间的全局城市语境信息。同时,提出了一种对抗式对比学习模型,在对比学习的极小极大优化框架下,使 GraphST 具备自动识别困难正样本与负样本的能力。最后,引入跨视角对比学习方法,以捕获不同关系视角之间的依赖关系,并通过自判别机制增强不同区域表示的一致性与均匀性。
本文的主要贡献总结如下:
-
系统分析了现有时空图学习方法在面对噪声与不完整城市数据扰动时所表现出的鲁棒性不足问题;
-
提出了一种时空图预训练模型 GraphST,通过引入对抗式对比学习范式,实现图结构自适应的自监督区域关系增强;
-
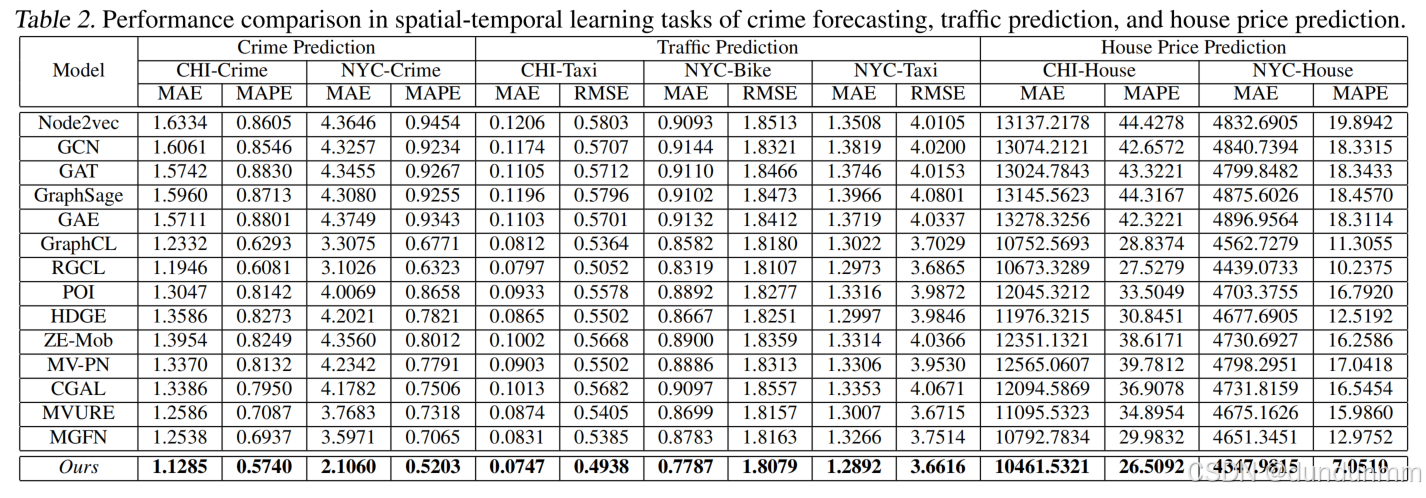
在多种实验设置与时空预测任务中,验证了 GraphST 相较于当前最先进方法所取得的显著性能提升。
方法
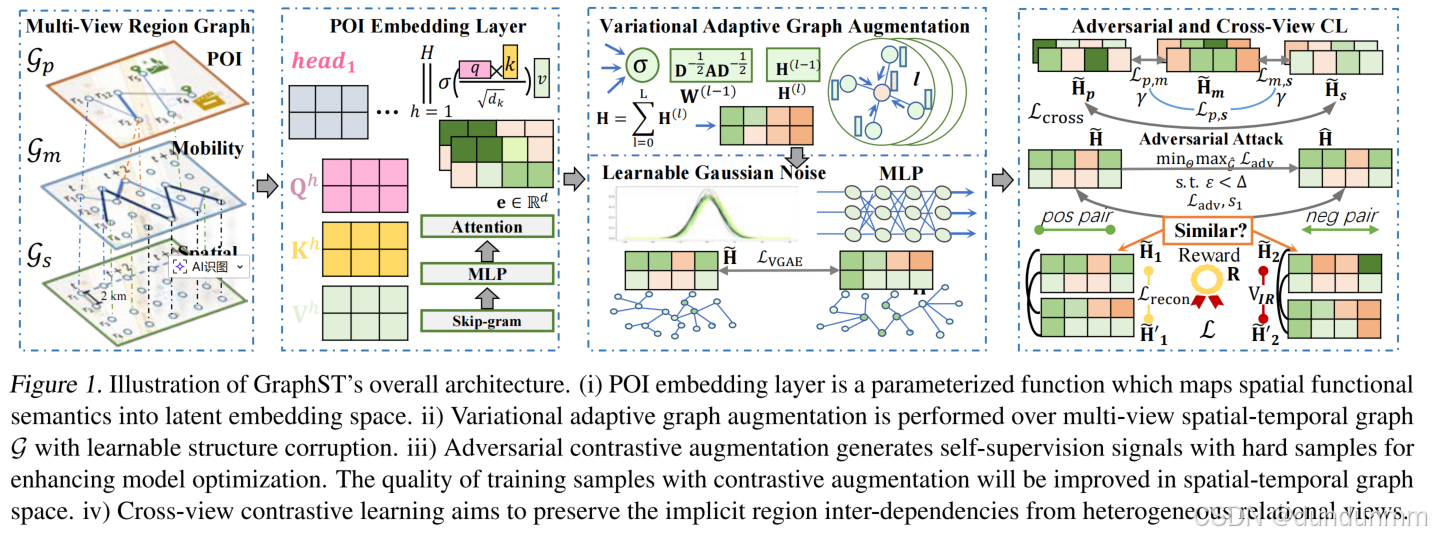
时空图学习方法 GraphST 的整体框架及关键组成部分如图 1 所示。
3.1 图增强的时空学习(Graph-enhanced Spatial-Temporal Learning)
构建了一种图增强的时空学习框架,旨在通过从多种视角(包括 POI 语义、城市出行流转以及地理位置信息)全面刻画空间与时间维度上的动态区域依赖关系,从而有效挖掘区域之间潜在的时空关联结构。
在嵌入空间中保持 POI 语义信息方面,采用 Skip-gram 与多层感知机(MLP)相结合的方法,对 POI 矩阵P 进行表示学习,并映射至潜在语义空间。具体而言,首先利用 Skip-gram 模型捕获每个 POI 的上下文语义信息,随后通过 MLP 对上下文嵌入进行非线性变换,得到最终的 POI 表示向量。该过程能够有效刻画 POI 之间的语义相关性,并在嵌入空间中予以保留。最终得到的表示矩阵 中,每一行对应一个区域 rj 的 d 维嵌入向量。
中,每一行对应一个区域 rj 的 d 维嵌入向量。
多视角区域图(Multi-View Region Graph)
在将多视角信息统一建模之前,首先对每一种视角进行独立建模,分别构建对应的视角特定区域图:
-
基于 POI 的区域图 Gp
通过计算区域 POI 语义嵌入 ej 与 ej′ 之间的相似度来构建。当两个区域的余弦相似度
cos(ej,ej′)(其中 ε 为预设阈值)时,在两者之间建立连接边。
-
时间感知的出行流图 Gm
该图在空间与时间两个维度上同时建模节点与边。对于每个区域 rj,根据不同时间片 t∈Tt 构建一系列时间感知区域节点。当存在轨迹
(rs,rd,ts,td)时,在时间片 ts的源区域节点r_s^{t_s} 与时间片 td的目标区域节点 r_d^{t_d} 之间建立有向连接。
-
基于地理位置的区域图 Gs
根据区域之间的空间距离,将地理位置相邻的区域进行连接。
在此基础上,通过堆叠上述视角特定区域图 Gp、Gm 和 Gs,构建统一的多视角区域图 G,以刻画区域关系的异质性。为实现多视角信息的有效融合,在不同视角图中属于同一区域的节点之间添加自连接边,从而实现跨视角的一致性建模。
信息传播机制(Information Propagation Paradigm)
为同时捕获多视角数据中的区域内部关系 与区域之间关系,GraphST 在统一的多视角区域图 G 上,沿空间与时间两个维度执行消息传递机制。第 (l−1) 层到第 l 层的嵌入传播过程定义如下:

其中,hj(l) 表示区域 rj在第 l层的嵌入表示;
Nj为区域 rj在图 G中的邻居节点集合;
系数 βj,j′定义为 ,用于归一化邻居影响;
,用于归一化邻居影响;
初始嵌入 hj(0) 来源于 POI 嵌入层;
σ(⋅)表示 ReLU 激活函数;
W(l−1)为第 (l−1)层的可学习变换矩阵。
进一步地,整体的信息聚合过程可表示为:
 其中,H 为图 G 中所有节点的嵌入矩阵,∣V∣ 表示节点数量,L 为图神经网络的层数;
其中,H 为图 G 中所有节点的嵌入矩阵,∣V∣ 表示节点数量,L 为图神经网络的层数;
A 为包含自连接的邻接矩阵,
D 为对应的度矩阵。
3.2 图增强(Graph Augmentation)
现有许多图对比学习方法通常采用人工设计的对比视角(如随机图结构扰动或节点掩码)以简化模型设计。然而,这类方式难以自适应地刻画全局时空关系的异质性。为此,针对多视角区域图 G 提出了一种自适应图增强机制,以提升图对比学习对复杂时空结构的建模能力。
该增强机制基于变分图自编码器(Variational Graph Auto-Encoder,VGAE)实现自监督学习,通过将对比式自监督学习与生成式自监督学习相统一,有效融合全局时空关系的异质性信息,从而提升时空表示学习性能。该方法能够在全局上下文感知的基础上,自动学习不同区域之间的依赖关系,并增强区域图结构对噪声扰动的鲁棒性,例如缓解空间相邻区域低相关性以及远距离区域强依赖关系带来的影响。
具体而言,基于嵌入映射函数
 (见公式 (2)),采用基于高斯噪声的数据增强策略(Rusak et al., 2020),其形式如下:
(见公式 (2)),采用基于高斯噪声的数据增强策略(Rusak et al., 2020),其形式如下:

其中,H~表示用于图结构学习的增强区域嵌入表示;
结构学习函数 η(⋅)用于估计区域之间的依赖关系;
噪声矩阵 Γ的元素 γ服从均值为 μ、标准差为 σ的高斯分布。
为实现可学习的对比视角生成,GraphST 使用两个带有可训练参数的两层 MLP(即 MLPmean(⋅)与 MLPstd(⋅),从原始嵌入矩阵 H中分别估计均值与标准差。随后,反复应用区域图结构学习函数 η(⋅),并通过对比损失函数执行自适应图增强,其损失形式为:

其中,τ为温度系数,用于调节梯度强度。
3.3 基于困难样本的对抗式对比学习(Adversarial Contrasting with Hard Samples)
为进一步增强图增强机制在扰动环境下的鲁棒性,引入对抗式自监督学习,以自动识别困难正样本与负样本节点。这一机制通过提供额外的自监督信号,有效辅助模型在训练过程中进行更具判别性的梯度更新。
具体而言,通过最大化生成式自编码器视角 G~与受约束对抗视角 G^之间的对比损失,来实现对抗式数据增强。该过程遵循极小极大的对抗优化范式:

其中,Ladv 为基于 InfoNCE 的对比损失;
Θ 表示变分图自编码器的可训练参数;
误差函数 ε(⋅) 定义为邻接矩阵与节点特征之间的绝对误差;
Δ 为误差约束超参数,用于限制邻接矩阵 A^,A~与节点嵌入 H^,H~之间的扰动幅度。
为实现对编码后节点嵌入与图结构的对抗式增强,采用投影梯度下降(Projected Gradient Descent,PGD)攻击方法(Feng et al., 2022)进行数据扰动建模。
3.4 跨视角图对比学习(Cross-View Graph Contrastive Learning)
为进一步增强 GraphST 对不同数据视角之间依赖关系的建模能力,并保持区域关系的异质性特征,在结构级图增强之外,引入跨视角图对比学习机制。
具体而言,将增强后的嵌入矩阵 H~ 划分为三个视角特定子矩阵:
H~p、H~m 和 H~s,分别对应 POI 语义关联视角、城市出行流转视角和地理空间视角。
以 POI 图视角 (Gp,H~p) 与出行图视角 (Gm,H~m) 之间的对比为例,其对比损失定义为:

其余两项对比损失 Lm,s(Gm-Gs)和
Lp,s(Gp-Gs)可采用相同方式构建。
为对不同视角间的对比项进行加权,引入权重系数:

其中,⊙ 表示逐元素乘积,σ(⋅)为 ReLU 激活函数。
最终,跨视角图对比学习的联合损失函数定义为:

3.5 基于 InfoMin 的对比模型优化(Contrastive Model Optimization with InfoMin)
为使数据增强过程能够自适应对比学习任务需求,引入基于互信息最小化(Information Minimization, InfoMin)思想的对比感知奖励函数,对生成式变分自编码器的重构损失进行增强(Tian et al., 2020;Wang et al., 2019)。该奖励函数形式化定义如下:

其中,ϵ为阈值参数,用于区分增强视角是否对对比学习任务具有足够挑战性;ξ为常数缩放因子。
为进一步提升模型训练过程的稳定性与鲁棒性,在整体优化目标中引入信息正则化(Information Regularization, IR)项,其定义为:
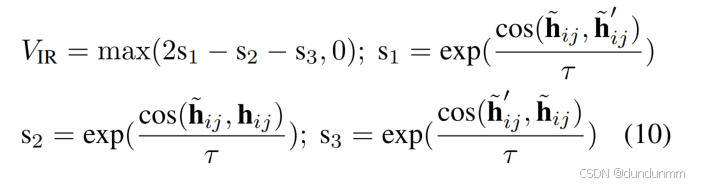
其中,H~′表示增强图 G~′ 对应的节点嵌入矩阵,该矩阵由公式 (3) 生成;
τ 为温度参数;
s1强化正样本对之间的一致性,
s2 与 s3则用于抑制增强视角与原始表示之间的冗余信息,从而实现互信息最小化约束。
在引入奖励函数与信息正则项后,模型的整体优化目标定义为最小化如下联合损失函数:

其中,
Lrecon表示基于 VGAE 所生成图结构 G~与原始区域图 G之间的重构损失;
λ为信息正则化项的权重系数,用于平衡各损失项在训练过程中的贡献。
实验
后续会着重看一下对抗式对比学习那一部分的内容。。。