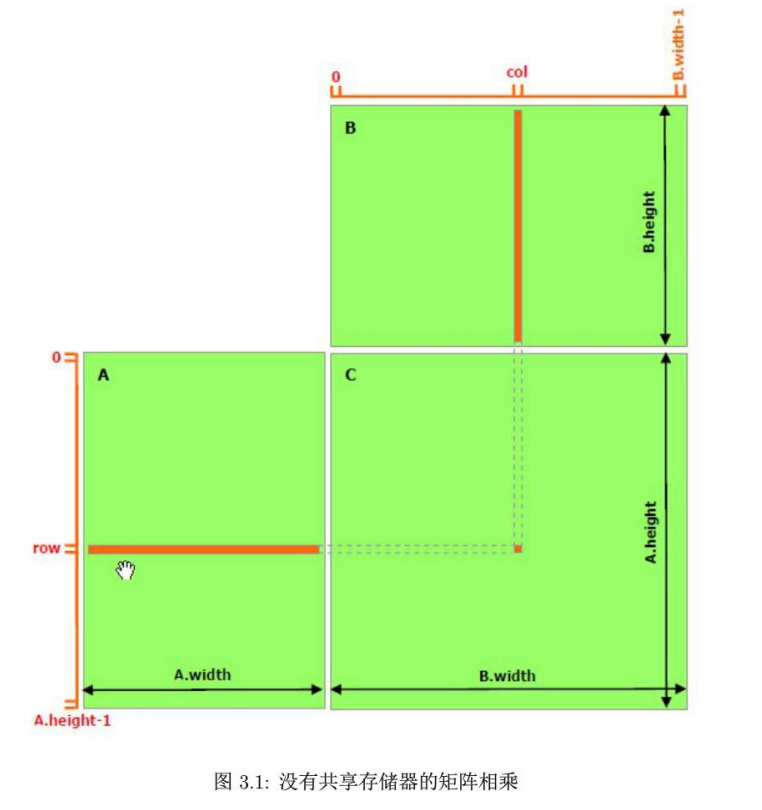
普通矩阵乘法
在未使用共享存储器(Shared Memory)时,CUDA 矩阵乘法的计算逻辑 是在 SM(流多处理器)的 CUDA Core 中执行的,临时数据会优先存在寄存器(Register) 中;但 A、B 矩阵的读取、C 矩阵的写入 完全依赖全局存储器(Global Memory)
共享存储的矩阵乘法
使用共享存储器的时候
完整代码
vscode配置好环境之后(不会的看我往期博文),可以直接将代码粘贴到.cu文件中编译运行。代码的细节以及相关内容讲解放在完整代码的后面,诸君稍安勿躁。
cpp
nvcc mul_share.cu -o mul_share
cpp
// mul_share.cu
#include <iostream>
#include <cuda_runtime.h>
#include <cmath>
#include <chrono>
#include <iomanip>
#include <vector>
#include <tuple>
#include <cstdlib>
#define BLOCK_SIZE 16
#define CHECK(call) \
do { \
cudaError_t err = call; \
if (err != cudaSuccess) { \
std::cerr << "CUDA Error: " << cudaGetErrorString(err) \
<< " at line " << __LINE__ << std::endl; \
exit(EXIT_FAILURE); \
} \
} while (0)
typedef struct {
int width;
int height;
int stride;
float *elements;
} Matrix;
__device__ float getElement(const Matrix &mat, int row, int col) {
return mat.elements[row * mat.stride + col];
}
__device__ void setElement(Matrix &mat, int row, int col, float value) {
mat.elements[row * mat.stride + col] = value;
}
__global__ void matrixMulSharedKernel(const Matrix A, const Matrix B, Matrix C) {
// Shared memory declaration
__shared__ float As[BLOCK_SIZE][BLOCK_SIZE];
__shared__ float Bs[BLOCK_SIZE][BLOCK_SIZE];
// Thread indices
int bx = blockIdx.x;
int by = blockIdx.y;
int tx = threadIdx.x;
int ty = threadIdx.y;
int row = by * BLOCK_SIZE + ty;
int col = bx * BLOCK_SIZE + tx;
float Cvalue = 0.0f;
for (int m = 0; m < (A.width + BLOCK_SIZE - 1) / BLOCK_SIZE; ++m) { // (A.width + BLOCK_SIZE - 1) / BLOCK_SIZE是A.width/BLOCK_SIZE向上取整的标准写法,适用所有未知情况。
// Load A tile into shared memory
if (row < A.height && (m * BLOCK_SIZE + tx) < A.width) {
As[ty][tx] = getElement(A, row, m * BLOCK_SIZE + tx);
} else {
As[ty][tx] = 0.0f;
}
if ((m * BLOCK_SIZE + ty) < B.height && col < B.width) {
Bs[ty][tx] = getElement(B, m * BLOCK_SIZE + ty, col);
} else {
Bs[ty][tx] = 0.0f;
}
__syncthreads();
for (int k = 0; k < BLOCK_SIZE; ++k) {
Cvalue += As[ty][k] * Bs[k][tx];
}
__syncthreads();
}
if (row < C.height && col < C.width) {
setElement(C, row, col, Cvalue);
}
}
void matrixMulCPU(const Matrix &A, const Matrix &B, Matrix &C) {
for (int i = 0; i < C.height; ++i) {
for (int j = 0; j < C.width; ++j) {
float sum = 0.0f;
for (int k = 0; k < A.width; ++k) {
sum += A.elements[i * A.stride + k] * B.elements[k * B.stride + j];
}
C.elements[i * C.stride + j] = sum;
}
}
}
void initMatrix(Matrix &mat, bool random = true) {
// Use fixed seed for reproducibility
if (random) {
srand(42); // Fixed seed
}
for (int i = 0; i < mat.height; ++i) {
for (int j = 0; j < mat.width; ++j) {
if (random) {
// Generate values in smaller range to reduce accumulation error
mat.elements[i * mat.stride + j] = static_cast<float>(rand() % 10) / 10.0f;
} else {
mat.elements[i * mat.stride + j] = 0.0f;
}
}
}
}
// Compare two matrices (using relative error)
bool compareMatrices(const Matrix &A, const Matrix &B, float relativeEpsilon = 1e-5, float absoluteEpsilon = 1e-5) {
if (A.height != B.height || A.width != B.width) {
std::cout << "Matrix dimensions mismatch!" << std::endl;
return false;
}
int totalElements = A.height * A.width;
int mismatches = 0;
float maxRelativeError = 0.0f;
for (int i = 0; i < A.height; ++i) {
for (int j = 0; j < A.width; ++j) {
float a = A.elements[i * A.stride + j];
float b = B.elements[i * B.stride + j];
float diff = fabs(a - b);
// Calculate relative error
float relativeError = 0.0f;
if (fabs(a) > absoluteEpsilon || fabs(b) > absoluteEpsilon) {
relativeError = diff / std::max(fabs(a), fabs(b));
}
if (relativeError > maxRelativeError) {
maxRelativeError = relativeError;
}
// If both absolute and relative errors exceed thresholds, consider it an error
if (diff > absoluteEpsilon && relativeError > relativeEpsilon) {
if (mismatches < 5) { // Print only first few errors
std::cout << std::fixed << std::setprecision(15);
std::cout << "Mismatch at (" << i << ", " << j << "): "
<< a << " vs " << b
<< ", diff=" << diff
<< ", rel_err=" << relativeError << std::endl;
}
mismatches++;
if (mismatches > 100) { // Stop if too many errors
std::cout << "Too many mismatches, stopping comparison..." << std::endl;
return false;
}
}
}
}
if (mismatches > 0) {
std::cout << "Total mismatches: " << mismatches << "/" << totalElements
<< ", Max relative error: " << maxRelativeError << std::endl;
return false;
}
std::cout << "Matrices match with max relative error: " << maxRelativeError << std::endl;
return true;
}
// Validate matrix multiplication for a given size
void validateMatrixMul(int M, int N, int K) {
std::cout << "\n=== Matrix Multiplication Validation ===" << std::endl;
std::cout << "Matrix dimensions: A(" << M << "x" << N << ") * B("
<< N << "x" << K << ") = C(" << M << "x" << K << ")" << std::endl;
// Allocate memory on host
Matrix h_A, h_B, h_C_cpu, h_C_gpu;
h_A.height = M;
h_A.width = N;
h_A.stride = N;
h_A.elements = new float[M * N];
h_B.height = N;
h_B.width = K;
h_B.stride = K;
h_B.elements = new float[N * K];
h_C_cpu.height = M;
h_C_cpu.width = K;
h_C_cpu.stride = K;
h_C_cpu.elements = new float[M * K];
h_C_gpu.height = M;
h_C_gpu.width = K;
h_C_gpu.stride = K;
h_C_gpu.elements = new float[M * K];
// Initialize matrices
std::cout << "Initializing matrices..." << std::endl;
initMatrix(h_A, true);
initMatrix(h_B, true);
// Initialize C matrices to 0
for (int i = 0; i < M * K; i++) {
h_C_cpu.elements[i] = 0.0f;
h_C_gpu.elements[i] = 0.0f;
}
// Allocate memory on device
Matrix d_A, d_B, d_C;
d_A.height = M;
d_A.width = N;
d_A.stride = N;
CHECK(cudaMalloc(&d_A.elements, M * N * sizeof(float)));
d_B.height = N;
d_B.width = K;
d_B.stride = K;
CHECK(cudaMalloc(&d_B.elements, N * K * sizeof(float)));
d_C.height = M;
d_C.width = K;
d_C.stride = K;
CHECK(cudaMalloc(&d_C.elements, M * K * sizeof(float)));
// Copy data from host to device
std::cout << "Copying data to GPU..." << std::endl;
CHECK(cudaMemcpy(d_A.elements, h_A.elements, M * N * sizeof(float),
cudaMemcpyHostToDevice));
CHECK(cudaMemcpy(d_B.elements, h_B.elements, N * K * sizeof(float),
cudaMemcpyHostToDevice));
CHECK(cudaMemset(d_C.elements, 0, M * K * sizeof(float)));
// Set CUDA kernel parameters
dim3 blockSize(BLOCK_SIZE, BLOCK_SIZE);
dim3 gridSize((K + BLOCK_SIZE - 1) / BLOCK_SIZE,
(M + BLOCK_SIZE - 1) / BLOCK_SIZE);
std::cout << "Launching CUDA kernel..." << std::endl;
std::cout << "Grid size: (" << gridSize.x << ", " << gridSize.y << ")" << std::endl;
std::cout << "Block size: (" << blockSize.x << ", " << blockSize.y << ")" << std::endl;
// Run GPU version and time it
auto start_gpu = std::chrono::high_resolution_clock::now();
matrixMulSharedKernel<<<gridSize, blockSize>>>(d_A, d_B, d_C);
CHECK(cudaDeviceSynchronize());
auto end_gpu = std::chrono::high_resolution_clock::now();
// Check for kernel execution errors
cudaError_t kernelError = cudaGetLastError();
if (kernelError != cudaSuccess) {
std::cerr << "Kernel launch failed: " << cudaGetErrorString(kernelError) << std::endl;
exit(EXIT_FAILURE);
}
// Copy results back from device to host
std::cout << "Copying results back to CPU..." << std::endl;
CHECK(cudaMemcpy(h_C_gpu.elements, d_C.elements, M * K * sizeof(float),
cudaMemcpyDeviceToHost));
// Run CPU version and time it
std::cout << "Running CPU version..." << std::endl;
auto start_cpu = std::chrono::high_resolution_clock::now();
matrixMulCPU(h_A, h_B, h_C_cpu);
auto end_cpu = std::chrono::high_resolution_clock::now();
// Compare results
std::cout << "Comparing results..." << std::endl;
bool resultsMatch = compareMatrices(h_C_cpu, h_C_gpu, 1e-4f, 1e-4f);
// Output performance information
auto gpu_duration = std::chrono::duration_cast<std::chrono::microseconds>
(end_gpu - start_gpu).count();
auto cpu_duration = std::chrono::duration_cast<std::chrono::microseconds>
(end_cpu - start_cpu).count();
std::cout << "\n=== Performance Results ===" << std::endl;
std::cout << "GPU execution time: " << gpu_duration << " microseconds ("
<< gpu_duration / 1000.0 << " ms)" << std::endl;
std::cout << "CPU execution time: " << cpu_duration << " microseconds ("
<< cpu_duration / 1000.0 << " ms)" << std::endl;
if (gpu_duration > 0) {
std::cout << "Speedup: " << (float)cpu_duration / gpu_duration << "x" << std::endl;
}
// Print partial results for verification (only for small matrices)
if (M <= 8 && K <= 8) {
std::cout << "\n=== First 4x4 elements of matrix C ===" << std::endl;
std::cout << "CPU results:" << std::endl;
for (int i = 0; i < std::min(4, M); ++i) {
for (int j = 0; j < std::min(4, K); ++j) {
std::cout << std::setw(10) << h_C_cpu.elements[i * K + j] << " ";
}
std::cout << std::endl;
}
std::cout << "\nGPU results:" << std::endl;
for (int i = 0; i < std::min(4, M); ++i) {
for (int j = 0; j < std::min(4, K); ++j) {
std::cout << std::setw(10) << h_C_gpu.elements[i * K + j] << " ";
}
std::cout << std::endl;
}
}
// Free memory
delete[] h_A.elements;
delete[] h_B.elements;
delete[] h_C_cpu.elements;
delete[] h_C_gpu.elements;
CHECK(cudaFree(d_A.elements));
CHECK(cudaFree(d_B.elements));
CHECK(cudaFree(d_C.elements));
if (resultsMatch) {
std::cout << "\nValidation passed! GPU and CPU results match." << std::endl;
} else {
std::cout << "\nValidation failed! GPU and CPU results do not match." << std::endl;
}
}
int main() {
std::cout << "CUDA Matrix Multiplication (Shared Memory Optimization) Validation" << std::endl;
std::cout << "==================================================================" << std::endl;
// Test cases with different matrix sizes
// For simplicity, we'll use a simpler approach without tuples
int testCases[][3] = {
{16, 17, 20}, // Small size, exactly tile size
{32, 32, 32}, // Small size, 2x tile size
{64, 64, 64}, // Medium size
{128, 128, 128}, // Medium-large
{256, 256, 256}, // Large size
{522, 768, 1024} // Very large size
};
int numTestCases = sizeof(testCases) / sizeof(testCases[0]);
for (int i = 0; i < numTestCases; i++) {
int M = testCases[i][0];
int N = testCases[i][1];
int K = testCases[i][2];
validateMatrixMul(M, N, K);
std::cout << "\n" << std::string(50, '=') << "\n" << std::endl;
}
return 0;
}算法细节讲解
1、结果矩阵划分
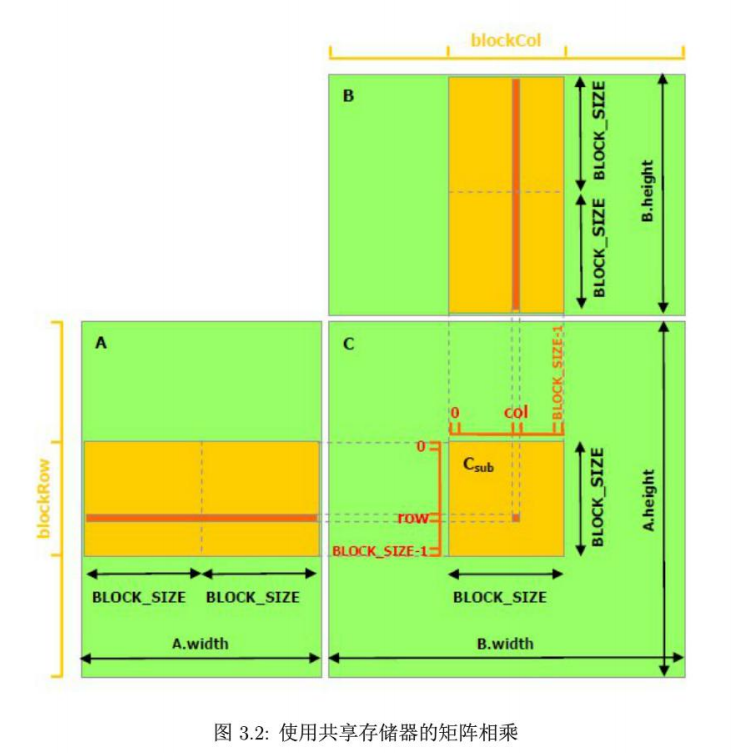
首先我们按照BLOCK_SIZE * BLOCK_SIZE 的大小为一组子矩阵,将C矩阵 划成多个子矩阵C_sub,然后我们在计算C_sub内的一个元素时,使用一个单独的线程thread 。一个C_sub有BLOCK_SIZE * BLOCK_SIZE个待求解的元素,所以在计算一个C_sub时,会有BLOCK_SIZE * BLOCK_SIZE个thread同时工作。
故在代码中,可以看到一个内核函数,一开始就使用bx、by、tx、ty确定了这个内核函数是在哪个block的哪个thread上面运行的。
cpp
__global__ void matrixMulSharedKernel(const Matrix A, const Matrix B, Matrix C) {
// Shared memory declaration
__shared__ float As[BLOCK_SIZE][BLOCK_SIZE];
__shared__ float Bs[BLOCK_SIZE][BLOCK_SIZE];
// Thread indices
int bx = blockIdx.x;
int by = blockIdx.y;
int tx = threadIdx.x;
int ty = threadIdx.y;2、share
我们声明了两块共享内存,但是你需要知道之所以称之为共享,是因为这一个内核函数在执行时,并不会把这两块内存都写满,而是只写其中一部分。另外,如果以上图为例的话,我们会分为2轮来计算C_sub中的一个元素,因为矩阵A的宽度刚好够塞两个BLOCK。所以在代码中我们会看到一个for循环来控制轮数。

每个线程在每一轮都会将两个元素(一个来自A,一个来自B)放到共享内存中去,还记得之前我有说BLOCK_SIZE * BLOCK_SIZE个thread同时工作吗?所以在很短的时间内,大家一齐将A的左边的block 和B的上面的block都加载进了共享内存As和Bs,由于共享内存是一块很小但是性能异常卓越的处理单元,所以在这上面,计算速度要快于普通的全局内存。
对应的代码如下,这里的if-else对于边界进行了控制;在for循环的每一轮内,只存取两个元素。注意到tytx,很明显的说明了,一个线程对应的内核函数只会掌管其在As、Bs上对应的一块区域。
cpp
// (A.width + BLOCK_SIZE - 1) / BLOCK_SIZE是A.width/BLOCK_SIZE向上取整的标准写法,具有普适性
for (int m = 0; m < (A.width + BLOCK_SIZE - 1) / BLOCK_SIZE; ++m) {
if (row < A.height && (m * BLOCK_SIZE + tx) < A.width) {
As[ty][tx] = getElement(A, row, m * BLOCK_SIZE + tx);
} else {
As[ty][tx] = 0.0f;
}
if ((m * BLOCK_SIZE + ty) < B.height && col < B.width) {
Bs[ty][tx] = getElement(B, m * BLOCK_SIZE + ty, col);
} else {
Bs[ty][tx] = 0.0f;
}如果超出边界,则赋值为0,不会影响计算。这对于A B矩阵含有padding的情况是有用的。
3、__syncthreads()
它保证了在所有线程都加载完毕之后,代码才进行到下面的计算流程。就像小学放学时间,班主任需要等一个班的孩子们都到齐、全站好队了,才带队出校门把孩子送到家长手里。
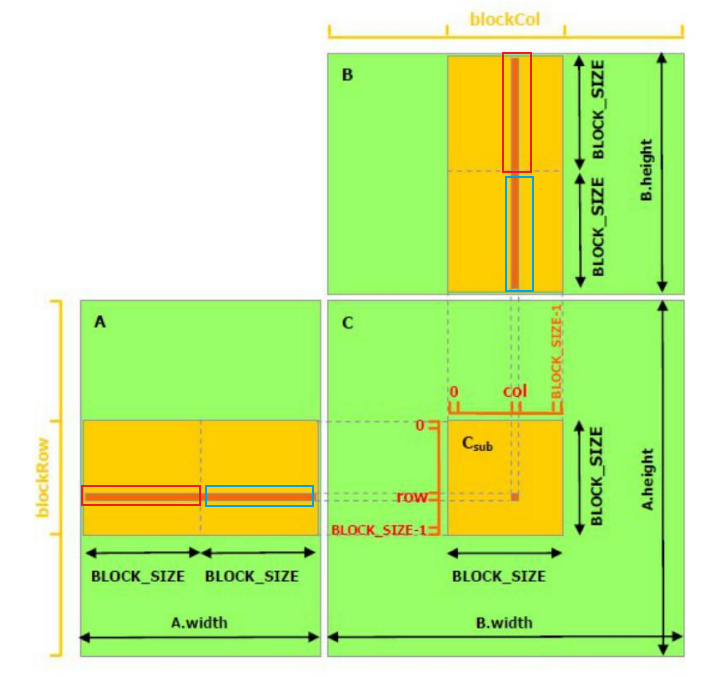
4、多轮计算
以下图为例,C_sub中的某一个元素,并不是一次性计算出来的,需要在for循环外先声明一个Cvalue,然后在for循环的每一轮中累加。在下图中,不同的颜色表示了for循环不同的轮次。所以在第一个轮次结束后,C_sub中的每个元素都只计算了一半的结果出来 ,**同样的,需要有__syncthreads()加锁,等到同block的所有线程执行第一轮计算完毕才会进入下一轮,**待到第二轮完毕,C_sub的元素就整个算出来了。
cpp
float Cvalue = 0.0f;
for (int m = 0; m < (A.width + BLOCK_SIZE - 1) / BLOCK_SIZE; ++m) { // (A.width + BLOCK_SIZE - 1) / BLOCK_SIZE是A.width/BLOCK_SIZE向上取整的标准写法,适用所有未知情况。
if (row < A.height && (m * BLOCK_SIZE + tx) < A.width) {
As[ty][tx] = getElement(A, row, m * BLOCK_SIZE + tx);
} else {
As[ty][tx] = 0.0f;
}
if ((m * BLOCK_SIZE + ty) < B.height && col < B.width) {
Bs[ty][tx] = getElement(B, m * BLOCK_SIZE + ty, col);
} else {
Bs[ty][tx] = 0.0f;
}
__syncthreads();
for (int k = 0; k < BLOCK_SIZE; ++k) {
Cvalue += As[ty][k] * Bs[k][tx];
}
__syncthreads();
}5、赋值
for循环结束后,Cvalue的值写入到C矩阵中
cpp
if (row < C.height && col < C.width) {
setElement(C, row, col, Cvalue);
}需要注意row和col的计算
cpp
int row = by * BLOCK_SIZE + ty;
int col = bx * BLOCK_SIZE + tx;它们其实是和划分方式相关的,
cpp
dim3 blockSize(BLOCK_SIZE, BLOCK_SIZE);
dim3 gridSize((K + BLOCK_SIZE - 1) / BLOCK_SIZE,
(M + BLOCK_SIZE - 1) / BLOCK_SIZE);
matrixMulSharedKernel<<<gridSize, blockSize>>>(d_A, d_B, d_C);这里的by,bx是grid中的block的坐标,在上图中,C矩阵中橙色的C_sub的坐标是(1,1),所以我们根据by,bx先找到选中的块,再通过ty、tx找到具体的某个线程,那么C_sub的某个元素的位置也随之确定。
6、stride
这里先理解一下stride是什么
假设有一个3x3的矩阵
[ 1, 2, 3 ] [ 4, 5, 6 ] [ 7, 8, 9 ]
在内存中,是行存储的,
[1, 2, 3, 4, 5, 6, 7, 8, 9]
-
width = 3(每行3个元素) -
height = 3(共3行) -
stride = width = 3(从一行开始到下一行开始需要跨越3个元素)
cpp
index = row * stride + col = 1 * 3 + 2 = 5
elements[5] = 6有时出于内存对齐或性能考虑,我们在每行末尾添加padding:
[1, 2, 3, X, 4, 5, 6, X, 7, 8, 9, X]
假设我们添加了1个元素的padding:
-
width = 3(每行实际数据3个元素) -
height = 3(共3行) -
stride = 4(包含padding后,每行占用4个元素)
cpp
index = row * stride + col = 1 * 4 + 2 = 6
elements[6] = 6在CUDA矩阵乘法内核中,stride 的主要作用有:
-
处理子矩阵 :如果
mat是一个更大矩阵的子矩阵,stride等于原始矩阵的宽度,而不是子矩阵的宽度。 -
内存对齐 :CUDA性能优化通常要求内存地址对齐,使用
stride可以确保每行从对齐的地址开始。 -
灵活的矩阵布局:允许矩阵以不同的步长存储在内存中。
我们这里的stride,其实是定义了对齐方式,这样不论矩阵有没有padding,都可以顺利应对。
原理解析
为什么全局内存方案比共享内存慢?
1、CUDA 存储器层次的延迟 / 带宽差异,以及矩阵乘法的 "访存局部性" 被全局内存浪费。
CUDA 存储器的延迟和带宽呈数量级差距,以下是典型架构(如 Volta/Turing)的对比:
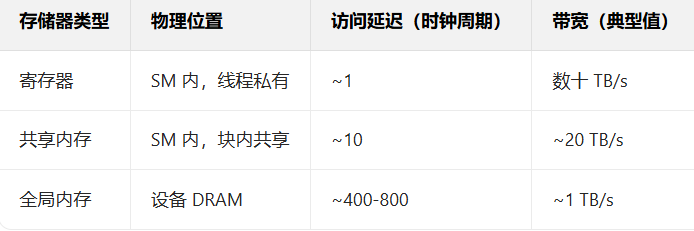
可见:共享内存的延迟是全局内存的 1/40 ~ 1/80,带宽是其 20 倍以上。
2、矩阵乘法的 "重复访存" 问题
矩阵乘法 C = A × B 的核心是 "点积":C[i][j] = Σ(A[i][k] × B[k][j])(k 遍历维度)。假设用 线程 (i,j) 计算 C ij,且未用共享内存:
- 对于 A 矩阵:同一行
A[i][0...N-1]会被计算C[i][0...N-1]的所有线程重复读取(每行被读 N 次); - 对于 B 矩阵:同一列
B[0...N-1][j]会被计算C[0...N-1][j]的所有线程重复读取(每列被读 N 次);
全局内存方案 :每个线程独立从全局内存读取 A/B 的元素,导致同一数据被全局内存重复加载 N 次 ------ 全局内存的低带宽被彻底耗尽,大量时间浪费在 "等数据" 上。
共享内存方案 :将 A、B 矩阵划分为 "子块(Tile)",线程块先一次性从全局内存读取 A 的子块、B 的子块到共享内存(仅读 1 次),然后块内所有线程共享这些数据完成点积计算。→ 全局内存的访问次数从 O(N³) 降至 O(N³ / TileSize),彻底减少重复访存。
3、全局内存的 "非合并访问" 加剧性能损耗
全局内存的带宽只有在合并访问(Coalesced Access) 时才能达到峰值:即同一 warp(32 线程)的连续线程访问全局内存的连续地址。
但矩阵乘法中:
- 读取 A 矩阵的行:天然是连续地址,可合并;
- 读取 B 矩阵的列:线程按列访问时,地址是离散的(步长 = 矩阵宽度),导致非合并访问 ------ 全局内存的有效带宽直接折损(甚至只剩 1/10)。
而共享内存可通过 "转置子块" 等方式,将 B 矩阵的列访问转为共享内存的行访问,既利用共享内存的高带宽,又保证全局内存的合并读取。