基于深度学习的河道垃圾检测系统设计(YOLOv8)
一、研究背景:AI 如何参与河道环境治理?
随着城市化进程加快,河道、湖泊、水库等水体中的塑料垃圾问题日益严峻。其中,塑料瓶因体积明显、数量庞大、难以自然降解,已成为水环境污染治理中的重点对象。
传统河道垃圾监测方式主要存在以下痛点:
- ❌ 人工巡查成本高、效率低
- ❌ 监测结果主观性强,难以量化
- ❌ 无法实现实时、连续监控
- ❌ 难以形成数据闭环支撑决策
在此背景下,基于深度学习的目标检测技术为河道垃圾自动识别提供了新的解决方案。
本项目以 YOLOv8 目标检测模型 为核心,构建了一套 河道塑料瓶智能识别系统 ,并通过 PyQt5 桌面端应用 实现工程级落地,真正做到:
"模型可训练、系统可运行、结果可展示、工程可复现"

源码下载与效果演示
哔哩哔哩视频下方观看: www.bilibili.com/video/BV1un...
包含:
📦完整项目源码
📦 预训练模型权重
🗂️ 数据集地址(含标注脚本

二、系统总体方案设计
2.1 技术路线概览
本系统采用经典但成熟的 AI 工程技术栈:
| 模块 | 技术 |
|---|---|
| 目标检测 | YOLOv8(Ultralytics) |
| 深度学习框架 | PyTorch |
| 图像/视频处理 | OpenCV |
| 图形界面 | PyQt5 |
| 应用形态 | 桌面级智能检测系统 |
整体流程如下:
markdown
图像 / 视频 / 摄像头
↓
YOLOv8 推理模型
↓
塑料瓶目标检测结果
↓
PyQt5 界面实时展示
↓
结果保存 / 数据分析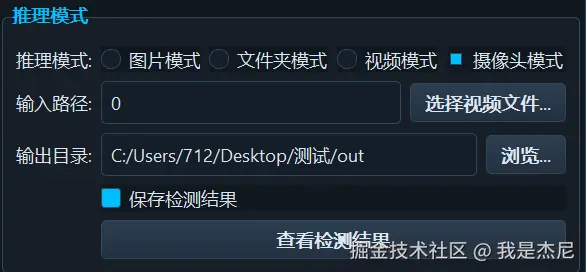
2.2 功能模块划分
系统按功能可拆分为五大核心模块:
-
数据层
- 河道场景塑料瓶数据集
- YOLO 标准标注文件
-
模型层
- YOLOv8 网络结构
- 训练脚本与权重文件
-
推理层
- 单图检测
- 批量图片检测
- 视频流检测
- 摄像头实时检测
-
界面层
- PyQt5 主界面
- 参数配置面板
- 检测结果显示区
-
输出层
- 检测图片/视频保存
- 后续统计分析接口

三、数据集构建与缺陷目标定义
3.1 检测目标说明
本项目当前聚焦 单一核心目标:
text
bottle(塑料瓶)选择单类目标的原因:
- 塑料瓶在河道垃圾中占比高
- 形态特征明显,适合模型快速收敛
- 易扩展为多类垃圾检测(如塑料袋、泡沫等)
3.2 数据集结构设计
采用 YOLO 官方推荐格式,保证与训练脚本无缝兼容:
text
dataset/
├── images/
│ ├── train/
│ └── val/
├── labels/
│ ├── train/
│ └── val/标注文件示例:
text
0 0.5123 0.3681 0.2845 0.4176说明:
0:塑料瓶类别 ID- 后四项:目标在图像中的归一化坐标
3.3 数据集特点分析
河道场景相比常规目标检测更具挑战:
- 🌊 水面反光严重
- 🌿 背景杂乱(植被、漂浮物)
- 📏 塑料瓶尺度变化大
- 📸 拍摄角度复杂(俯视、远景)
这些因素对模型的鲁棒性和泛化能力提出了更高要求。
四、YOLOv8 模型原理与适配分析
4.1 YOLOv8 核心优势
YOLOv8 是 Ultralytics 推出的新一代目标检测模型,主要优势包括:
- ✅ Anchor-Free 架构:减少先验依赖
- ✅ TaskAlignedAssigner:更合理的正样本匹配
- ✅ 高推理速度:适合实时场景
- ✅ 支持多任务扩展:检测 / 分割 / 分类
对于河道垃圾检测这种 实时 + 户外复杂场景 任务,YOLOv8 非常适合。
4.2 环保场景下的模型适配
在实际工程中,YOLOv8 的优势体现在:
- 对小目标(远景塑料瓶)识别能力强
- 在复杂背景下误检率低
- 模型轻量,便于后续边缘端部署
五、模型训练流程与评估方法
5.1 训练命令示例
bash
yolo detect train \
data=river.yaml \
model=yolov8n.pt \
epochs=100 \
batch=16 \
imgsz=640 \
lr0=0.001核心参数解释:
epochs:训练轮次,控制收敛程度batch:显存与训练稳定性的平衡imgsz:输入尺寸,影响小目标检测能力
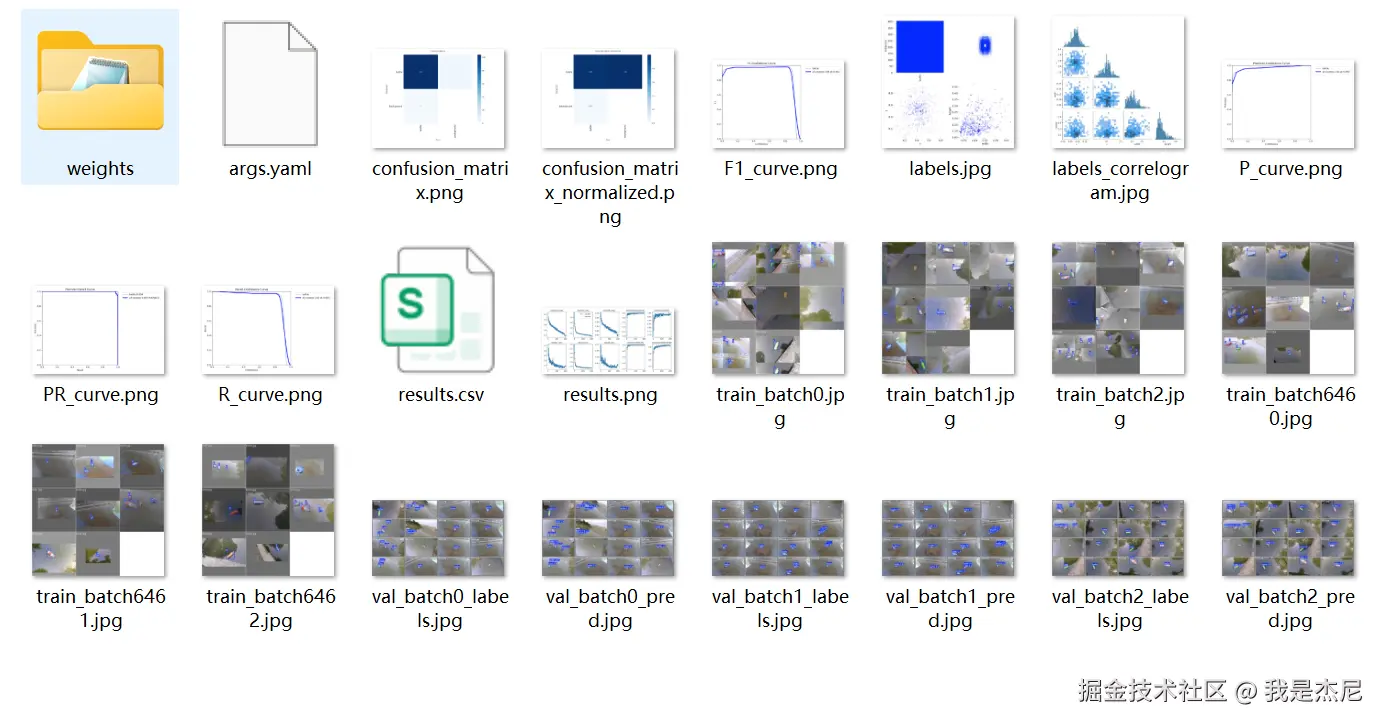
5.2 训练结果评估指标
训练结束后主要关注:
- mAP@0.5
- Loss 曲线收敛情况
- 误检与漏检样本分析
经验上:
当 mAP@0.5 ≥ 90%,模型已具备实际部署价值。
六、模型推理与结果解析
6.1 Python 推理示例
python
from ultralytics import YOLO
model = YOLO("best.pt")
results = model("river.jpg", conf=0.25, save=True)
for r in results:
for box in r.boxes:
print(box.cls, box.conf)模型输出包括:
- 类别 ID
- 置信度
- 边框坐标
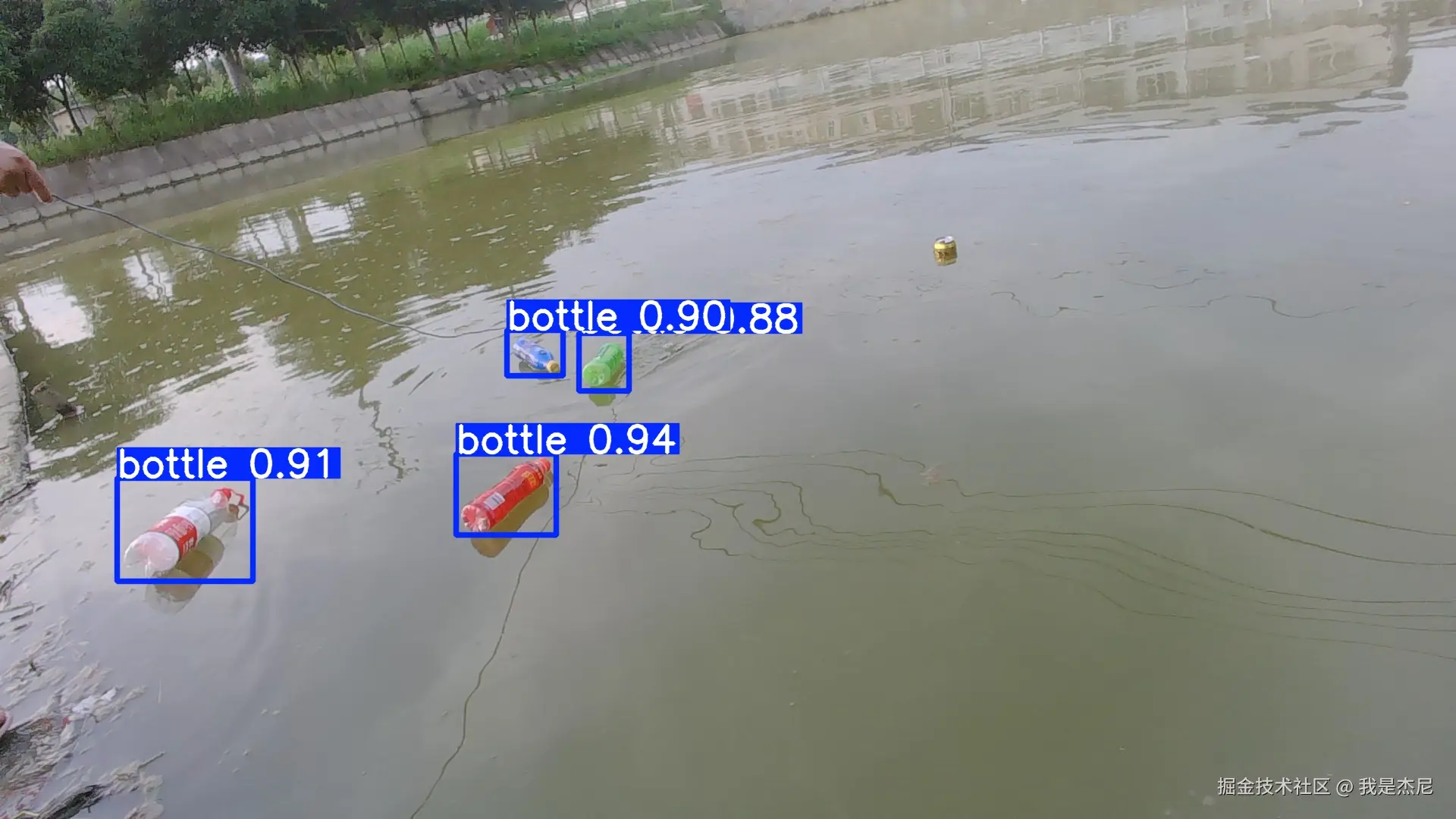
6.2 结果可视化效果
系统自动输出 带检测框与置信度标签的图像/视频,便于:
- 人工复核
- 数据留存
- 后续统计分析
七、PyQt5 桌面系统设计与集成
7.1 界面功能概览
PyQt5 桌面端提供完整的用户操作闭环:
- 📷 图片检测
- 📁 文件夹批量检测
- 🎥 视频检测
- 📡 摄像头实时识别
- 💾 结果保存开关
用户无需编写任何代码即可使用模型能力。
7.2 程序运行方式
bash
python main.py系统启动后自动加载模型权重,进入检测界面。
八、工程应用价值分析
8.1 典型应用场景
- 河道巡检无人值守监测
- 环保部门辅助决策
- AI+环保科研实验
- 计算机视觉毕业设计
8.2 项目核心优势总结
- ✅ 完整工程闭环
- ✅ 模型 + 界面一体化
- ✅ 高复现性,低使用门槛
- ✅ 具备真实环保应用价值
九、未来可拓展方向
-
多类垃圾识别
- 塑料袋 / 泡沫 / 易拉罐
-
边缘设备部署
- Jetson / 树莓派
-
统计分析模块
- 垃圾数量趋势分析
-
无人机 + AI 联动
- 空中巡检河道垃圾
十、结语
本项目不仅是一个 YOLOv8 目标检测实战案例 ,更是一套 可直接服务于环保场景的智能识别系统原型。
它证明了: AI 不只是实验室里的模型,也可以成为改善现实环境的技术力量。
如果你正在寻找一个 AI + 环保 + 工程落地 的完整项目,这个系统可以直接作为你的起点。