论文标题:CSAM: A 2.5D Cross-Slice Attention Module for Anisotropic Volumetric Medical Image Segmentation
论文原文 (Paper) :https://openaccess.thecvf.com/content/WACV2024/html/Hung_CSAM_A_2.5D_Cross-Slice_Attention_Module_for_Anisotropic_Volumetric_Medical_WACV_2024_paper.html
代码 (code) :https://github.com/aL3x-O-o-Hung/CSAM
GitHub 仓库链接(包含论文解读及即插即用代码) :https://github.com/AITricks/AITricks
哔哩哔哩视频讲解 :https://space.bilibili.com/57394501?spm_id_from=333.337.0.0
目录
-
-
- [1. 核心思想](#1. 核心思想)
- [2. 背景与动机](#2. 背景与动机)
-
- [2.1 文本背景总结](#2.1 文本背景总结)
- [2.2 动机图解分析](#2.2 动机图解分析)
- [3. 主要创新点](#3. 主要创新点)
- [4. 方法细节](#4. 方法细节)
-
- [4.1 整体网络架构](#4.1 整体网络架构)
- [4.2 核心创新模块详解:CSAM (Cross-Slice Attention Module)](#4.2 核心创新模块详解:CSAM (Cross-Slice Attention Module))
- [4.3 理念与机制总结](#4.3 理念与机制总结)
- [4.4 图解总结](#4.4 图解总结)
- [5. 即插即用模块的作用](#5. 即插即用模块的作用)
- [6. 实验部分简单分析](#6. 实验部分简单分析)
- [7. 获取即插即用代码关注 【AI即插即用】](#7. 获取即插即用代码关注 【AI即插即用】)
-
1. 核心思想
本文针对医学图像(如 MRI)中普遍存在的**各向异性(Anisotropic)问题(即层间分辨率远低于平面内分辨率),提出了一种名为 CSAM (Cross-Slice Attention Module) 的轻量级即插即用模块。该模块旨在弥补纯 2D 方法缺乏体积信息和纯 3D 方法在各向异性数据上参数冗余且效果不佳的缺陷。其核心是通过语义(通道)、位置(空间)和切片(深度)**三个维度的注意力解耦,以极少的参数量捕获跨切片的上下文依赖,实现高效的 2.5D 分割。
2. 背景与动机
2.1 文本背景总结
在临床医学影像中,为了平衡扫描时间和信噪比,MRI 图像通常是各向异性的,即切片厚度(Through-plane)远大于像素间距(In-plane)。
- 3D 方法的局限:直接使用 3D CNN(如 3D U-Net)假设数据是各向同性的,这导致在 Z 轴上卷积核学习困难,且参数量巨大,容易在小样本医疗数据上过拟合。
- 2D 方法的局限:逐层分割完全忽略了人体器官的 3D 连续性,导致分割结果在 Z 轴上不连贯。
- 2.5D 方法的现状:现有的 2.5D 方法(如输入相邻的多张切片)通常只是简单堆叠通道,缺乏深度的特征交互机制。
2.2 动机图解分析
看图说话与痛点分析:
- 左侧 (2D Approach):模型只看单张切片,完全丢失了上下层的信息(Volumetric Information Loss),容易导致器官边缘判定错误。
- 中间 (3D Approach):模型试图构建一个立体的感受野,但由于数据在 Z 轴被拉伸(各向异性),标准的 3D 卷积核难以适应这种形变,且计算开销巨大(Inefficient)。
- 右侧 (Ours - CSAM) :本文提出的方法。输入是一个切片堆栈(Stack),但不是像 3D 那样暴力卷积,而是通过一个专门的跨切片注意力模块 来提取层间关系。它精准地定位了问题的核心:如何在保留 2D 高分辨率特征的同时,引入 Z 轴的关联性?
3. 主要创新点
- CSAM 模块:设计了一个轻量级的跨切片注意力模块,能够从语义、位置和切片三个维度聚合特征,有效解决了各向异性数据的分割难题。
- 极低的参数量:相比于现有的 3D 注意力机制或 RNN 融合模块,CSAM 引入的参数量几乎可以忽略不计(minimal trainable parameters),极大地降低了模型过拟合的风险。
- 多尺度集成:该模块可以灵活地集成到 CNN 的深层特征提取阶段,利用多尺度特征图来捕获不同层级的上下文信息。
- SOTA 性能:在三个公共医学数据集(前列腺、海马体等)上,验证了该方法优于现有的 2D、3D 以及其他 2.5D SOTA 方法。
4. 方法细节
4.1 整体网络架构
数据流详解 :
模型整体采用经典的 Encoder-Decoder (U-Net Like) 架构,但在输入和中间层做了特殊设计:
- 输入 (Input) :输入不再是单张图像,而是 S S S 张相邻切片组成的堆栈(例如 S = 3 S=3 S=3 或 5 5 5)。
- 编码器 (Encoder) :使用标准的 2D CNN(如 ResNet 或 EfficientNet)作为骨干。注意,这里的卷积是逐切片共享权重的,或者将 S S S 视为通道维度的扩展。
- 核心组件:CSAM 插入 :在编码器的瓶颈处(Bottleneck)或者解码器的不同尺度上,插入 CSAM 模块 。这是特征发生 3D 交互的关键场所。
- 特征图维度变化: B × C × S × H × W B \times C \times S \times H \times W B×C×S×H×W。CSAM 接收这个 5D 张量(在 Batch 维度隐含 S 或显式 S),并在内部进行跨切片融合。
- 解码器 (Decoder) :经过 CSAM 增强后的特征被送入解码器,最终输出针对中心切片的分割预测图。
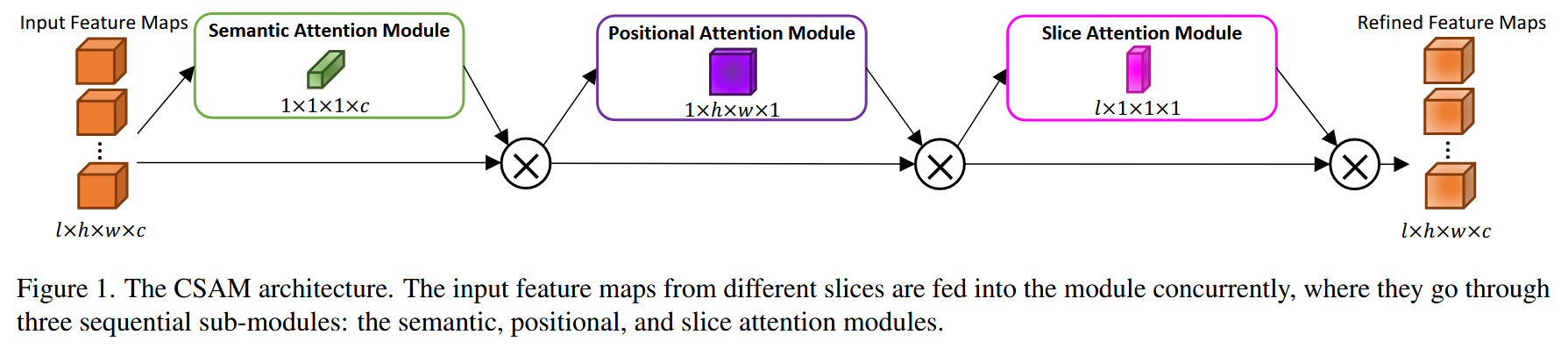
4.2 核心创新模块详解:CSAM (Cross-Slice Attention Module)
CSAM 的设计灵感来源于将复杂的 3D 注意力分解为三个正交的轻量级注意力分支:
-
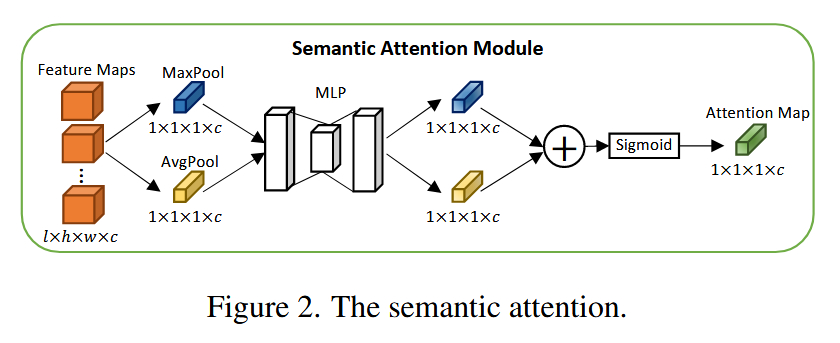
分支 A:语义注意力 (Semantic Attention)
- 流动 :输入特征 F F F。在空间 ( H , W ) (H, W) (H,W) 和切片 ( S ) (S) (S) 维度上进行 Global Average Pooling。
- 目的 :生成一个 1 × C × 1 × 1 1 \times C \times 1 \times 1 1×C×1×1 的权重向量。它关注**"什么特征"**(What)在当前的一组切片中是最重要的(例如,增强肿瘤组织的通道响应)。
-
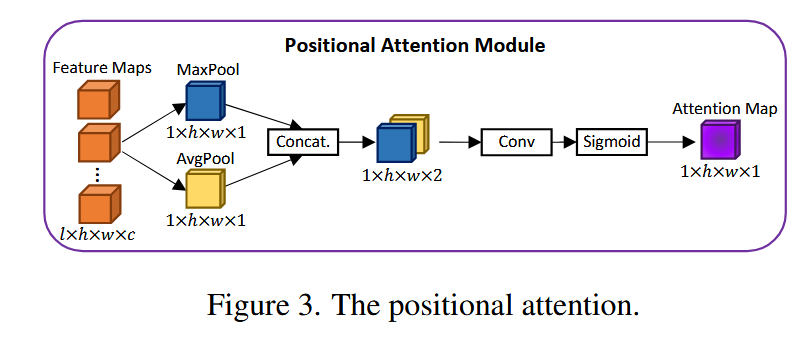
分支 B:位置注意力 (Positional Attention)
- 流动 :在通道 ( C ) (C) (C) 和切片 ( S ) (S) (S) 维度上进行 Max Pooling 或 Average Pooling。
- 目的 :生成一个 1 × 1 × H × W 1 \times 1 \times H \times W 1×1×H×W 的空间热力图。它关注**"哪里"**(Where)是目标区域,利用相邻切片的信息来抑制当前切片的背景噪声(例如,确定的器官边界)。
-
分支 C:切片注意力 (Slice Attention) ------ 核心创新
- 流动 :在空间 ( H , W ) (H, W) (H,W) 和通道 ( C ) (C) (C) 维度上进行压缩。
- 目的 :生成一个 1 × 1 × S × 1 1 \times 1 \times S \times 1 1×1×S×1 的深度权重向量。
- 机制:它显式地计算相邻切片对中心切片的重要性。例如,如果相邻切片包含清晰的边界,它的权重就会增加,从而辅助中心切片的分割。这是解决各向异性问题的关键一环。
-
特征融合:三个分支生成的权重分别通过 Sigmoid 激活后,与原始特征进行逐元素相乘(Element-wise Multiplication),实现全方位的特征校准。
4.3 理念与机制总结
CSAM 的理念是 "维度解耦 (Dimension Decomposition)"。
- 机制 :与其计算昂贵的 ( H × W × S ) × ( H × W × S ) (H \times W \times S) \times (H \times W \times S) (H×W×S)×(H×W×S) 全局注意力矩阵,不如将其拆解为 Channel、Spatial、Depth 三个独立的 1D/2D 注意力。
- 公式解读 : F o u t = F i n ⊗ M s e m a n t i c ⊗ M p o s i t i o n a l ⊗ M s l i c e F_{out} = F_{in} \otimes M_{semantic} \otimes M_{positional} \otimes M_{slice} Fout=Fin⊗Msemantic⊗Mpositional⊗Mslice。
- 这种设计既保留了 3D 上下文,又将参数量控制在与 2D 模型几乎持平的水平。
4.4 图解总结
回到"动机图解"的核心问题:
- Slice Attention 解决了 2D 模型"看不见邻居"的问题。
- Positional Attention 解决了各向异性导致的空间对齐难题(利用 2D 强先验)。
- 整体轻量化设计解决了 3D 模型"参数爆炸"的问题。
5. 即插即用模块的作用
CSAM 是一个高度模块化的单元,适用于多种医疗影像任务:
- 适用场景 :
- 各向异性数据分割:前列腺 MRI、脊柱 MRI、海马体分割等,层厚较厚的数据。
- 序列数据分析:甚至可以推广到视频分割任务中,处理时序依赖。
- 具体应用 :
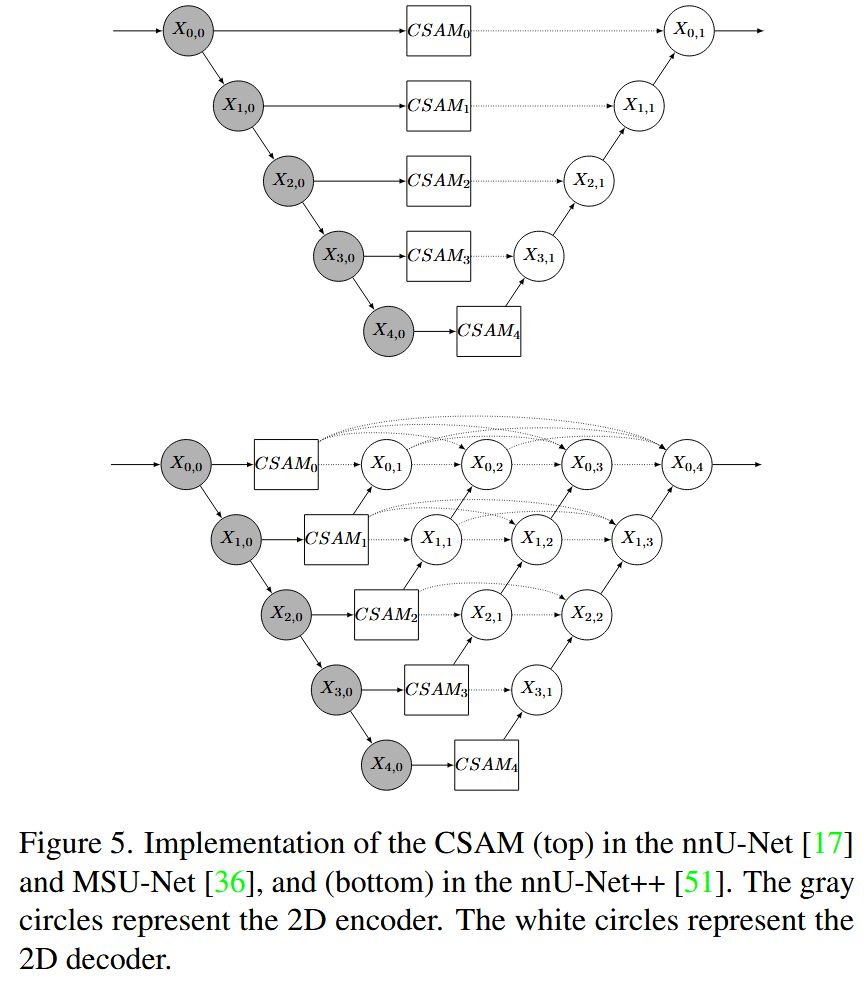
- 改进 U-Net:可以将 CSAM 插入到 nnU-Net 的 2D 版本中,在不增加推理显存压力的前提下,提升 Z 轴的分割连续性。
- 多模态融合:在处理 MRI 不同序列(T1, T2)时,CSAM 也可以作为一种模态间的特征筛选器。
6. 实验部分简单分析
论文在 MSD Prostate (前列腺) , Promise12 , 和 MSD Hippocampus (海马体) 三个数据集上进行了验证。
- 定量对比 :
- 在 Prostate 数据集上,CSAM 取得了 Dice Score 的显著提升,超越了标准的 2D U-Net 和 3D U-Net。
- 特别是在 HD95 (Hausdorff Distance) 指标上表现优异,这说明 CSAM 生成的边界更加平滑、准确,有效减少了层间"断层"现象。
-
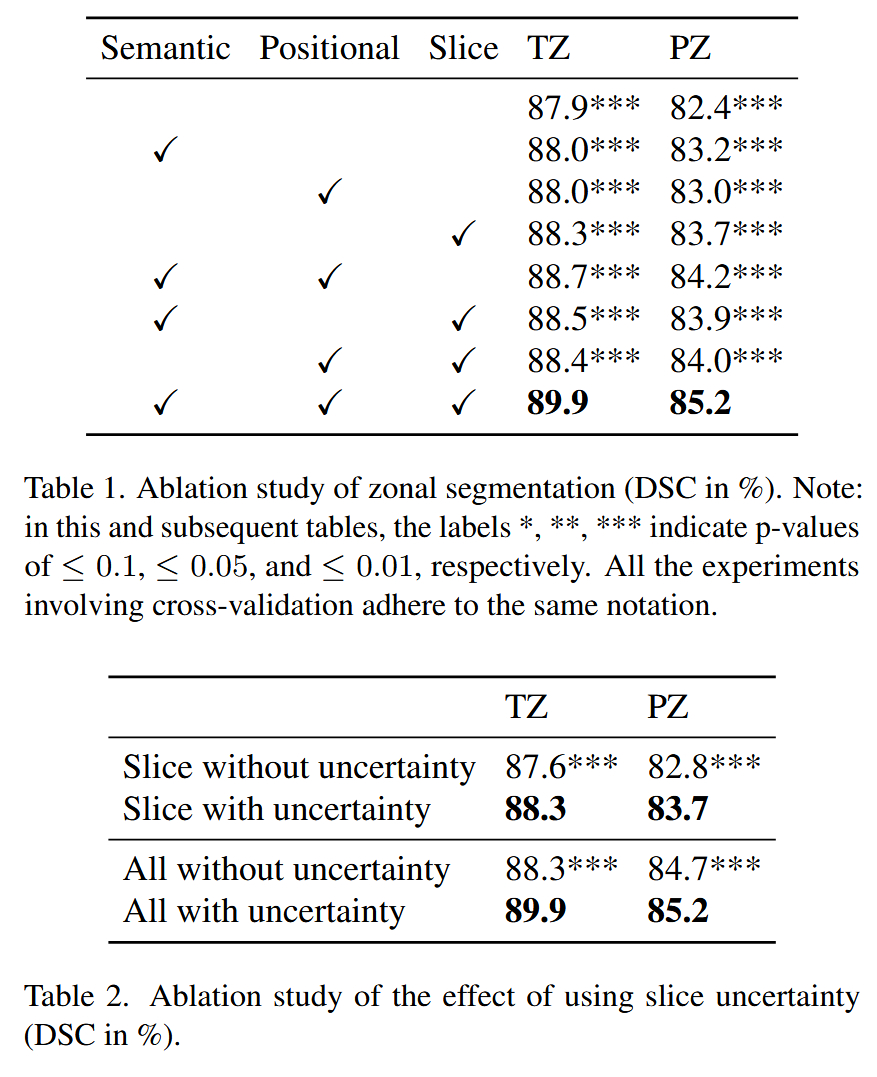
消融实验:
- 作者分别移除了 Semantic、Positional 和 Slice 注意力。结果显示,Slice Attention 的贡献最大,直接证明了在各向异性数据中,显式建模层间关系是提升性能的关键。
-
可视化分析:
- 从分割结果的 3D 重建图可以看出,CSAM 的结果在 Z 轴上非常连续,而 2D 方法则呈现出明显的"阶梯状"伪影。
到此,所有的内容就基本讲完了。如果觉得这篇文章对你有用,记得点赞、收藏并分享给你的小伙伴们哦😄。