本文看图说话,对相关问题进行说明
下图为传统的规格模型工作流,端到端模型是传感器层直接到执行层。
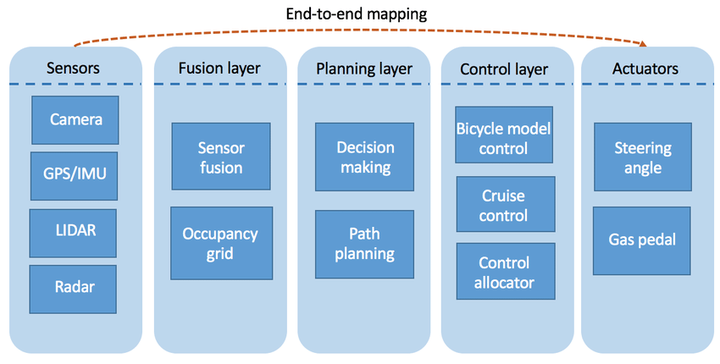
添加图片注释,不超过 140 字(可选)
下图为规则模型 vs 端到端模型 vs 混淆模型
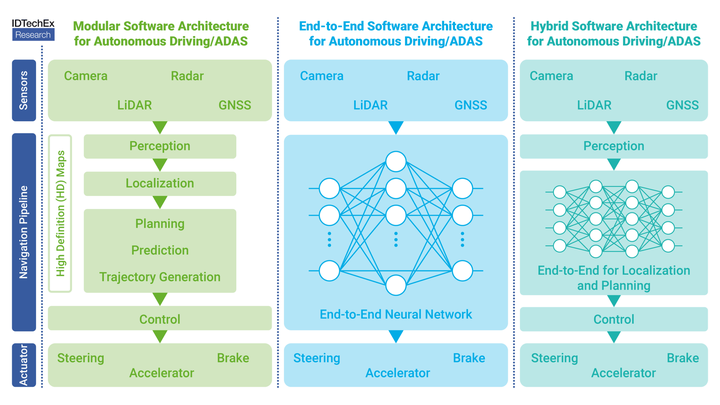
添加图片注释,不超过 140 字(可选)
https://www.edge-ai-vision.com/2025/07/is-end-to-end-the-endgame-for-level-4-autonomy/
下图为感知端到端 到 模块化端到端 到 一段式端到端
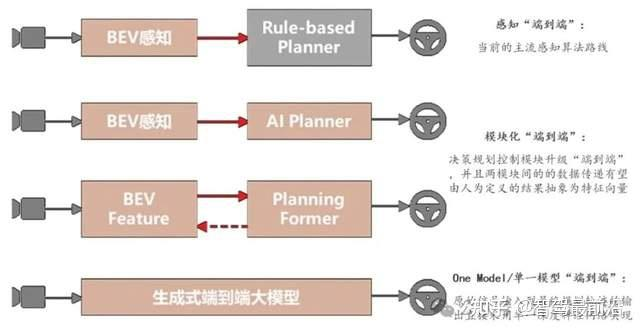
添加图片注释,不超过 140 字(可选)
2024城市NOA产研报告发布:谁是第三方智驾供应商之首? - 车东西
雪岭 · 20个重点"端到端"玩家------1.7万字方案简介(2/2)
整体融合框架
下图为目标级融合框架
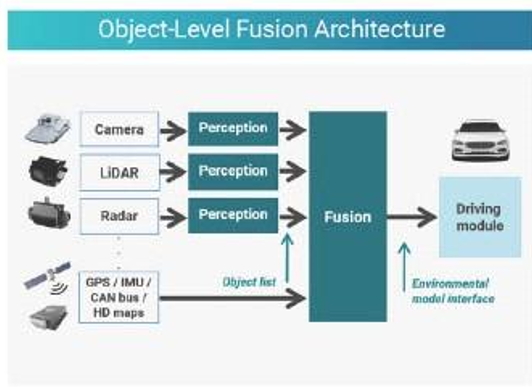
添加图片注释,不超过 140 字(可选)
下图为前融合框架
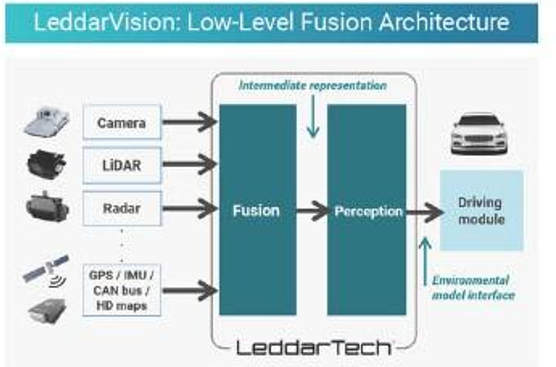
添加图片注释,不超过 140 字(可选)
https://www.linkedin.com/pulse/object-level-sensor-fusion-vs-raw-data-adas-prateek-chawda-k4rjf/
下图为raw data 级融合框架
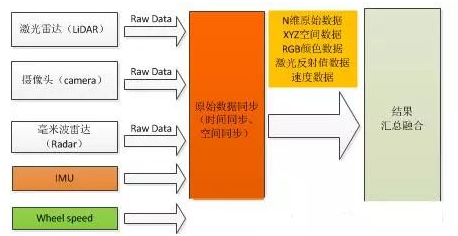
添加图片注释,不超过 140 字(可选)
多传感器融合(三) - 吴建明wujianming - 博客园
下图为GNSS IMU融合框架
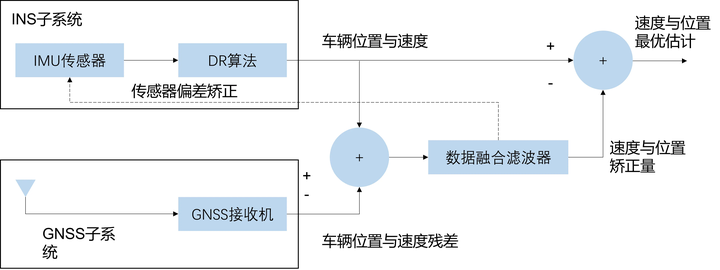
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
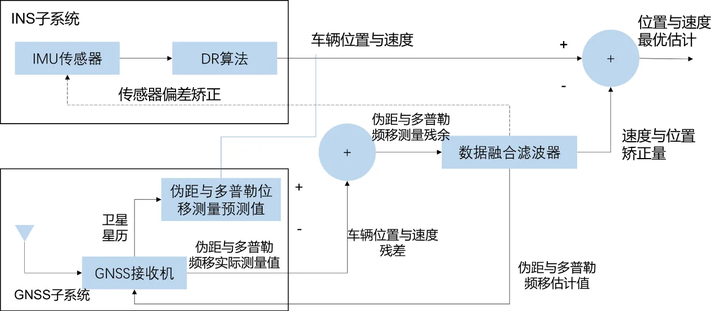
添加图片注释,不超过 140 字(可选)
https://www.42how.com/article/7358
下图为GNSS算法流程
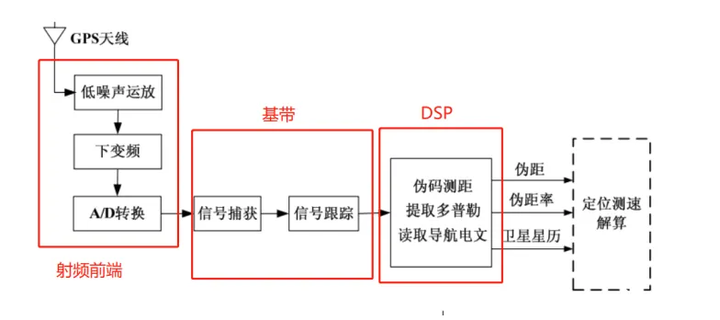
添加图片注释,不超过 140 字(可选)
下图为多源融合导航流程
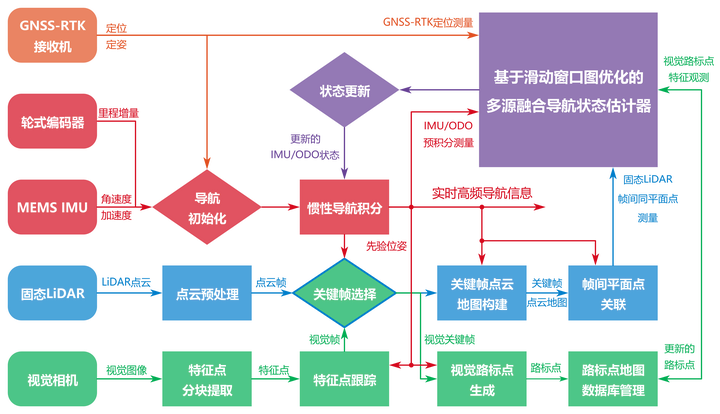
添加图片注释,不超过 140 字(可选)
下图为GNSS波形产生流程
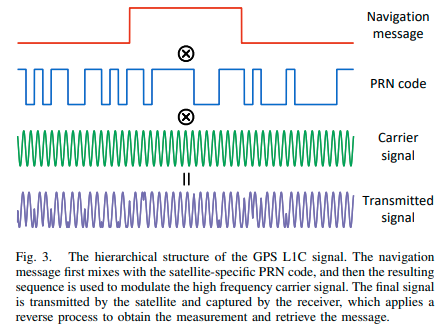
添加图片注释,不超过 140 字(可选)
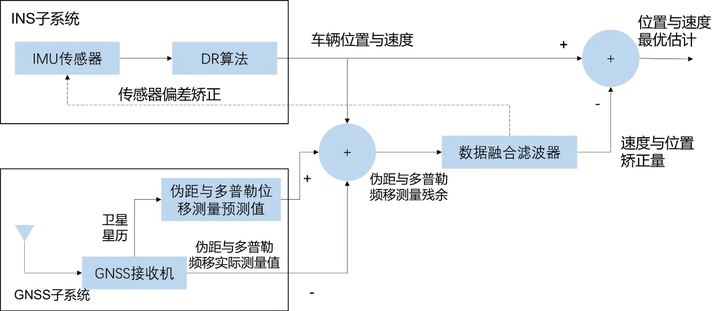
下图为GNSS+IMU+RTK
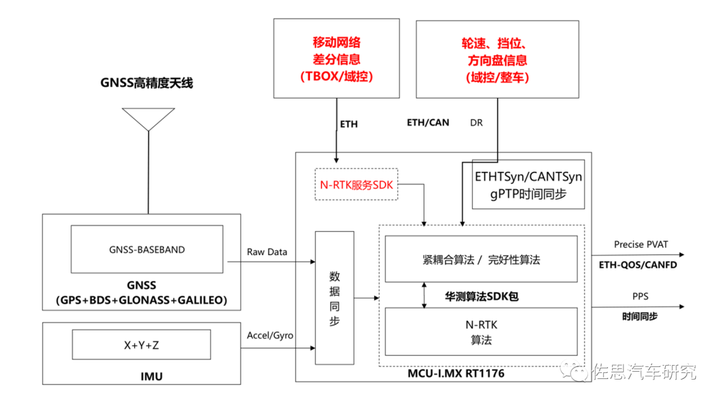
添加图片注释,不超过 140 字(可选)