目录
[4.2 反馈线性化控制](#4.2 反馈线性化控制)
1.课题概述
反馈线性化是一种非线性控制方法,核心思想是通过状态反馈和坐标变换,将非线性系统的动力学模型转化为完全可控的线性系统,再设计线性控制器实现高精度轨迹跟踪。本文研究了双连杆机器人基于反馈线性化的轨迹跟踪控制方法。通过非线性状态反馈和坐标变换,将系统动力学转化为完全可控的线性系统,并设计PD控制器实现高精度跟踪。该方法消除了惯性耦合、科氏力和重力影响,但控制效果依赖模型参数精度。研究包含动力学原理分析、控制算法设计及simulink仿真验证。
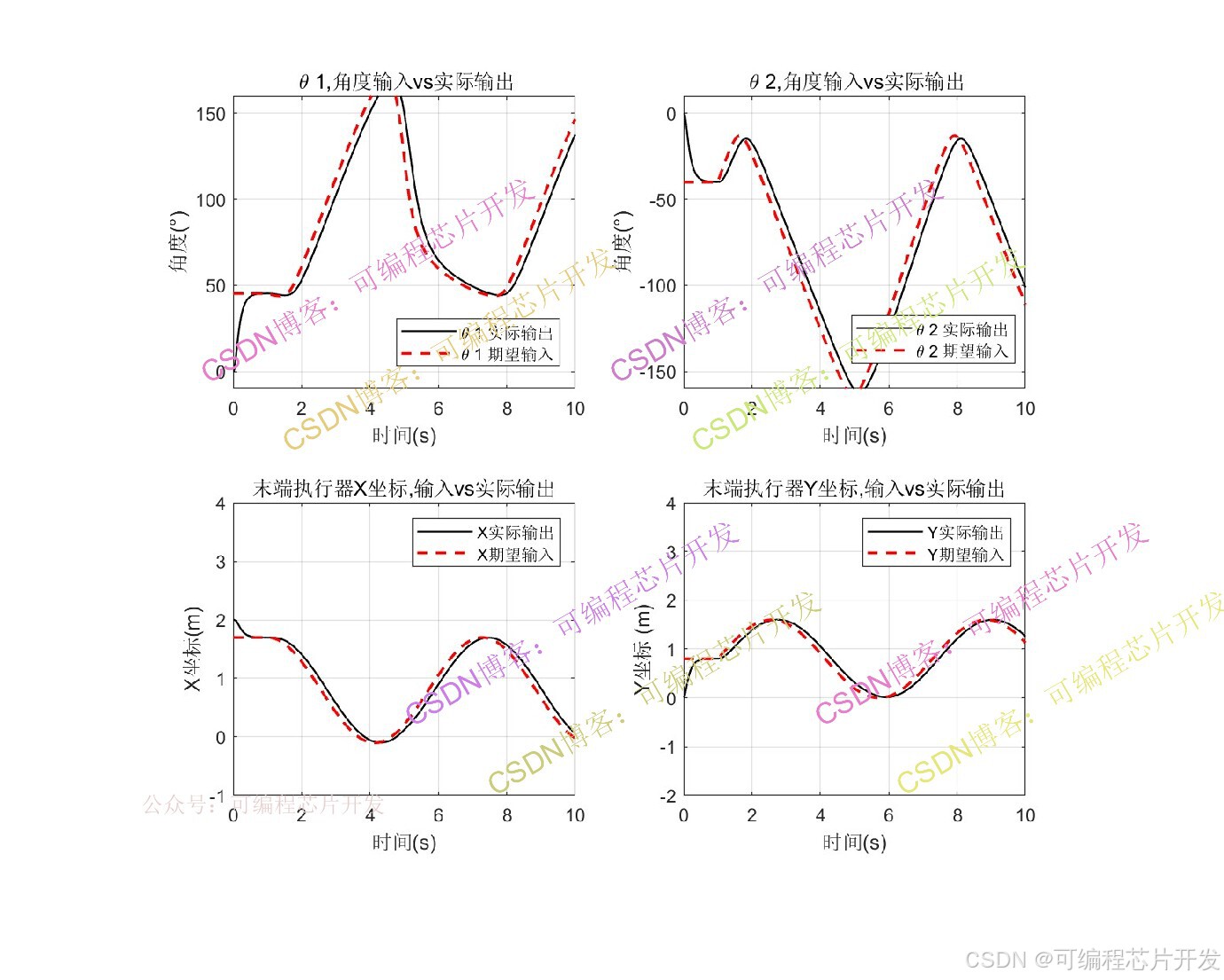
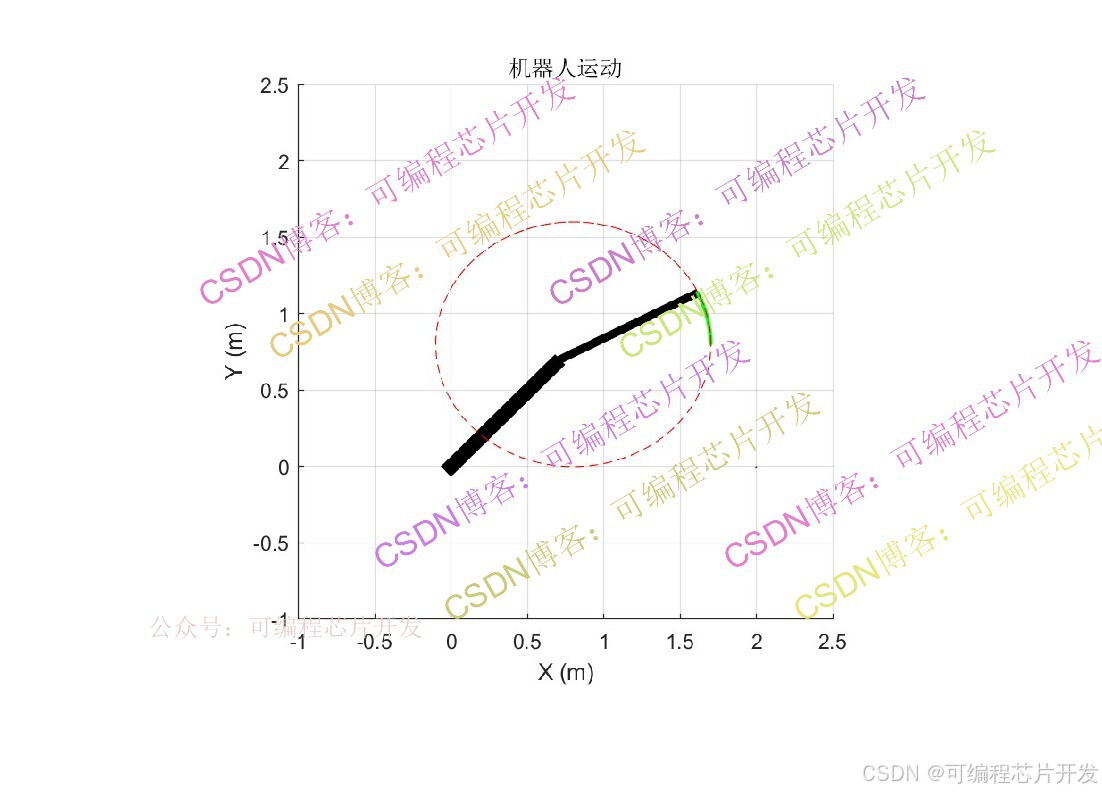
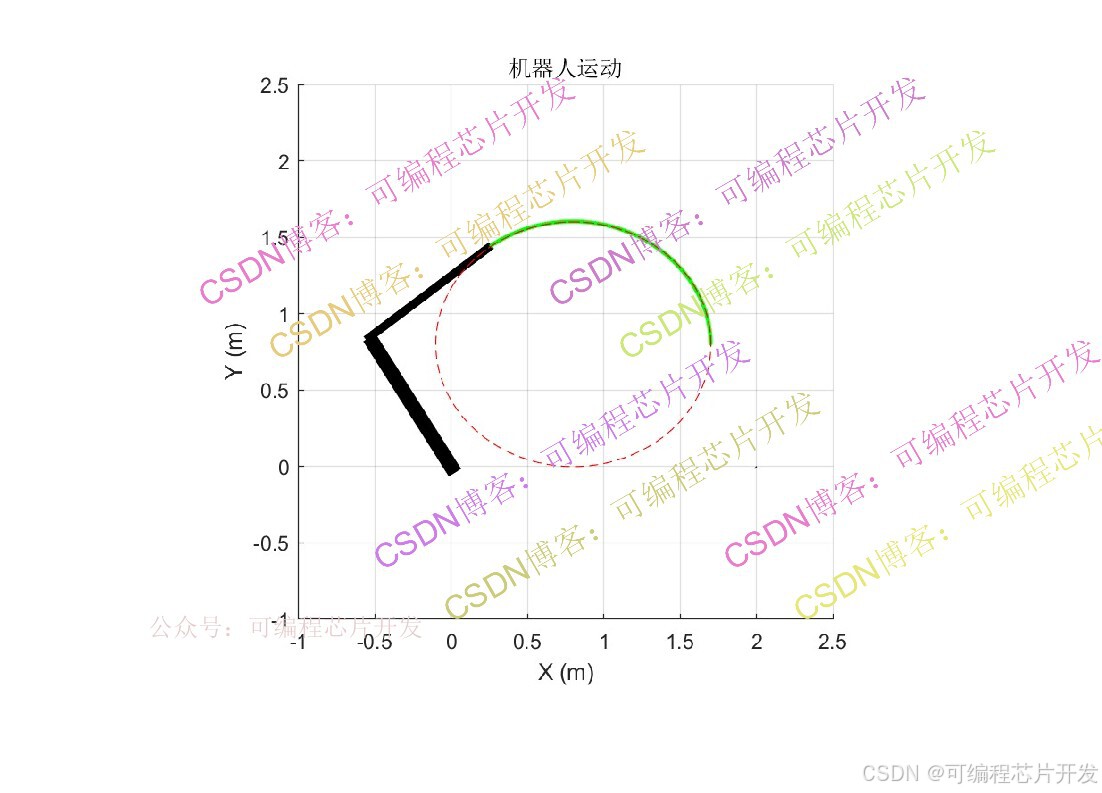
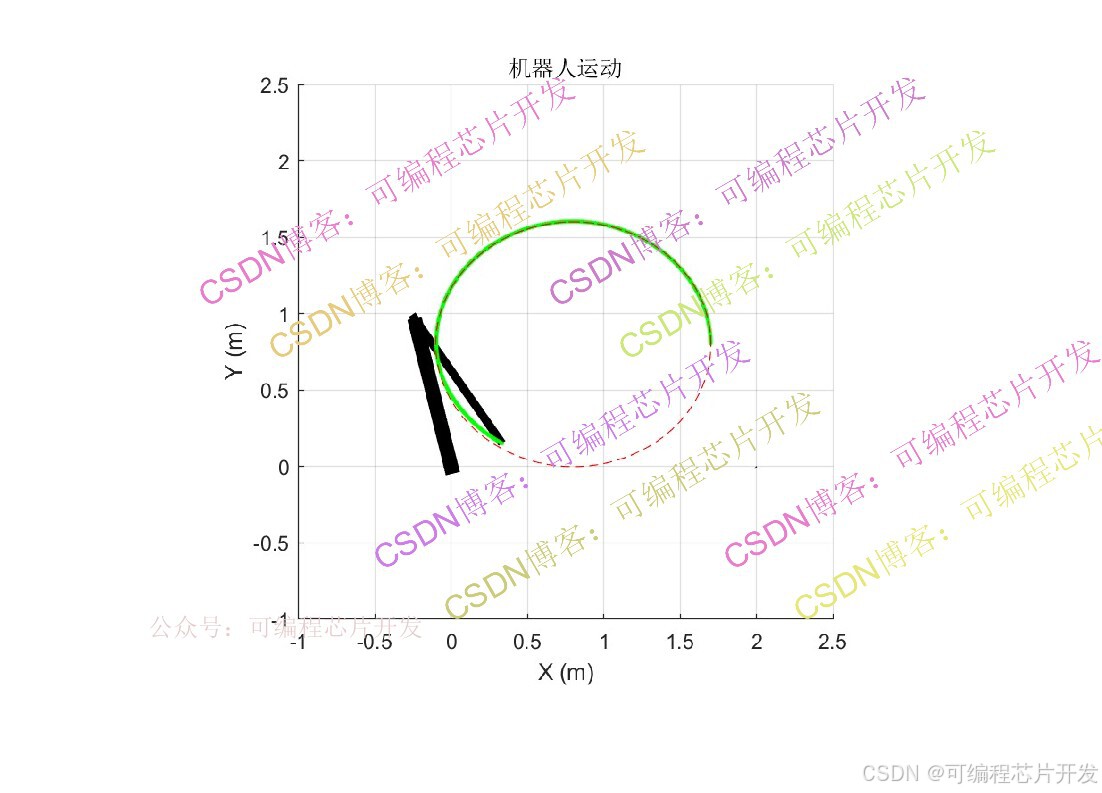
2.系统仿真结果
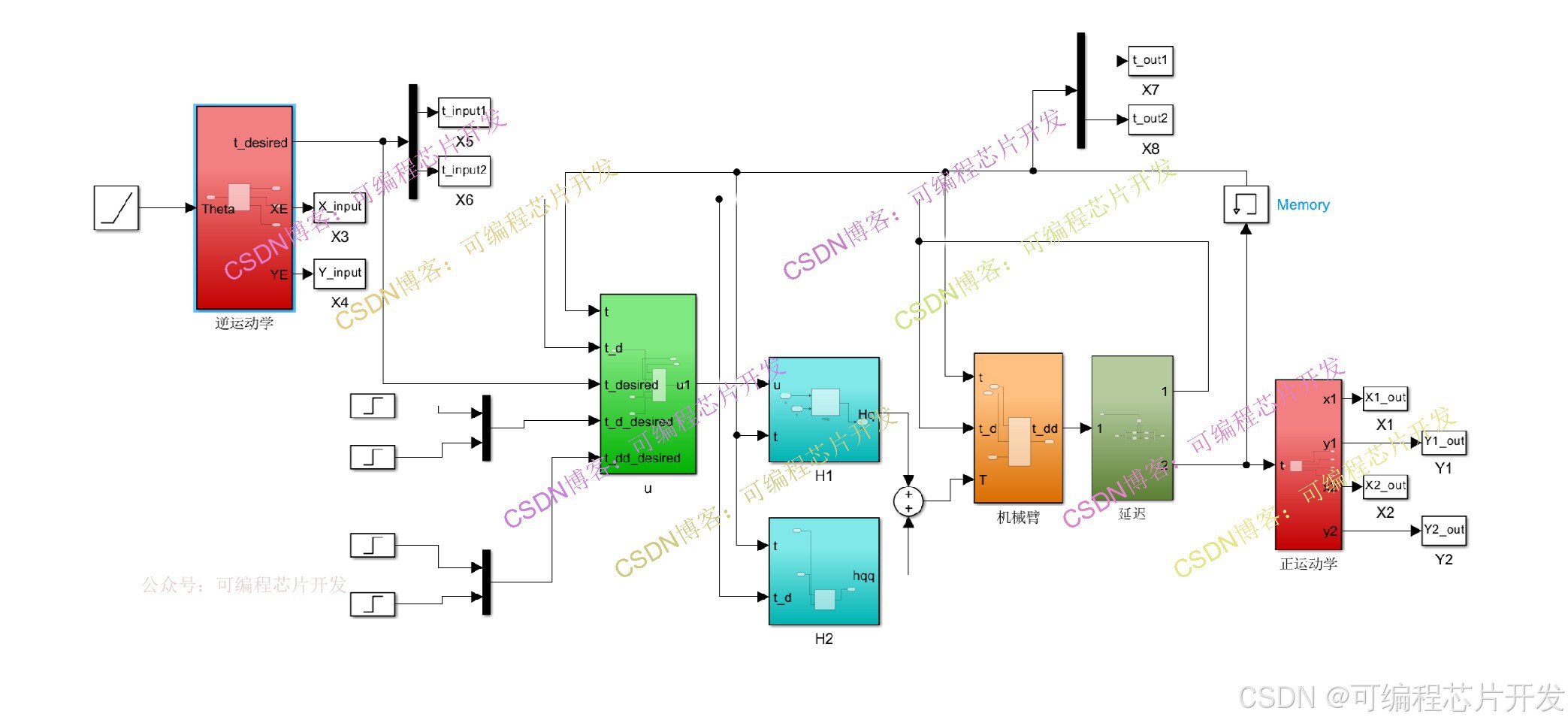
3.核心程序或模型
版本:Matlab2024b
138
4.系统原理简介
4.1双连杆机器人平面运动的动力学原理
设双连杆机器人为旋转关节型,连杆1长度l1、质量m1,连杆2长度l2、质量m2;关节角分别为θ1,θ2,关节角速度θ˙1, θ˙2,关节角加速度θ¨1, θ¨2;关节输入力矩为τ1,τ2。末端执行器的平面坐标(x,y)与关节角的正运动学关系为:

4.2 反馈线性化控制
反馈线性化分为关节空间反馈线性化和操作空间反馈线性化,此处以操作空间轨迹跟踪为例,实现末端执行器的位置控制。
定义输出变量与相对阶
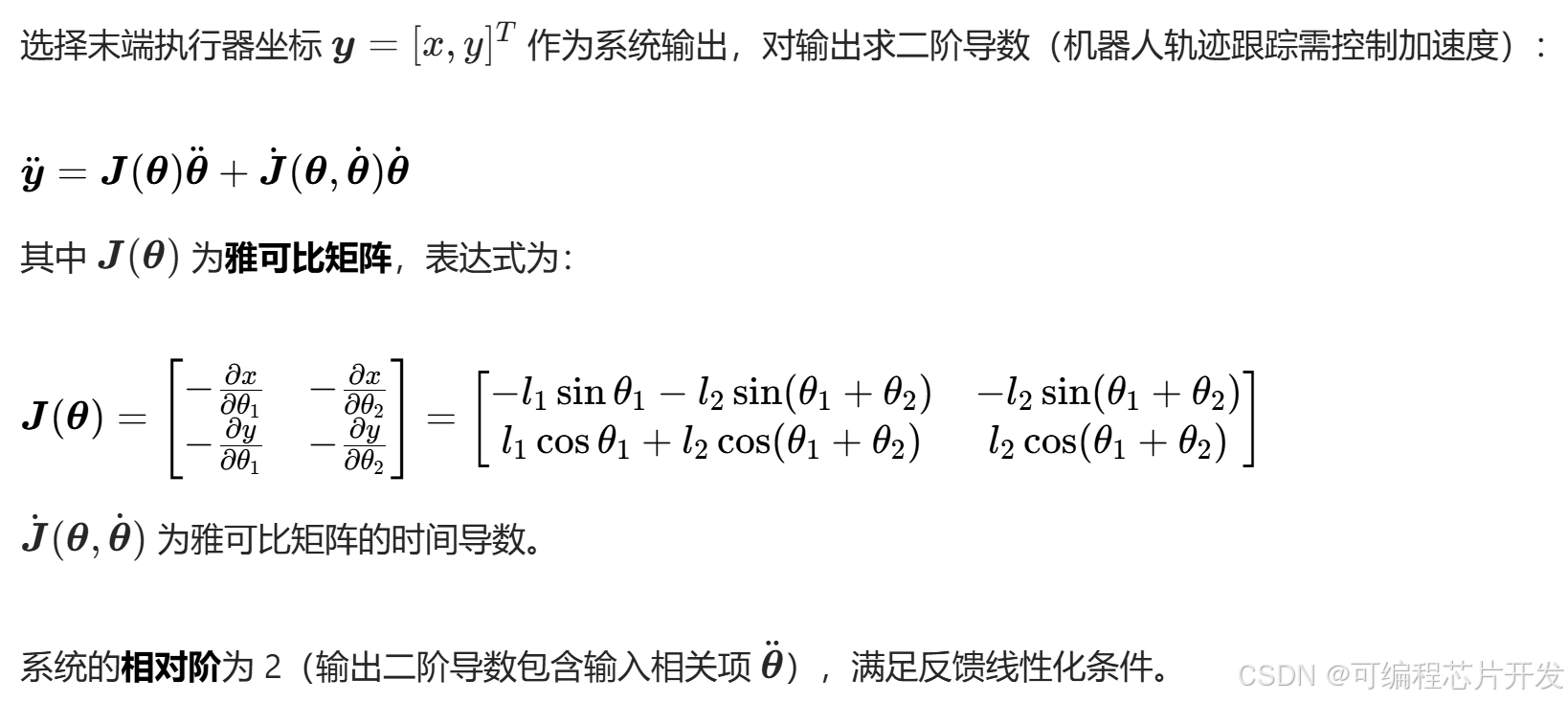
动力学模型的反馈线性化变换
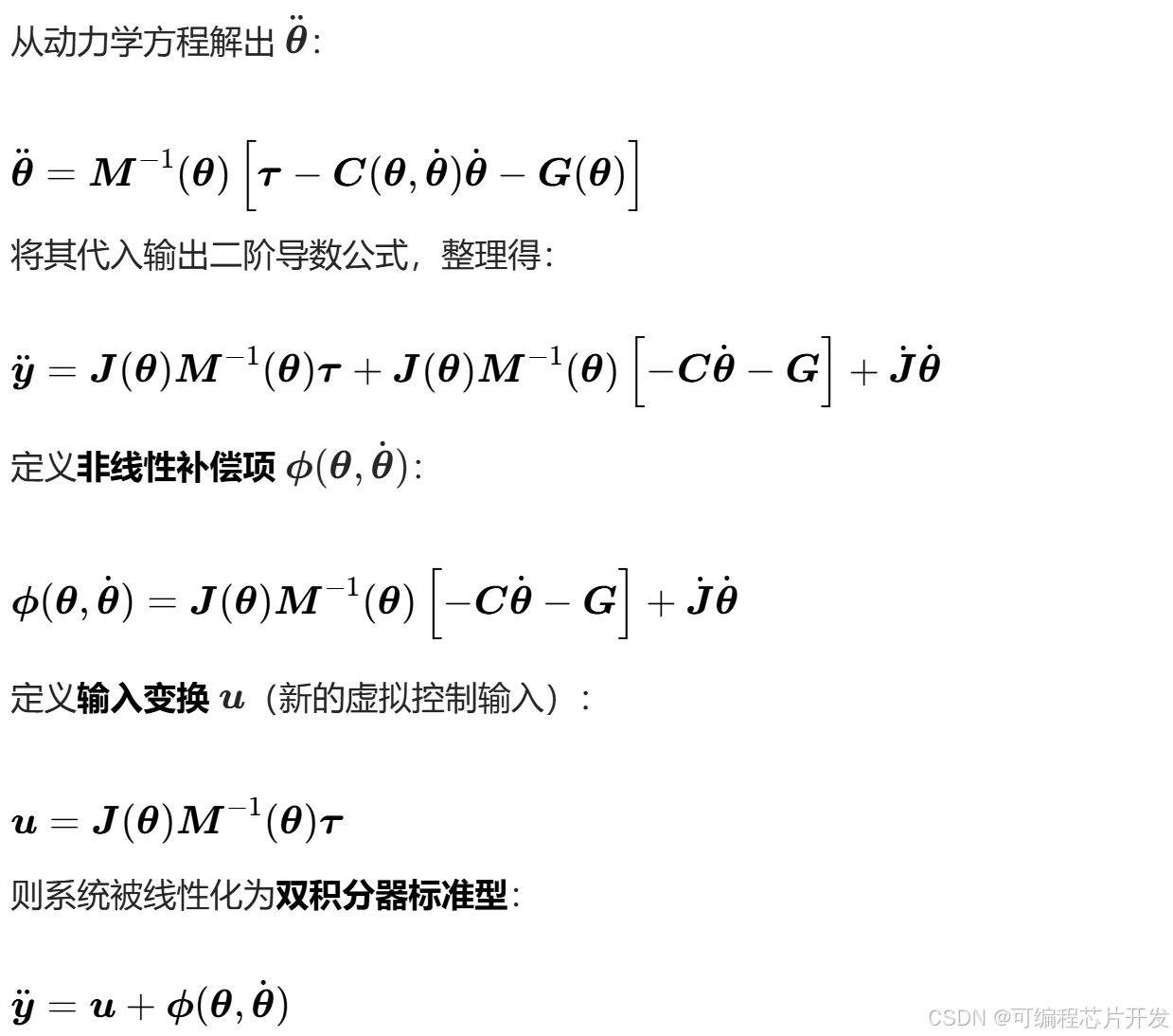
线性控制器设计
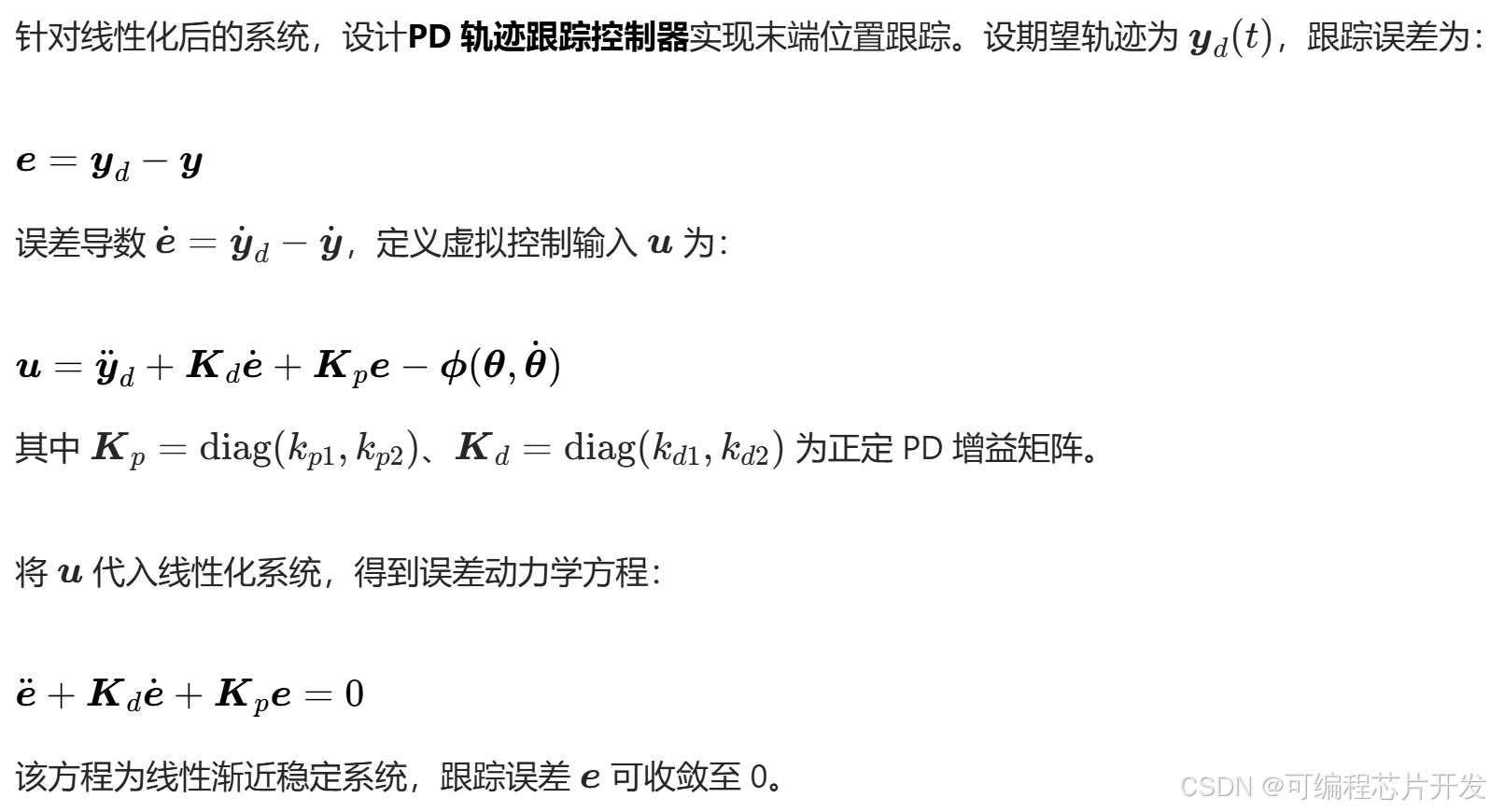
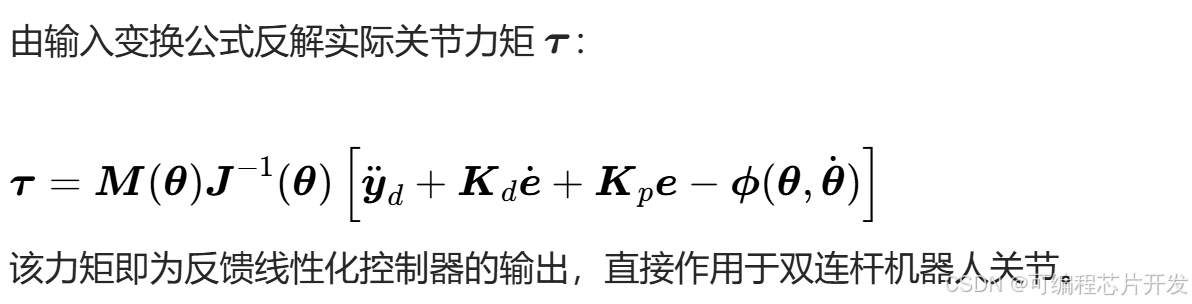
计算实际关节控制力矩
控制方法的特点
完全线性化:通过非线性补偿消除了惯性耦合、科氏力和重力的影响,系统转化为线性系统。
高精度跟踪:PD控制器可保证轨迹跟踪误差渐近收敛,适用于高精度运动控制场景。
依赖模型精度:控制效果取决于动力学模型参数(质量、长度)的准确性,参数摄动会降低控制性能,实际应用中需结合自适应算法补偿参数误差。
5.完整工程文件
v v
关注后,GZH回复关键词: a20