2025睿抗机器人大赛智能侦查赛道省赛全流程------基础了解
智能侦查赛道概述
2025 睿抗机器人大赛智能侦察赛道是 CAIR 工程竞技赛道下的专业国防装备赛项,以无人侦察车为载体、模拟巷战环境开展军事侦察任务,核心培养学生国防意识与科技创新能力且核心硬件均采用国产设备,参赛团队要求 2-6 名学生搭配 1-2 名指导教师,需历经校赛、省赛、全国总决赛阶段,省赛提交项目分析报告、实现视频和 PPT 即可,国赛于 2025 年 8 月 21-22 日开展,比赛场地为 4m×5m 含碎石、草原、沙漠、路障四区及红色圆圈雷区的模拟场景,参赛机器人需完成自主穿越障碍、弯道等路段的导航,识别 A/B/C/D 区域内友军、敌军、人质三类颜色兵人并传回标记图像,在四个打靶点完成精确打击,最后安全返回冲过终点线,硬件采用官方指定国产平台,配备麦克纳姆轮、激光雷达、单目摄像头等,需基于 ROS 系统用 C++/Python 开发,结合 SLAM 定位导航、YOLO 等视觉算法及 STM32 嵌入式开发技术,评分总分 100 分,其中控制电路焊接调试占 20%、机器人现场测试占 60%、技术文档占 20%,触碰场地、反坦克锥、进入雷区等违规行为会相应扣分,严重违规取消成绩,备赛需遵循基础搭建→电路调试→SLAM 建图→目标识别→路径规划→系统集成→联调优化的路线,核心推荐 gmapping/hector_slam 建图、move_base 路径规划、YOLO 目标识别及 PID 控制算法,该赛项技术难度高、综合性强,融合自主导航、机器视觉和精确控制核心技术,很锻炼能力。
新的改变(个人理解)
相比于2024年比赛规则有一个很大的变化就是对仿真的要求拉高了,不限于仿真,可以实物调试,引导参赛队员为国赛任务做提前准备,同时也是希望参赛队员在国赛能取得更好的表现。具体的大家可以自行去官网找规则文件了解。
要求的主要技能
1.ROS基础,尤其是安装和部署一些简单的开源项目
2.C++、Python编程,简单的可以AI辅助完成,集成度高的需要自己编写
3.Linux系统尤其是Ubuntu系统框架理解,尤其是工作空间和功能包以及功能包相互之间的依赖关系
4.借助CSDN或者B站等工具解决问题
学习建议
ROS相关的可以去B站搜索:机器人工匠阿杰 (我就是入门看的他的视频,特别通俗易懂),此外鱼香ROS机器人 和古月居也很棒。其他技能的学习也有很多资源,大家可以自行去找。
全流程下来能实现的最终效果
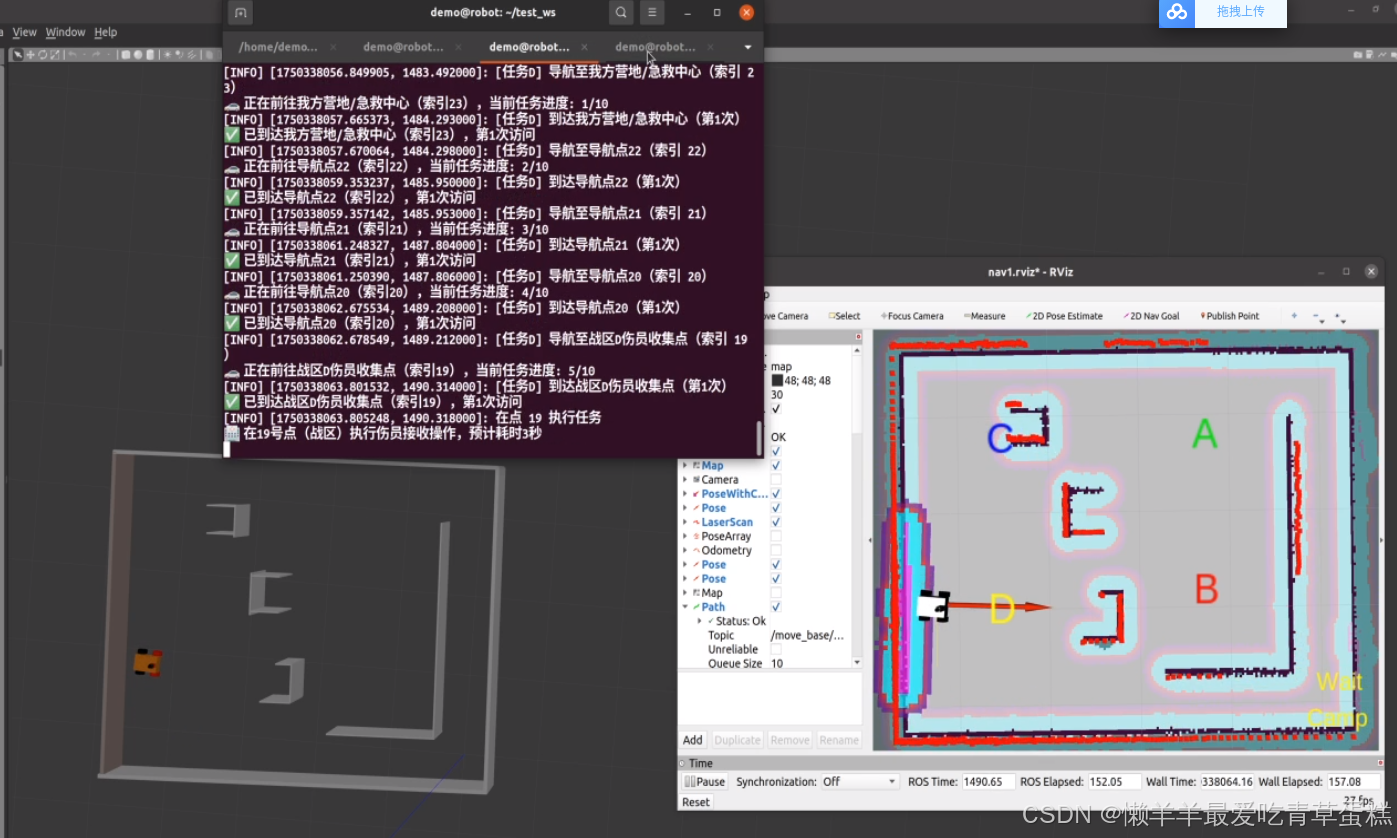 话不多说,接下来将要从零开始复现一下这个场景。此外视觉识别效果如下图
话不多说,接下来将要从零开始复现一下这个场景。此外视觉识别效果如下图
 (视觉是我的队友主要负责的,这里后续只能给个人实际部署的一些建议吧)
(视觉是我的队友主要负责的,这里后续只能给个人实际部署的一些建议吧)
设备环境
Ubuntu 20.04 Desktop+ Noetic + ROS1 + 双系统
CPU:Inter I5
GPU:无