目录
[1. 图像的灰度直方图](#1. 图像的灰度直方图)
[2. 归一化直方图](#2. 归一化直方图)
[3. 类间方差的定义](#3. 类间方差的定义)
[4. 最优阈值的确定](#4. 最优阈值的确定)
[1. 基本用法](#1. 基本用法)
[2. 参数说明](#2. 参数说明)
[3. 与高斯模糊结合使用](#3. 与高斯模糊结合使用)
[1. 多阈值Otsu's算法](#1. 多阈值Otsu's算法)
[2. 改进的Otsu's算法](#2. 改进的Otsu's算法)
[3. 手动实现Otsu's算法](#3. 手动实现Otsu's算法)
[1. 与全局阈值的对比](#1. 与全局阈值的对比)
[2. 与自适应阈值的对比](#2. 与自适应阈值的对比)
[3. 性能对比](#3. 性能对比)
[1. 硬币检测](#1. 硬币检测)
[2. 文档二值化](#2. 文档二值化)
[3. 细胞计数](#3. 细胞计数)
[1. 图像预处理](#1. 图像预处理)
[2. 直方图分析](#2. 直方图分析)
[3. 阈值类型选择](#3. 阈值类型选择)
[4. 处理复杂图像](#4. 处理复杂图像)
一、Otsu's二值化算法概述
Otsu's二值化算法(大津阈值法)是一种自动阈值选择方法,由日本学者大津展之(Nobuyuki Otsu)于1979年提出。它通过最大化类间方差来确定最优阈值,是图像处理中最常用的阈值分割方法之一。
Otsu's算法的基本思想
Otsu's算法假设图像的直方图是双峰的(即包含前景和背景两个区域),并尝试找到一个阈值T,将图像分为两部分,使得这两部分的类间方差最大。类间方差越大,说明前景和背景的分离效果越好。
Otsu's算法的特点
- 自动化:无需手动设置阈值,算法自动计算最优阈值
- 高效性:计算复杂度低,为O(L),其中L是灰度级数量(通常为256)
- 适应性:适用于直方图呈双峰或多峰分布的图像
- 鲁棒性:对噪声和对比度变化有一定的鲁棒性
二、Otsu's算法的数学原理
1. 图像的灰度直方图
假设图像的灰度级为0到L1(通常L=256),则图像的直方图可以表示为:
H = h0, h1, ..., hL1
其中,hi表示灰度值为i的像素数量。
2. 归一化直方图
归一化直方图表示每个灰度值出现的概率:
p_i = h_i / N
其中,N是图像的总像素数量,满足∑p_i = 1。
3. 类间方差的定义
假设选择阈值T将图像分为两部分:
背景区域:灰度值小于等于T的像素
前景区域:灰度值大于T的像素
(1)概率和
背景像素的总概率:
w0(T) = ∑_{i=0}^T p_i
前景像素的总概率:
w1(T) = ∑_{i=T+1}^{L1} p_i = 1 w0(T)
(2)均值
背景区域的平均灰度值:
μ0(T) = (1 / w0(T)) ∑_{i=0}^T i p_i, 当w0(T) > 0
前景区域的平均灰度值:
μ1(T) = (1 / w1(T)) ∑_{i=T+1}^{L1} i p_i, 当w1(T) > 0
全局平均灰度值:
μ_T = ∑_{i=0}^{L1} i p_i = w0(T) μ0(T) + w1(T) μ1(T)
(3)方差
背景区域的方差:
σ0^2(T) = (1 / w0(T)) ∑_{i=0}^T (i μ0(T))^2 p_i, 当w0(T) > 0
前景区域的方差:
σ1^2(T) = (1 / w1(T)) ∑_{i=T+1}^{L1} (i μ1(T))^2 p_i, 当w1(T) > 0
(4)类间方差
Otsu's算法使用的类间方差定义为:
σ_b^2(T) = w0(T) (μ0(T) μ_T)^2 + w1(T) (μ1(T) μ_T)^2
可以简化为:
σ_b^2(T) = w0(T) w1(T) (μ0(T) μ1(T))^2
4. 最优阈值的确定
Otsu's算法通过遍历所有可能的阈值T(0到L1),找到使类间方差σ_b^2(T)最大的阈值作为最优阈值:
T_opt = argmax_{T=0}^{L1} σ_b^2(T)
三、OpenCV中的Otsu's实现
在OpenCV中,Otsu's二值化算法可以通过cv2.threshold()函数实现,只需在type参数中添加cv2.THRESH_OTSU标志即可。
1. 基本用法
//python
python
import cv2
import numpy as np
from matplotlib import pyplot as plt
#读取灰度图像
img = cv2.imread('coins.jpg', 0)
#应用Otsu's阈值分割
ret, thresh = cv2.threshold(img, 0, 255, cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU)
#显示结果
plt.figure(figsize=(12, 6))
plt.subplot(121), plt.imshow(img, cmap='gray'), plt.title('Original Image')
plt.subplot(122), plt.imshow(thresh, cmap='gray'), plt.title(f'Otsu's Thresholding (T={ret})')
plt.tight_layout()
plt.show()2. 参数说明
//python
ret, dst = cv2.threshold(src, thresh, maxval, type)
参数说明:
src:输入图像(必须是灰度图像)
thresh:手动设定的阈值(当使用Otsu's算法时,该值会被忽略,通常设为0)
maxval:当像素值超过阈值(或小于阈值,根据type而定)时,赋予的新值
type:阈值类型,必须包含cv2.THRESH_OTSU标志,可以与其他阈值类型组合使用
cv2.THRESH_BINARY + cv2.THRESH_OTSU:二值化 + Otsu's
cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU:反向二值化 + Otsu's
cv2.THRESH_TRUNC + cv2.THRESH_OTSU:截断 + Otsu's(不常用)
cv2.THRESH_TOZERO + cv2.THRESH_OTSU:化零 + Otsu's(不常用)
返回值:
ret:Otsu's算法计算得到的最优阈值
dst:阈值分割后的图像
3. 与高斯模糊结合使用
当图像噪声较大时,Otsu's算法的性能会下降。此时,可以先对图像进行高斯模糊处理,再应用Otsu's阈值分割:
//python
python
import cv2
import numpy as np
from matplotlib import pyplot as plt
#读取灰度图像
img = cv2.imread('noisy_image.jpg', 0)
#直接应用Otsu's阈值分割
ret1, thresh1 = cv2.threshold(img, 0, 255, cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU)
#先高斯模糊,再应用Otsu's阈值分割
blurred = cv2.GaussianBlur(img, (5, 5), 0)
ret2, thresh2 = cv2.threshold(blurred, 0, 255, cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU)
#显示结果
plt.figure(figsize=(15, 10))
plt.subplot(221), plt.imshow(img, cmap='gray'), plt.title('Original Noisy Image')
plt.subplot(222), plt.imshow(thresh1, cmap='gray'), plt.title(f'Otsu's (T={ret1})')
plt.subplot(223), plt.imshow(blurred, cmap='gray'), plt.title('Gaussian Blurred')
plt.subplot(224), plt.imshow(thresh2, cmap='gray'), plt.title(f'Blur + Otsu's (T={ret2})')
plt.tight_layout()
plt.show()
#显示直方图
plt.figure(figsize=(15, 5))
plt.subplot(121)
plt.hist(img.ravel(), 256, [0, 256])
plt.axvline(x=ret1, color='r', linestyle='', label=f'Otsu's T: {ret1}')
plt.title('Histogram of Original Image')
plt.legend()
plt.subplot(122)
plt.hist(blurred.ravel(), 256, [0, 256])
plt.axvline(x=ret2, color='r', linestyle='', label=f'Otsu's T: {ret2}')
plt.title('Histogram of Blurred Image')
plt.legend()
plt.tight_layout()
plt.show()四、Otsu's算法的优化与扩展
1. 多阈值Otsu's算法
基本的Otsu's算法只适用于二值分割(前景/背景),但可以扩展到多阈值分割。多阈值Otsu's算法通过最大化类间方差,将图像分割为多个区域。
在OpenCV中,可以使用cv2.ximgproc.threshold模块中的cv2.ximgproc.thresholdOtsu函数实现多阈值分割:
//python
python
import cv2
import numpy as np
from matplotlib import pyplot as plt
#读取灰度图像
img = cv2.imread('multi_peak_image.jpg', 0)
#应用单阈值Otsu's算法
ret1, thresh1 = cv2.threshold(img, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)
#应用双阈值Otsu's算法
注意:需要OpenCV 3.4+版本,并且安装了扩展模块
可以通过pip install opencvcontribpython安装
thresh2 = cv2.ximgproc.thresholdOtsu(img, k=2) k=2表示双阈值
#显示结果
plt.figure(figsize=(15, 8))
plt.subplot(131), plt.imshow(img, cmap='gray'), plt.title('Original Image')
plt.subplot(132), plt.imshow(thresh1, cmap='gray'), plt.title(f'Single Threshold (T={ret1})')
plt.subplot(133), plt.imshow(thresh2, cmap='gray'), plt.title('Dual Threshold')
plt.tight_layout()
plt.show()2. 改进的Otsu's算法
针对Otsu's算法在处理直方图非双峰分布图像时的局限性,研究者提出了多种改进方法:
(1)基于局部信息的Otsu's算法
结合图像的局部信息(如邻域像素的灰度值),提高Otsu's算法对非均匀光照图像的适应性。
(2)基于遗传算法的Otsu's优化
使用遗传算法搜索最优阈值,提高算法在处理复杂图像时的性能。
(3)快速Otsu's算法
通过减少计算量,提高Otsu's算法的执行速度,适用于实时图像处理场景。
3. 手动实现Otsu's算法
为了更好地理解Otsu's算法的工作原理,我们可以手动实现该算法:
//python
python
import cv2
import numpy as np
from matplotlib import pyplot as plt
def otsu_threshold(image):
计算图像直方图
hist, bins = np.histogram(image.ravel(), 256, [0, 256])
计算归一化直方图
total_pixels = image.shape[0] image.shape[1]
prob = hist / total_pixels
初始化最大类间方差和最优阈值
max_variance = 0
optimal_threshold = 0
遍历所有可能的阈值(0到255)
for t in range(256):
计算背景和前景的概率
w0 = np.sum(prob[:t+1])
w1 = 1 w0
if w0 == 0 or w1 == 0:
continue
计算背景和前景的平均灰度值
mu0 = np.sum(np.arange(t+1) prob[:t+1]) / w0
mu1 = np.sum(np.arange(t+1, 256) prob[t+1:]) / w1
计算类间方差
variance = w0 w1 (mu0 mu1) 2
更新最大类间方差和最优阈值
if variance > max_variance:
max_variance = variance
optimal_threshold = t
return optimal_threshold
#读取灰度图像
img = cv2.imread('coins.jpg', 0)
#使用自定义Otsu's算法
custom_thresh = otsu_threshold(img)
print(f'Custom Otsu\'s threshold: {custom_thresh}')
#使用OpenCV内置Otsu's算法
ret, thresh_opencv = cv2.threshold(img, 0, 255, cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU)
print(f'OpenCV Otsu\'s threshold: {ret}')
#应用自定义阈值
ret_custom, thresh_custom = cv2.threshold(img, custom_thresh, 255, cv2.THRESH_BINARY_INV)
#显示结果
plt.figure(figsize=(15, 6))
plt.subplot(131), plt.imshow(img, cmap='gray'), plt.title('Original Image')
plt.subplot(132), plt.imshow(thresh_custom, cmap='gray'), plt.title(f'Custom Otsu\'s (T={custom_thresh})')
plt.subplot(133), plt.imshow(thresh_opencv, cmap='gray'), plt.title(f'OpenCV Otsu\'s (T={ret})')
plt.tight_layout()
plt.show()五、Otsu's算法与其他阈值方法的对比
1. 与全局阈值的对比
//python
python
import cv2
import numpy as np
from matplotlib import pyplot as plt
#读取灰度图像
img = cv2.imread('coins.jpg', 0)
#全局阈值(手动设置)
ret1, thresh1 = cv2.threshold(img, 130, 255, cv2.THRESH_BINARY_INV)
#Otsu's阈值
ret2, thresh2 = cv2.threshold(img, 0, 255, cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU)
#显示结果
plt.figure(figsize=(15, 6))
plt.subplot(131), plt.imshow(img, cmap='gray'), plt.title('Original Image')
plt.subplot(132), plt.imshow(thresh1, cmap='gray'), plt.title(f'Global Threshold (T=130)')
plt.subplot(133), plt.imshow(thresh2, cmap='gray'), plt.title(f'Otsu\'s Threshold (T={ret2})')
plt.tight_layout()
plt.show()2. 与自适应阈值的对比
//python
python
import cv2
import numpy as np
from matplotlib import pyplot as plt
#读取灰度图像
img = cv2.imread('uneven_lighting.jpg', 0)
#Otsu's阈值
ret1, thresh1 = cv2.threshold(img, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)
#自适应阈值(均值法)
thresh2 = cv2.adaptiveThreshold(img, 255, cv2.ADAPTIVE_THRESH_MEAN_C,
cv2.THRESH_BINARY, 11, 2)
#自适应阈值(高斯法)
thresh3 = cv2.adaptiveThreshold(img, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C,
cv2.THRESH_BINARY, 11, 2)
#显示结果
plt.figure(figsize=(15, 10))
plt.subplot(221), plt.imshow(img, cmap='gray'), plt.title('Original Image')
plt.subplot(222), plt.imshow(thresh1, cmap='gray'), plt.title(f'Otsu\'s Threshold (T={ret1})')
plt.subplot(223), plt.imshow(thresh2, cmap='gray'), plt.title('Adaptive Mean Threshold')
plt.subplot(224), plt.imshow(thresh3, cmap='gray'), plt.title('Adaptive Gaussian Threshold')
plt.tight_layout()
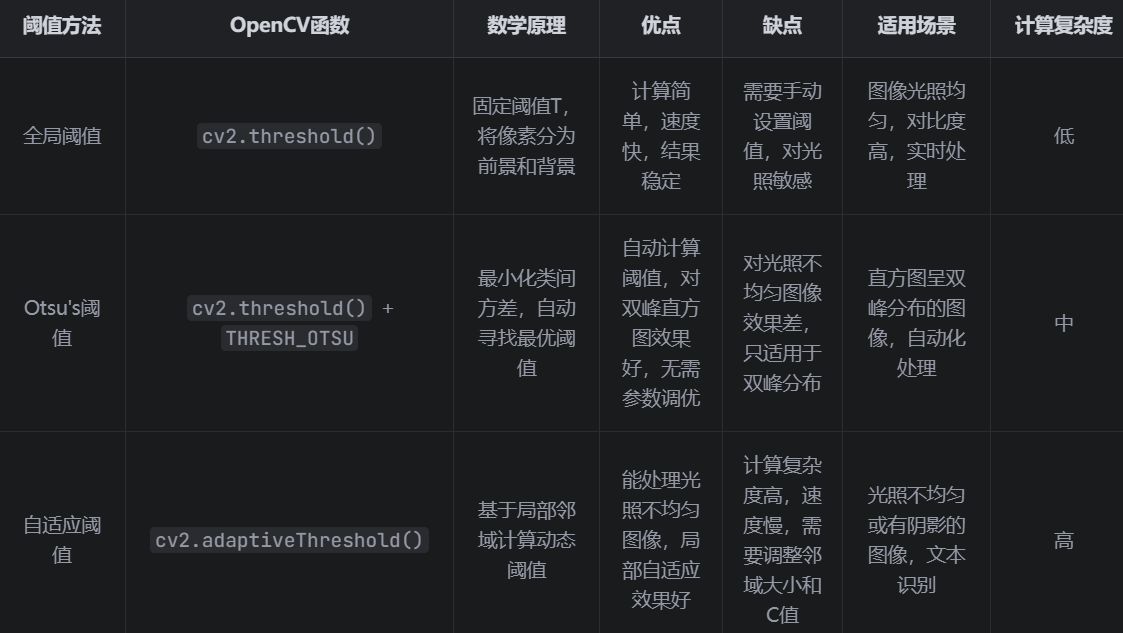
plt.show()3. 性能对比
六、实际应用案例
1. 硬币检测
//python
python
import cv2
import numpy as np
from matplotlib import pyplot as plt
#读取图像
img = cv2.imread('coins.jpg')
#转换为灰度图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#高斯模糊
blurred = cv2.GaussianBlur(gray, (11, 11), 0)
#Otsu's阈值分割
ret, thresh = cv2.threshold(blurred, 0, 255, cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU)
#形态学操作,去除噪声
kernel = np.ones((3, 3), np.uint8)
opening = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, kernel, iterations=2)
#检测轮廓
contours, hierarchy = cv2.findContours(opening.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
#绘制轮廓
img_contours = img.copy()
cv2.drawContours(img_contours, contours, 1, (0, 255, 0), 2)
#显示结果
plt.figure(figsize=(15, 10))
plt.subplot(231), plt.imshow(cv2.cvtColor(img, cv2.COLOR_BGR2RGB)), plt.title('Original Image')
plt.subplot(232), plt.imshow(gray, cmap='gray'), plt.title('Grayscale')
plt.subplot(233), plt.imshow(blurred, cmap='gray'), plt.title('Gaussian Blur')
plt.subplot(234), plt.imshow(thresh, cmap='gray'), plt.title(f'Otsu\'s Threshold (T={ret})')
plt.subplot(235), plt.imshow(opening, cmap='gray'), plt.title('Morphological Opening')
plt.subplot(236), plt.imshow(cv2.cvtColor(img_contours, cv2.COLOR_BGR2RGB)), plt.title(f'Coins Detected: {len(contours)}')
plt.tight_layout()
plt.show()2. 文档二值化
//python
python
import cv2
import numpy as np
from matplotlib import pyplot as plt
#读取文档图像
img = cv2.imread('document.jpg')
#转换为灰度图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#高斯模糊
blurred = cv2.GaussianBlur(gray, (5, 5), 0)
#Otsu's阈值分割
ret, thresh_otsu = cv2.threshold(blurred, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)
#自适应阈值分割
thresh_adaptive = cv2.adaptiveThreshold(blurred, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C,
cv2.THRESH_BINARY, 11, 2)
#显示结果
plt.figure(figsize=(15, 8))
plt.subplot(221), plt.imshow(cv2.cvtColor(img, cv2.COLOR_BGR2RGB)), plt.title('Original Document')
plt.subplot(222), plt.imshow(gray, cmap='gray'), plt.title('Grayscale')
plt.subplot(223), plt.imshow(thresh_otsu, cmap='gray'), plt.title(f'Otsu\'s Threshold (T={ret})')
plt.subplot(224), plt.imshow(thresh_adaptive, cmap='gray'), plt.title('Adaptive Threshold')
plt.tight_layout()
plt.show()3. 细胞计数
//python
python
import cv2
import numpy as np
from matplotlib import pyplot as plt
#读取细胞图像
img = cv2.imread('cells.jpg')
#转换为灰度图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#高斯模糊
blurred = cv2.GaussianBlur(gray, (7, 7), 0)
#Otsu's阈值分割
ret, thresh = cv2.threshold(blurred, 0, 255, cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU)
#形态学操作
kernel = np.ones((5, 5), np.uint8)
closing = cv2.morphologyEx(thresh, cv2.MORPH_CLOSE, kernel, iterations=2)
opening = cv2.morphologyEx(closing, cv2.MORPH_OPEN, kernel, iterations=1)
#检测轮廓
contours, hierarchy = cv2.findContours(opening.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
#过滤掉小轮廓(噪声)
filtered_contours = []
for contour in contours:
if cv2.contourArea(contour) > 100: #调整阈值以过滤不同大小的噪声
filtered_contours.append(contour)
#绘制轮廓
img_contours = img.copy()
cv2.drawContours(img_contours, filtered_contours, 1, (0, 255, 0), 2)
#在轮廓上标注数字
for i, contour in enumerate(filtered_contours):
计算轮廓的中心坐标
M = cv2.moments(contour)
if M["m00"] != 0:
cx = int(M["m10"] / M["m00"])
cy = int(M["m01"] / M["m00"])
#绘制数字
cv2.putText(img_contours, str(i+1), (cx10, cy+10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 0, 255), 2)
#显示结果
plt.figure(figsize=(15, 10))
plt.subplot(231), plt.imshow(cv2.cvtColor(img, cv2.COLOR_BGR2RGB)), plt.title('Original Image')
plt.subplot(232), plt.imshow(gray, cmap='gray'), plt.title('Grayscale')
plt.subplot(233), plt.imshow(blurred, cmap='gray'), plt.title('Gaussian Blur')
plt.subplot(234), plt.imshow(thresh, cmap='gray'), plt.title(f'Otsu\'s Threshold (T={ret})')
plt.subplot(235), plt.imshow(opening, cmap='gray'), plt.title('Morphological Operations')
plt.subplot(236), plt.imshow(cv2.cvtColor(img_contours, cv2.COLOR_BGR2RGB)), plt.title(f'Cells Counted: {len(filtered_contours)}')
plt.tight_layout()
plt.show()
print(f"检测到的细胞数量: {len(filtered_contours)}")七、注意事项与技巧
1. 图像预处理
- 灰度转换:Otsu's算法只适用于灰度图像,需要先将彩色图像转换为灰度图像
- 噪声处理:使用高斯模糊(cv2.GaussianBlur())减少图像噪声,提高Otsu's算法的性能
- 对比度增强:使用直方图均衡化(cv2.equalizeHist())增强图像对比度,使直方图更容易呈现双峰分布
//python
图像预处理示例
python
import cv2
import numpy as np
from matplotlib import pyplot as plt
#读取彩色图像
img = cv2.imread('low_contrast.jpg')
#转换为灰度图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#对比度增强
equalized = cv2.equalizeHist(gray)
#高斯模糊
blurred = cv2.GaussianBlur(equalized, (5, 5), 0)
#Otsu's阈值分割
ret, thresh = cv2.threshold(blurred, 0, 255, cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU)
#显示结果
plt.figure(figsize=(15, 10))
plt.subplot(231), plt.imshow(cv2.cvtColor(img, cv2.COLOR_BGR2RGB)), plt.title('Original Image')
plt.subplot(232), plt.imshow(gray, cmap='gray'), plt.title('Grayscale')
plt.subplot(233), plt.imshow(equalized, cmap='gray'), plt.title('Histogram Equalization')
plt.subplot(234), plt.imshow(blurred, cmap='gray'), plt.title('Gaussian Blur')
plt.subplot(235), plt.imshow(thresh, cmap='gray'), plt.title(f'Otsu\'s Threshold (T={ret})')
#显示直方图
plt.subplot(236)
plt.hist(blurred.ravel(), 256, [0, 256])
plt.axvline(x=ret, color='r', linestyle='', label=f'Otsu\'s T: {ret}')
plt.title('Histogram')
plt.legend()
plt.tight_layout()
plt.show()2. 直方图分析
直方图形状:Otsu's算法对双峰直方图效果最好,如果直方图不是双峰的,可以尝试使用图像预处理技术使其呈现双峰分布
阈值位置:观察直方图中Otsu's阈值的位置,确保它位于两个峰值之间
3. 阈值类型选择
目标为白色,背景为黑色:使用cv2.THRESH_BINARY + cv2.THRESH_OTSU
目标为黑色,背景为白色:使用cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU
4. 处理复杂图像
多阈值分割:对于复杂图像,可以使用多阈值Otsu's算法
局部Otsu's:对于光照不均匀的图像,可以将图像分成多个小块,对每个小块应用Otsu's算法
//python
局部Otsu's示例
python
import cv2
import numpy as np
from matplotlib import pyplot as plt
def local_otsu(image, block_size):
#局部Otsu's阈值分割
height, width = image.shape
result = np.zeros_like(image)
#扩展图像边界,避免边缘处理问题
pad = block_size // 2
padded = cv2.copyMakeBorder(image, pad, pad, pad, pad, cv2.BORDER_REFLECT)
#对每个像素应用局部Otsu's
for i in range(height):
for j in range(width):
#提取局部区域
block = padded[i:i+block_size, j:j+block_size]
#计算局部Otsu's阈值
ret, _ = cv2.threshold(block, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)
#应用阈值
result[i, j] = 255 if image[i, j] > ret else 0
return result
#读取灰度图像
img = cv2.imread('uneven_lighting.jpg', 0)
#全局Otsu's
ret, thresh_global = cv2.threshold(img, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)
#局部Otsu's
thresh_local = local_otsu(img, block_size=15)
#显示结果
plt.figure(figsize=(15, 8))
plt.subplot(131), plt.imshow(img, cmap='gray'), plt.title('Original Image')
plt.subplot(132), plt.imshow(thresh_global, cmap='gray'), plt.title(f'Global Otsu\'s (T={ret})')
plt.subplot(133), plt.imshow(thresh_local, cmap='gray'), plt.title('Local Otsu\'s (Block Size=15)')
plt.tight_layout()
plt.show()八、总结
Otsu's二值化算法是一种经典的自动阈值选择方法,通过最大化类间方差来确定最优阈值。它具有自动化、高效性和适应性等优点,广泛应用于图像处理的各个领域。
主要内容回顾
Otsu's算法原理:基于类间方差最大化,自动选择最优阈值
数学推导:详细介绍了Otsu's算法的数学原理和推导过程
OpenCV实现:使用cv2.threshold()函数,添加cv2.THRESH_OTSU标志启用
优化与扩展:多阈值Otsu's算法、自定义实现和局部Otsu's算法
对比分析:与全局阈值和自适应阈值的对比
实际应用:硬币检测、文档二值化和细胞计数
注意事项:图像预处理、直方图分析和阈值类型选择
使用建议
- 当图像直方图呈双峰分布时,优先选择Otsu's算法
- 对噪声较大的图像,先进行高斯模糊处理
- 对光照不均匀的图像,可以尝试局部Otsu's算法或自适应阈值
- 对于复杂图像,可以结合形态学操作进一步优化分割结果
Otsu's二值化算法是图像处理中的基础技术,掌握它对于理解和应用更复杂的图像处理算法至关重要。通过合理使用Otsu's算法,可以在各种应用场景中获得良好的图像分割效果。