1. CAN简介
使用Socket CAN的主要目的就是为用户空间的应用程序提供基于Linux网络层的套接字接口。与广为人知的TCP/IP协议以及以太网不同,CAN总线没有类似以太网的MAC层地址,只能用于广播。CAN ID仅仅用来进行总线的仲裁。因此CAN ID在总线上必须是唯一的。当设计一个CAN-ECU(Electronic Control Unit 电子控制单元)网络的时候,CAN报文ID可以映射到具体的ECU。因此CAN报文ID可以当作发送源的地址来使用。
1.1 开发板的CAN资源
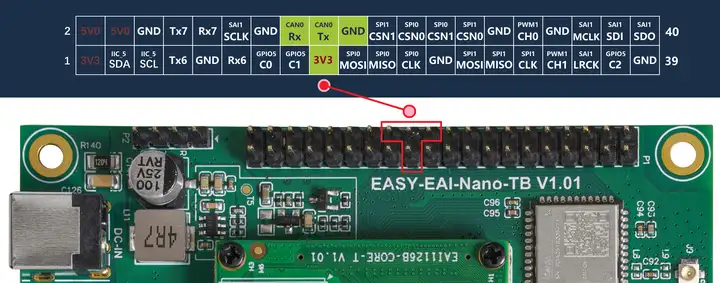
1.2 硬件连接
通常由CPU出来的CAN信号是TTL信号,并不是差分信号。因此需要一个CAN TTL信号转CAN差分信号的模块。其具体的接线图如下所示。

2. 快速上手
2.1 开发环境准备
如果您初次阅读此文档,请阅读《入门指南/开发环境准备/Easy-Eai编译环境准备与更新》,并按照其相关的操作,进行编译环境的部署。
在PC端Ubuntu系统中执行run脚本,进入EASY-EAI编译环境,具体如下所示。
cd ~/develop_environment
./run.sh
2.2 源码下载以及例程编译
首先,在虚拟机后台终端,执行以下命令,创建外设单例源码管理目录:
cd /opt
mkdir -p EASY-EAI-Nano-TB/demo首先,到【百度网盘】上下载相关的单例程序:
链接:https://pan.baidu.com/s/1Br608Hiff2Xs65PzWO_qWQ?pwd=1234
提取码:1234
比如把单例程序下载到:此电脑\D:\BaiduNetdisk (无规定,用户可自主选择),如下图所示。

再将下载好的单例复制进入虚拟机的文件系统,过程如下图所示。



最后,进入到对应的例程目录执行编译操作,具体命令如下所示:
cd EASY-EAI-Nano-TB/demo/11_CAN
./build.sh注:
* 由于依赖库部署在板卡上,因此交叉编译过程中必须保持/mnt挂载。
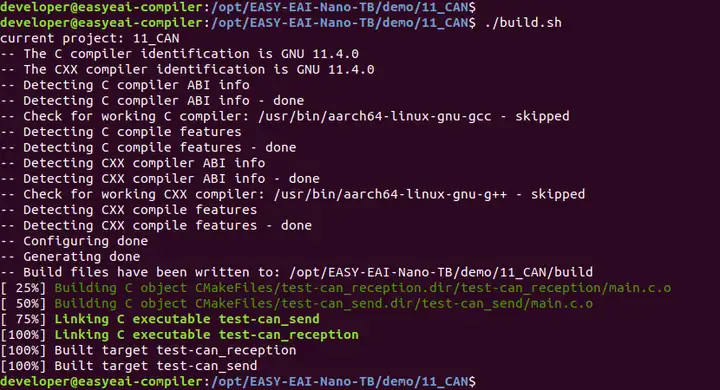
编译成功后,会生成2个demo,一个是发送端:test-can_send,另一个是接收端:test-can_reception。并会自动部署到开发板的/userdata/目录中。
* 此例程需要2个板卡做收发测试,所以2个板卡都需要重复上述操作。
2.3 例程运行
通过串口调试或ssh调试,进入板卡后台,定位到例程部署的位置,如下所示:
cd /userdata
首先在一台板卡上运行发送端,运行命令如下:
sudo ./test-can-send然后【再在另外一台】板卡上,运行接收端,运行命令如下:
cd /userdata
sudo ./test-can-reception【接收端】执行效果如下所示。

API的详细说明,以及API的调用(本例程源码),详细信息见下方说明。
3. CAN操作API说明
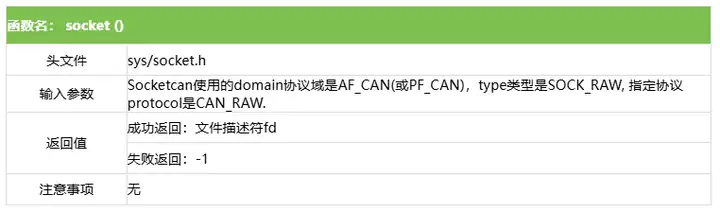
3.1 创建socketcan套接字操作
创建socketcan套接字操作函数原型如下所示。
int socket(int domain, int type, int protocol);具体介绍如下所示。
3.2 指定本地网络接口地址操作
指定本地网络接口地址函数原型如下所示。
int ioctl(int fd, unsigned long request, ...);具体介绍如下所示。


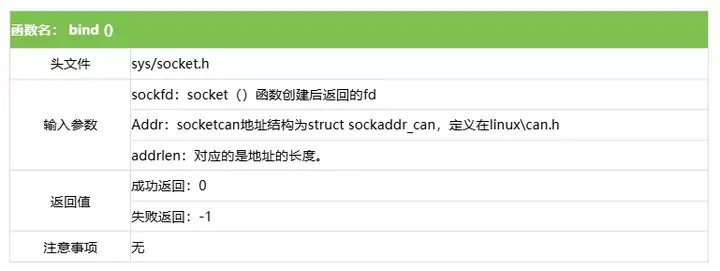
3.3 绑定地址结构操作
绑定地址结构函数原型如下所示。
int bind(int sockfd, const struct sockaddr *addr,socklen_t addrlen);具体介绍如下所示。
3.4 设置CAN过滤器操作
设置CAN过滤器操作函数原型如下所示。
int setsockopt(int sockfd, int level, int optname, const void *optval, socklen_t optlen); 

3.5 CAN定义报文格式操作
CAN定义报文格式如下所示。

4. CAN通信例程
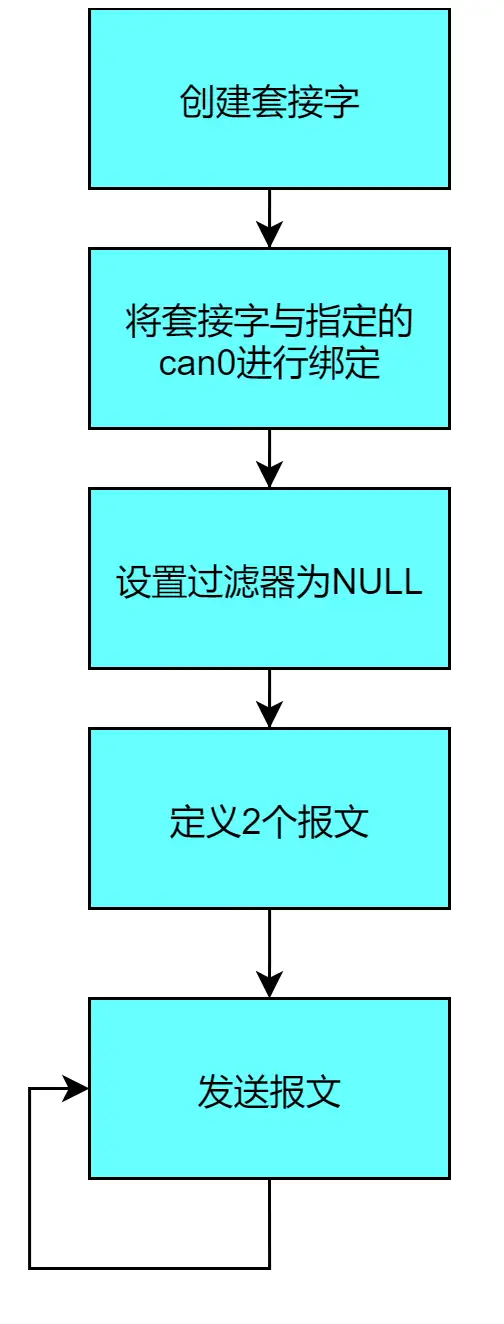
【发送端】例程源码为11_CAN/test-can_send/main.c,操作流程如下。
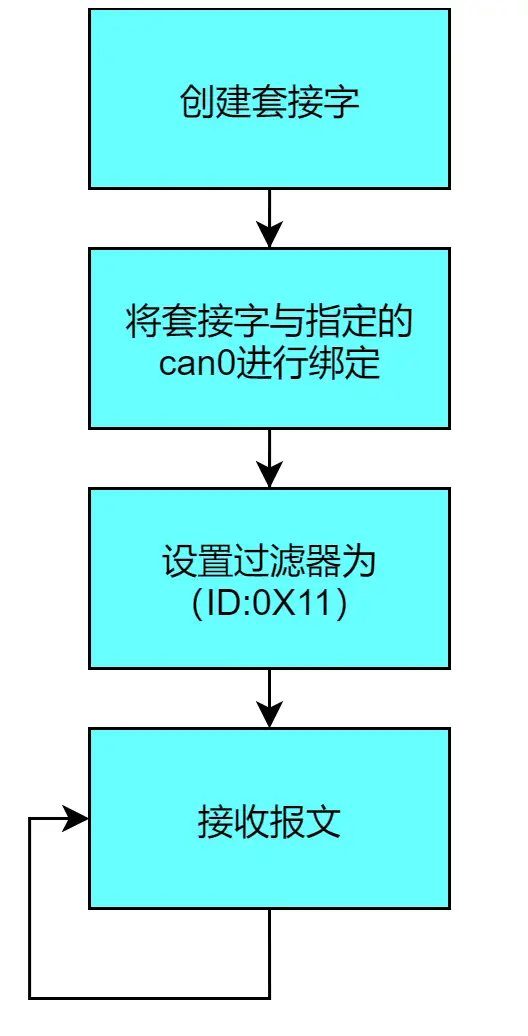
【接收端】例程源码为11_CAN/test-can_send/main.c,操作流程如下。
参考例程如下所示。
发送端例程:
/* 将CAN0波特率设置为500000 bps */
#define ip_cmd_set_can_params "ip link set can0 type can bitrate 500000 triple-sampling on"
/* 打开CAN0 */
#define ip_cmd_open "ifconfig can0 up"
/* 关闭CAN0 */
#define ip_cmd_close "ifconfig can0 down"
int main()
{
int fd, nbytes;
struct sockaddr_can addr;
struct ifreq ifr;
struct can_frame frame[2] = {{0}};
system(ip_cmd_close);
system(ip_cmd_set_can_params);
system(ip_cmd_open);
fd = socket(PF_CAN, SOCK_RAW, CAN_RAW);//创建套接字
strcpy(ifr.ifr_name, "can0" );
ioctl(fd, SIOCGIFINDEX, &ifr); //指定 can0 设备
addr.can_family = AF_CAN;
addr.can_ifindex = ifr.ifr_ifindex;
bind(fd, (struct sockaddr *)&addr, sizeof(addr));//将套接字与 can0 绑定
//禁用过滤规则,本进程不接收报文,只负责发送
setsockopt(fd, SOL_CAN_RAW, CAN_RAW_FILTER, NULL, 0);
//生成两个报文
frame[0].can_id = 0x11;
frame[0]. can_dlc = 1;
frame[0].data[0] = 'Y';
frame[1].can_id = 0x22;
frame[1]. can_dlc = 1;
frame[1].data[0] = 'N';
//循环发送两个报文
while(1)
{
nbytes = write(fd, &frame[0], sizeof(frame[0])); //发送 frame[0]
printf("write ret:%d",nbytes);
if(nbytes != sizeof(frame[0])) {
printf("Send Error frame[0]\n!");
break; //发送错误,退出
}
sleep(1);
nbytes = write(fd, &frame[1], sizeof(frame[1])); //发送 frame[1]
if(nbytes != sizeof(frame[1])) {
printf("Send Error frame[1]\n!");
break;
}
sleep(1);
}
close(fd);
return 0;
}接收端例程:
/* 将CAN0波特率设置为500000 bps */
#define ip_cmd_set_can_params "ip link set can0 type can bitrate 500000 triple-sampling on"
/* 打开CAN0 */
#define ip_cmd_open "ifconfig can0 up"
/* 关闭CAN0 */
#define ip_cmd_close "ifconfig can0 down"
int main()
{
int fd, nbytes;
struct sockaddr_can addr;
struct ifreq ifr;
struct can_frame frame;
struct can_filter rfilter[1];
system(ip_cmd_close);
system(ip_cmd_set_can_params);
system(ip_cmd_open);
fd = socket(PF_CAN, SOCK_RAW, CAN_RAW); //创建套接字
strcpy(ifr.ifr_name, "can0" );
ioctl(fd, SIOCGIFINDEX, &ifr); //指定 can0 设备
addr.can_family = AF_CAN;
addr.can_ifindex = ifr.ifr_ifindex;
bind(fd, (struct sockaddr *)&addr, sizeof(addr)); //将套接字与 can0 绑定
//定义接收规则,只接收表示符等于 0x11 的报文
rfilter[0].can_id = 0x11;
rfilter[0].can_mask = CAN_SFF_MASK;
//设置过滤规则
setsockopt(fd, SOL_CAN_RAW, CAN_RAW_FILTER, &rfilter, sizeof(rfilter));
while(1)
{
nbytes = read(fd, &frame, sizeof(frame)); //接收报文
//显示报文
if(nbytes > 0) {
printf("ID=0x%X DLC=%d data[0]=0x%X\n", frame.can_id, frame.can_dlc, frame.data[0]);
}
}
close(fd);
return 0;
}