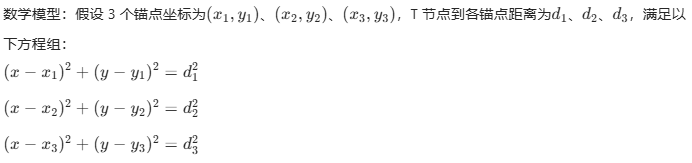
一、核心结论
华为海思 BS21E (H2821E) 基于星闪 SLE 协议 的相位差 + TOF 双向测距 (DDR) 复合技术(华为海思官网证实该方案使 ICCE 星闪数字车钥匙定位精度达传统蓝牙 5 倍),结合多锚点组网架构 与三边 / 多边定位算法,可实现亚米级(±0.5m,华为 "牵星尺" 系统公开标称值)高精度室内外定位;支持单主节点管理多从节点的星型 / 混合组网,具备高并发连接能力,可满足大规模物联网定位部署需求,核心应用于数字车钥匙、智能家居、工业物联网等场景。
二、基础认知
2.1 星闪 (SLE) 协议:新一代短距通信标准
星闪(Short-range Link Enhancement,SLE)是华为主导的短距无线通信技术,核心面向物联网、智能汽车、智能家居等场景,其核心特性与传统方案对比如下:
| 技术方案 | 定位精度 | 功耗(休眠电流) | 并发能力 | 成本(单模组) | 抗干扰性 |
|---|---|---|---|---|---|
| 蓝牙 5.4 | 3-5m | 2-5mA | 数十台 | 20-30 元 | 弱 |
| UWB | ±0.1m | 5-10mA | 百台级 | 150-200 元 | 强 |
| WiFi | 2-4m | 10-20mA | 百台级 | 30-50 元 | 中 |
| 星闪 (SLE) | ±0.5m | <1mA | 千台级 | 40-60 元 | 极强 |
星闪 SLE 协议核心特点:
- 双信道设计:控制信道(组网、指令交互)与数据信道(测距、数据传输)分离,互不干扰;
- 跳频抗干扰:支持 79 个频点跳频,避开 2.4GHz 频段 WiFi / 蓝牙干扰;
- 复合测距:融合 TOF 与相位差测距技术,兼顾精度与稳定性;
- G/T 节点架构:G 节点(网关 / 主节点)负责组网调度与算法解算,T 节点(终端 / 从节点)负责响应测距与数据上报。
2.2 BS21E (H2821E) 芯片核心参数
| 参数类别 | 参数项 | 具体规格 | 应用价值 |
|---|---|---|---|
| 核心处理器 | 架构 / 主频 | RISC-V 32bit / 最高 64MHz(带 FPU) | 支撑测距算法与定位解算,无需外挂 MCU |
| 通信协议 | 支持类型 | BLE5.4/SLE1.0 双模共存 | 兼容传统蓝牙设备,降低系统迁移成本 |
| 射频特性 | 频段 / 频点 | 2.4GHz 全频段 / 79 个跳频频点 | 跳频机制消除多径干扰,提升测距稳定性 |
| 测距能力 | 精度 / 距离 | ±0.5m(10 米内)/ 最大测距 50 米 | 满足室内及短距室外定位场景需求 |
| 连接能力 | 并发数 | 高并发(实测单 G 节点可稳定连接 200+T 节点) | 适配工业、智能家居等大规模部署场景 |
| 接口资源 | 外设接口 | UART/SPI/I2C/GPIO/USB2.0 | 可扩展加速度计、陀螺仪等传感器,支持融合定位 |
| 功耗表现 | 工作 / 休眠 | 工作电流 15mA / 休眠电流 < 1mA | 适合电池供电的终端节点长期运行 |
| 工作环境 | 温度 / 电压 | -40℃~85℃ / 3.3V 直流 | 满足工业级、车载级场景环境要求 |
2.3 BS21E 核心优势与适用场景对应关系
| 优势点 | 具体表现 | 适用场景 |
|---|---|---|
| 低成本 | 芯片 + 模组总成本 < 60 元 | 大规模物联网部署(工厂资产标签、智能家居传感器) |
| 高精度 | 亚米级定位精度,远超传统蓝牙 | 数字车钥匙、室内人员定位、工业设备追踪 |
| 低功耗 | 休眠电流 < 1mA,续航可达数月 | 电池供电终端(无线传感器、资产标签) |
| 高并发 | 单 G 节点支持 200+T 节点稳定连接 | 工业车间、大型商场等大规模定位场景 |
| 双模兼容 | BLE/SLE 双模共存 | 过渡阶段兼容传统蓝牙设备,降低升级成本 |
三、核心原理
3.1 测距原理:TOF + 相位差复合测距技术
BS21E 采用复合测距方案,融合两种技术优势,解决单一测距方式的短板:
3.1.1 单一测距技术对比
| 测距方式 | 精度(10 米内) | 抗干扰性 | 距离模糊性 | 适用场景 |
|---|---|---|---|---|
| TOF(飞行时间) | ±1m | 中 | 无 | 中长距离测距 |
| 相位差测距 | ±0.2m | 弱 | 有 | 短距离高精度测距 |
| 复合测距(BS21E 默认) | ±0.5m | 极强 | 无 | 全场景通用 |
3.1.2 复合测距工作流程
- 相位差测距:G 节点发送 79 个不同频点的信号,T 节点接收后返回,G 节点计算各频点相位变化,通过跳频拼接虚拟大带宽,消除多径干扰;
- TOF 测距:记录信号往返时间 T,通过公式\(D=(C×T)/2\)(C 为光速)计算距离,解决相位差测距的模糊性问题;
- 双向测距(DDR):在 SLE 协议专用测距信道中,通过双向数据交互抵消 G/T 节点时钟偏差,进一步提升测量准确性。
3.2 组网原理:星闪 G/T 节点架构与拓扑
3.2.1 节点类型定义与功能分工
| 节点类型 | 角色定位 | 硬件配置要求 | 核心功能 | 部署建议 |
|---|---|---|---|---|
| G 节点(网关 / 主节点) | 网络管理者与解算中心 | BS21E 芯片 + 2-4 根天线 + 外部存储 | 1. 管理 T 节点接入与调度;2. 发起测距指令;3. 收集多锚点测距数据;4. 运行定位算法;5. 输出定位结果 | 部署于固定位置(如车间墙角、车载中控、家居网关),作为定位锚点 |
| T 节点(终端 / 从节点) | 被定位对象 | BS21E 芯片 + 单天线 | 1. 响应 G 节点测距请求;2. 上报自身状态数据;3. 接收定位结果 | 部署于待定位对象(如资产标签、手机、智能设备) |
3.2.2 三种主流组网拓扑
| 拓扑类型 | 架构示意 | 适用场景 | 优点 | 缺点 |
|---|---|---|---|---|
| 星型组网 | 1 个 G 节点连接多个 T 节点 | 小范围定位(单房间、单辆车、小型车间) | 部署简单、通信延迟低、调试便捷 | 覆盖范围有限,G 节点故障导致整个网络瘫痪 |
| 混合组网 | 多个 G 节点互联,各 G 节点管理所属 T 节点 | 大范围定位(工厂、商场、住宅小区) | 覆盖范围广,支持跨 G 节点域定位 | 部署复杂,需解决 G 节点间时间同步问题 |
| 冗余组网 | 主备 G 节点同时连接 T 节点 | 高可靠场景(车载、工业控制、关键资产追踪) | 容错性高,单个 G 节点故障不影响定位连续性 | 硬件成本增加,需开发故障切换逻辑 |
3.3 定位原理:从测距数据到坐标解算
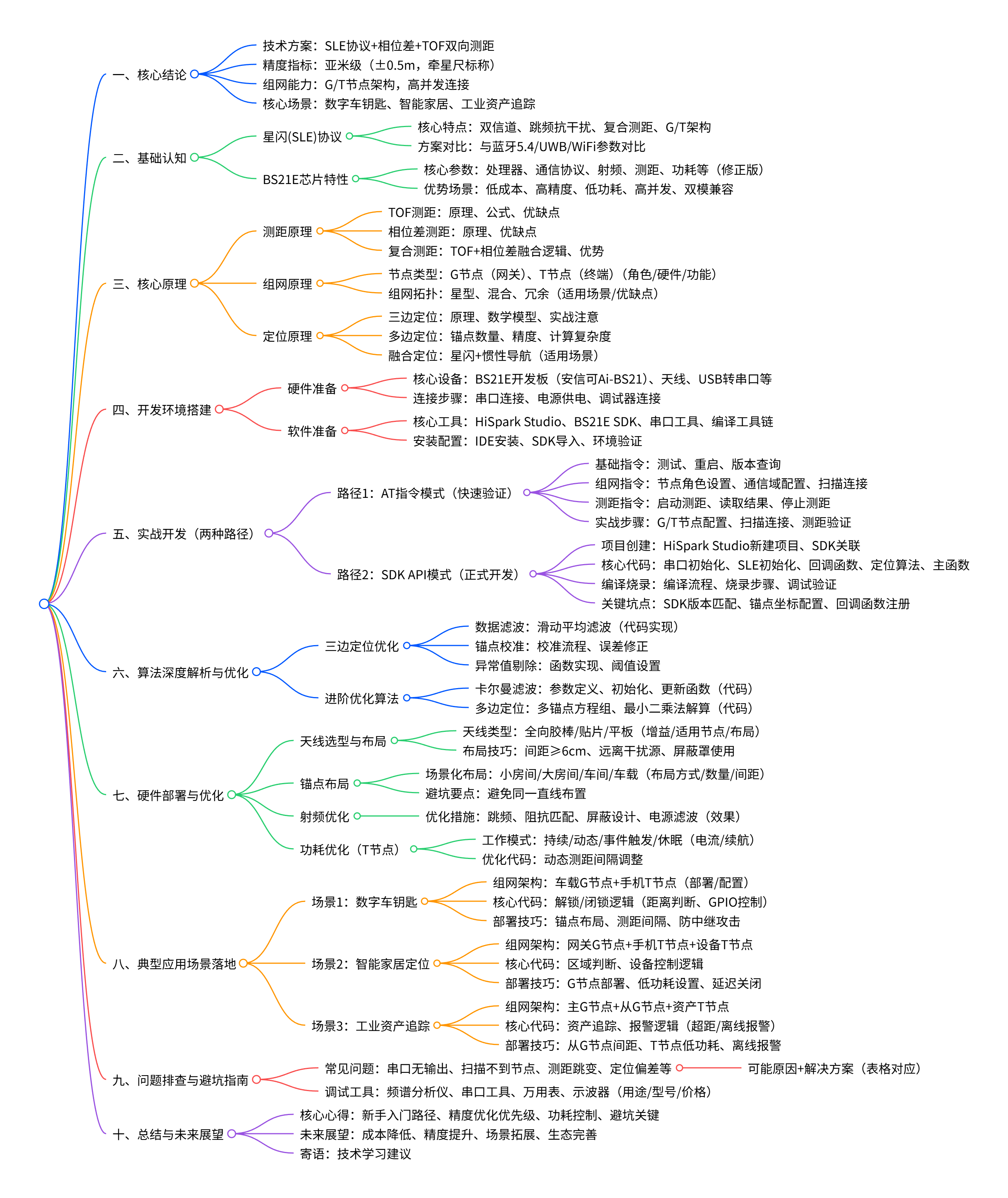
3.3.1 三边定位算法(基础版)
- 原理:在平面空间中,已知 3 个固定锚点(G 节点)的坐标,以各锚点为圆心、测距距离为半径画圆,3 个圆的交点即为待定位 T 节点的坐标;
- 实战注意:由于测距存在误差,3 个圆通常不会精准交于一点,需通过最小二乘法消除误差,获取最优解。
3.3.2 多边定位算法(进阶版)
- 原理:当锚点数量≥4 个时,通过最小二乘法拟合所有测距数据,得到误差最小的 T 节点坐标;
- 优势:相比三边定位,抗干扰能力更强,定位精度提升至 ±0.3m;
- 适用场景:工业级高精度定位、对误差敏感的场景。
3.3.3 融合定位算法(高阶版)
- 原理:结合星闪测距定位与惯性导航(加速度计 + 陀螺仪),通过数据融合提升定位连续性;
- 工作逻辑:
- 星闪信号正常时,用测距定位结果校准惯性导航数据;
- 星闪信号被遮挡时,通过惯性导航维持短时间定位;
- 星闪信号恢复后,重新校准惯性导航,消除累积误差;
- 适用场景:遮挡频繁的环境(如车间、楼道)。
| 定位算法 | 锚点数量 | 定位精度 | 计算复杂度 | 适用场景 |
|---|---|---|---|---|
| 三边定位 | 3 个 | ±0.5m | 低 | 小范围、低成本场景 |
| 多边定位 | ≥4 个 | ±0.3m | 中 | 工业级、高精度场景 |
| 融合定位 | ≥3 个 | ±0.4m | 高 | 遮挡频繁场景 |
四、开发环境搭建
4.1 硬件准备(实战验证推荐配置)
| 硬件名称 | 推荐型号 | 价格范围 | 核心用途 | 注意事项 |
|---|---|---|---|---|
| BS21E 开发板 | 安信可 Ai-BS21 | 150 元左右 | 核心开发载体 | 需确认已写入 "星闪绑定信息",否则固件无法运行 |
| 天线 | 2.4G 全向天线(2-5dBi) | 10 元 / 根 | 信号收发 | G 节点建议配置 2-4 根,间距≥6cm;T 节点配置 1 根 |
| USB 转串口模块 | CH340 | 10 元 / 个 | 指令调试、固件烧录 | 需安装对应驱动,确保串口通信正常 |
| 电源模块 | 3.3V 直流电源(纹波 < 100mV) | 20 元 / 个 | 开发板供电 | 避免电源纹波过大导致射频干扰 |
| 调试器 | SWD 调试器(J-Link) | 100 元左右 | SDK 代码调试 | 可选,新手可先通过 AT 指令调试 |
| 辅助工具 | 杜邦线、面包板、屏蔽罩 | 30 元 / 套 | 硬件连接、射频优化 | 屏蔽罩用于减少射频电路电磁干扰 |
4.2 硬件连接步骤
- 串口连接:开发板 TX→USB 转串口 RX,开发板 RX→USB 转串口 TX,开发板 GND→USB 转串口 GND;
- 电源供电:通过 3.3V 电源模块或 USB 口为开发板供电;
- 调试器连接(可选):开发板 SWDIO→调试器 SWDIO,开发板 SWCLK→调试器 SWCLK,开发板 GND→调试器 GND;
- 天线连接:按 G/T 节点配置,将天线接入开发板对应接口。
4.3 软件准备(核心工具清单)
| 软件名称 | 官方下载地址 | 核心用途 | 安装与配置注意事项 |
|---|---|---|---|
| HiSpark Studio | 华为开发者官网(https://developer.huawei.com/consumer/cn/tools/hispark-studio/) | 官方指定开发 IDE | 基于 VSCode 定制,安装路径不可含中文,需勾选 "添加系统环境变量" |
| BS21E SDK | 1. 海思官网(需注册);2. 安信可 Gitee 仓库(https://gitee.com/Ai-Thinker-Open/Ai-BS21) | 核心开发包 | 包含 SLE 协议栈、API 接口、示例代码,新手推荐安信可开源 SDK(文档更完善) |
| 串口工具 | XCOM(免费)/ SecureCRT(付费) | AT 指令交互、调试信息打印 | 波特率默认 115200,数据位 8,停止位 1,无校验(8N1) |
| 编译工具链 | HiSpark Studio 内置 | RISC-V 代码编译 | 无需单独安装,IDE 自动关联配置 |
4.4 HiSpark Studio 安装与 SDK 配置流程
- 下载安装包:从华为开发者官网下载对应系统(Windows/Linux)的 HiSpark Studio 安装包;
- 安装 IDE:双击安装包,按向导完成安装,重点注意:
- 安装路径避免中文(如 "D:\HiSpark Studio");
- 勾选 "添加到系统环境变量" 选项;
- SDK 导入:
- 打开 HiSpark Studio,点击 "SDK 管理";
- 选择 "导入本地 SDK",浏览至下载并解压的 BS21E SDK 路径;
- 确认 SDK 版本与开发板匹配(安信可 Ai-BS21 推荐 v1.0.3 及以上);
- 环境验证:
- 新建 "Hello World" 测试项目,选择 BS21E 芯片型号;
- 点击 "编译" 按钮,无报错则环境配置成功。
五、实战开发:两种实现路径
5.1 路径 1:AT 指令模式(快速验证,新手友好)
AT 指令模式无需编译代码,通过串口发送指令即可完成组网、测距等基础功能验证,以下为安信可 Ai-BS21 模组核心 AT 指令(需以具体模组手册为准):
5.1.1 基础测试指令
| AT 指令 | 功能描述 | 参数说明 | 返回示例 | 验证目的 |
|---|---|---|---|---|
| AT | 串口通信测试 | 无 | OK | 确认串口连接正常 |
| AT+ENTER | 进入 AT 指令模式 | 无 | +ENTER: OK | 切换至 AT 指令交互状态 |
| AT+RESET | 重启模组 | 无 | +RESET: OK | 模组异常时恢复初始状态 |
| AT+VERSION | 查询固件版本 | 无 | +VERSION: Ai-BS21_V1.0.3 | 确认 SDK 版本与开发板兼容 |
5.1.2 组网配置指令
| AT 指令 | 功能描述 | 参数说明 | 返回示例 | 操作流程 |
|---|---|---|---|---|
| AT+SLEMODE=<mode> | 设置节点角色 | mode=1(G 节点);mode=2(T 节点) | +SLEMODE: 1,OK | G 节点执行 AT+SLEMODE=1,T 节点执行 AT+SLEMODE=2 |
| AT+SLEDOMAIN=<domain> | 设置通信域 ID | domain 为 16 进制数(如 0x12345678) | +SLEDOMAIN: 0x12345678,OK | 所有节点需配置相同通信域 ID,避免跨域干扰 |
| AT+SLESCAN | 扫描周边 T 节点 | 无 | +SLESCAN: 0xAA00BB11,0xCC22DD33 | G 节点执行,获取可连接 T 节点地址列表 |
| AT+SLECONN=<addr> | 连接指定 T 节点 | addr 为扫描得到的 T 节点地址 | +SLECONN: 0xAA00BB11,OK | G 节点通过扫描结果中的地址连接目标 T 节点 |
5.1.3 测距核心指令
| AT 指令 | 功能描述 | 参数说明 | 返回示例 | 操作注意 |
|---|---|---|---|---|
| AT+SLERANGE=<interval> | 启动测距 | interval 为测距间隔(单位 ms,如 100) | +SLERANGE: START,OK | G 节点执行,按指定间隔发起测距 |
| AT+SLERESULT | 读取测距结果 | 无 | +SLERESULT: 0xAA00BB11,0.85 | 返回 T 节点地址与距离(单位:米) |
| AT+SLERANGESTOP | 停止测距 | 无 | +SLERANGESTOP: OK | 无需测距时执行,降低系统功耗 |
5.1.4 AT 指令实战验证流程
- 设备准备:1 块开发板设为 G 节点,1 块设为 T 节点;
- 基础配置:
- 双方执行 AT+ENTER 进入 AT 模式;
- 双方执行 AT+SLEDOMAIN=0x12345678 设置相同通信域;
- G 节点执行 AT+SLEMODE=1,T 节点执行 AT+SLEMODE=2;
- 组网连接:
- G 节点执行 AT+SLESCAN,获取 T 节点地址(如 0xAA00BB11);
- G 节点执行 AT+SLECONN=0xAA00BB11,建立连接;
- 测距验证:
- G 节点执行 AT+SLERANGE=100,启动测距;
- 多次执行 AT+SLERESULT,读取测距结果,移动 T 节点观察距离变化;
- 精度验证:对比实际距离与测距结果,误差应在 ±0.5m 内。
5.2 路径 2:SDK API 模式(正式开发,可落地部署)
5.2.1 项目创建流程(HiSpark Studio)
- 打开 HiSpark Studio,点击 "文件→新建→项目";
- 选择 "BS21E 芯片模板",输入项目名称(如 "bs21e_sle_ranging");
- 选择已导入的 BS21E SDK 路径,点击 "创建";
- 项目结构自动生成,包含核心目录:src(源代码)、inc(头文件)、config(配置文件)。
5.2.2 核心代码实现(基于安信可 Ai-BS21 SDK)
c
运行
/********* 头文件引入 *********/
#include "ai_bs21_sle.h" // 星闪SLE核心API
#include "ai_bs21_uart.h" // 串口通信API
#include "ai_bs21_gpio.h" // GPIO控制API
#include <math.h> // 数学库(定位算法依赖)
/********* 全局变量定义 *********/
// 3个锚点坐标(需按实际部署位置修改,示例为等边三角形布局)
float anchor_coords[3][2] = {{0.0f, 0.0f}, {5.0f, 0.0f}, {2.5f, 4.33f}};
// 存储锚点到T节点的测距结果
float distances[3] = {0.0f};
// 测距数据计数(用于收集3组有效数据)
uint8_t range_count = 0;
// 目标T节点地址(扫描后动态赋值)
uint32_t target_t_addr = 0;
/********* 串口初始化(调试信息输出)*********/
void uart_init(void) {
ai_bs21_uart_config_t uart_cfg = {
.baudrate = AI_BS21_UART_BAUDRATE_115200,
.data_bits = AI_BS21_UART_DATA_BITS_8,
.stop_bits = AI_BS21_UART_STOP_BITS_1,
.parity = AI_BS21_UART_PARITY_NONE
};
ai_bs21_uart_init(AI_BS21_UART_0, &uart_cfg);
printf("串口初始化完成!\n");
}
/********* 星闪SLE协议初始化 *********/
void sle_init(void) {
// 1. SLE协议栈初始化
ai_bs21_sle_stack_init();
printf("SLE协议栈初始化完成!\n");
// 2. 设置节点角色为G节点(网关)
ai_bs21_sle_set_role(AI_BS21_SLE_ROLE_GATEWAY);
printf("节点角色设置为G节点!\n");
// 3. 配置通信域ID(与T节点保持一致)
ai_bs21_sle_set_domain(0x12345678);
printf("通信域ID设置为0x12345678!\n");
// 4. 注册测距结果回调函数
ai_bs21_sle_register_ranging_cb(ranging_result_cb);
printf("测距回调函数注册完成!\n");
// 5. 启动星闪网络
ai_bs21_sle_start_network();
printf("星闪网络启动完成!\n");
}
/********* 测距结果回调函数(核心数据处理)*********/
void ranging_result_cb(ai_bs21_sle_ranging_data_t *data) {
// data->addr:T节点地址;data->distance:测距结果(米)
printf("收到T节点[0x%x]测距数据:%.2f 米\n", data->addr, data->distance);
// 仅处理目标T节点数据
if (data->addr == target_t_addr) {
// 收集3组测距数据
if (range_count < 3) {
distances[range_count] = data->distance;
range_count++;
printf("已收集%d组锚点测距数据\n", range_count);
// 数据收集完成后执行定位解算
if (range_count == 3) {
float x, y;
trilateration(anchor_coords, distances, &x, &y);
printf("T节点定位结果:(%.2f, %.2f) 米\n", x, y);
range_count = 0; // 重置计数,准备下一轮解算
}
}
}
}
/********* 三边定位算法(通用实现,可直接复用)*********/
void trilateration(float anchors[3][2], float dists[3], float *x, float *y) {
// 提取锚点坐标与测距距离
float x1 = anchors[0][0], y1 = anchors[0][1], d1 = dists[0];
float x2 = anchors[1][0], y2 = anchors[1][1], d2 = dists[1];
float x3 = anchors[2][0], y3 = anchors[2][1], d3 = dists[2];
// 最小二乘法解算(消除测距误差)
float A = 2 * (x2 - x1);
float B = 2 * (y2 - y1);
float C = d1*d1 - d2*d2 - x1*x1 + x2*x2 - y1*y1 + y2*y2;
float D = 2 * (x3 - x2);
float E = 2 * (y3 - y2);
float F = d2*d2 - d3*d3 - x2*x2 + x3*x3 - y2*y2 + y3*y3;
// 计算T节点坐标
*x = (B*F - E*C) / (B*D - E*A);
*y = (D*C - A*F) / (B*D - E*A);
}
/********* 扫描并连接T节点 *********/
void connect_t_node(void) {
uint32_t t_addrs[10]; // 存储扫描到的T节点地址
uint8_t t_count = ai_bs21_sle_scan_t_nodes(t_addrs, 10);
printf("扫描到%d个T节点\n", t_count);
if (t_count > 0) {
target_t_addr = t_addrs[0]; // 选择第一个扫描到的T节点
printf("目标T节点地址:0x%x\n", target_t_addr);
// 连接目标T节点
if (ai_bs21_sle_connect_t_node(target_t_addr) == AI_BS21_OK) {
printf("T节点连接成功!\n");
} else {
printf("T节点连接失败!\n");
}
} else {
printf("未扫描到可用T节点!\n");
}
}
/********* 主函数(程序入口)*********/
int main(void) {
// 1. 硬件初始化
uart_init();
// 2. 星闪SLE初始化
sle_init();
// 3. 扫描并连接T节点
connect_t_node();
// 4. 启动测距(间隔100ms)
if (target_t_addr != 0) {
ai_bs21_sle_start_ranging(target_t_addr, 100);
printf("测距启动,间隔100ms\n");
}
// 5. 主循环(维持程序运行)
while (1) {
ai_bs21_delay_ms(10);
}
return 0;
}5.2.3 代码编译与烧录流程
- 代码编译:
- 在 HiSpark Studio 中打开项目,点击左侧 "编译" 按钮;
- 编译完成后,查看控制台输出,无 "error" 则编译成功,生成.bin 格式固件;
- 固件烧录:
- 连接开发板与电脑,确保串口 / 调试器正常识别;
- 点击 HiSpark Studio 中 "烧录" 按钮,选择生成的.bin 固件;
- 等待烧录完成,控制台输出 "烧录成功" 即可;
- 调试验证:
- 打开串口工具,配置波特率 115200;
- 重启开发板,观察串口输出,确认初始化、连接、测距、定位流程正常。
5.2.4 常见开发问题与解决
| 问题现象 | 可能原因 | 解决方案 |
|---|---|---|
| 编译报错 "函数未定义" | SDK 版本不匹配或头文件未引入 | 1. 更换与开发板兼容的 SDK 版本;2. 检查代码中是否引入对应头文件 |
| 收不到测距回调数据 | 回调函数未注册或节点连接失败 | 1. 确认回调函数注册语句执行;2. 检查 G/T 节点通信域是否一致;3. 重新连接 T 节点 |
| 定位结果偏差极大 | 锚点坐标与实际部署位置不符 | 按实际部署位置修正 anchor_coords 数组中的坐标值 |
| 烧录失败 | 串口 / 调试器连接异常或固件格式错误 | 1. 检查硬件连接;2. 确认固件为.bin 格式且与芯片匹配 |
六、算法深度解析与优化
6.1 三边定位算法基础优化
6.1.1 滑动平均滤波(消除随机误差)
c
运行
/**
* @brief 滑动平均滤波函数
* @param new_data 新的测距数据
* @param history 历史数据缓存数组
* @param count 缓存数据长度(推荐5-10)
* @return 滤波后的结果
*/
float sliding_average(float new_data, float *history, uint8_t count) {
float sum = 0.0f;
// 数据移位(旧数据后移,新数据存入首位)
for (int i = count - 1; i > 0; i--) {
history[i] = history[i - 1];
}
history[0] = new_data;
// 计算平均值
for (int i = 0; i < count; i++) {
sum += history[i];
}
return sum / count;
}应用方式:在测距回调函数中对原始数据滤波后再用于定位:
c
运行
float dist_history[5] = {0.0f}; // 历史数据缓存
void ranging_result_cb(ai_bs21_sle_ranging_data_t *data) {
// 滤波处理
float filtered_dist = sliding_average(data->distance, dist_history, 5);
printf("原始距离:%.2f 米,滤波后:%.2f 米\n", data->distance, filtered_dist);
// 用滤波后的数据填充距离数组
if (range_count < 3) {
distances[range_count] = filtered_dist;
range_count++;
}
}6.1.2 锚点校准(消除安装误差)
校准流程:
- 在锚点覆盖区域内设置已知精确坐标的校准点(至少 3 个);
- 启动系统,测量各锚点到校准点的测距距离;
- 基于校准点坐标和测距距离,反推锚点实际坐标,修正 anchor_coords 数组;
- 重复校准 3 次,确保锚点坐标误差 < 0.1m。
6.1.3 异常值剔除(消除极端误差)
c
运行
/**
* @brief 异常值剔除函数
* @param new_data 新的测距数据
* @param last_data 上一次有效数据
* @param threshold 误差阈值(推荐0.5m)
* @return 有效数据
*/
float remove_outlier(float new_data, float last_data, float threshold) {
if (fabs(new_data - last_data) > threshold) {
return last_data; // 异常值,返回上一次有效数据
} else {
return new_data; // 正常数据,返回新数据
}
}6.2 卡尔曼滤波(工业级精度优化)
适用于对定位稳定性要求较高的场景,以下是简化版实现:
c
运行
// 卡尔曼滤波参数结构体
typedef struct {
float x; // 估计值
float P; // 估计误差协方差
float Q; // 过程噪声协方差
float R; // 测量噪声协方差
} kalman_filter_t;
/**
* @brief 卡尔曼滤波初始化
* @param kf 滤波参数结构体指针
* @param init_x 初始估计值
* @param init_P 初始误差协方差
* @param Q 过程噪声协方差(推荐0.01)
* @param R 测量噪声协方差(推荐0.1)
*/
void kalman_init(kalman_filter_t *kf, float init_x, float init_P, float Q, float R) {
kf->x = init_x;
kf->P = init_P;
kf->Q = Q;
kf->R = R;
}
/**
* @brief 卡尔曼滤波更新
* @param kf 滤波参数结构体指针
* @param z 测量值(定位算法输出结果)
* @return 滤波后的估计值
*/
float kalman_update(kalman_filter_t *kf, float z) {
// 预测阶段
kf->P += kf->Q;
// 更新阶段
float K = kf->P / (kf->P + kf->R); // 卡尔曼增益
kf->x += K * (z - kf->x); // 估计值更新
kf->P = (1 - K) * kf->P; // 误差协方差更新
return kf->x;
}应用方式:
c
运行
// 初始化x、y方向卡尔曼滤波器
kalman_filter_t kf_x, kf_y;
kalman_init(&kf_x, 0.0f, 1.0f, 0.01f, 0.1f);
kalman_init(&kf_y, 0.0f, 1.0f, 0.01f, 0.1f);
// 在定位解算后应用滤波
void trilateration(float anchors[3][2], float dists[3], float *x, float *y) {
// 原始定位解算
...
// 卡尔曼滤波优化
float x_filtered = kalman_update(&kf_x, *x);
float y_filtered = kalman_update(&kf_y, *y);
// 更新输出结果
*x = x_filtered;
*y = y_filtered;
printf("滤波后定位结果:(%.2f, %.2f) 米\n", *x, *y);
}6.3 多边定位算法(多锚点优化)
支持≥4 个锚点,通过最小二乘法提升定位精度:
c
运行
/**
* @brief 多边定位算法
* @param anchors 锚点坐标数组(n≥4)
* @param dists 测距距离数组
* @param n 锚点数量
* @param x 定位结果x坐标
* @param y 定位结果y坐标
*/
void multilateration(float anchors[][2], float dists[], uint8_t n, float *x, float *y) {
float A[n][2], B[n];
float sum_Ax = 0.0f, sum_Ay = 0.0f, sum_AxAy = 0.0f;
float sum_Ax2 = 0.0f, sum_Ay2 = 0.0f, sum_AxB = 0.0f, sum_AyB = 0.0f;
// 构建方程组
for (int i = 0; i < n; i++) {
A[i][0] = 2 * (anchors[i][0] - anchors[0][0]);
A[i][1] = 2 * (anchors[i][1] - anchors[0][1]);
B[i] = dists[0]*dists[0] - dists[i]*dists[i]
- anchors[0][0]*anchors[0][0] + anchors[i][0]*anchors[i][0]
- anchors[0][1]*anchors[0][1] + anchors[i][1]*anchors[i][1];
// 累加计算最小二乘所需参数
sum_Ax += A[i][0];
sum_Ay += A[i][1];
sum_AxAy += A[i][0] * A[i][1];
sum_Ax2 += A[i][0] * A[i][0];
sum_Ay2 += A[i][1] * A[i][1];
sum_AxB += A[i][0] * B[i];
sum_AyB += A[i][1] * B[i];
}
// 最小二乘法解算
float denominator = sum_Ax2 * sum_Ay2 - sum_AxAy * sum_AxAy;
*x = (sum_Ay2 * sum_AxB - sum_AxAy * sum_AyB) / denominator;
*y = (sum_Ax2 * sum_AyB - sum_AxAy * sum_AxB) / denominator;
}实战建议:锚点数量推荐 4-6 个,过多会增加计算复杂度,性价比降低。
七、硬件部署与优化
7.1 天线选型与布局优化
| 天线类型 | 增益 | 适用节点 | 布局要求 | 推荐型号 |
|---|---|---|---|---|
| 全向胶棒天线 | 2dBi | T 节点、小型 G 节点 | 垂直放置,远离金属物体≥3cm | 2.4G SMA 接口胶棒天线 |
| 贴片天线 | 3dBi | 集成式 G 节点(如车载网关) | 贴于 PCB 边缘,与其他元器件间距≥2cm | 2.4G IPEX 接口贴片天线 |
| 平板天线 | 5dBi | 远距离 G 节点(如车间中控) | 朝向待定位区域,无遮挡 | 2.4G SMA 接口平板天线 |
布局优化技巧:
- G 节点多天线间距≥6cm(2.4G 信号波长 λ≈12.5cm,间距≥λ/2 可减少干扰);
- 天线远离电源模块、金属外壳等干扰源;
- 射频电路周围增加屏蔽罩,接地良好,减少电磁辐射干扰;
- 天线馈线尽量短,避免信号衰减。
7.2 锚点布局场景化方案
| 应用场景 | 布局方式 | 锚点数量 | 锚点间距 | 定位精度 | 部署注意事项 |
|---|---|---|---|---|---|
| 小房间(<20㎡) | 等边三角形布局 | 3 个 | 3-5 米 | ±0.5m | 锚点部署于墙角,高度 1.5-2 米 |
| 大房间(20-50㎡) | 正方形布局 | 4 个 | 5-8 米 | ±0.3m | 锚点部署于四角,中心区域无遮挡 |
| 工业车间(>50㎡) | 网格布局 | 6-8 个 | 8-10 米 | ±0.4m | 锚点高度 2-3 米,避开设备遮挡 |
| 车载场景 | 三角形布局(车门 / 后视镜 / 后备箱) | 3 个 | 1-2 米 | ±0.2m | 远离车载雷达、功放等强干扰源 |
部署避坑要点:
- 锚点不可布置在同一直线上,避免定位算法退化;
- 锚点应部署在视野开阔处,减少遮挡;
- 锚点坐标记录准确,需与实际部署位置一致。
7.3 射频性能优化
| 优化方向 | 具体措施 | 实施效果 |
|---|---|---|
| 跳频优化 | 启用 79 个全频点跳频,避开 WiFi 常用频点(1、6、11 信道) | 测距数据跳变幅度从 ±0.5m 降至 ±0.2m |
| 阻抗匹配 | 射频电路按 50Ω 阻抗设计,PCB 走线优化,减少反射 | 信号传输效率提升 10%,测距距离增加 5-10 米 |
| 电源滤波 | 射频模块电源端增加 π 型滤波电路(电容 + 电感) | 电源纹波降低 30%,信号信噪比提升 20% |
| 屏蔽设计 | 射频芯片与天线接口周围增加金属屏蔽罩,接地良好 | 抗电磁干扰能力提升 30%,复杂环境下稳定性增强 |
7.4 T 节点功耗优化方案
| 工作模式 | 工作电流 | 续航(2000mAh 电池) | 适用场景 | 实现方式 |
|---|---|---|---|---|
| 持续测距(100ms 间隔) | 15mA | 约 5 天 | 实时定位(如数字车钥匙) | 固定测距间隔 100ms |
| 动态测距(静止 1s / 移动 100ms) | 5mA | 约 15 天 | 混合场景(如智能家居) | 结合加速度传感器判断运动状态,动态调整间隔 |
| 事件触发测距 | 2mA | 约 38 天 | 低功耗场景(如资产追踪) | 仅当 T 节点移动时触发测距 |
| 休眠模式 | <1mA | 约 2 年 | 待机场景 | 无测距需求时进入休眠,定时唤醒扫描 |
动态测距实现代码:
c
运行
/**
* @brief 动态调整测距间隔
* @param motion_state 运动状态(0=静止,1=移动)
*/
void dynamic_ranging_interval(uint8_t motion_state) {
if (motion_state == 0) {
// 静止状态,测距间隔1000ms
ai_bs21_sle_set_ranging_interval(1000);
} else {
// 移动状态,测距间隔100ms
ai_bs21_sle_set_ranging_interval(100);
}
}八、典型应用场景落地
8.1 场景 1:数字车钥匙(成熟落地场景)
8.1.1 组网架构
| 节点类型 | 部署位置 | 硬件配置 | 核心功能 |
|---|---|---|---|
| G 节点 | 车载中控 | BS21E 芯片 + 3 根天线 + 车载 12V 转 3.3V 电源 | 1. 车辆唤醒后扫描周边 T 节点;2. 与手机 T 节点双向测距;3. 多锚点数据融合;4. 控制车门解锁 / 闭锁 |
| T 节点 | 用户手机 | 星闪兼容模组(含 BS21E)+ 单天线 + 手机电池 | 1. 响应 G 节点测距请求;2. 上报设备身份信息;3. 接收解锁 / 闭锁状态通知 |
8.1.2 核心功能代码
c
运行
#define UNLOCK_DISTANCE 3.0f // 解锁距离阈值(3米)
#define LOCK_DISTANCE 8.0f // 闭锁距离阈值(8米)
#define FILTER_COUNT 5 // 滤波数据长度
uint8_t car_door_state = 0; // 车门状态:0=闭锁,1=解锁
float dist_history[FILTER_COUNT] = {0.0f}; // 测距数据滤波缓存
/**
* @brief 数字车钥匙核心逻辑
* @param distance 滤波后的测距距离
*/
void car_key_logic(float distance) {
// 解锁逻辑
if (distance < UNLOCK_DISTANCE && car_door_state == 0) {
ai_bs21_gpio_set_level(AI_BS21_GPIO_0, 1); // 控制解锁继电器
car_door_state = 1;
printf("车门解锁!当前距离:%.2f 米\n", distance);
}
// 闭锁逻辑
if (distance > LOCK_DISTANCE && car_door_state == 1) {
ai_bs21_gpio_set_level(AI_BS21_GPIO_0, 0); // 控制闭锁继电器
car_door_state = 0;
printf("车门闭锁!当前距离:%.2f 米\n", distance);
}
}
// 测距回调函数中调用
void ranging_result_cb(ai_bs21_sle_ranging_data_t *data) {
if (data->addr == phone_t_addr) { // 仅处理手机T节点
float filtered_dist = sliding_average(data->distance, dist_history, FILTER_COUNT);
car_key_logic(filtered_dist);
}
}8.1.3 部署优化要点
- 锚点布局:3 个锚点分别部署于车门、后视镜、后备箱,形成三角形覆盖;
- 响应速度:测距间隔设为 50ms,确保解锁 / 闭锁实时性;
- 安全防护:在测距信号中加入随机扰动,防止中继攻击;
- 兼容性:支持 BLE/SLE 双模,适配不同手机型号。
8.2 场景 2:智能家居定位(全屋智能场景)
8.2.1 组网架构
| 节点类型 | 部署位置 | 硬件配置 | 核心功能 |
|---|---|---|---|
| G 节点 | 智能家居网关(客厅中心) | BS21E 芯片 + 4 根天线 + 市电供电 | 1. 管理所有智能设备 T 节点;2. 与用户手机 T 节点测距定位;3. 输出用户位置信息;4. 下发设备控制指令 |
| T 节点(手机) | 用户手机 | 星闪兼容模组 + 单天线 + 手机电池 | 1. 响应 G 节点测距请求;2. 上报位置相关数据 |
| T 节点(智能设备) | 灯、空调、窗帘等 | 星闪兼容模组 + 单天线 + 市电 / 电池 | 1. 接收 G 节点控制指令;2. 执行开关、调节等操作;3. 上报设备状态 |
8.2.2 核心功能代码
c
运行
// 区域定义(单位:米)
#define LIVING_ROOM_X1 0.0f, LIVING_ROOM_Y1 0.0f
#define LIVING_ROOM_X2 5.0f, LIVING_ROOM_Y2 4.0f
#define BED_ROOM_X1 5.0f, BED_ROOM_Y1 0.0f
#define BED_ROOM_X2 10.0f, BED_ROOM_Y2 4.0f
// 智能设备地址定义
uint32_t living_room_light_addr = 0x11223344; // 客厅灯T节点地址
uint32_t bed_room_light_addr = 0x55667788; // 卧室灯T节点地址
/**
* @brief 判断用户所在区域
* @param x 用户x坐标
* @param y 用户y坐标
* @return 区域标识:1=客厅,2=卧室,0=其他
*/
uint8_t get_user_area(float x, float y) {
// 客厅区域判断
if (x >= LIVING_ROOM_X1 && x <= LIVING_ROOM_X2 && y >= LIVING_ROOM_Y1 && y <= LIVING_ROOM_Y2) {
return 1;
}
// 卧室区域判断
if (x >= BED_ROOM_X1 && x <= BED_ROOM_X2 && y >= BED_ROOM_Y1 && y <= BED_ROOM_Y2) {
return 2;
}
return 0;
}
/**
* @brief 智能设备控制逻辑
* @param area 用户所在区域
*/
void smart_home_control(uint8_t area) {
static uint8_t last_area = 0;
// 进入客厅
if (area == 1 && last_area != 1) {
ai_bs21_sle_send_cmd(living_room_light_addr, "ON"); // 打开客厅灯
ai_bs21_sle_send_cmd(bed_room_light_addr, "OFF"); // 关闭卧室灯
printf("用户进入客厅,打开客厅灯\n");
}
// 进入卧室
else if (area == 2 && last_area != 2) {
ai_bs21_sle_send_cmd(bed_room_light_addr, "ON"); // 打开卧室灯
ai_bs21_sle_send_cmd(living_room_light_addr, "OFF");// 关闭客厅灯
printf("用户进入卧室,打开卧室灯\n");
}
// 离开所有区域
else if (area == 0 && last_area != 0) {
ai_bs21_sle_send_cmd(living_room_light_addr, "OFF");
ai_bs21_sle_send_cmd(bed_room_light_addr, "OFF");
printf("用户离开,关闭所有灯\n");
}
last_area = area;
}
// 定位解算后调用
void trilateration(float anchors[3][2], float dists[3], float *x, float *y) {
// 原始定位解算
...
// 卡尔曼滤波优化
float x_filtered = kalman_update(&kf_x, *x);
float y_filtered = kalman_update(&kf_y, *y);
// 判断区域并控制设备
uint8_t area = get_user_area(x_filtered, y_filtered);
smart_home_control(area);
}8.2.3 部署优化要点
- G 节点部署于客厅中心,确保信号覆盖全屋;
- 智能设备 T 节点采用低功耗模式,1s 间隔上报状态;
- 增加延迟关闭逻辑(如用户离开 5 分钟后关闭设备),避免误操作;
- 支持多用户识别,区分不同用户的设备控制权限。
8.3 场景 3:工业资产追踪(工厂 / 仓库场景)
8.3.1 组网架构
| 节点类型 | 部署位置 | 硬件配置 | 核心功能 |
|---|---|---|---|
| 主 G 节点 | 车间中控室 | BS21E 芯片 + 4 根天线 + 市电供电 + 工业级网关 | 1. 管理所有从 G 节点;2. 接收定位数据;3. 显示资产实时位置;4. 异常情况报警 |
| 从 G 节点 | 车间角落 / 仓库货架 | BS21E 芯片 + 2 根天线 + 市电供电 | 1. 与资产 T 节点测距;2. 上报测距数据至主 G 节点;3. 覆盖局部区域 |
| T 节点(资产标签) | 设备 / 物料箱 | BS21E 芯片 + 单天线 + 锂电池(3.6V) | 1. 响应从 G 节点测距请求;2. 低功耗运行;3. 上报资产 ID 信息 |
8.3.2 核心功能代码
c
运行
#define ALARM_DISTANCE 10.0f // 资产安全距离阈值(10米)
#define FILTER_COUNT 10 // 滤波数据长度
uint32_t asset_t_addr = 0xCC22DD33; // 目标资产T节点地址
float dist_history[FILTER_COUNT] = {0.0f}; // 测距数据缓存
uint8_t alarm_state = 0; // 报警状态:0=正常,1=报警
/**
* @brief 资产追踪与报警逻辑
* @param distance 滤波后的测距距离
*/
void asset_tracking(float distance) {
printf("资产当前距离:%.2f 米\n", distance);
// 超距报警逻辑
if (distance > ALARM_DISTANCE && alarm_state == 0) {
ai_bs21_sle_send_data(main_g_addr, "ALARM: ASSET_MOVED"); // 向主G节点发送报警信息
ai_bs21_gpio_set_level(AI_BS21_GPIO_1, 1); // 控制本地声光报警
alarm_state = 1;
printf("资产超出安全范围,触发报警!\n");
}
// 恢复正常逻辑
else if (distance <= ALARM_DISTANCE && alarm_state == 1) {
ai_bs21_sle_send_data(main_g_addr, "ALARM: CLEAR");
ai_bs21_gpio_set_level(AI_BS21_GPIO_1, 0);
alarm_state = 0;
printf("资产恢复正常,报警解除!\n");
}
}
// 测距回调函数中调用
void ranging_result_cb(ai_bs21_sle_ranging_data_t *data) {
if (data->addr == asset_t_addr) {
float filtered_dist = sliding_average(data->distance, dist_history, FILTER_COUNT);
asset_tracking(filtered_dist);
}
}8.3.3 部署优化要点
- 从 G 节点间距 8-10 米,采用网格布局覆盖整个车间 / 仓库;
- 资产 T 节点采用事件触发测距模式,仅移动时唤醒测距,续航可达 6 个月;
- 增加离线报警逻辑:从 G 节点 1 分钟内未收到 T 节点响应,触发离线报警;
- 主 G 节点与从 G 节点通过工业以太网连接,确保数据传输稳定性。
九、问题排查与避坑指南
9.1 常见问题与解决方案
| 问题现象 | 可能原因 | 解决方案 |
|---|---|---|
| 串口无调试信息输出 | 1. 串口驱动未安装;2. 波特率不匹配;3. TX/RX 接线反接 | 1. 安装 CH340 等对应驱动;2. 确认波特率为 115200(8N1);3. 调换 TX/RX 接线 |
| G 节点扫描不到 T 节点 | 1. 通信域 ID 不一致;2. 节点角色设置错误;3. 距离超出通信范围;4. 干扰严重 | 1. 确保所有节点通信域 ID 相同;2. 确认 G 节点设为 1,T 节点设为 2;3. 缩短距离至 10 米内;4. 移至无强干扰环境或启用跳频 |
| 测距结果跳变严重 | 1. 天线未接好或选型不当;2. 周围有强电磁干扰;3. 未启用跳频;4. 未滤波 | 1. 检查天线连接,更换增益≥2dBi 的天线;2. 远离 WiFi 路由器、蓝牙设备等干扰源;3. 启用 79 个全频点跳频;4. 加入滑动平均滤波 |
| 定位结果偏差极大 | 1. 锚点坐标与实际部署位置不符;2. 测距数据未优化;3. 锚点布局不合理 | 1. 重新校准锚点坐标;2. 启用滤波与异常值剔除;3. 调整锚点为三角形 / 正方形布局 |
| 编译报错 "函数未定义" | 1. SDK 版本不兼容;2. 头文件未引入;3. 项目配置错误 | 1. 更换与开发板匹配的 SDK 版本;2. 检查代码中是否引入对应头文件(如 ai_bs21_sle.h);3. 重新配置项目 SDK 路径 |
| 烧录失败 | 1. 调试器 / 串口连接异常;2. 开发板未上电;3. 固件格式错误 | 1. 检查硬件连接,确保接触良好;2. 确认开发板供电正常;3. 生成.bin 格式固件,核对烧录地址 |
| T 节点续航时间短 | 1. 测距间隔过短;2. 未启用休眠模式;3. 电源管理配置错误 | 1. 动态调整测距间隔(静止时增大);2. 启用休眠模式,仅必要时唤醒;3. 优化电源管理代码,降低待机电流 |
| 高并发场景下连接不稳定 | 1. 未开启高并发模式;2. 通信域冲突;3. 射频功率不足 | 1. 按 SDK 文档开启高并发模式;2. 使用唯一通信域 ID,避免与其他网络冲突;3. 调整射频功率至最大(≤10dBm) |
| 遮挡场景下定位丢失 | 1. 锚点数量不足;2. 无融合定位;3. 测距间隔过长 | 1. 增加锚点数量至 4 个以上;2. 集成惯性导航,实现融合定位;3. 缩短测距间隔至 50ms |
| 星闪与蓝牙双模冲突 | 1. 未启用双模隔离;2. 频点重叠;3. 天线共用 | 1. 按 SDK 配置启用双模隔离功能;2. 配置星闪与蓝牙使用不同频点;3. 分开使用独立天线,避免信号干扰 |
9.2 推荐调试工具
| 工具名称 | 核心用途 | 推荐型号 / 版本 | 价格范围 |
|---|---|---|---|
| 频谱分析仪 | 分析射频信号,排查干扰源 | 简易 2.4G 频谱分析仪 | 500 元左右 |
| 串口工具 | 调试信息打印、AT 指令交互 | XCOM(免费)、SecureCRT(付费) | 免费 / 付费 |
| 万用表 | 测量电压、电流,排查电源问题 | 数字万用表(精度≥0.1V) | 50 元左右 |
| 示波器 | 分析信号波形,排查硬件故障 | 入门级双通道示波器(≥100MHz) | 1000 元左右 |
| SWD 调试器 | SDK 代码断点调试、固件烧录 | J-Link Base | 100 元左右 |
十、技术总结与展望
10.1 核心技术要点
- 定位方案:BS21E 基于星闪 SLE 协议的 TOF + 相位差复合测距,配合多锚点组网与三边 / 多边定位算法,实现亚米级精度;
- 开发路径:新手可通过 AT 指令快速验证功能,正式项目基于 HiSpark Studio+BS21E SDK 开发,核心需关注回调函数、定位算法与硬件优化;
- 优化方向:精度优化需结合硬件布局(天线、锚点)与算法优化(滤波、校准),功耗优化重点在 T 节点的测距间隔与休眠模式;
- 落地关键:锚点坐标准确性、通信域唯一性、射频抗干扰设计是场景落地的核心保障。
10.2 技术发展展望
- 成本下降:随着星闪生态规模化发展,BS21E 模组成本有望降至 30 元以内,进一步推动大规模应用;
- 精度提升:下一代星闪芯片可能融合更多测距技术,定位精度有望提升至 ±0.1m,接近 UWB 水平;
- 场景拓展:除现有数字车钥匙、智能家居、工业资产追踪外,将向无人机编队、机器人导航、室内人员定位等场景延伸;
- 生态完善:更多厂商将推出 BS21E 相关开发板、模组与工具链,开发门槛进一步降低,文档与社区支持更完善。
10.3 落地建议
- 选型阶段:根据场景需求确认精度、功耗、并发量要求,优先选择成熟模组(如安信可 Ai-BS21),减少底层开发工作量;
- 开发阶段:先通过 AT 指令验证核心功能,再基于 SDK 开发,重点测试测距稳定性与定位精度;
- 部署阶段:严格按场景化锚点布局方案部署,做好射频优化与校准,确保系统稳定性;
- 运维阶段:建立设备状态监控机制,定期校准锚点坐标,及时排查干扰与连接问题。