文章目录
- [一、 欧几里得几何运算](#一、 欧几里得几何运算)
-
- [1. 基本概念](#1. 基本概念)
- [2. 使用方法](#2. 使用方法)
-
- [使用 math 模块进行基础几何计算](#使用 math 模块进行基础几何计算)
- [使用 NumPy 进行向量与矩阵运算](#使用 NumPy 进行向量与矩阵运算)
- [3. 应用场景](#3. 应用场景)
- [二、 解析几何运算](#二、 解析几何运算)
- [三、 射影几何运算](#三、 射影几何运算)
-
- [1. 基本概念](#1. 基本概念)
- [2. 使用方法](#2. 使用方法)
-
- [使用 OpenCV 进行射影变换](#使用 OpenCV 进行射影变换)
- [四、 微分几何运算](#四、 微分几何运算)
-
- [1. 基本概念](#1. 基本概念)
- [2. 使用方法](#2. 使用方法)
-
- [使用 NumPy 计算曲线曲率](#使用 NumPy 计算曲线曲率)
- 三维曲面法向量计算
- [五、 总结](#五、 总结)
- [六、 相关文章](#六、 相关文章)
几何运算是使用数学方法研究空间中的点、线、面、体等几何对象的性质和关系的计算过程。它通过代数、向量和微积分等工具,解决几何图形的测量、变换、关系和空间分析等问题。本篇介绍欧几里得几何运算、解析几何运算、射影几何运算和微分几何运算。
一、 欧几里得几何运算
欧几里得几何是经典几何学的基础,主要研究点、线、面在平面和空间中的位置、距离、角度等关系。在Python中,可以使用基础数学库和向量运算库来实现常见的欧几里得几何计算。
欧几里得几何运算可以直观理解为在平面上量距离、画图形、测角度的过程。
1. 基本概念
核心概念:距离、角度、面积、体积
直观理解:
- 距离计算 = 勾股定理的扩展
- 角度计算 = 余弦定理的应用
- 面积计算 = 海伦公式
关键理解:
- 距离是"最短的直线路径":在平面上,两点间直线最短
- 角度是"转向的幅度":从一条线转到另一条线需要转多少
- 几何运算就是测量和计算:用数学公式把直观的图形关系量化
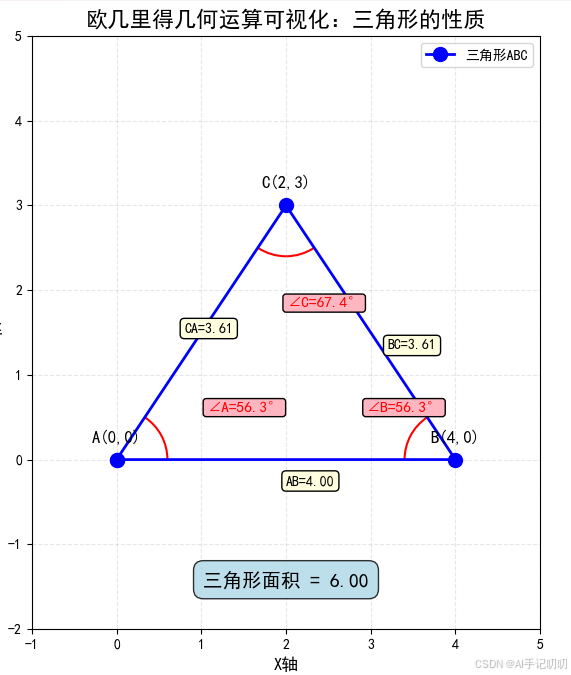
可视化理解 :
三角形及其性质:
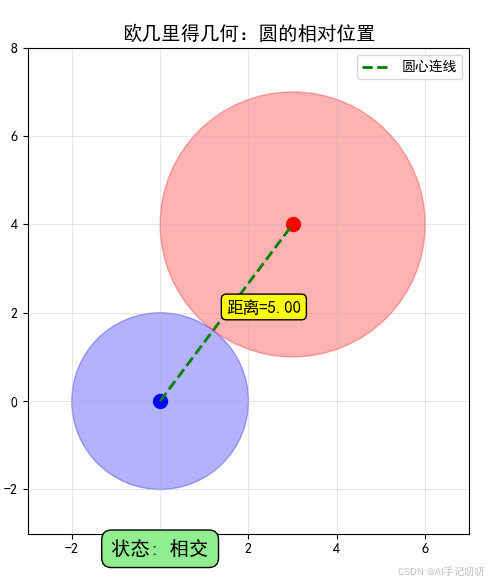
圆与距离:
2. 使用方法
使用 math 模块进行基础几何计算
python
import math
def distance(x1, y1, x2, y2):
"""计算两点之间的欧氏距离"""
return math.sqrt((x2 - x1)**2 + (y2 - y1)**2)
def distance2(p1, p2):
"""计算两点之间的欧氏距离"""
return math.dist(p1, p2) # Python 3.8+ p1 和 p2 为 (x, y) 元组或列表
def angle_between(v1, v2):
"""
计算两个二维向量之间的夹角(弧度)
"""
dot_product = v1[0]*v2[0] + v1[1]*v2[1]
norm1 = math.sqrt(v1[0]**2 + v1[1]**2)
norm2 = math.sqrt(v2[0]**2 + v2[1]**2)
return math.acos(dot_product / (norm1 * norm2))
def triangle_area(a, b, c):
"""
使用海伦公式计算三角形面积
a, b, c: 三角形三边长度
"""
s = (a + b + c) / 2
return math.sqrt(s * (s - a) * (s - b) * (s - c))
if __name__ == '__main__':
print("距离:", distance(0, 0, 3, 4))
print("夹角:", angle_between((1, 0), (0, 1)))
print("三角形面积:", triangle_area(3, 4, 5))使用 NumPy 进行向量与矩阵运算
python
import numpy as np
# 创建向量
v1 = np.array([1, 2, 3])
v2 = np.array([4, 5, 6])
# 基础运算
print(np.dot(v1, v2)) # 点积: 32
print(np.cross(v1, v2)) # 叉积: [-3, 6, -3]
print(np.linalg.norm(v1)) # 模长: 3.7417
# 投影计算
proj = np.dot(v1, v2) / np.dot(v2, v2) * v23. 应用场景
游戏开发中的碰撞检测
python
import math
def distance(x1, y1, x2, y2):
return math.sqrt((x2 - x1) ** 2 + (y2 - y1) ** 2)
def circle_collision(c1, r1, c2, r2):
dist = distance(c1[0], c1[1], c2[0], c2[1])
return dist <= (r1 + r2)
def point_in_triangle(px, py, v1, v2, v3):
def sign(p1, p2, p3):
return (p1[0] - p3[0]) * (p2[1] - p3[1]) - (p2[0] - p3[0]) * (p1[1] - p3[1])
d1 = sign((px, py), v1, v2)
d2 = sign((px, py), v2, v3)
d3 = sign((px, py), v3, v1)
has_neg = (d1 < 0) or (d2 < 0) or (d3 < 0)
has_pos = (d1 > 0) or (d2 > 0) or (d3 > 0)
return not (has_neg and has_pos)
if __name__ == '__main__':
print("圆碰撞:", circle_collision((0, 0), 5, (8, 0), 3))
print("点在三角形内:", point_in_triangle(2, 2, (0, 0), (4, 0), (2, 4)))图形学中的变换
python
import numpy as np
def transform_point(point, angle=0, scale=(1, 1), origin=(0, 0)):
"""组合变换:旋转 + 缩放"""
angle_rad = np.radians(angle)
rot_matrix = np.array([
[np.cos(angle_rad), -np.sin(angle_rad)],
[np.sin(angle_rad), np.cos(angle_rad)]
])
scaled = np.array(scale) * (np.array(point) - np.array(origin))
rotated = rot_matrix @ scaled
return tuple(rotated + np.array(origin))
print(transform_point((1, 0), angle=90)) 二、 解析几何运算
解析几何将几何问题转化为代数问题,通过坐标系和方程来研究几何对象。Python中可使用符号计算库如 SymPy 进行解析几何运算。
解析几何的核心思想就是用代数方程描述几何图形
1. 基本概念
核心概念:坐标系、代数方程、参数方程
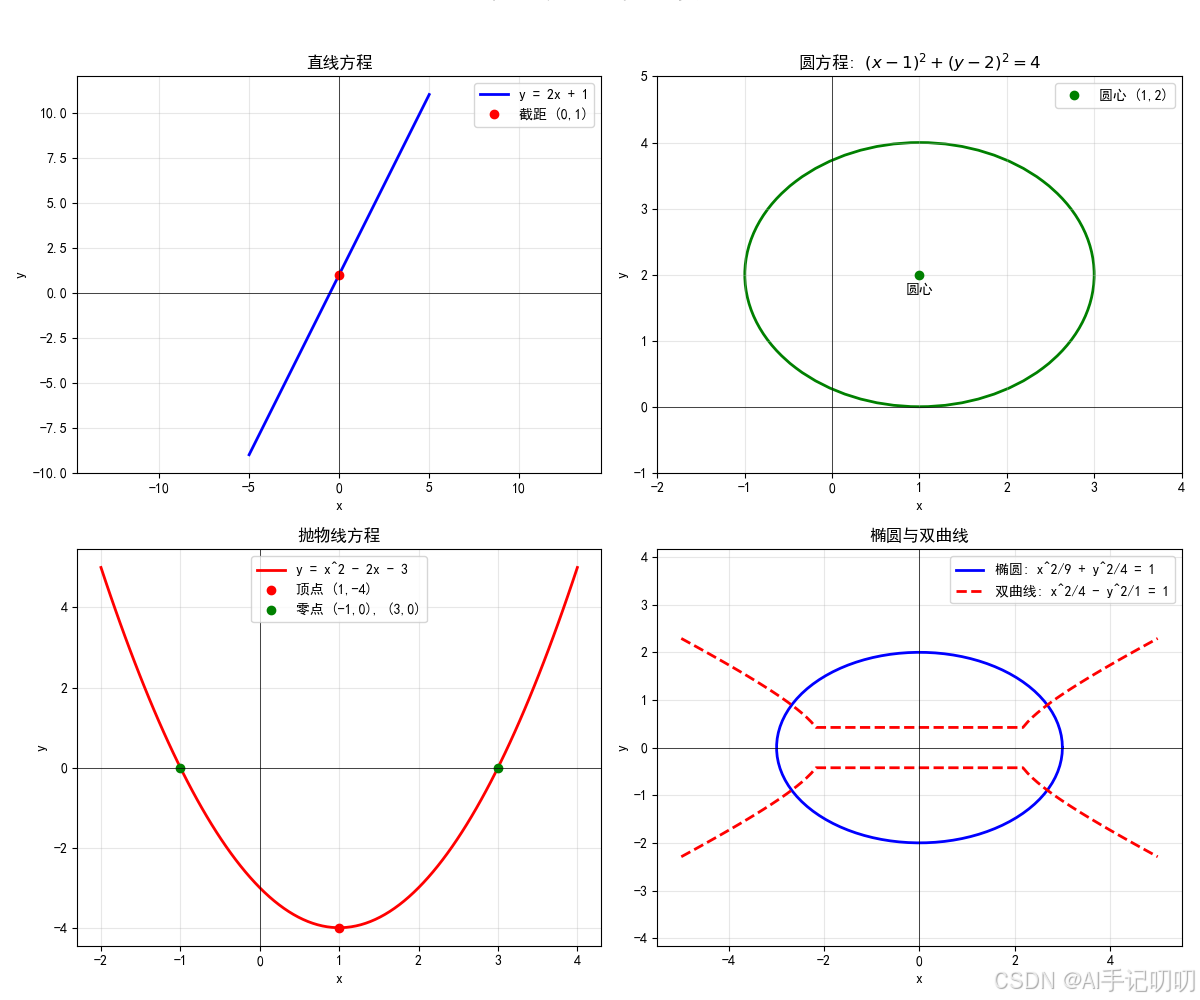
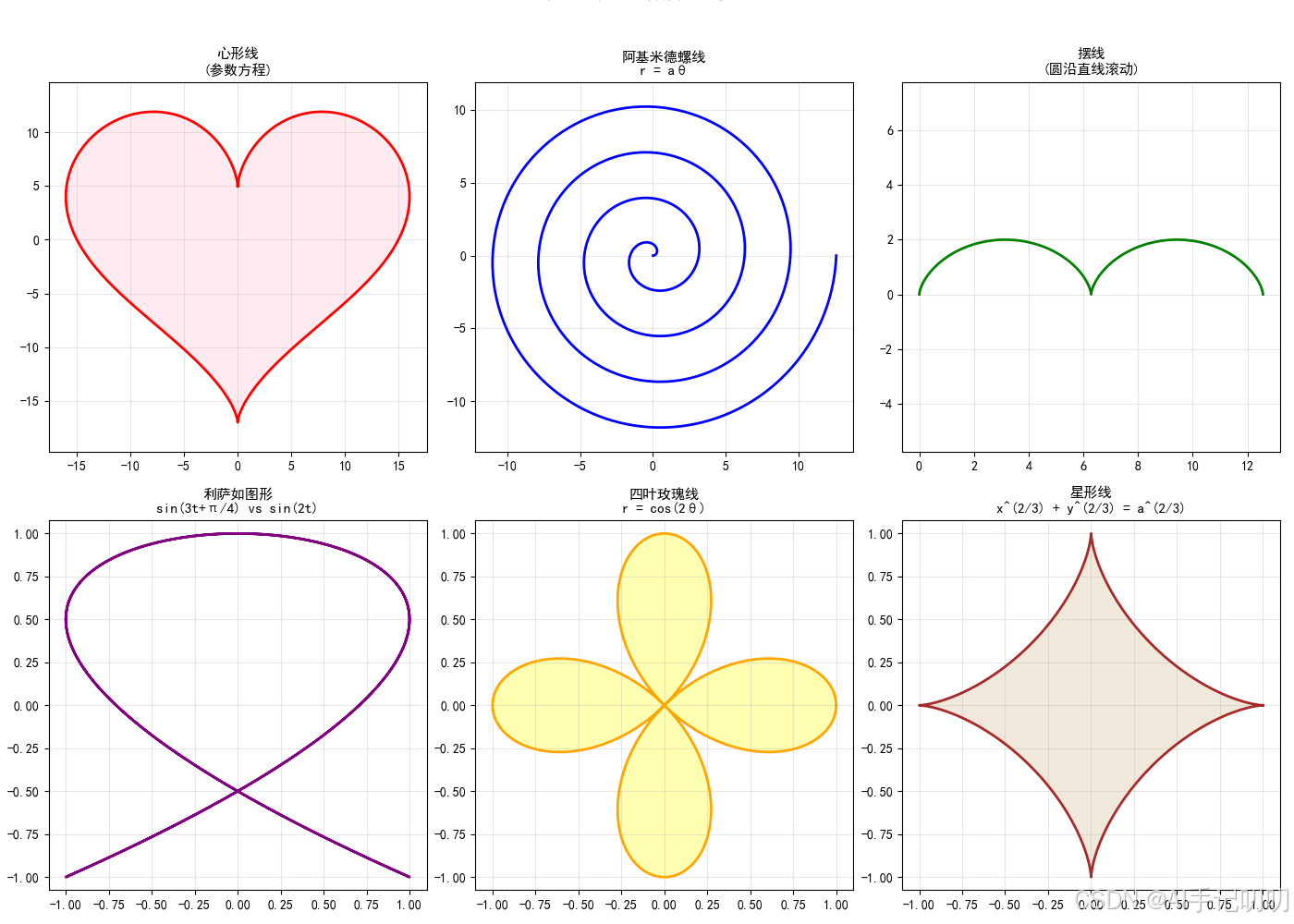
可视化理解 :
基础图形-直线、圆、抛物线:
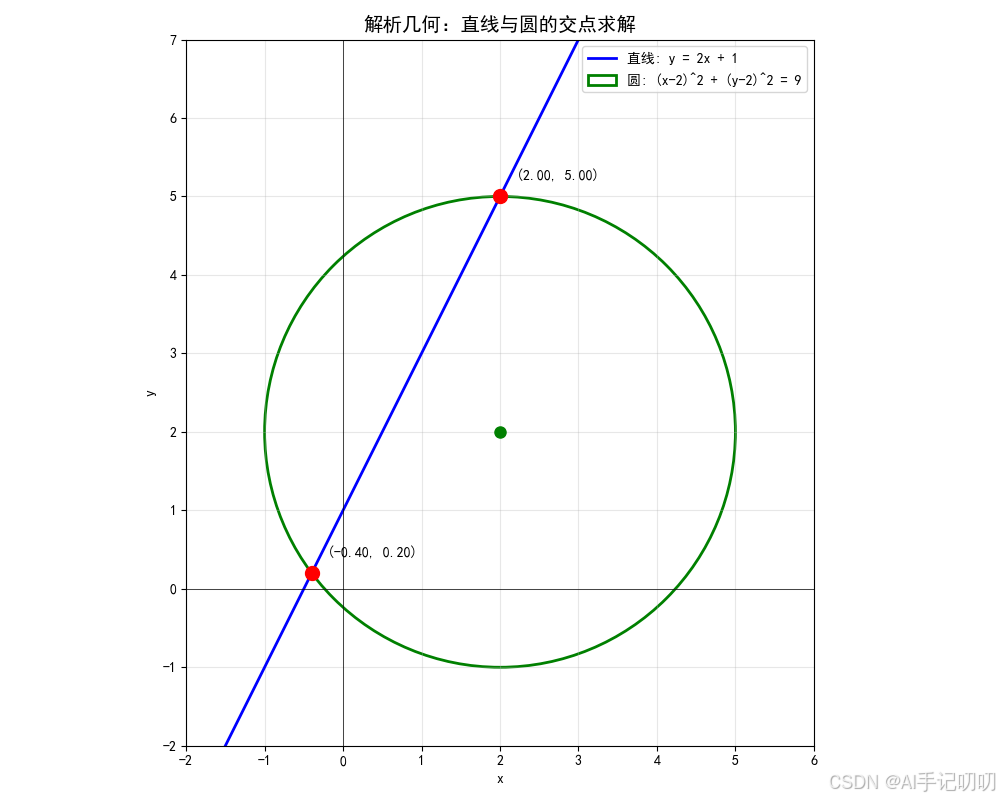
方程求解与交点可视化:
参数方程(复杂曲线):
2. 使用方法
bash
pip install sympy matplotlib使用 SymPy 进行符号几何计算
python
from sympy import Point, Line, Circle, Polygon
# 创建几何对象
A, B, C = Point(0, 0), Point(4, 0), Point(2, 3)
circle = Circle(A, 5)
line = Line(A, B)
# 几何计算
print("交点:", line.intersection(circle))
print("面积:", Polygon(A, B, C).area)
print("距离:", line.distance(Point(1, 1)))参数方程与极坐标
python
import numpy as np
import matplotlib.pyplot as plt
# 设置支持中文
plt.rcParams['font.sans-serif'] = ['SimHei']
# 解决'-'显示问题
plt.rcParams['axes.unicode_minus'] = False
def parametric_equations():
"""参数方程与极坐标示例"""
# 参数方程绘制曲线
t = np.linspace(0, 2 * np.pi, 100)
x = np.cos(t)
y = np.sin(t)
plt.figure(figsize=(10, 4))
plt.subplot(1, 2, 1)
plt.plot(x, y)
plt.title("参数方程: x=cos(t), y=sin(t)")
plt.axis('equal')
plt.grid(True)
# 极坐标绘图
plt.subplot(1, 2, 2, projection='polar')
theta = np.linspace(0, 4 * np.pi, 200)
r = np.sin(3 * theta) # 三叶玫瑰线
plt.polar(theta, r)
plt.title("极坐标: r = sin(3θ)")
plt.tight_layout()
plt.show()
if __name__ == '__main__':
parametric_equations()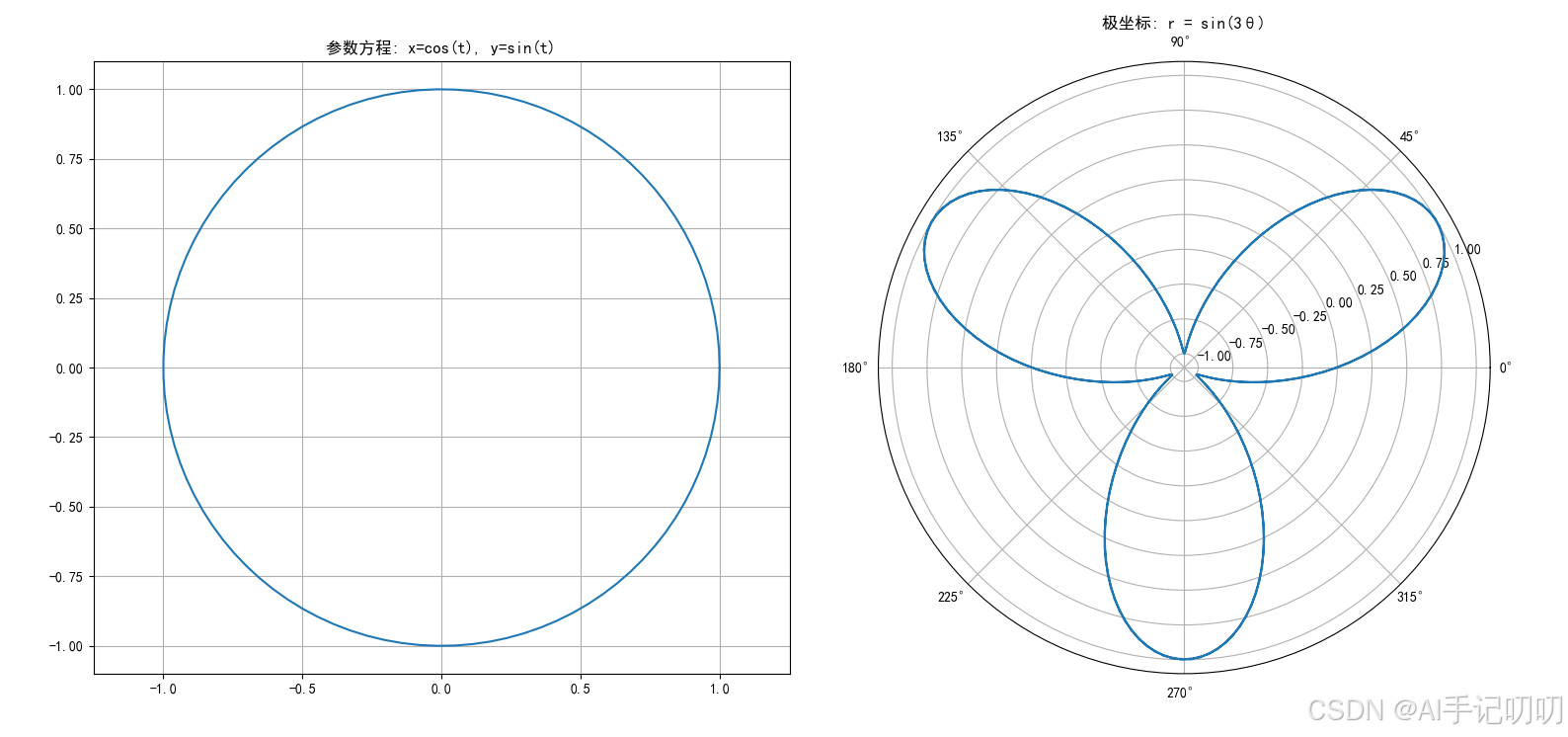
3. 应用场景
轨迹分析与路径规划
python
import numpy as np
def bezier_curve(control_points, n=100):
"""生成贝塞尔曲线(de Casteljau算法)"""
t = np.linspace(0, 1, n)
curve = np.zeros((n, 2))
for i, ti in enumerate(t):
points = control_points.copy()
for r in range(1, len(points)):
points = (1-ti)*points[:-1] + ti*points[1:]
curve[i] = points[0]
return curve
# 使用示例
points = np.array([[0,0], [1,3], [4,4], [6,1], [8,3]])
curve = bezier_curve(points)三、 射影几何运算
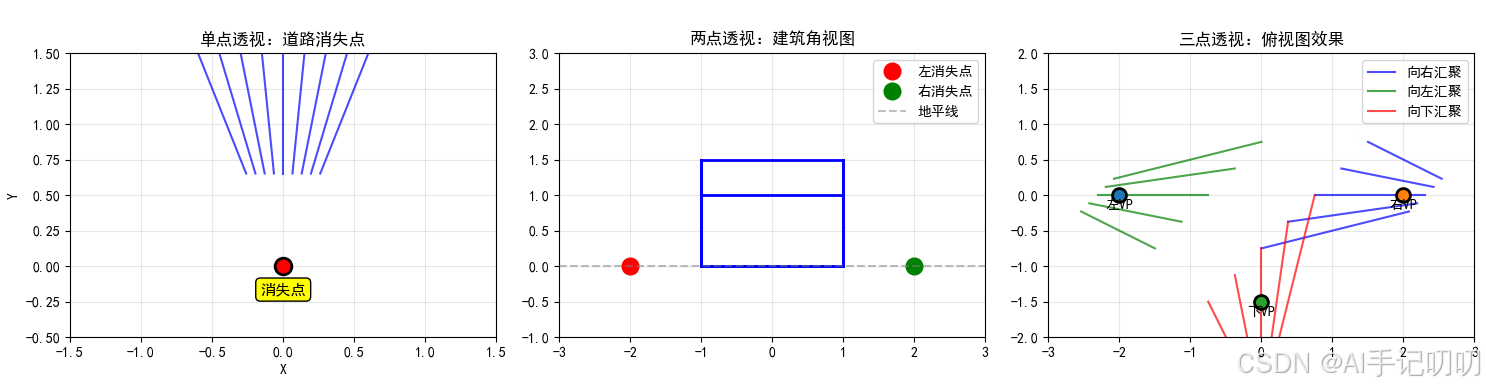
射影几何研究在投影变换下保持不变的几何性质,常用于计算机视觉、三维重建和图像处理中。
射影几何的核心是投影变换下的不变性
1. 基本概念
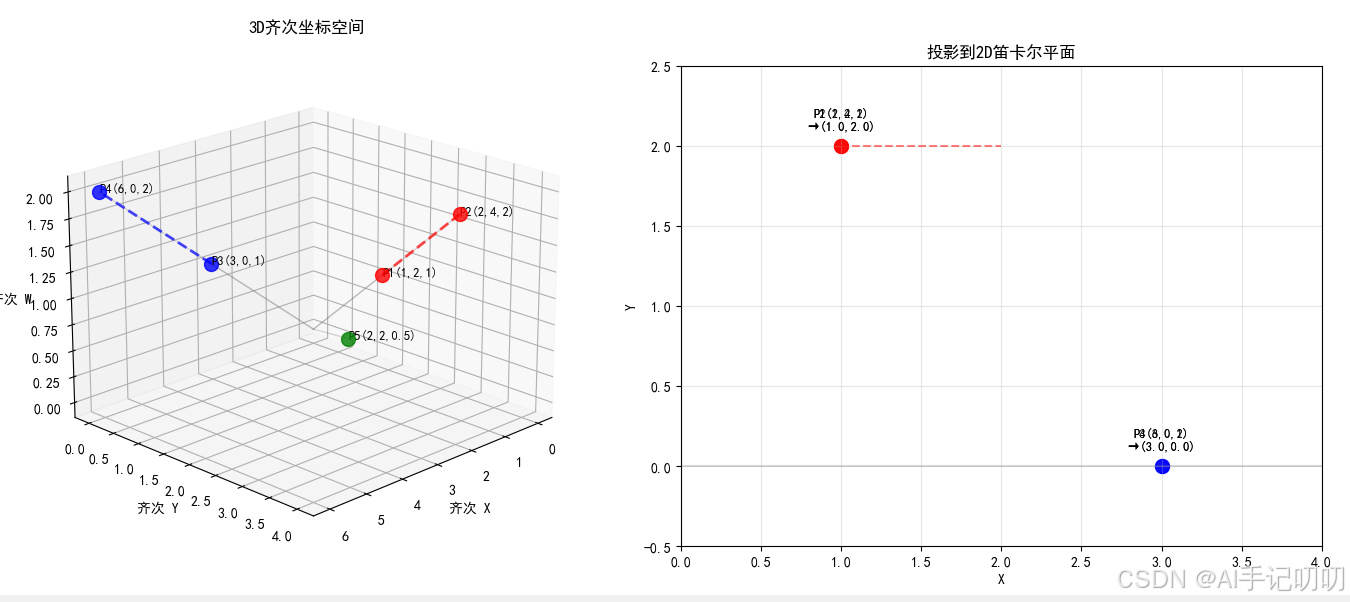
核心概念:投影变换、齐次坐标、交比不变性,如交比不变性
可视化理解 :
透视投影:
齐次坐标:
对偶原理:
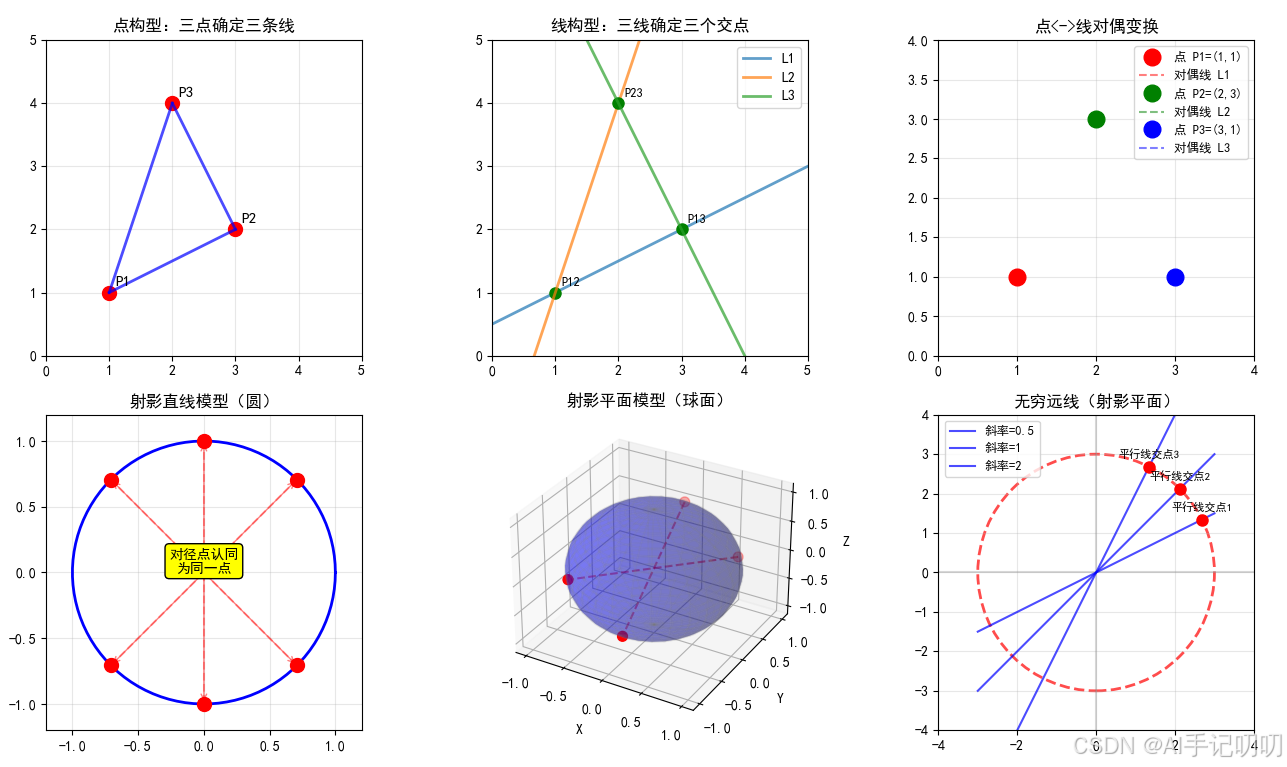
射影变换:
2. 使用方法
bash
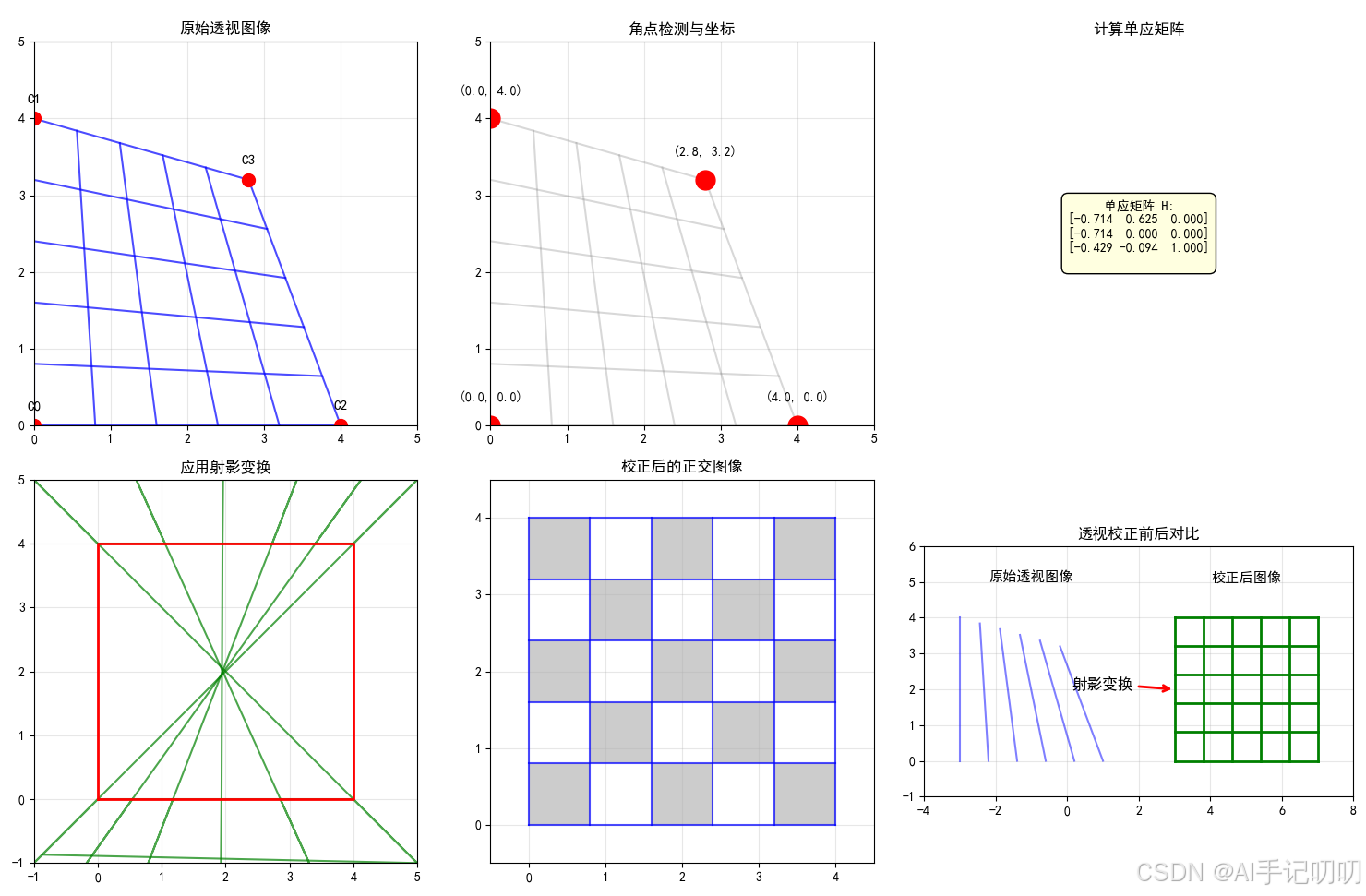
pip install opencv-python使用 OpenCV 进行射影变换
python
import cv2
import numpy as np
def correct_perspective(image, src_corners, target_width, target_height):
dst_corners = np.float32([
[0, 0],
[target_width, 0],
[target_width, target_height],
[0, target_height]
])
M = cv2.getPerspectiveTransform(src_corners, dst_corners)
corrected = cv2.warpPerspective(image, M, (target_width, target_height))
return corrected
if __name__ == '__main__':
# 假设有一张图片
image = np.zeros((300, 300, 3), dtype=np.uint8)
src_corners = np.float32([[50, 50], [250, 50], [200, 250], [80, 200]])
corrected = correct_perspective(image, src_corners, 200, 200)
print("校正后的图片形状:", corrected.shape)四、 微分几何运算
微分几何研究曲线、曲面在微小范围内的性质,如曲率、法向量、切平面等,广泛应用于物理模拟、机器人学和计算机图形学。
微分几何是关于曲线和曲面的局部性质,如曲率、法向量、切平面等。
1. 基本概念
核心概念:曲率、法向量、切平面、测地线
可视化理解 :
平面曲线-曲率与密切圆: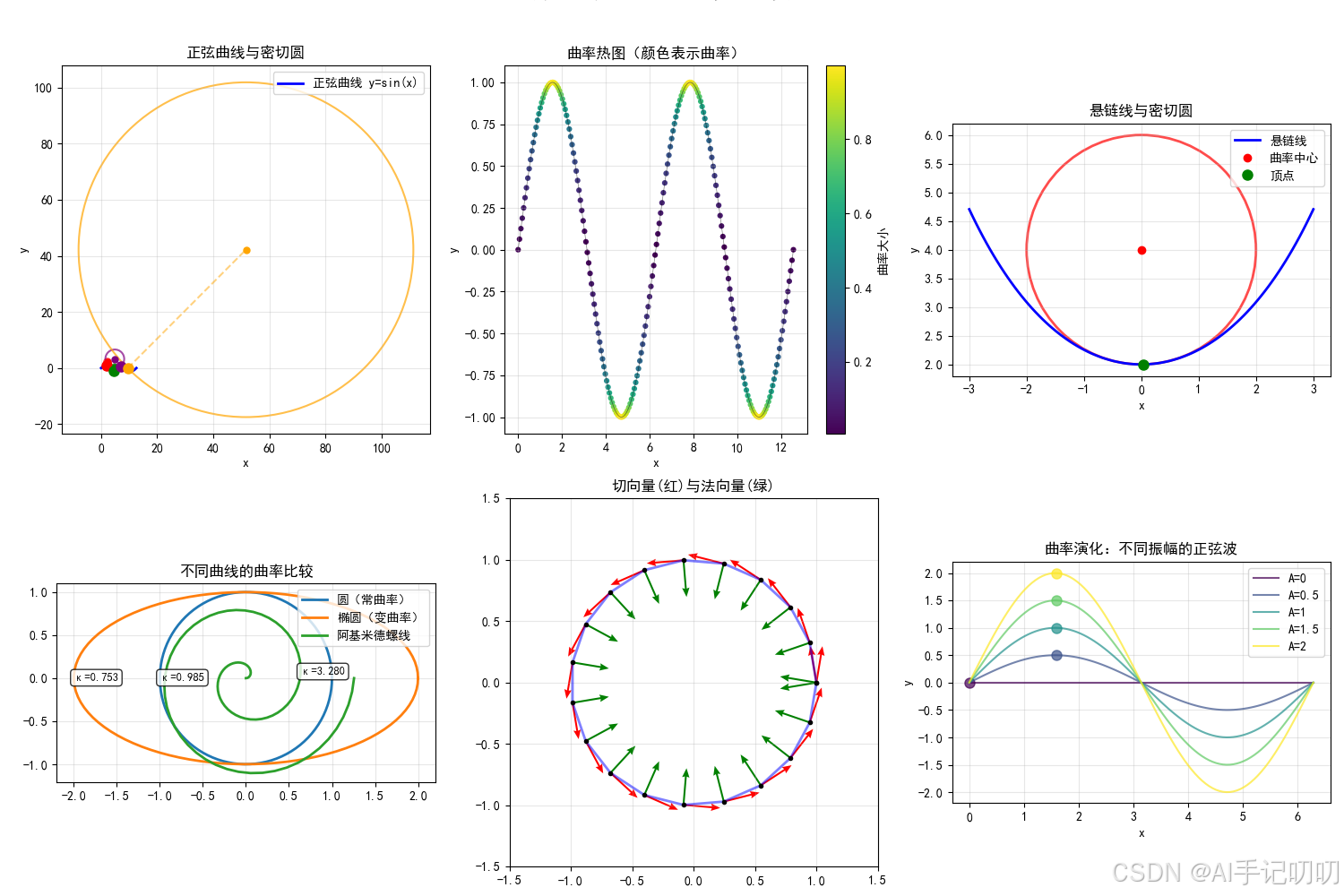
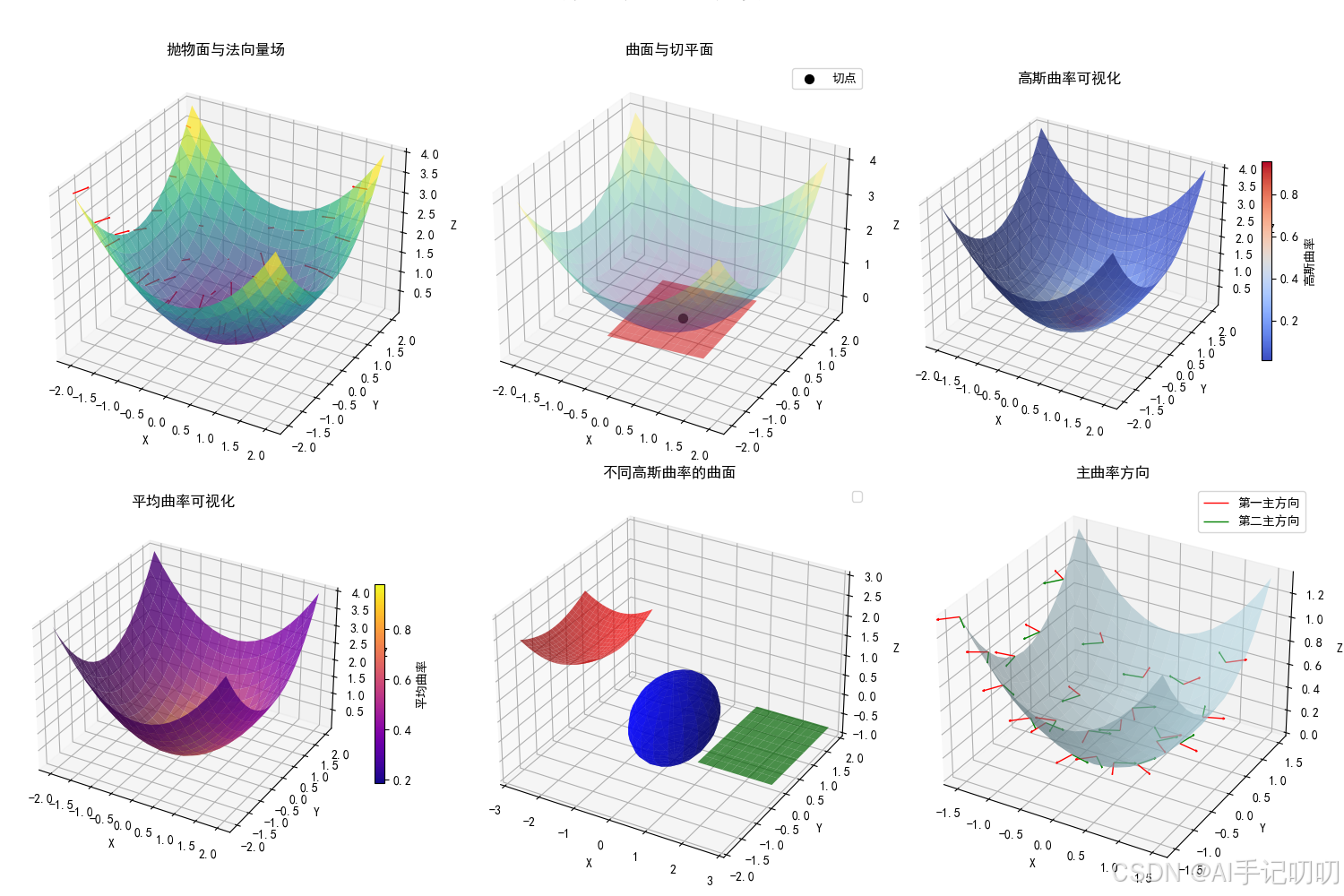
三维曲面:
2. 使用方法
使用 NumPy 计算曲线曲率
python
import numpy as np
def curve_curvature(x, y):
dx = np.gradient(x)
dy = np.gradient(y)
ddx = np.gradient(dx)
ddy = np.gradient(dy)
return np.abs(dx * ddy - dy * ddx) / (dx**2 + dy**2)**1.5
if __name__ == '__main__':
t = np.linspace(0, 2*np.pi, 100)
x = t
y = np.sin(t)
k = curve_curvature(x, y)
print("曲率前5个值:", k[:5])三维曲面法向量计算
python
import numpy as np
def compute_normals(vertices, faces):
"""计算三角网格法向量"""
normals = np.zeros_like(vertices)
for face in faces:
v0, v1, v2 = vertices[face]
normal = np.cross(v1 - v0, v2 - v0)
normals[face] += normal
# 归一化
norms = np.linalg.norm(normals, axis=1, keepdims=True)
return normals / norms五、 总结
| 几何类型 | 主要方法 | 适用场景 |
|---|---|---|
| 欧几里得几何 | math.dist(), math.hypot(), np.dot() | 距离、角度、面积计算 |
| 解析几何 | SymPy (Point, Line, Circle) | 符号计算、方程求解 |
| 射影几何 | cv2.getPerspectiveTransform() | 图像校正、三维重建 |
| 微分几何 | np.gradient(), np.cross() | 曲率、法向量计算 |
简单计算用 math/NumPy,符号计算用 SymPy,图像处理用 OpenCV,数值计算用 SciPy。
六、 相关文章
Python数学:幂运算与根式运算
Python数学:函数运算
Python数学:统计运算
鼓起勇气求关注......(悄悄点一下就好,谢谢你💐)