本文给出当前前沿研究的课题推荐,基于大量的数据整合、识别、归纳和一些个人的想法。试图在导航、定位的方向研究中提供有价值的研究问题,为项目选题奠定基础。个人观点,仅供参考,也欢迎大家共同讨论。
文章目录
背景介绍
飞行目标的轨迹定位是导航、制导与控制领域中的重要研究内容。在动态环境中,目标轨迹的识别与定位不仅依赖于目标的观测数据,还涉及到不确定性分析和优化算法的应用。为了提高目标轨迹定位的精度与鲁棒性,本文提出基于累计概率方法的轨迹匹配方法,通过对飞行目标的多条可能轨迹进行匹配,从而准确识别真实轨迹。
课题目标
- 研究目标轨迹匹配:通过对多个可能轨迹的累积概率计算,设计出合适的匹配算法。
- 优化定位精度:运用累计概率方法结合目标状态信息,进行精确定位。
- MATLAB实现:通过仿真环境下的飞行目标轨迹数据,展示算法的实现效果及定位性能。
方法描述
-
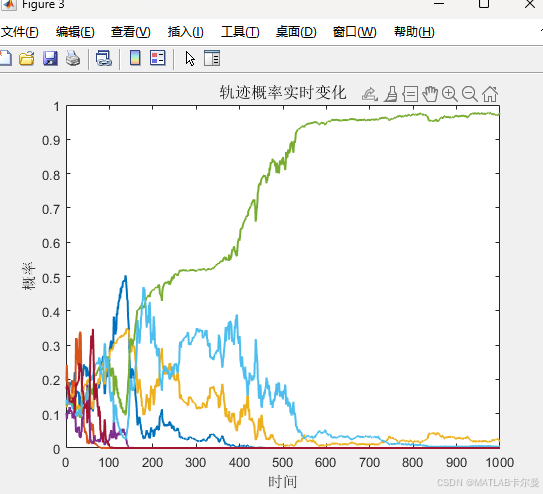
累计概率方法:该方法通过对所有可能轨迹的累计概率进行计算,并选择最优的匹配轨迹来进行定位。每条轨迹都会根据当前观测量(如速度、位置、加速度等)进行概率更新,从而提供对目标最可能的轨迹。
-
轨迹匹配算法:
- 设定目标轨迹的初始位置和速度。
- 基于测量误差和模型误差,计算每条轨迹的累计概率。
- 选择累计概率最高的轨迹作为目标的真实轨迹。
-
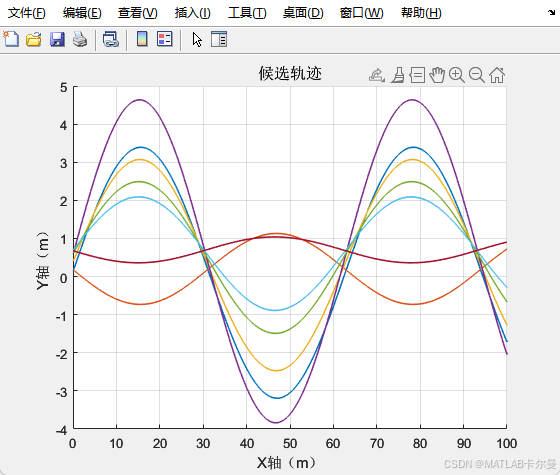
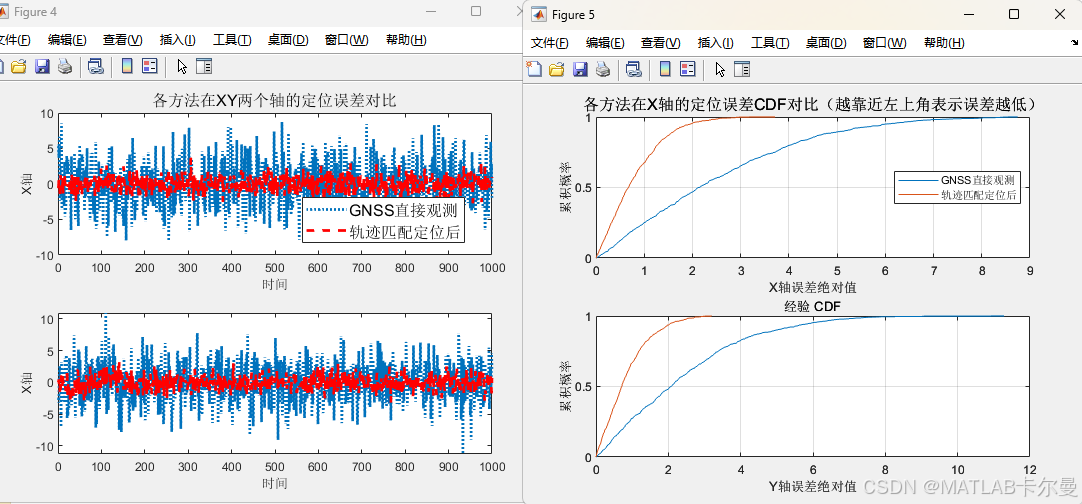
仿真与评估:通过MATLAB进行仿真,展示飞行目标的多条轨迹,并对比基于累计概率方法与传统方法(如最小均方误差)的定位效果。
MATLAB结果演示
代码说明
- 模拟目标轨迹 :函数
simulate_trajectory模拟了一个简单的飞行目标轨迹,假设目标沿直线匀速运动。 - 加入噪声 :函数
add_noise为目标轨迹添加高斯噪声,模拟真实环境中的观测误差。 - 计算累计概率 :函数
compute_probability通过计算观测轨迹与模拟轨迹之间的误差平方和来估计累计概率,并根据这个概率选择最匹配的轨迹。 - 仿真与可视化:仿真过程中,展示了真实轨迹、带噪声的轨迹和基于累计概率方法选择的最佳匹配轨迹。
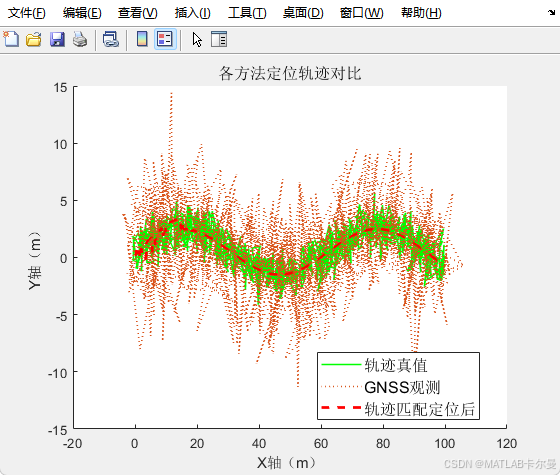
仿真效果
- 真实轨迹:黑色线条,表示目标的实际轨迹。
- 噪声轨迹:红色虚线,表示带有噪声的轨迹。
- 最优匹配轨迹:蓝色点线,表示基于累计概率方法选择的最匹配轨迹。
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者