无人机定位中常用的滤波器主要有以下几种,它们在状态估计和传感器融合中发挥关键作用:
1. 卡尔曼滤波器(KF)
线性系统的标准滤波器
适用于状态空间模型为线性的系统
包含预测和更新两个步骤
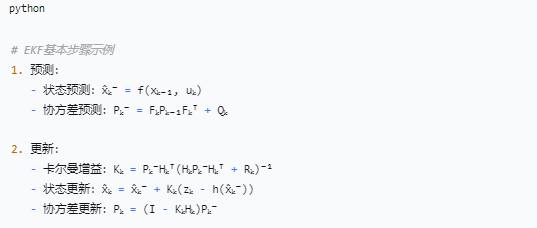
2. 扩展卡尔曼滤波器(EKF)
最常用的无人机定位滤波器
通过一阶泰勒展开处理非线性系统
典型应用:
GPS/IMU融合定位
视觉惯性里程计(VIO)
状态估计(位置、速度、姿态)
3. 无迹卡尔曼滤波器(UKF)
使用无迹变换(Unscented Transform)处理非线性
比EKF更精确,尤其对于强非线性系统
无需计算雅可比矩阵
4. 误差状态卡尔曼滤波器(ESKF)
在误差状态而非完整状态上运行
优点:
更好的数值稳定性
更符合IMU的误差特性
旋转处理更优雅
广泛用于MSCKF、VINS-Mono等VIO算法
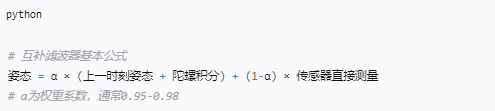
5. 互补滤波器
简单高效的姿态估计方法
结合高频IMU和低频磁力计/GPS数据
6. 粒子滤波器(PF)
基于蒙特卡罗方法
适合高度非线性、非高斯系统
计算量大,实时性较差
7. 因子图优化
虽然不是传统滤波器,但在现代定位中广泛使用
优点:
能够优化历史状态
更好地处理闭环检测
适合SLAM应用
实际应用中的选择
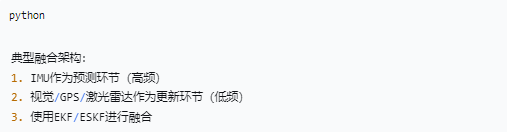
GPS/IMU融合
EKF/ESKF最常用
GPS提供绝对位置,IMU提供高频相对运动
视觉惯性里程计(VIO)
ESKF或基于优化的方法
如MSCKF、OKVIS、VINS-Mono
纯视觉定位
直接法:LK光流 + 滤波器
特征法:特征匹配 + 优化
多传感器融合
滤波器设计要点
1. 状态向量选择:
位置、速度、姿态(6-16维)
IMU零偏等参数
2. 传感器模型:
IMU:加速度计+陀螺仪模型
GPS:位置+速度测量模型
视觉:重投影误差模型
3. 时间同步:
不同传感器时间戳对齐
IMU预积分技术
4. 外参标定:
传感器间坐标变换
在线或离线标定
