最近,特斯拉在北美高速公路上的全自动驾驶技术引起全球关注,从美国西海岸开到东海岸,2天20小时,人类0次接管。物理世界的「自动驾驶奇点」,终于降临!这条推特,也彻底引爆了全球科技圈和AI圈。其感知系统在高速公路和城市道路上已表现出令人印象深刻的性能。然而,在这片技术的背后,一个被忽视的挑战逐渐浮现:如何让自动驾驶在偏远乡村道路上同样安全可靠?
在乡村道路上,自动驾驶系统面临的挑战远非城市可比。野生动物突然横穿道路、道路标志不清、天气条件多变等复杂场景,都要求感知系统具备更强大的适应性和精度。
《SCCA-YOLO: A Spatial and Channel Collaborative Attention Enhanced YOLO Network for Highway Autonomous Driving Perception System》这篇文章提出了一种专门针对乡村道路场景设计的空间-通道协同注意力YOLO网络。该网络集成了一种创新的注意力机制,以顺序方式融合具有共享语义的空间注意力和通道自注意力,从而提升YOLOv8的精度。此外,还集成了Ghost模块以实现网络的轻量化特性。在自有数据集和公开数据集上进行的评估,验证了该检测网络性能的有效性。
论文链接:www.nature.com/articles/s4...
乡村道路的独特挑战
乡村道路是自动驾驶技术最后的"前沿阵地"之一。与城市道路相比,乡村环境具有三个显著特点:
- 不可预测的道路使用者: 在偏远地区,大型动物如鹿、牛、马等可能随时出现在道路上。这些动物的行为模式难以预测,而一旦发生碰撞,后果往往比城市中与车辆碰撞更为严重。
- 复杂的道路条件: 许多乡村道路缺乏清晰的车道标记,路面状况多变,可能包含未铺设的路段、狭窄的桥梁和急转弯。
- 有限的基础设施: 乡村地区通常缺乏高质量的数字地图和稳定的网络连接,这意味着自动驾驶系统必须更加依赖自身传感器和本地处理能力。
当前主流的自动驾驶感知系统大多针对城市环境优化,当面对乡村道路的独特挑战时,往往表现出检测精度下降、误报率上升等问题。
数据集建设:填补空白的第一步
要训练一个能在乡村道路上表现优异的感知系统,首先需要专门的数据集。然而,学术界和工业界长期缺乏专门针对乡村和偏远高速公路场景的高质量数据集。
本研究团队花费大量时间,构建了一个包含1050张图像的数据集,这些图像被分为六个类别,涵盖了四种大型动物、行人以及各类车辆。所有图像均采集自真实的偏远高速公路环境,反映了该场景下的典型特征和挑战。
据我们所知,这是首个专门针对偏远高速公路驾驶条件定制的多类别数据集,为相关研究提供了宝贵的资源基础。数据集的多样性和真实性使模型能够学习到乡村道路上特有的视觉特征和场景模式。
SCCA-YOLO:专为复杂场景设计的感知网络
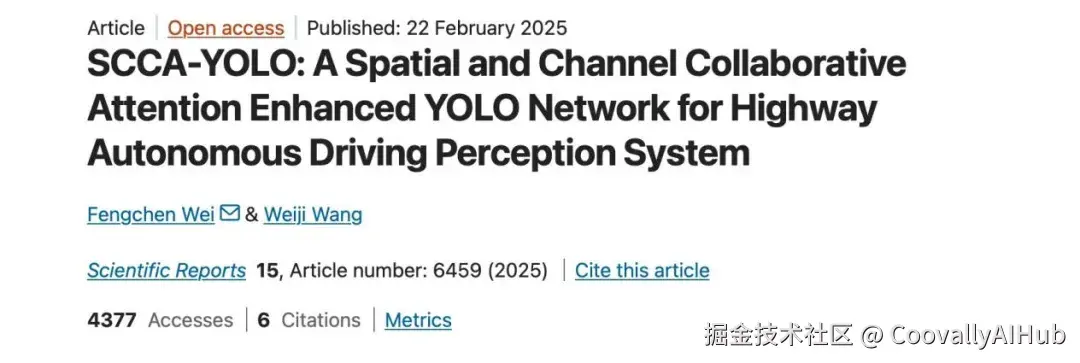
基于对乡村道路场景的深入分析,研究团队提出了一种专门针对这类环境优化的空间-通道协同注意力YOLO网络,简称SCCA-YOLO。这一网络在保持YOLOv8高效架构的同时,通过引入创新的注意力机制,显著提升了检测精度。
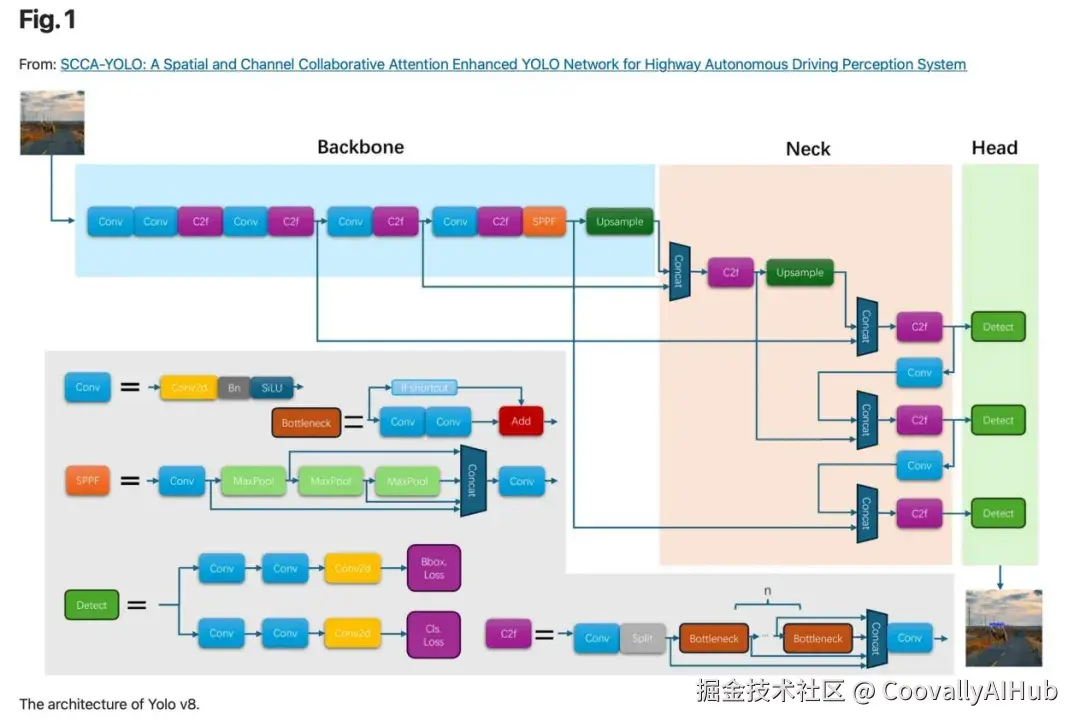
SCCA模块的核心设计: 传统注意力机制通常单独考虑空间或通道维度,而SCCA模块通过顺序方式融合具有共享语义的空间注意力和通道自注意力。
这种协同工作方式使网络能够更好地理解特征图中不同区域和通道之间的复杂关系,从而更准确地识别乡村道路上的各类目标,特别是那些在复杂背景下难以检测的对象。
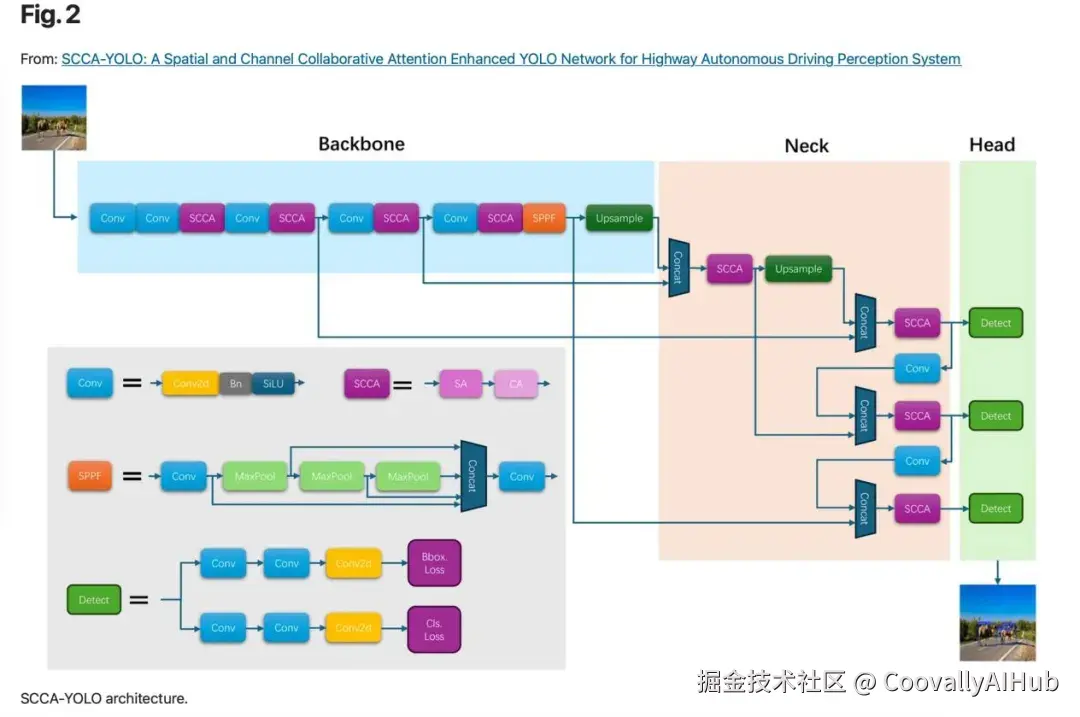
SCCA-YOLO受Yunzhong等人于2024年提出的注意力机制的启发,该机制研究了空间注意力与通道注意力之间的相互作用。尽管以往的研究已经探讨了空间注意力和通道注意力在提取特征依赖关系以及理解空间结构关系方面的各自作用,但缺乏对它们联合效应的综合性研究。SCCA模块由两个部分组成:共享多语义空间注意力(SA)和渐进式通道自注意力(CA)。共享多语义方面整合了不同空间维度上的多种语义信息,这些信息随后被通道自注意力机制利用。这种语义信息的整合能够有效指导通道校准,从而提升网络的整体性能。网络的整体架构如图3所示,其中X为特征图。
轻量化设计: 考虑到乡村地区可能面临的硬件限制,研究团队还将Ghost模块集成到网络中。
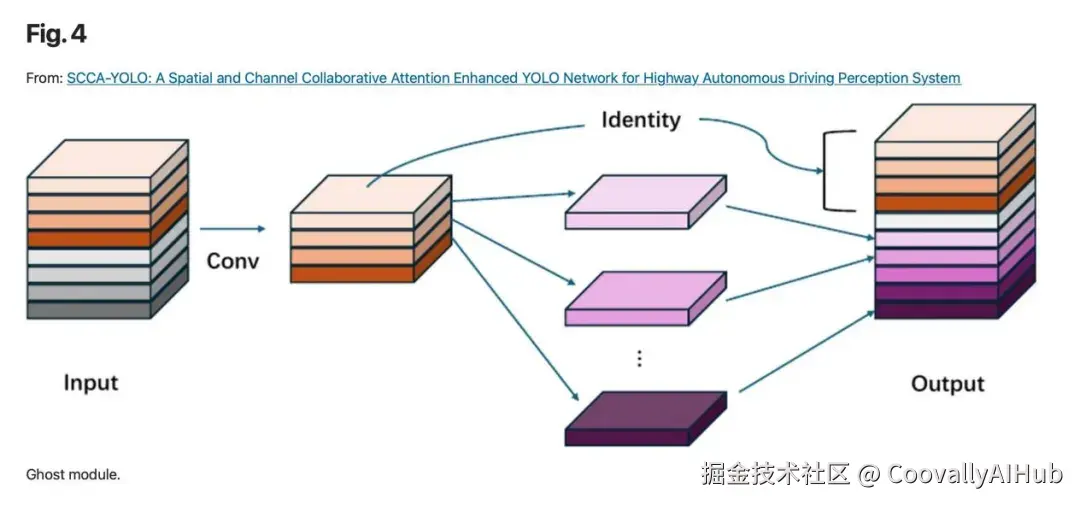
这种设计通过简单的线性运算生成"影子"特征图,减少了模型的计算需求和参数数量,使网络在保持高精度的同时更加轻量化,更适合在边缘设备上部署。
实验验证:多数据集上的卓越表现
为了全面评估SCCA-YOLO的性能,研究团队在三个数据集上进行了对比实验:自建的乡村道路数据集、公开的African-Wildlife数据集以及COCO128数据集。
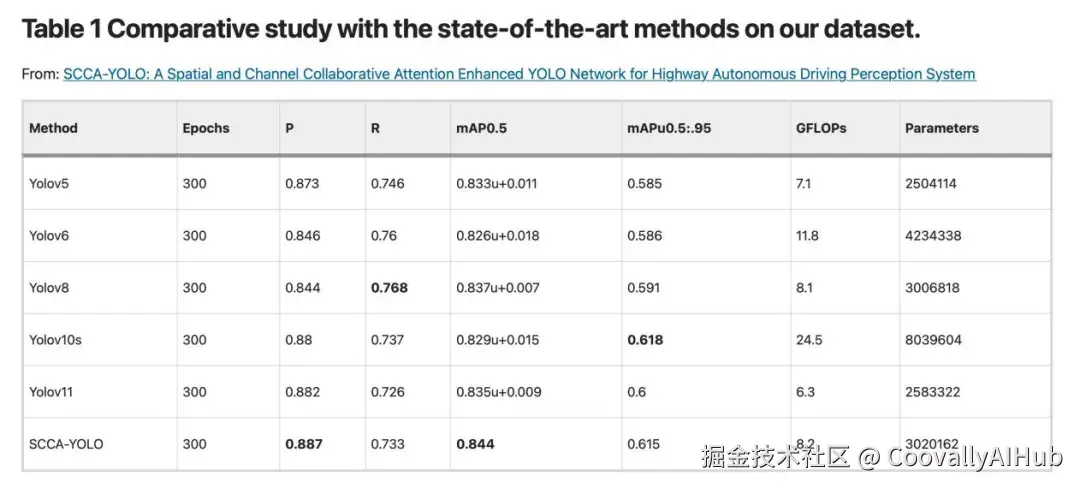
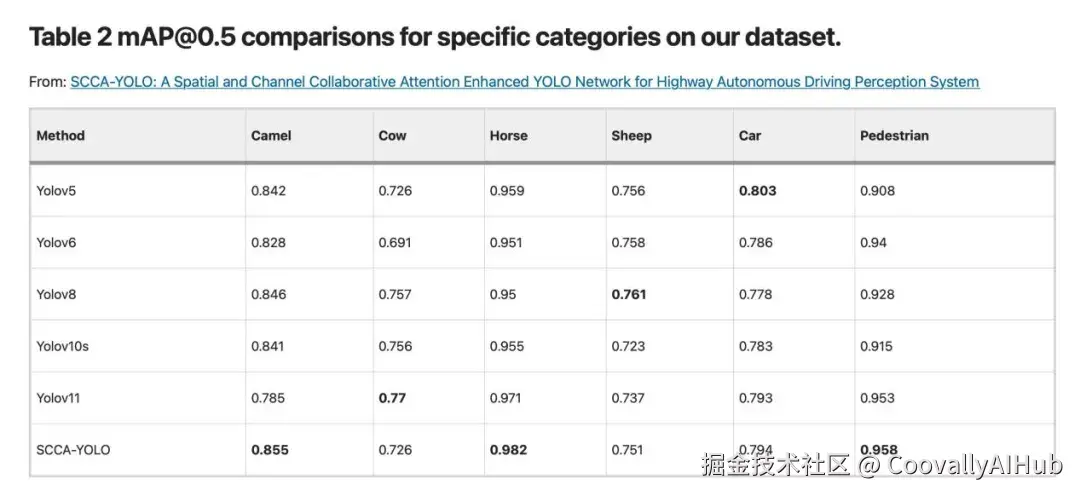
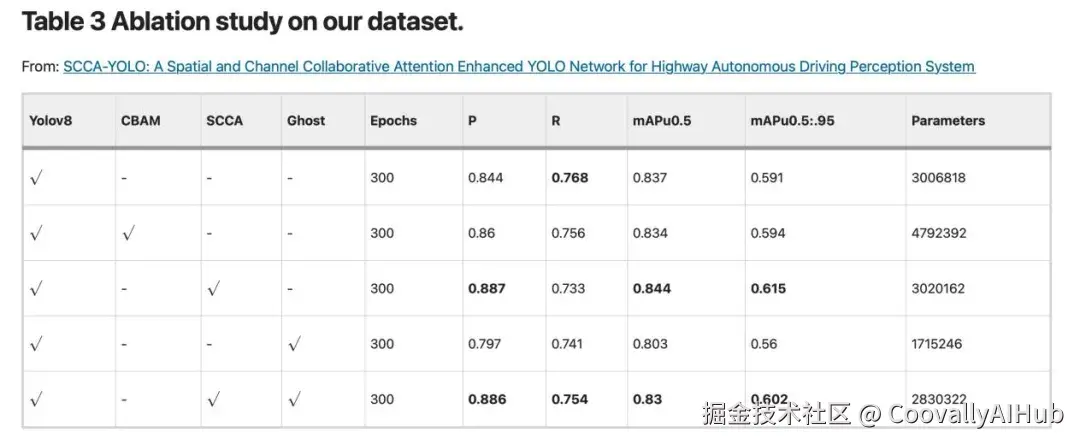
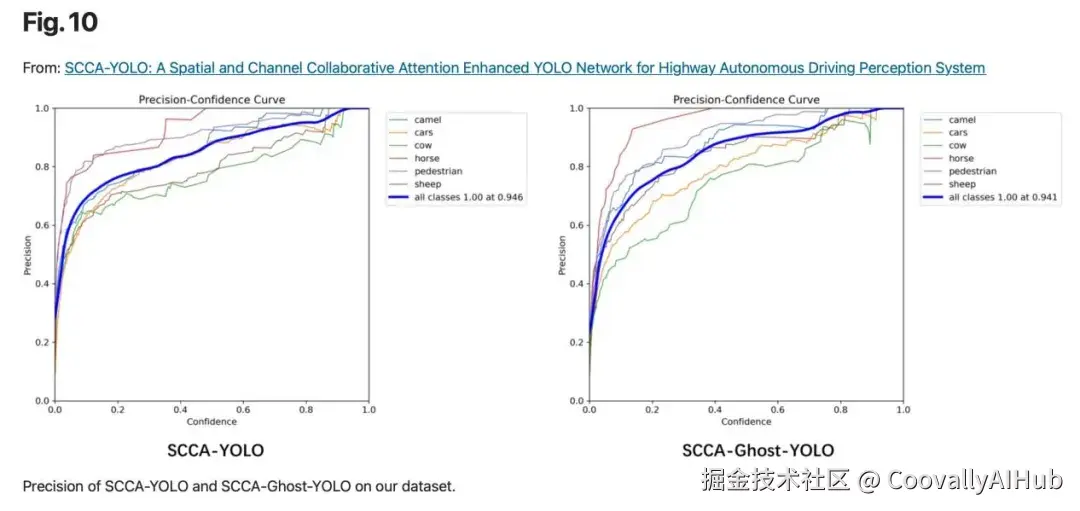
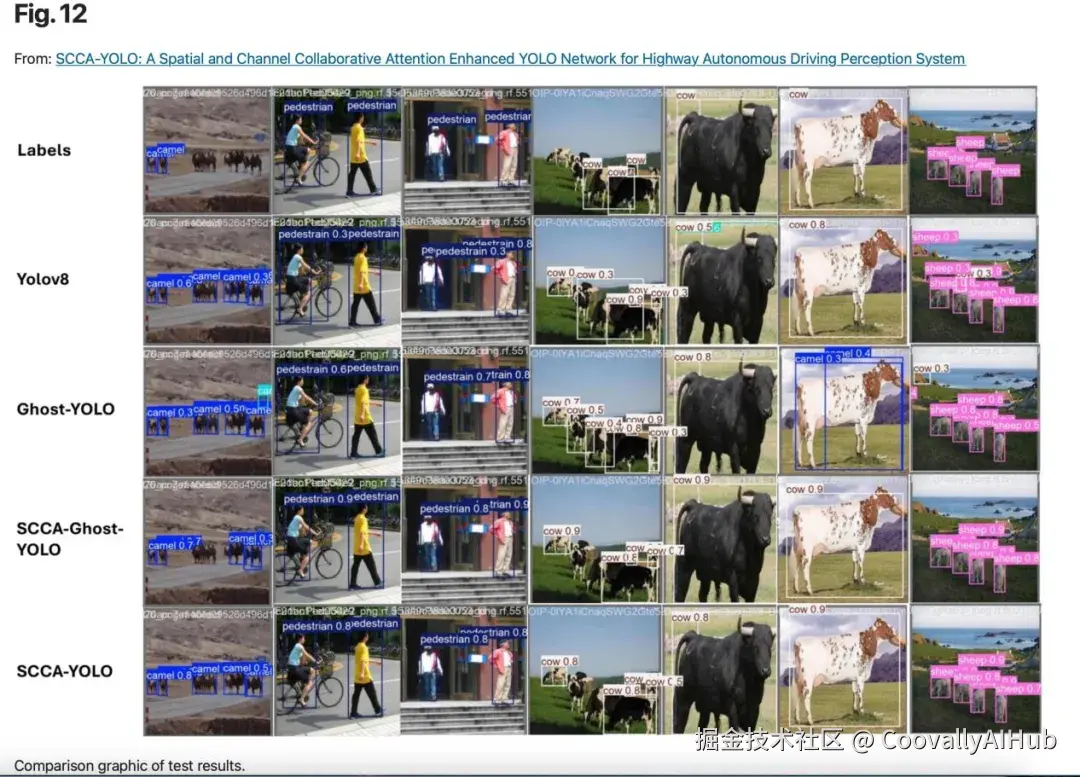
在自有数据集上: SCCA-YOLO相比传统YOLOv8在平均精度均值上提升了1.6%,比采用卷积块注意力模块的YOLOv8变体高出0.7%。特别值得注意的是,在检测大型动物等乡村道路特有目标时,性能提升更为明显。
在公开数据集上: 即使在非专门针对乡村道路的数据集上,SCCA-YOLO也表现出了优秀的泛化能力。在African-Wildlife数据集上,网络展现了对各种野生动物出色的识别能力;在COCO128数据集上的表现也优于其他对比方法。
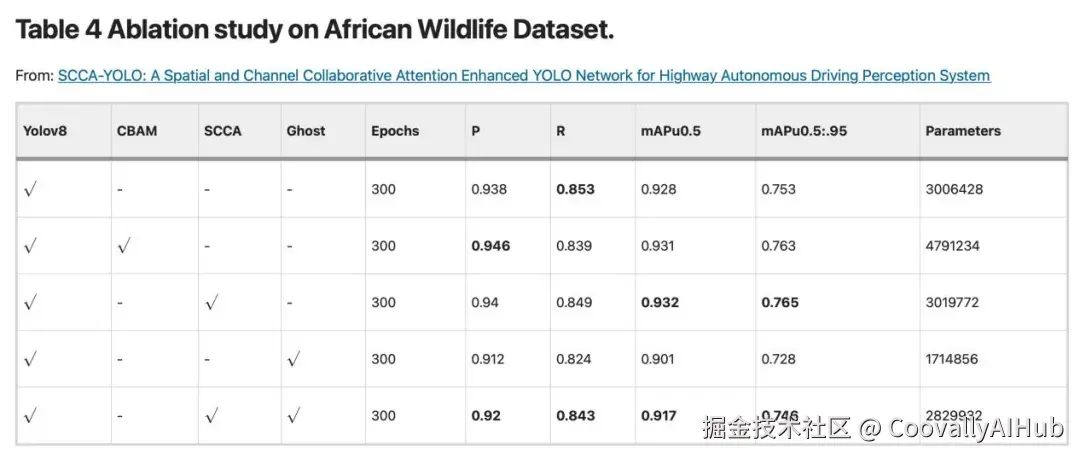
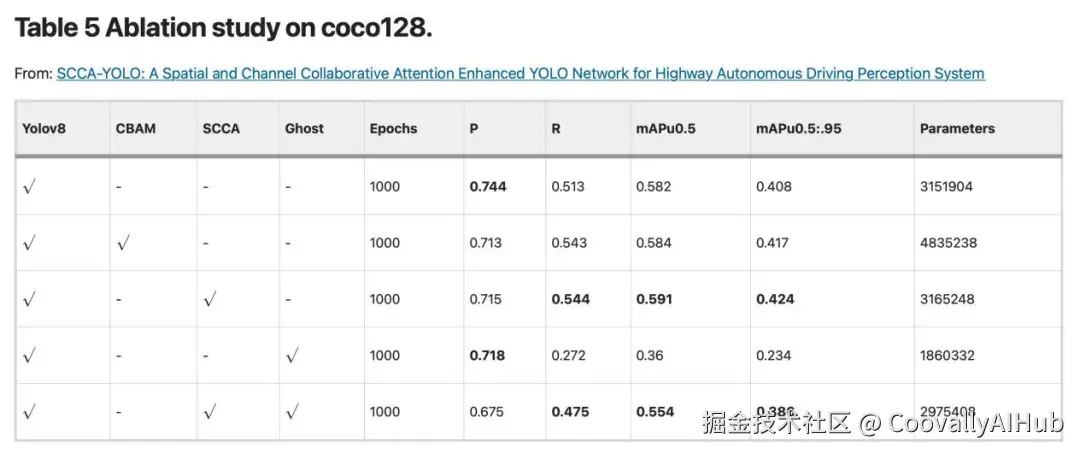
轻量化效果: 集成了Ghost模块的SCCA-Ghost-YOLO在参数数量大幅减少的情况下,仅损失了微小的精度,验证了轻量化设计的有效性。
技术实现细节
SCCA-YOLO基于YOLOv8架构开发,主要改进点包括:
- SCCA模块: 该模块首先通过共享多语义空间注意力提取不同空间维度上的多种语义信息,然后利用渐进式通道自注意力机制校准通道响应。这种设计使网络能够同时关注"哪里重要"和"什么重要",从而更全面地理解复杂场景。
- Ghost模块集成: 在保证精度的前提下,通过Ghost模块替换部分传统卷积层,显著降低了计算成本和内存占用。这一改进使模型更适合部署在计算资源有限的边缘设备上。
- 多尺度特征融合: 结合了YOLO系列传统的多尺度特征金字塔结构,使网络能够同时检测不同尺寸的目标,这对于乡村道路上可能出现的大型动物和远处的小型标志都至关重要。

实际应用前景
SCCA-YOLO的研究成果为自动驾驶在乡村道路上的应用提供了新的技术路径。其潜在应用包括:
- 偏远地区的自动驾驶车辆: 为在乡村地区运营的自动驾驶出租车、货运车辆提供更可靠的感知能力。
- 农业自动化: 可用于农田监测、自动驾驶农机等场景,提高农业生产效率。
- 野生动物保护: 通过安装在道路旁的智能监控系统,实时检测可能进入道路的野生动物,提前预警司机,减少车辆与野生动物的碰撞事故。
- 基础设施建设: 辅助道路巡检和维护工作,自动检测道路损坏、标志缺失等问题。
结语
传统的计算机视觉目标检测算法正随着全球自动驾驶研究热潮和模型架构的不断优化而加速迭代。特斯拉的全自动驾驶系统展示了城市和高速公路场景下的技术潜力,但在广阔的乡村道路上,真正的挑战才刚刚开始。
随着技术的不断成熟,那些曾经被认为难以实现自动驾驶的偏远道路,正逐渐向智能交通系统敞开大门。