【深度学习Day4】告别暴力拉平!MATLAB老鸟带你拆解CNN核心:卷积与池化 (附高频面试考点)
摘要 :刚用 MLP 啃下了 MNIST,但那种把精美的 28×28 图片暴力 Flatten 成一条线的操作,总让我觉得像是在"暴殄天物"------像素原本的空间邻域信息全丢了!今天,作为一名 MATLAB 老鸟,我要用大家熟悉的图像处理视角,拆解 PyTorch 的核武器------torch.nn.Conv2d(卷积层)与 torch.nn.MaxPool2d(池化层)。本文不整虚的,从 MATLAB 卷积操作类比到 PyTorch 实战,既有参数详解、原理可视化逻辑,还有面试必背的维度计算公式,甚至加了卷积核可视化、特征图查看的硬核实操;搞懂这些,下一篇 CIFAR-10 实战才能真正"知其然也知其所以然"!
关键词:PyTorch, CNN, 卷积, 池化, 特征提取, 感受野, 维度计算, 面试题
1. 为什么要抛弃 MLP?(From Flatten to Feature)
在上一篇(Day3)中,我们用全连接网络(MLP)训练了 MNIST,准确率勉强到 97%+,但只要稍微把图片放大一点,MLP 就会立刻"露怯"------核心问题就两个,咱们用 MATLAB 老鸟能懂的"数字"说话:
1.1 空间结构丢失:从"看图"变成"看一串数字"
MLP 第一步就是 x.view(-1, 784),把 28×28 的图片拉成 784 维的一维向量。这就像把一张拼图拆成碎片后打乱,只看碎片的颜色,却不管碎片的位置:
- 在 MLP 眼里,像素点 (0,0)(左上角)和 (0,1)(右邻像素)只是长向量里的第 0 个和第 1 个数,它完全不知道这两个点在原图上是"紧挨着的邻居";
- 而人眼看图是"局部感知":先看到数字 "8" 的上半圈,再看到下半圈,最后组合成 "8" 的形状------这正是 CNN 的核心逻辑:局部连接。
1.2 参数量爆炸:MLP 根本扛不住大图片
咱们算一笔账:
- MNIST 是 28×28 灰度图,MLP 输入层 784 个节点,若隐藏层 512 个节点,第一层权重参数 = 784×512 = 401,408 个;
- 换成 224×224 的 RGB 彩图(比如手机拍的照片),MLP 输入层 = 224×224×3 = 150,528 个 节点,若隐藏层 1000 个节点,第一层权重 = 150,528×1000 = 1.5 亿个参数!
别说训练了,光把这些参数存到内存里,普通显卡都扛不住。
1.3 CNN 的破局思路:局部连接 + 权值共享
CNN 解决这两个问题靠的是 "两大法宝" :
- 局部连接:每个卷积核只看图片的一小块(比如 3×3),而非全图,参数量直接砍半;
- 权值共享:同一个卷积核扫遍整张图(比如用 "边缘检测核" 扫全图找边缘),而非每个像素都配一套权重,参数量再砍 N 倍。
用 MATLAB 类比:这就像你用 Sobel 算子(一个 3×3 的卷积核)处理整张图片时,不会给图片每个位置都做一个专属 Sobel 核,而是用同一个核扫完全图------CNN 只是把 "固定的 Sobel 核" 换成了 "能自己学的核" 而已。
2. 核心武器一:卷积层 (Convolution)
卷积层是 CNN 的 "特征提取器",也是面试问得最多的模块。咱们从 MATLAB 老鸟熟悉的视角,一步步拆透它。附上Convolution | NVIDIA Developer直观的图:
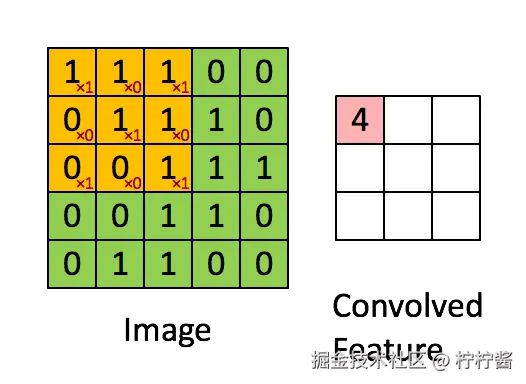
2.1 MATLAB 视角的 "卷积" vs 深度学习的 "卷积"
先回顾 MATLAB 里的图像卷积操作------这是咱们的 "舒适区",从这里切入,CNN 卷积就一点都不抽象了:
matlab
% MATLAB 经典操作:用 Sobel 算子做边缘检测
img = imread('mnist_sample.png'); % 读入 28×28 灰度图
img_gray = rgb2gray(img); % 转灰度
H = fspecial('sobel'); % 定义 Sobel 卷积核(3×3,固定值)
result = imfilter(img_gray, H); % 用固定核 "卷" 图片
imshow(result); % 看到边缘特征MATLAB 里的卷积:卷积核是人工定义的(比如 Sobel、高斯、拉普拉斯),目的是提取预设的特征(边缘、模糊、锐化) 。
而 PyTorch 里的 nn.Conv2d:卷积核是随机初始化的,然后通过反向传播"学"出来的------网络自己决定该学一个 "边缘检测核",还是 "拐角检测核",甚至 "数字笔画检测核"。
举个直观的例子:
- 普通卷积:你告诉电脑 "用 Sobel 找边缘";
- CNN 卷积:电脑自己试错,最后发现 "用这个核找边缘,模型准确率最高",于是把这个核的参数记下来。
这就是 CNN "特征提取"的本质:把人工设计特征(MATLAB 卷积)换成了自动学习特征(PyTorch 卷积) 。
2.2 PyTorch 中 nn.Conv2d 参数大拆解(面试必考)
nn.Conv2d 的参数是新手最容易晕的地方,咱们逐个击破,每个参数都配"MATLAB 类比 + 实战效果":
python
import torch.nn as nn
# 核心定义:Conv2d 基础用法
conv_layer = nn.Conv2d(
in_channels=3, # 输入通道数
out_channels=16, # 输出通道数(卷积核数量)
kernel_size=3, # 卷积核大小
stride=1, # 步长
padding=1, # 填充
dilation=1, # 膨胀率(新手先忽略,面试偶尔问)
groups=1, # 分组卷积(新手先忽略)
bias=True # 是否加偏置(默认True)
)① in_channels & out_channels:通道数的 "厚度魔法"
这是 CNN 最抽象的概念,用 "图片厚度" 类比:
-
in_channels(输入通道数) :输入图片有多 "厚" ?
- 灰度图(MNIST):厚度=1 →
in_channels=1; - RGB 彩图(CIFAR-10):厚度=3(红、绿、蓝各一层)→
in_channels=3; - 卷积层输出的特征图:比如上一层输出 16 通道 → 这一层
in_channels=16。
- 灰度图(MNIST):厚度=1 →
✅ MATLAB 类比:就像 MATLAB 里处理多通道图像(cat(3, R, G, B)),每个通道是独立的图层。
-
out_channels(输出通道数) :你想用多少个"不同的滤镜"观察图片?
- 设置
out_channels=16→ 网络会同时训练 16 个不同的卷积核; - 每个卷积核扫一遍输入图片,输出一张 "特征图";
- 最终输出 = 16 张特征图叠在一起(厚度 = 16)。
- 设置
✅ 直观理解:16 个卷积核就像 16 个不同的 "滤镜" ------ 有的滤镜找边缘,有的找拐角,有的找纹理,最后把 16 张滤镜效果叠起来,就是 CNN 提取的 "特征"。
② kernel_size:卷积核的"视野大小"
卷积核是 CNN 看图片的"小窗口",常见值和选择逻辑:
kernel_size=3:业界首选(VGGNet 证明:堆叠 2 个 3×3 卷积 ≈ 1 个 5×5 卷积,但参数量更少);
✅ 参数量对比:3×3 核 = 9 个参数,5×5 核 = 25 个参数,差距一目了然;
kernel_size=5:偶尔用在第一层(需要更大的初始视野);kernel_size=1:面试高频考点!看似"没用",实则是"降维神器"(下文面试题详细说)。
③ stride:卷积核的"滑动步子"
卷积核在图片上滑动的步长,直接影响输出特征图的尺寸:
stride=1:步步为营,每个像素都扫(默认值,保留更多细节);stride=2:隔一个像素扫一次,输出尺寸直接减半(轻量级下采样);
✅ MATLAB 类比:就像 imresize(img, 0.5) 缩小图片,但 stride=2 是"带特征提取的缩小",而非单纯缩放。
④ padding:防止图片 "越卷越小" 的关键
卷积核扫到图片边缘时,会因为 "没地方落脚" 导致输出尺寸变小 ------ padding 就是在图片周围补 0,解决这个问题:
padding=0(Valid Padding):不补 0,输出尺寸必然变小(比如 32×32 图片用 3×3 核,输出 30×30);padding=1(Same Padding):补 1 圈 0,32×32 图片用 3×3 核,输出还是 32×32(尺寸不变);
✅ 记忆技巧:padding = (kernel_size - 1) // 2 → 3×3 核 padding=1,5×5 核 padding=2,刚好实现 Same Padding。
2.3 硬核补充:卷积层的权值共享计算
为什么 CNN 参数量少?核心是 "权值共享" ------ 咱们算一笔账:
- 假设输入是 32×32×3 彩图,卷积层
out_channels=16,kernel_size=3; - 每个卷积核的参数 = 3×3×3 = 27 个(3 通道 × 3×3 核);
- 16 个卷积核总参数 = 16×27 = 432 个;
- 对比 MLP:输入 32×32×3=3072 节点,隐藏层 16 节点,参数=3072×16=49,152 个;
→ CNN 参数量只有 MLP 的 1/114!这就是权值共享的威力。
3. 核心武器二:池化层 (Pooling)
卷积层提取的特征图还是太大(比如 32×32×16),包含大量冗余信息(比如背景、重复纹理)------ 池化层就是 "特征浓缩器",核心作用是 "降维不减效"。
3.1 最常用的 MaxPool2d:只留 "最显眼的特征"
nn.MaxPool2d 逻辑简单到离谱,但效果极佳:在指定窗口(比如 2×2)里,只保留最大值,其余值全部扔掉。
python
# 2×2 最大池化,步长 2(尺寸减半)
pool_layer = nn.MaxPool2d(kernel_size=2, stride=2)为什么选"最大值"?
最大值代表窗口内 "最显著的特征" ------ 比如 2×2 窗口里有一个像素值是 255(亮边),其余是 0,保留 255 就等于保留了 "边缘" 这个核心特征,扔掉 0 不影响结果。
最大池化的两大核心作用(面试必答):
- 降维提速:2×2 池化 + stride=2 → 特征图长宽减半,数据量减少 75%,训练速度直接翻倍;
- 平移不变性:物体稍微移动(比如数字 "8" 偏了 1 个像素),最大值还在窗口里,输出不变,模型鲁棒性大幅提升。
✅ MATLAB 类比:就像 blockproc(img, [2 2], @(x) max(x.data(:))),对每个 2×2 块取最大值,本质是 "带特征筛选的下采样"。
3.2 补充:AvgPool2d(平均池化)什么时候用?
除了最大池化,还有平均池化(取窗口内平均值),两者的选择逻辑:
MaxPool2d:适合提取 "边缘、纹理" 等局部显著特征(分类任务首选);AvgPool2d:适合保留 "全局亮度、背景" 等整体信息(分割/检测任务偶尔用);
❌ 避坑:别在分类任务的关键层用 AvgPool2d,会丢失核心特征,导致准确率下降。
3.3 池化层的 "坑":过度池化
堆叠太多池化层,导致特征图太小(比如 32×32 → 16×16 → 8×8 → 4×4),最后特征丢失严重。
✅ 实战原则:分类任务中,池化层最多用 2~3 层(比如 CIFAR-10 用 2 层池化,从 32×32 到 8×8 就够了)。
4. 硬核实战:手算维度(面试必考!)
算法岗笔试/面试中,"计算卷积/池化后的维度" 是 100% 必考的题 ------ 别光会调包,必须会手动算!
4.1 通用维度计算公式
先记牢卷积层和池化层的通用公式(用 MATLAB 老鸟熟悉的 "向下取整" 逻辑):
卷积层维度公式
输入尺寸: Hin×Win
卷积参数:kernel_size=K, stride=S, padding=P
输出尺寸:
Hout=⌊SHin+2×P−K+1⌋,Wout=⌊SWin+2×P−K+1⌋
( ⌊⋅⌋ 是向下取整,比如 (31-3)/2 +1 = 15 → 刚好整除)
池化层维度公式
池化层没有 padding(少数情况有,但面试不考),公式简化为:
Hout=⌊SHin−K+1⌋,Wout=⌊SWin−K+1⌋
4.2 多案例实操(从易到难)
咱们用 CIFAR-10(32×32 RGB 图)做例子,覆盖面试常见场景:
案例 1:Same Padding 卷积(尺寸不变)
输入: 32×32×3
卷积层:nn.Conv2d(3, 16, 3, stride=1, padding=1)
计算:
Hout=(32+2×1−3)/1+1=32
输出: 32×32×16(尺寸不变,通道数从 3→16)
案例 2:Valid Padding 卷积(尺寸缩小)
输入: 32×32×3
卷积层:nn.Conv2d(3, 16, 3, stride=1, padding=0)
计算:
Hout=(32+0−3)/1+1=30
输出: 30×30×16(尺寸缩小 2 像素)
案例 3:卷积 + 池化(组合操作)
输入: 32×32×3
步骤 1:卷积(3→16,3×3,padding=1,stride=1)→ 32×32×16
步骤 2:池化(2×2,stride=2)→ Hout=(32−2)/2+1=16
最终输出: 16×16×16(尺寸减半,通道数不变)
案例 4:stride=2 卷积(替代池化)
输入: 32×32×3
卷积层:nn.Conv2d(3, 16, 3, stride=2, padding=1)
计算:
Hout=(32+2×1−3)/2+1=16
输出: 16×16×16(一步实现"卷积+下采样",面试常考这种替代方案)
4.3 验证技巧:用 PyTorch 跑一遍
写两行代码验证 ------ 这是 Debug 复杂网络的核心技巧:
python
import torch
import torch.nn as nn
# 模拟 CIFAR-10 图片:Batch=1, Channel=3, Height=32, Width=32
dummy_img = torch.randn(1, 3, 32, 32)
print(f"原始尺寸: {dummy_img.shape}") # torch.Size([1, 3, 32, 32])
# 案例 4 验证:stride=2 卷积
conv_stride2 = nn.Conv2d(3, 16, 3, stride=2, padding=1)
x = conv_stride2(dummy_img)
print(f"stride=2 卷积后尺寸: {x.shape}") # [1, 16, 16, 16]5. 硬核实操:CNN 积木块 + 特征可视化
光算维度不够,咱们搭一个完整的 CNN 基础块,还能看到 "卷积核长啥样" "特征图是什么效果"。
5.1 搭建 CNN 基础积木块(含激活函数)
CNN 不是孤立的卷积+池化,必须加激活函数(ReLU)引入非线性,否则多层卷积 = 单层卷积:
python
import torch
import torch.nn as nn
import matplotlib.pyplot as plt
# 定义一个 CNN 基础块(卷积 + ReLU + 池化)
class CNNBlock(nn.Module):
def __init__(self, in_channels, out_channels):
super(CNNBlock, self).__init__()
# 卷积+ReLU+池化 组合
self.conv = nn.Conv2d(in_channels, out_channels, 3, stride=1, padding=1)
self.relu = nn.ReLU()
self.pool = nn.MaxPool2d(2, stride=2)
def forward(self, x):
x = self.conv(x)
x = self.relu(x)
feat_map = x # 保存卷积 + ReLU后的特征图
x = self.pool(x)
return x, feat_map
# 1. 导入图片(用我的 Kuromi 头像)
img = Image.open("Kuromi.jpg")
transform = transforms.ToTensor()
img_tensor = transform(img)
img_tensor = img_tensor.unsqueeze(0) # [1, 3, H, W]
# 2. 实例化 CNN 块
cnn_block = CNNBlock(3, 16)
# 3. 前向传播
output, feat_map = cnn_block(dummy_img)5.2 可视化 1:看卷积核长啥样
训练前的卷积核是随机初始化的,咱们把它画出来(学之前的核):
python
# 提取卷积层的权重(卷积核)
conv_weights = cnn_block.conv.weight.data # 形状:[16, 3, 3, 3](16个核,3通道,3×3)
# 画前8个卷积核(每个核的3个通道)
fig, axes = plt.subplots(8, 3, figsize=(8, 16))
for i in range(8):
# 取第i个卷积核的3个通道(R/G/B)
for c in range(3):
kernel = conv_weights[i, c, :, :].cpu().numpy()
# 归一化到0~1(方便显示)
kernel = (kernel - kernel.min()) / (kernel.max() - kernel.min())
axes[i, c].imshow(kernel, cmap='gray')
axes[i, c].axis('off')
axes[i, c].set_title(f"Kernel {i+1}, Channel {c+1}")
plt.tight_layout()
plt.savefig("conv_kernels.png")
plt.show()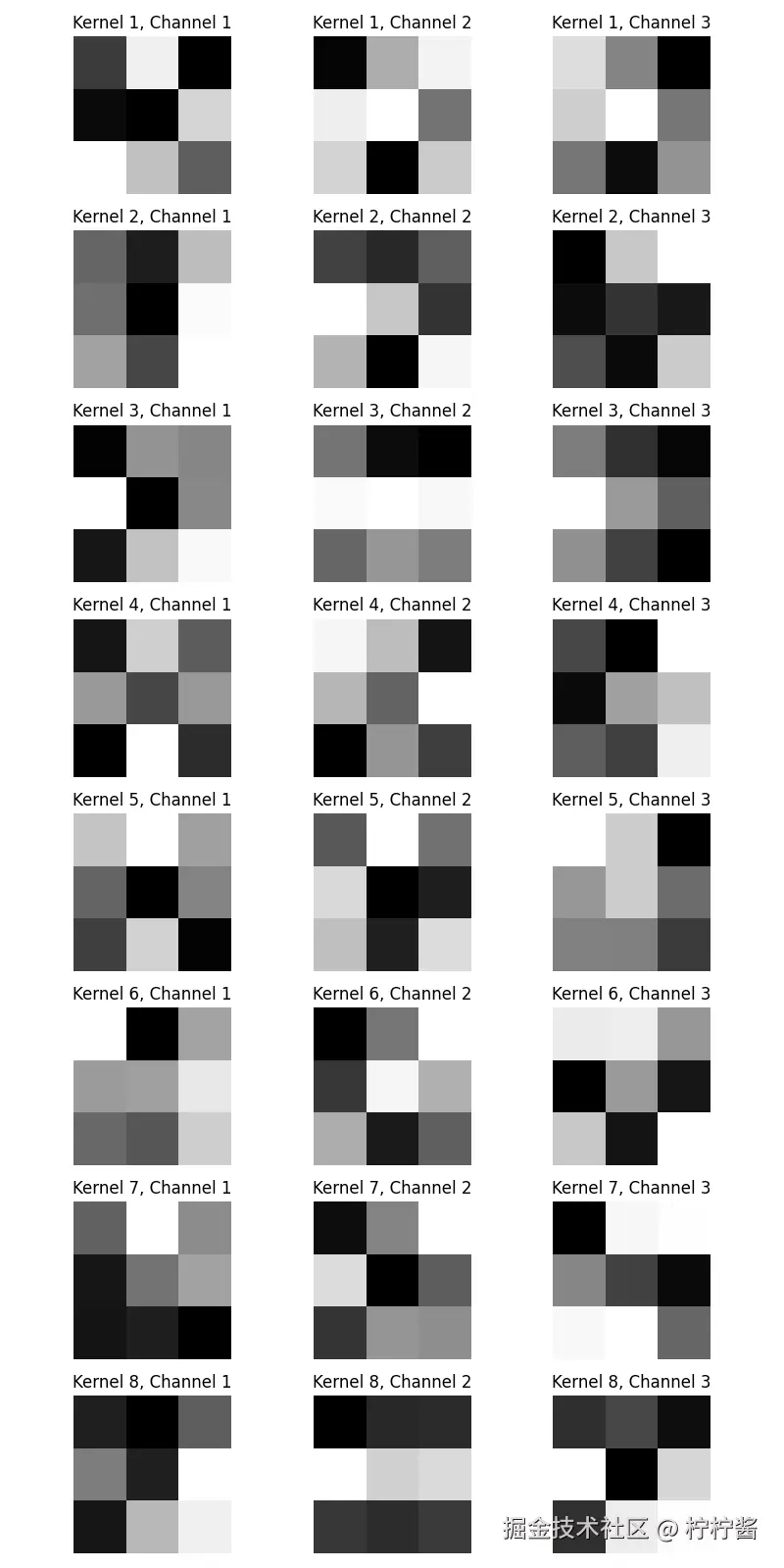
5.3 可视化 2:看特征图是什么效果
卷积+ReLU 后的特征图是 CNN "看到的东西",咱们画前8张特征图:
python
# 提取第一张特征图(Batch=1,取第0个)
feat_map_np = feat_map[0].cpu().numpy() # 形状:[16, 32, 32]
# 画前8张特征图
fig, axes = plt.subplots(2, 4, figsize=(12, 6))
axes = axes.flatten()
for i in range(8):
img = feat_map_np[i]
# 归一化显示
img = (img - img.min()) / (img.max() - img.min())
axes[i].imshow(img, cmap='gray')
axes[i].axis('off')
axes[i].set_title(f"Feature Map {i+1}")
plt.tight_layout()
plt.savefig("feature_maps.png")
plt.show()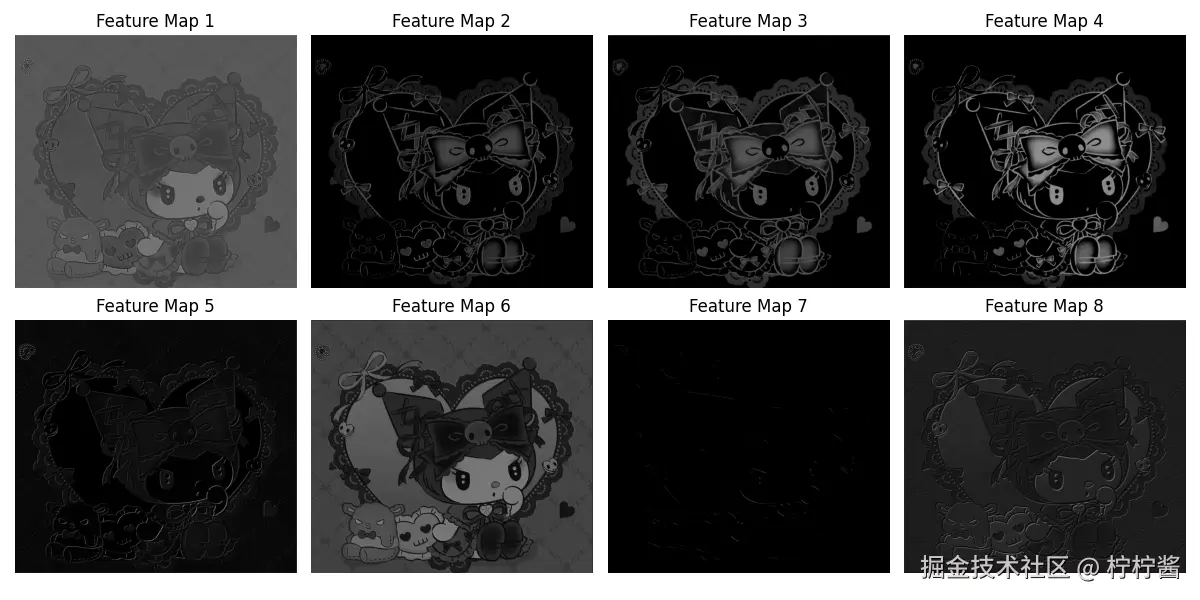 ✅ 直观结论:不同特征图对应不同的 "滤镜效果" ------ 有的亮区集中在中间,有的集中在边缘,这就是 CNN 提取的 "局部特征"。
✅ 直观结论:不同特征图对应不同的 "滤镜效果" ------ 有的亮区集中在中间,有的集中在边缘,这就是 CNN 提取的 "局部特征"。
6. 面试避坑指南 (Interview Q&A)
结合算法岗高频面试题,咱们按"新手能听懂、面试官满意"的思路整理,直接背!
Q1:1×1 卷积有什么用?(高频中的高频)
1×1 卷积看似 "只看一个像素",实则是 CNN 的 "降维神器",核心作用有两个:
- 降维/升维:在不改变特征图长宽的前提下,调整通道数。比如用 1×1 卷积把 64 通道的特征图降到 16 通道,参数量只有 64×16×1×1=1024 个,比 3×3 卷积高效得多;
- 实现跨通道交互:替代全连接层,在保持空间结构的同时完成通道维度的特征融合。
Q2:卷积层和全连接层的核心区别?
核心区别在"连接方式"和"参数量":
- 全连接层(FC):全局连接,每个输出节点和所有输入节点相连,参数量爆炸,且不具备平移不变性(数字 "8" 移到右边,MLP 就认不出来了);
- 卷积层(Conv):局部连接 + 权值共享,参数量只有全连接层的几百分之一,且因为权值共享,不管物体在图片的哪个位置,卷积核都能识别 ------ 天然具备平移不变性,适合处理图像。
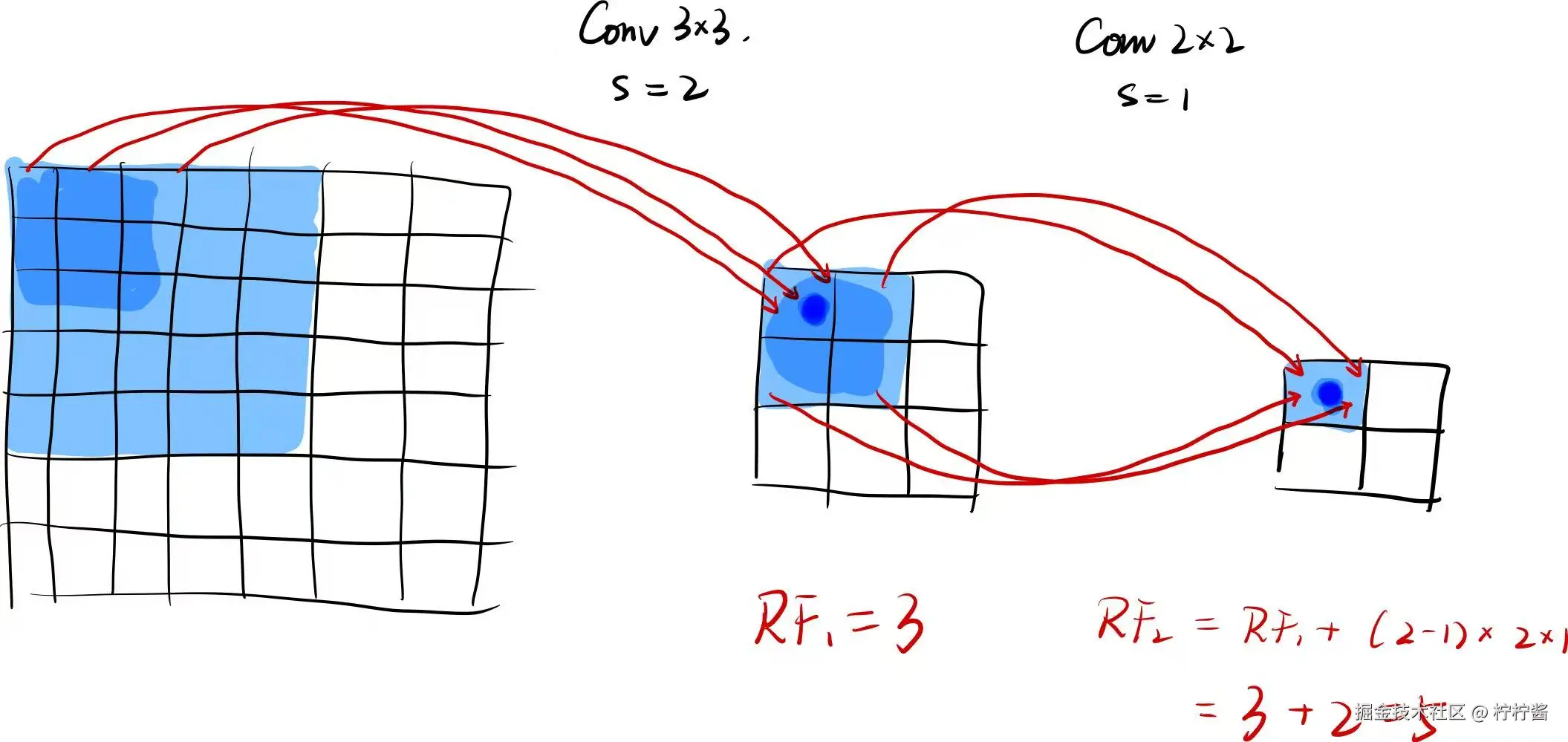
Q3:感受野(Receptive Field)是什么?怎么计算?(笔试必考)
感受野 是卷积神经网络(CNN) 中的核心概念,指的是:特征图上的一个像素点,对应输入图像的区域范围 。简单来说,特征图里的每个像素,都是由输入图像中一块固定区域的像素计算而来,这块区域就是这个特征点的感受野。感受野的大小会随着网络层数增加而扩大,这也是CNN能从局部特征(如边缘、纹理)逐步提取全局特征(如物体轮廓、类别)的关键。
在单层卷积的基础上,叠加第二层卷积,就能直观看到感受野如何变大。多层卷积的感受野需要递归计算,公式如下:RFn=RFn−1+(kn−1)×∏i=1n−1si
其中:
- RFn:第 n层的感受野大小
- kn:第 n层的卷积核大小
- sn:第 n层的步幅
- RF1=k1:第一层感受野等于卷积核大小
Q4:池化层可以用卷积层替代吗?(进阶题)
可以!用
stride=2的卷积层(比如3×3,stride=2,padding=1)替代MaxPool2d,效果甚至更好:① 替代逻辑:
stride=2的卷积层能实现"下采样+特征提取",而池化层只有下采样,没有特征提取;② 实战场景:现代 CNN(比如 ResNet)几乎不用池化层,而是用
stride=2的卷积层做下采样,减少特征丢失。
Q5:padding 的作用有哪些?(基础题)
核心作用有两个:
① 保持输出尺寸:避免图片 "越卷越小" (比如 Same Padding 让卷积前后尺寸不变);
② 保留边缘特征:不 padding 的话,图片边缘的像素只会被卷积核扫 1 次,内部像素被扫多次,边缘特征容易丢失 ------ padding 让边缘像素和内部像素被扫的次数一致,保留更多边缘信息。
总结
- CNN 对比 MLP 的核心优势是 "局部连接 + 权值共享",既保留空间特征,又大幅减少参数量;
- 卷积层关键参数要记牢:Same Padding 公式
padding=(K-1)//2,维度计算公式是面试必背; - 池化层核心作用是降维和提升鲁棒性,实战中优先用
MaxPool2d,且避免过度池化; - 特征可视化是理解 CNN 的关键,能直观看到卷积核和特征图的效果,面试中提这个会加分。
📌 下期预告
卷积和池化的"兵器"已经磨好,维度计算、特征可视化也吃透了 ------ 是时候离开 MNIST 这个 "新手村",挑战更复杂的 CIFAR-10 了!下一篇,我会手把手教你把今天的 CNN 积木块搭建成完整的分类网络,从数据集加载、网络搭建、训练调参,到特征图可视化、过拟合解决,全程用 MATLAB 老鸟能懂的逻辑拆解;总结 CNN 调参的核心技巧,让你不仅能跑通 CIFAR-10,还能把这套思路迁移到真实的图像分类场景中!
欢迎关注我的专栏,见证 MATLAB 老鸟到算法工程师的进阶之路!