文章目录
- 一、向量的概念与基本运算
-
- [1. 向量的代数定义](#1. 向量的代数定义)
- [2. 向量的基本运算](#2. 向量的基本运算)
- 二、向量内积与正交性
- 三、向量组的线性关系
- 四、向量组的秩与极大线性无关组
-
- [1. 极大线性无关组](#1. 极大线性无关组)
- [2. 向量组的秩](#2. 向量组的秩)
- [五、等价矩阵 vs 等价向量组](#五、等价矩阵 vs 等价向量组)
-
- [1. 等价矩阵](#1. 等价矩阵)
- [2. 等价向量组](#2. 等价向量组)
- [3. 二者区别](#3. 二者区别)
- 六、向量空间(数一)
-
- [1. 基本概念](#1. 基本概念)
- [2. 基变换与坐标变换](#2. 基变换与坐标变换)
一、向量的概念与基本运算
1. 向量的代数定义
n 维向量是由 n 个实数构成的有序数组,分为两种形式:
-
行向量: α T = ( a 1 , a 2 , . . . , a n ) \boldsymbol{\alpha^T} = (a_1, a_2, ..., a_n) αT=(a1,a2,...,an)(横向排列,本质是 1×n 矩阵)
-
列向量: α = ( a 1 a 2 . . . a n ) \boldsymbol{\alpha} = \begin{pmatrix} a_1 \\ a_2 \\ ... \\ a_n \end{pmatrix} α= a1a2...an (纵向排列,本质是 n×1 矩阵)
注:行向量与列向量是 "互为转置" 的关系,在运算中需注意维度匹配(如行向量 × 列向量可求内积,列向量 × 行向量得到秩 1 矩阵)。
2. 向量的基本运算
相等 :两个向量相等 ⟺ \iff ⟺ 同型(同为行 / 列向量且维度相同)且对应分量完全相同。
例: ( 1 , 2 ) ≠ ( 1 , 2 , 3 ) (1,2) \neq (1,2,3) (1,2)=(1,2,3)(不同维); ( 1 , 2 ) ≠ ( 2 , 1 ) (1,2) \neq (2,1) (1,2)=(2,1)(分量不同)。
加法:同型向量对应分量相加,即
α + β = ( a 1 + b 1 , a 2 + b 2 , . . . , a n + b n ) \boldsymbol{\alpha} + \boldsymbol{\beta} = (a_1+b_1, a_2+b_2, ..., a_n+b_n) α+β=(a1+b1,a2+b2,...,an+bn)
(性质:交换律、结合律,零向量是加法单位元)
数乘 :常数 k k k乘向量的每个分量,即
k α = ( k a 1 , k a 2 , . . . , k a n ) k\boldsymbol{\alpha} = (ka_1, ka_2, ..., ka_n) kα=(ka1,ka2,...,kan)
(几何意义: k > 0 k>0 k>0 时同向伸缩, k < 0 k<0 k<0 时反向伸缩, ∣ k ∣ > 1 |k|>1 ∣k∣>1 伸长, ∣ k ∣ < 1 |k|<1 ∣k∣<1 缩短)
二、向量内积与正交性
1. 内积(点积)的定义
对 n 维向量 α = ( a 1 , . . . , a n ) \boldsymbol{\alpha} = (a_1,...,a_n) α=(a1,...,an) 和 β = ( b 1 , . . . , b n ) \boldsymbol{\beta} = (b_1,...,b_n) β=(b1,...,bn),内积定义为:
⟨ α , β ⟩ = ∑ i = 1 n a i b i = a 1 b 1 + a 2 b 2 + ⋯ + a n b n \langle \boldsymbol{\alpha}, \boldsymbol{\beta} \rangle = \sum_{i=1}^{n} a_i b_i = a_1 b_1 + a_2 b_2 + \dots + a_n b_n ⟨α,β⟩=∑i=1naibi=a1b1+a2b2+⋯+anbn
-
列向量 :若 α \boldsymbol{\alpha} α 和 β \boldsymbol{\beta} β 为 n×1 列向量,内积为 ⟨ α , β ⟩ = α T β \langle \boldsymbol{\alpha}, \boldsymbol{\beta} \rangle = \boldsymbol{\alpha}^T \boldsymbol{\beta} ⟨α,β⟩=αTβ
-
行向量 :若 α \boldsymbol{\alpha} α 和 β \boldsymbol{\beta} β 为 1×n 行向量,内积为 ⟨ α , β ⟩ = α β T \langle \boldsymbol{\alpha}, \boldsymbol{\beta} \rangle = \boldsymbol{\alpha} \boldsymbol{\beta}^T ⟨α,β⟩=αβT
无论向量类型,内积结果均为实数(1×1 矩阵)。
2. 内积的性质
-
正定性 : ⟨ α , α ⟩ = ∑ i = 1 n a i 2 = ∣ ∣ α ∣ ∣ 2 ≥ 0 \langle \boldsymbol{\alpha}, \boldsymbol{\alpha} \rangle =\sum\limits_{i=1}^{n} a_i^2=||\boldsymbol{\alpha}||^2\geq 0 ⟨α,α⟩=i=1∑nai2=∣∣α∣∣2≥0,当且仅当 α = 0 \boldsymbol{\alpha} = \boldsymbol{0} α=0 时等号成立。
-
对称性 : ⟨ α , β ⟩ = ⟨ β , α ⟩ = ∣ ∣ α ∣ ∣ ⋅ ∣ ∣ β ∣ ∣ cos θ \langle \boldsymbol{\alpha}, \boldsymbol{\beta} \rangle = \langle \boldsymbol{\beta}, \boldsymbol{\alpha} \rangle=||\boldsymbol{\alpha}|| \cdot ||\boldsymbol{\beta}||\cos{\theta} ⟨α,β⟩=⟨β,α⟩=∣∣α∣∣⋅∣∣β∣∣cosθ( θ \theta θ 为两向量夹角)。
-
线性性:
⟨ k α , β ⟩ = k ⟨ α , β ⟩ \langle k\boldsymbol{\alpha}, \boldsymbol{\beta} \rangle = k\langle \boldsymbol{\alpha}, \boldsymbol{\beta} \rangle ⟨kα,β⟩=k⟨α,β⟩;
⟨ α + γ , β ⟩ = ⟨ α , β ⟩ + ⟨ γ , β ⟩ \langle \boldsymbol{\alpha} + \boldsymbol{\gamma}, \boldsymbol{\beta} \rangle = \langle \boldsymbol{\alpha}, \boldsymbol{\beta} \rangle + \langle \boldsymbol{\gamma}, \boldsymbol{\beta} \rangle ⟨α+γ,β⟩=⟨α,β⟩+⟨γ,β⟩。
3. 正交与模长
(1)模长(范数)
向量 α \boldsymbol{\alpha} α 的 L2 范数(几何长度):
∥ α ∥ = ⟨ α , α ⟩ = ∑ i = 1 n a i 2 \|\boldsymbol{\alpha}\| = \sqrt{\langle \boldsymbol{\alpha}, \boldsymbol{\alpha} \rangle} = \sqrt{\sum\limits_{i=1}^n{a_i}^2} ∥α∥=⟨α,α⟩ =i=1∑nai2
- 单位向量:模长为1的向量,非零向量可单位化为 α 0 = α ∣ ∣ α ∣ ∣ \boldsymbol{\alpha}^0 = \frac{\boldsymbol{\alpha}}{||\boldsymbol{\alpha}||} α0=∣∣α∣∣α。
- 维度特性:二维空间中,与某向量正交的单位向量有 2 个;三维及以上维度中,正交单位向量构成对应子空间。
⚠️ 注意区分:
∣ A ∣ |A| ∣A∣:矩阵 A A A的行列式(标量,反映矩阵 "体积" 或 "可逆性")。
∣ ∣ A ∣ ∣ ||A|| ∣∣A∣∣:矩阵 A A A的范数(衡量矩阵大小的方式,如 Frobenius 范数、谱范数等)。
二者背景不同:行列式侧重代数性质,范数侧重几何性质或大小度量。
(2)正交相关定义
向量正交 :若 ⟨ α , β ⟩ = 0 \langle \boldsymbol{\alpha}, \boldsymbol{\beta} \rangle = 0 ⟨α,β⟩=0,则 α \boldsymbol{\alpha} α 与 β \boldsymbol{\beta} β 正交(几何意义:垂直)。
例: α = ( 1 , 0 ) T \boldsymbol{\alpha}=(1,0)^T α=(1,0)T 与 β = ( 0 , 1 ) T \boldsymbol{\beta}=(0,1)^T β=(0,1)T 正交(内积 = 0)。
正交向量组 :两两正交的非零向量组,即对 { α 1 , . . . , α m } \{\boldsymbol{\alpha}_1, ..., \boldsymbol{\alpha}_m\} {α1,...,αm},满足 ⟨ α i , α j ⟩ = 0 \langle \boldsymbol{\alpha}_i, \boldsymbol{\alpha}_j \rangle = 0 ⟨αi,αj⟩=0( i ≠ j i \neq j i=j) 且 α i ≠ 0 \boldsymbol{\alpha}_i \neq \boldsymbol{0} αi=0( i = 1 , . . . , m i=1,...,m i=1,...,m)。
规范正交基 :正交且单位化的向量组,满足 ⟨ α i , α j ⟩ = { 1 ( i = j ) 0 ( i ≠ j ) \langle \boldsymbol{\alpha}_i, \boldsymbol{\alpha}_j \rangle = \begin{cases} 1 & (i=j) \\ 0 & (i \neq j) \end{cases} ⟨αi,αj⟩={10(i=j)(i=j)
例: R 3 \mathbb{R}^3 R3 的标准基 { ( 1 , 0 , 0 ) T , ( 0 , 1 , 0 ) T , ( 0 , 0 , 1 ) T } \{(1,0,0)^T, (0,1,0)^T, (0,0,1)^T\} {(1,0,0)T,(0,1,0)T,(0,0,1)T}。
4. 正交矩阵
定义 :n 阶实矩阵 A A A 满足 A T A = E A^\mathrm{T} A = E ATA=E(等价于 A − 1 = A T A^{-1} = A^\mathrm{T} A−1=AT,正交矩阵必可逆)。
核心性质:
- 行/列向量组均为规范正交基;
- 行列式 ∣ A ∣ = ± 1 |A| = \pm 1 ∣A∣=±1;
- 几何意义:对应保距变换(旋转、反射等,保持内积和长度不变)。
三、向量组的线性关系
1. 线性组合与线性表示
线性组合 :对向量组 S = { α 1 , . . . , α m } S = \{\boldsymbol{\alpha}_1, ..., \boldsymbol{\alpha}_m\} S={α1,...,αm},形如 k 1 α 1 + . . . + k m α m k_1\boldsymbol{\alpha}_1 + ... + k_m\boldsymbol{\alpha}_m k1α1+...+kmαm( k i k_i ki 为实数)的向量称为 S S S 的线性组合。
线性表示 :若 β = k 1 α 1 + . . . + k m α m \boldsymbol{\beta} = k_1\boldsymbol{\alpha}_1 + ... + k_m\boldsymbol{\alpha}_m β=k1α1+...+kmαm,则 β \boldsymbol{\beta} β 可由 S S S 线性表示, ( k 1 , . . . , k m ) (k_1,...,k_m) (k1,...,km) 为表示系数(系数不唯一 ⟺ S \iff S ⟺S 线性相关)。
2. 线性相关与线性无关
向量组的相关性是 "非黑即白" 的 ------ 要么相关(含 "多余" 向量),要么无关(全 "独立"),无中间状态。
(1)定义
线性相关 :存在不全为 0 的常数 k 1 , . . . , k m k_1,...,k_m k1,...,km,使 k 1 α 1 + . . . + k m α m = 0 k_1\boldsymbol{\alpha}_1 + ... + k_m\boldsymbol{\alpha}_m = \boldsymbol{0} k1α1+...+kmαm=0。
(意义:组中至少一个向量可由其余向量表示,存在 "多余" 向量)
线性无关 :仅当 k 1 = . . . = k m = 0 k_1=...=k_m=0 k1=...=km=0 时, k 1 α 1 + . . . + k m α m = 0 k_1\boldsymbol{\alpha}_1 + ... + k_m\boldsymbol{\alpha}_m = \boldsymbol{0} k1α1+...+kmαm=0 成立。
(意义:所有向量 "独立",任一向量不能由其余表示)
(2)方程组视角
设矩阵 A = ( α 1 , . . . , α m ) A = (\boldsymbol{\alpha}_1, ..., \boldsymbol{\alpha}_m) A=(α1,...,αm)(列向量构成):
-
线性相关 ⟺ \iff ⟺ 齐次方程组 A x = 0 A\boldsymbol{x} = \boldsymbol{0} Ax=0 有非零解 ⟺ r ( A ) < m \iff r(A) < m ⟺r(A)<m;
-
线性无关 ⟺ \iff ⟺ 齐次方程组 A x = 0 A\boldsymbol{x} = \boldsymbol{0} Ax=0 仅有零解 ⟺ r ( A ) = m \iff r(A) = m ⟺r(A)=m。
维度推论:
n < m n<m n<m(方程数 < 未知数个数):齐次线性方程组必有非零解,故 n+1 个 n 维向量必线性相关;
n = m n=m n=m :行列式 ∣ A ∣ = 0 ⟺ |A|=0 \iff ∣A∣=0⟺ 非零解(相关); ∣ A ∣ ≠ 0 ⟺ |A| \neq 0 \iff ∣A∣=0⟺ 零解(无关);
n > m n>m n>m :无"方程数<未知数个数"的约束,需直接判断秩与向量个数的关系。
(3)易错点总结
-
单个向量:非零向量线性无关,零向量线性相关;
-
含零向量的组:必线性相关(取零向量系数为 1,其余为 0 即可);
-
部分与整体:
-
部分相关 ⟹ \implies ⟹ 整体相关;
-
整体无关 ⟹ \implies ⟹ 部分无关。
{ α 1 , . . . , α s } \{\boldsymbol{\alpha}_1,..., \boldsymbol{\alpha}_s\} {α1,...,αs} 线性无关,说明这 m 个向量张成 m 维空间,那么即使去掉 n (n<m) 个向量,剩下的 m-n 个向量依然张成 m-n 维空间,即这 m-n 个向量线性无关。
-
这是向量组中向量的++个数变化++ 的性质,注意与下方向量组中++维度变化++性质作区分。
个数变化:{(1,0),(0,1)} -> {(1,0),(0,1),(1,1)}(添加向量导致相关);
维度变化:{(1,0),(0,1)} -> {(1,0,1),(0,1,0)} (升维后仍无关)。
3. 线性相关性判别定理
-
若 S = { α 1 , . . . , α m } S = \{\boldsymbol{\alpha}_1, ..., \boldsymbol{\alpha}_m\} S={α1,...,αm} 线性无关,且 S ∪ { β } S \cup \{\boldsymbol{\beta}\} S∪{β} 线性相关,则 β \boldsymbol{\beta} β 可由 S S S 唯一线性表示。
-
"以少表多,多的必相关":若 { β 1 , . . . , β t } \{\boldsymbol{\beta}_1,..., \boldsymbol{\beta}_t\} {β1,...,βt} 可由 { α 1 , . . . , α s } \{\boldsymbol{\alpha}_1,..., \boldsymbol{\alpha}_s\} {α1,...,αs} 线性表示,且 t > s t > s t>s,则 { β 1 , . . . , β t } \{\boldsymbol{\beta}_1,..., \boldsymbol{\beta}_t\} {β1,...,βt} 线性相关。
其等价命题:若 { β 1 , . . . , β t } \{\boldsymbol{\beta}_1,..., \boldsymbol{\beta}_t\} {β1,...,βt} 可由 { α 1 , . . . , α s } \{\boldsymbol{\alpha}_1,..., \boldsymbol{\alpha}_s\} {α1,...,αs} 线性表示,且 { β 1 , . . . , β t } \{\boldsymbol{\beta}_1,..., \boldsymbol{\beta}_t\} {β1,...,βt} 线性无关,则 t ≤ s t \leq s t≤s。
高维空间能表示低维空间,低维空间不能表示高维空间。
-
向量 β \boldsymbol{\beta} β 可由 { α 1 , . . . , α s } \{\boldsymbol{\alpha}_1,..., \boldsymbol{\alpha}_s\} {α1,...,αs} 线性表示 ⟺ \iff ⟺ 非齐次方程组 A x = β A\boldsymbol{x}=\boldsymbol{\beta} Ax=β( A = ( α 1 , . . . , α s ) A=(\boldsymbol{\alpha}_1,..., \boldsymbol{\alpha}_s) A=(α1,...,αs))有解 ⟺ r ( A ) = r ( A , β ) \iff r(A) = r(A, \\boldsymbol{\\beta}) ⟺r(A)=r(A,β)(系数矩阵秩 = 增广矩阵秩)。
向量 β \boldsymbol{\beta} β 不能由 { α 1 , . . . , α s } \{\boldsymbol{\alpha}_1,..., \boldsymbol{\alpha}_s\} {α1,...,αs} 线性表示 ⟺ \iff ⟺ 非齐次方程组 A x = β A\boldsymbol{x}=\boldsymbol{\beta} Ax=β( A = ( α 1 , . . . , α s ) A=(\boldsymbol{\alpha}_1,..., \boldsymbol{\alpha}_s) A=(α1,...,αs))无解 ⟺ r ( A ) + 1 = r ( A , β ) \iff r(A) +1= r(A, \\boldsymbol{\\beta}) ⟺r(A)+1=r(A,β)。
-
低维无关 ⟹ \implies ⟹ 高维无关(相同位置添加分量后仍无关);高维相关 ⟹ \implies ⟹ 低维相关(去掉相同分量后仍相关)。比如 { ( 1 , 0 ) , ( 0 , 1 ) } \{(1,0),(0,1)\} {(1,0),(0,1)} 与 { ( 1 , 0 , 2 ) , ( 0 , 1 , 3 ) } \{(1,0,2),(0,1,3)\} {(1,0,2),(0,1,3)} .
-
n + 1 n+1 n+1 个 n 维向量必线性相关(方程个数 n n n < 未知数个数 n + 1 n+1 n+1,齐次方程组必有非零解)。
四、向量组的秩与极大线性无关组
1. 极大线性无关组
(1)定义
设向量组 S = { α 1 , . . . , α m } S = \{\boldsymbol{\alpha}1,..., \boldsymbol{\alpha}m\} S={α1,...,αm},若部分组 S 0 = { α i 1 , . . . , α i r } S_0 = \{\boldsymbol{\alpha}{i_1}, ..., \boldsymbol{\alpha}{i_r}\} S0={αi1,...,αir} 满足:
-
S 0 S_0 S0 线性无关;
-
S S S 中任一向量可由 S 0 S_0 S0 线性表示(或: S 0 S_0 S0 添加 S S S 中其他向量后必相关)。
则称 S 0 S_0 S0 为 S S S 的极大线性无关组。
(2)关键性质
不唯一性 :一个向量组可能有多个极大无关组(例: { ( 1 , 0 ) , ( 0 , 1 ) , ( 1 , 1 ) } \{(1,0),(0,1),(1,1)\} {(1,0),(0,1),(1,1)}的极大无关组可为 { ( 1 , 0 ) , ( 0 , 1 ) } \{(1,0),(0,1)\} {(1,0),(0,1)}或 { ( 1 , 0 ) , ( 1 , 1 ) } \{(1,0),(1,1)\} {(1,0),(1,1)})。
个数唯一性:所有极大无关组的向量个数相同(即向量组的秩)。
等价性:向量组与其任一极大无关组等价(双向线性表示)。
特殊情况:全零向量组无极大无关组;线性无关向量组的极大无关组是其本身。
2. 向量组的秩
(1)定义与几何意义
定义 :向量组的极大无关组所含向量的个数,记为 r ( S ) r(S) r(S) 或 r a n k ( S ) rank(S) rank(S)。全零向量组的秩为 0(无极大无关组)。
几何意义 :秩是向量组 "张成空间" 的维数( r = 1 r=1 r=1 张成直线, r = 2 r=2 r=2 张成平面, r = 3 r=3 r=3 张成 3 维空间)。
补充结论:伴随矩阵 A ∗ A^* A∗ 的秩规律(n 阶方阵):
r ( A ∗ ) = { n , r ( A ) = n 1 , r ( A ) = n − 1 0 , r ( A ) ≤ n − 2 r(A^*) = \begin{cases} n, & r(A)=n \\ 1, & r(A)=n-1 \\ 0, & r(A)\leq n-2\end{cases} r(A∗)=⎩ ⎨ ⎧n,1,0,r(A)=nr(A)=n−1r(A)≤n−2
对应向量组: A ∗ A^* A∗ 行/列向量组, r ( A ∗ ) = n r(A^*)=n r(A∗)=n 时线性无关; r ( A ∗ ) = 1 r(A^*)=1 r(A∗)=1 时两两成比例; r ( A ∗ ) = 0 r(A^*)=0 r(A∗)=0 时全为零向量。
(2)重要结论
- 三秩相等:矩阵的秩 = 其行向量组的秩 = 其列向量组的秩。
- 初等行变换性质:设矩阵 A A A 经有限次初等行变换化为矩阵 B B B,则 A A A 与 B B B 的行向量组彼此等价,且两矩阵对应位置的列向量组具有一致的线性相关性(即同时线性相关或同时线性无关);
- 若向量组 B B B 可由向量组 A A A 表示,则 r ( B ) ≤ r ( A ) r(B) \leq r(A) r(B)≤r(A)。
- 等价向量组的秩相等(反之未必成立)。
(3)极大无关组求解步骤
-
将向量组按列构成矩阵 A A A;
-
对 A A A 作初等行变换化为行最简形;
-
非零行的首非零元所在列对应的原向量,即为极大无关组。
操作注记:
- 行向量组可转置为列向量组求解,或作初等列变换(效果等价);
- 求解时仅能单一方向变换(仅行/仅列),不可混合变换;
- 秩唯一,极大无关组不唯一。
五、等价矩阵 vs 等价向量组
1. 等价矩阵
定义 :矩阵 A A A 经有限次初等变换(行 / 列变换)可化为 B B B,则 A A A 与 B B B 等价,记为 A ≅ B A \cong B A≅B。
核心条件:
-
同型:行数、列数分别相等(初等变换不改变维度);
-
秩相等 : r ( A ) = r ( B ) r(A) = r(B) r(A)=r(B)(等价的充要条件)。
本质:反映 "初等变换下的结构相似",即秩结构相同,可互相转化,但行 / 列向量组的生成能力未必相同。
A , B A,B A,B 同型时, A ≅ B ⟺ r ( A ) = r ( B ) ⟺ P A Q = B A \cong B\iff r(A)=r(B)\iff PAQ=B A≅B⟺r(A)=r(B)⟺PAQ=B( P , Q P,Q P,Q 是可逆矩阵)
2. 等价向量组
定义 :向量组 ( I ) = { α 1 , . . . , α m } (I) = \{\boldsymbol{\alpha}_1, ..., \boldsymbol{\alpha}_m\} (I)={α1,...,αm} 与 ( I I ) = { β 1 , . . . , β k } (II) = \{\boldsymbol{\beta}_1, ..., \boldsymbol{\beta}_k\} (II)={β1,...,βk} 互相线性表示,记作 ( I ) ≅ ( I I ) (I) \cong (II) (I)≅(II)。
充要条件 : r ( I ) = r ( I I ) r(I)=r(II) r(I)=r(II),且可单方向表示。即 r ( I ) = r ( I I ) = r ( I , I I ) r(I)=r(II)=r(I,II) r(I)=r(II)=r(I,II)
本质:反映 "生成能力的信息等价",即张成空间相同,有效信息维度一致。
等价向量组满足:
- 反身性: ( I ) ≅ ( I ) (I) \cong (I) (I)≅(I);
- 对称性:若 ( I ) ≅ ( I I ) (I) \cong (II) (I)≅(II) ,则 ( I I ) ≅ ( I ) (II) \cong (I) (II)≅(I);
- 传递性:若 ( I ) ≅ ( I I ) , ( I I ) ≅ ( I I I ) (I) \cong (II),(II) \cong (III) (I)≅(II),(II)≅(III),则 ( I ) ≅ ( I I I ) (I) \cong (III) (I)≅(III) .
向量组和它的极大线性无关组是等价向量组。
等价向量组的向量个数不一定相同。
3. 二者区别
矩阵等价针对同型矩阵,标准为初等变换可互化,反映矩阵整体结构的相似性;向量组等价针对同维向量组(可不同个数),标准为双向线性表示,反映向量组生成空间的一致性。
同秩是等价的必要非充分条件,同秩同型矩阵必等价,同秩向量组未必等价。
六、向量空间(数一)
1. 基本概念
n 维向量空间 R n \mathbb{R}^n Rn 中,若 { ε 1 , ... , ε n } \{\boldsymbol{\varepsilon}_1, \dots, \boldsymbol{\varepsilon}_n\} {ε1,...,εn} 线性无关,则任一 α ∈ R n \boldsymbol{\alpha} \in \mathbb{R}^n α∈Rn 可唯一表示为:
α = x 1 ε 1 + ⋯ + x n ε n \boldsymbol{\alpha} = x_1\boldsymbol{\varepsilon}_1 + \dots + x_n\boldsymbol{\varepsilon}_n α=x1ε1+⋯+xnεn
- 基:有序线性无关向量组 { ε 1 , ... , ε n } \{\boldsymbol{\varepsilon}_1, \dots, \boldsymbol{\varepsilon}_n\} {ε1,...,εn};
- 维数:基向量的个数 n n n;
- 坐标: x 1 , ... , x n x_1, \\dots, x_n x1,...,xn(行)或 x 1 , ... , x n T x_1, \\dots, x_n^\mathrm{T} x1,...,xnT(列),即 α \boldsymbol{\alpha} α 在该基下的坐标。
几何理解:二维平面中,任意两个线性无关(不平行)的向量均可作为基,垂直仅是特殊情况。
2. 基变换与坐标变换
(1)基变换与过渡矩阵
设 R n \mathbb{R}^n Rn 的两组基:
-
旧基: B 1 = { ε 1 , . . . , ε n } B_1 = \{\boldsymbol{\varepsilon}_1, ..., \boldsymbol{\varepsilon}_n\} B1={ε1,...,εn};
-
新基: B 2 = { η 1 , . . . , η n } B_2 = \{\boldsymbol{\eta}_1, ..., \boldsymbol{\eta}_n\} B2={η1,...,ηn}。
新基中每个向量可由旧基线性表示:
{ η 1 = p 11 ε 1 + . . . + p n 1 ε n η 2 = p 12 ε 1 + . . . + p n 2 ε n ⋮ η n = p 1 n ε 1 + . . . + p n n ε n \begin{cases} \boldsymbol{\eta}1 = p{11}\boldsymbol{\varepsilon}1 + ... + p{n1}\boldsymbol{\varepsilon}_n \\ \boldsymbol{\eta}2 = p{12}\boldsymbol{\varepsilon}1 + ... + p{n2}\boldsymbol{\varepsilon}_n \\ \vdots \\ \boldsymbol{\eta}n = p{1n}\boldsymbol{\varepsilon}1 + ... + p{nn}\boldsymbol{\varepsilon}_n \end{cases} ⎩ ⎨ ⎧η1=p11ε1+...+pn1εnη2=p12ε1+...+pn2εn⋮ηn=p1nε1+...+pnnεn
矩阵形式(基变换公式):
( η 1 , . . . , η n ) = ( ε 1 , . . . , ε n ) P (\boldsymbol{\eta}_1, ..., \boldsymbol{\eta}_n) = (\boldsymbol{\varepsilon}_1, ..., \boldsymbol{\varepsilon}_n) P (η1,...,ηn)=(ε1,...,εn)P
其中 P = ( p i j ) n × n P = (p_{ij})_{n×n} P=(pij)n×n 称为从旧基 B 1 B_1 B1 到新基 B 2 B_2 B2 的过渡矩阵(必可逆,因新基线性无关)。
(2)坐标变换公式
设 α \boldsymbol{\alpha} α 在旧基 B 1 B_1 B1 下的坐标为 X = ( x 1 , . . . , x n ) T \boldsymbol{X} = (x_1, ..., x_n)^T X=(x1,...,xn)T,即 α = ( ε 1 , . . . , ε n ) X \boldsymbol{\alpha} = (\boldsymbol{\varepsilon}_1, ..., \boldsymbol{\varepsilon}_n) \boldsymbol{X} α=(ε1,...,εn)X;在新基 B 2 B_2 B2 下的坐标为 Y = ( y 1 , . . . , y n ) T \boldsymbol{Y} = (y_1, ..., y_n)^T Y=(y1,...,yn)T,即 α = ( η 1 , . . . , η n ) Y \boldsymbol{\alpha} = (\boldsymbol{\eta}_1, ..., \boldsymbol{\eta}_n) \boldsymbol{Y} α=(η1,...,ηn)Y。
结合基变换公式,得:
( ε 1 , . . . , ε n ) X = ( ε 1 , . . . , ε n ) P Y (\boldsymbol{\varepsilon}_1, ..., \boldsymbol{\varepsilon}_n) \boldsymbol{X} = (\boldsymbol{\varepsilon}_1, ..., \boldsymbol{\varepsilon}_n) P \boldsymbol{Y} (ε1,...,εn)X=(ε1,...,εn)PY
因旧基矩阵可逆,故坐标变换公式:
X = P Y 或 Y = P − 1 X \boldsymbol{X} = P \boldsymbol{Y} \quad \text{或} \quad \boldsymbol{Y} = P^{-1} \boldsymbol{X} X=PY或Y=P−1X
(旧坐标求新坐标用 Y = P − 1 X \boldsymbol{Y} = P^{-1} \boldsymbol{X} Y=P−1X;新坐标求旧坐标用 X = P Y \boldsymbol{X} = P \boldsymbol{Y} X=PY)。
(3)施密特正交化(规范正交基构造)
对线性无关向量组 { α 1 , . . . , α r } \{\boldsymbol{\alpha}_1, ..., \boldsymbol{\alpha}_r\} {α1,...,αr},构造正交向量组 { β 1 , . . . , β r } \{\boldsymbol{\beta}_1, ..., \boldsymbol{\beta}_r\} {β1,...,βr}:
- 步骤1:正交化
β 1 = α 1 β 2 = α 2 − ⟨ α 2 , β 1 ⟩ ⟨ β 1 , β 1 ⟩ β 1 ⋮ β r = α r − ∑ i = 1 r − 1 ⟨ α r , β i ⟩ ⟨ β i , β i ⟩ β i \boldsymbol{\beta}_1 = \boldsymbol{\alpha}_1\\ \boldsymbol{\beta}_2 = \boldsymbol{\alpha}_2 - \frac{\langle \boldsymbol{\alpha}_2, \boldsymbol{\beta}_1 \rangle}{\langle \boldsymbol{\beta}_1, \boldsymbol{\beta}_1 \rangle} \boldsymbol{\beta}_1\\ \vdots\\ \boldsymbol{\beta}_r = \boldsymbol{\alpha}r - \sum{i=1}^{r-1} \frac{\langle \boldsymbol{\alpha}_r, \boldsymbol{\beta}_i \rangle}{\langle \boldsymbol{\beta}_i, \boldsymbol{\beta}_i \rangle} \boldsymbol{\beta}_i\\ β1=α1β2=α2−⟨β1,β1⟩⟨α2,β1⟩β1⋮βr=αr−i=1∑r−1⟨βi,βi⟩⟨αr,βi⟩βi
- 步骤2:单位化
γ i = β i ∥ β i ∥ ( i = 1 , . . . , r ) \boldsymbol{\gamma}_i = \frac{\boldsymbol{\beta}_i}{\|\boldsymbol{\beta}_i\|} \quad (i=1,...,r) γi=∥βi∥βi(i=1,...,r)
则 { γ 1 , . . . , γ r } \{\boldsymbol{\gamma}_1, ..., \boldsymbol{\gamma}_r\} {γ1,...,γr} 为规范正交组。
-
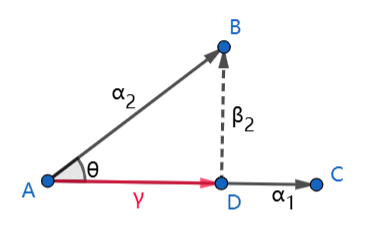
几何解释
以 β 2 \beta_2 β2 为例,从向量 α 2 \alpha_2 α2 向向量 α 1 \alpha_1 α1 作垂线,得向量 r r r ,则向量 r r r 的长度为 ∣ ∣ α 2 ∣ ∣ cos θ ||\alpha_2||\cos{\theta} ∣∣α2∣∣cosθ,方向为 α 1 ∣ ∣ α 1 ∣ ∣ \frac{\alpha_1}{||\alpha_1||} ∣∣α1∣∣α1,故向量
r = ∣ ∣ α 2 ∣ ∣ cos θ ⋅ α 1 ∣ ∣ α 1 ∣ ∣ = ∣ ∣ α 1 ∣ ∣ ⋅ ∣ ∣ α 2 ∣ ∣ cos θ ⋅ α 1 ∣ ∣ α 1 ∣ ∣ 2 = ⟨ α 1 , α 2 ⟩ ⋅ α 1 ⟨ α 1 , α 1 ⟩ = ⟨ α 1 , α 2 ⟩ ⟨ α 1 , α 1 ⟩ ⋅ α 1 = ⟨ β 1 , α 2 ⟩ ⟨ β 1 , β 1 ⟩ ⋅ β 1 \begin{align*} r&=||\alpha_2||\cos{\theta}\cdot\frac{\alpha_1}{||\alpha_1||}\\&= ||\alpha_1||\cdot||\alpha_2||\cos{\theta}\cdot\frac{\alpha_1}{||\alpha_1||^2}\\&= \langle \alpha_1, \alpha_2 \rangle\cdot\frac{\alpha_1}{\langle \alpha_1, \alpha_1 \rangle}\\&= \frac{\langle \alpha_1, \alpha_2 \rangle}{\langle \alpha_1, \alpha_1 \rangle}\cdot\alpha_1\\&= \frac{\langle \beta_1, \alpha_2 \rangle}{\langle \beta_1, \beta_1 \rangle}\cdot\beta_1 \end{align*} r=∣∣α2∣∣cosθ⋅∣∣α1∣∣α1=∣∣α1∣∣⋅∣∣α2∣∣cosθ⋅∣∣α1∣∣2α1=⟨α1,α2⟩⋅⟨α1,α1⟩α1=⟨α1,α1⟩⟨α1,α2⟩⋅α1=⟨β1,β1⟩⟨β1,α2⟩⋅β1
又三角形法则 β 2 = α 2 − r = α 2 − ⟨ β 1 , α 2 ⟩ ⟨ β 1 , β 1 ⟩ ⋅ β 1 \beta_2=\alpha_2-r=\alpha_2-\frac{\langle \beta_1, \alpha_2 \rangle}{\langle \beta_1, \beta_1 \rangle}\cdot\beta_1 β2=α2−r=α2−⟨β1,β1⟩⟨β1,α2⟩⋅β1