文章目录
-
- 3dg中使用的图形学一些细节
-
- 3dgs中涉及的坐标系变换
- 一些普及知识
- 投影变化矩阵由来
-
- 变换到NDT的范围为-1,1,相机坐标系是右手坐标系(x右侧,y轴上侧,z轴指向与相机看向方向相反(物体的z轴坐标为负数))
- 变换到NDT的范围为0,1,3dgs中定义投影矩阵所使用的
- [透射投影变换后NDT中的齐次坐标 ( x c , y c , z c , w c ) (x_c, y_c, z_c, w_c) (xc,yc,zc,wc)中的 w c w_c wc都要求是正值原因](#透射投影变换后NDT中的齐次坐标 ( x c , y c , z c , w c ) (x_c, y_c, z_c, w_c) (xc,yc,zc,wc)中的 w c w_c wc都要求是正值原因)
- 3dgs整个项目的系统流程
3dg中使用的图形学一些细节
3dgs中涉及的坐标系变换
完整的 3DGS 渲染流程是:
世界空间 → world_view_transform → 相机空间
相机空间 → projection_matrix → 裁剪空间
裁剪空间 → 透视除法 → 标准化设备坐标
NDC → 视口变换 → 屏幕像素坐标
#在camera.py文件主要存储了三种主要变换矩阵
#W2C(世界坐标系到相机坐标系的变换)
self.world_view_transform = torch.tensor(getWorld2View2(R, T, trans, scale)).transpose(0, 1).cuda()
#C2裁剪空间(世界坐标系到裁剪空间坐标系的变换)
self.projection_matrix = getProjectionMatrix(znear=self.znear, zfar=self.zfar, fovX=self.FoVx, fovY=self.FoVy).transpose(0,1).cuda()
#W2裁剪空间
self.full_proj_transform = (self.world_view_transform.unsqueeze(0).bmm(self.projection_matrix.unsqueeze(0))).squeeze(0)一些普及知识
-
OpenGL(经典右手系) :相机看向 -z 方向 。在观察空间中,近平面位于 z = − n z = -n z=−n,远平面位于 z = − f z = -f z=−f( n , f > 0 n, f > 0 n,f>0)。
NDC 的 z 范围传统是 -1, 1,映射后近平面对应-1,远平面对应 1。
-
Direct3D(左手系) :相机看向 +z 方向 。在观察空间中,近平面在 z = n z = n z=n,远平面在 z = f z = f z=f( n , f > 0 n, f > 0 n,f>0)。
NDC 的 z 范围是 0, 1,映射后近平面对应 0,远平面对应 1。(3dgs中使用的)
投影变化矩阵由来
分别由透视投影矩阵(压缩成为长方体)和正交投影矩阵(它通常将一个定义在三维空间中的长方体视锥体(View Frustum由 l e f t , r i g h t , b o t t o m , t o p , n e a r , f a r left, right, bottom, top, near, far left,right,bottom,top,near,far定义)变换为一个标准立方体),通常会为限制z在(0,w)或者(-w,w)范围里的长方体。
下面出现的参数含义说明:
- l , r l, r l,r:左 (Left) 和 右 (Right) 边界( x x x 轴,近平面上的坐标值)。
- b , t b, t b,t:下 (Bottom) 和 上 (Top) 边界( y y y 轴,近平面上的坐标值)。
- n , f n, f n,f:近 (Near) 和 远 (Far) 边界( z z z 轴)。
一般NDT坐标系(下面两种情况,下面两种情况的相机坐标系有区别)就是左手坐标系(x指向右侧,y轴指向上面,z轴指向相机看向的地方(也就是相机看到的物体的z轴坐标都是正的))
变换到NDT的范围为-1,1,相机坐标系是右手坐标系(x右侧,y轴上侧,z轴指向与相机看向方向相反(物体的z轴坐标为负数))
透射投影矩阵如下:
P = n 0 0 0 0 n 0 0 0 0 n + f − f n 0 0 1 0 P = \begin{bmatrix} n & 0 & 0 & 0 \\ 0 & n & 0 & 0 \\ 0 & 0 & n + f & -fn \\ 0 & 0 & 1 & 0 \end{bmatrix} P= n0000n0000n+f100−fn0
正交投影矩阵如下:T矩阵
M o r t h o = S ⋅ T = 2 r − l 0 0 − r + l r − l 0 2 t − b 0 − t + b t − b 0 0 2 n − f − n + f n − f 0 0 0 1 M_{ortho} = S \cdot T = \begin{bmatrix} \frac{2}{r-l} & 0 & 0 & -\frac{r+l}{r-l} \\ 0 & \frac{2}{t-b} & 0 & -\frac{t+b}{t-b} \\ 0 & 0 & \frac{2}{n-f} & -\frac{n+f}{n-f} \\ 0 & 0 & 0 & 1 \end{bmatrix} Mortho=S⋅T= r−l20000t−b20000n−f20−r−lr+l−t−bt+b−n−fn+f1 ,
其中平移矩阵 ( T T T):
其目的是将长方体的中心点 ( r + l 2 , t + b 2 , n + f 2 ) (\frac{r+l}{2}, \frac{t+b}{2}, \frac{n+f}{2}) (2r+l,2t+b,2n+f) 移动到原点 ( 0 , 0 , 0 ) (0,0,0) (0,0,0)。
T = 1 0 0 − r + l 2 0 1 0 − t + b 2 0 0 1 − n + f 2 0 0 0 1 T = \begin{bmatrix} 1 & 0 & 0 & -\frac{r+l}{2} \\ 0 & 1 & 0 & -\frac{t+b}{2} \\ 0 & 0 & 1 & -\frac{n+f}{2} \\ 0 & 0 & 0 & 1 \end{bmatrix} T= 100001000010−2r+l−2t+b−2n+f1
缩放矩阵 ( S S S):
其目的是将长方体的宽度(从 l l l 到 r r r)、高度(从 b b b 到 t t t)以及深度(从 f f f 到 n n n)缩放到长度为 2 2 2。
S = 2 r − l 0 0 0 0 2 t − b 0 0 0 0 2 n − f 0 0 0 0 1 S = \begin{bmatrix} \frac{2}{r-l} & 0 & 0 & 0 \\ 0 & \frac{2}{t-b} & 0 & 0 \\ 0 & 0 & \frac{2}{n-f} & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix} S= r−l20000t−b20000n−f200001
完整的透射投影矩阵 :
M persp = M o r t h o P = 2 n r − l 0 r + l r − l 0 0 2 n t − b t + b t − b 0 0 0 − f + n f − n − 2 f n f − n 0 0 − 1 0 M_{\text{persp}} =M_{ortho}P= \begin{bmatrix} \frac{2n}{r-l} & 0 & \frac{r+l}{r-l} & 0 \\ 0 & \frac{2n}{t-b} & \frac{t+b}{t-b} & 0 \\ 0 & 0 & -\frac{f+n}{f-n} & -\frac{2fn}{f-n} \\ 0 & 0 & -1 & 0 \end{bmatrix} Mpersp=MorthoP= r−l2n0000t−b2n00r−lr+lt−bt+b−f−nf+n−100−f−n2fn0
这里 n , f > 0 n,f>0 n,f>0, z c z_c zc 为负,近平面 z c = − n z_c=-n zc=−n,远平面 z c = − f z_c=-f zc=−f。
为了对称投影( l = − r , b = − t l=-r, b=-t l=−r,b=−t)简化成:
M persp = n r 0 0 0 0 n t 0 0 0 0 − f + n f − n − 2 f n f − n 0 0 − 1 0 M_{\text{persp}} = \begin{bmatrix} \frac{n}{r} & 0 & 0 & 0 \\ 0 & \frac{n}{t} & 0 & 0 \\ 0 & 0 & -\frac{f+n}{f-n} & -\frac{2fn}{f-n} \\ 0 & 0 & -1 & 0 \end{bmatrix} Mpersp= rn0000tn0000−f−nf+n−100−f−n2fn0
其中 r = n ⋅ tan ( θ h / 2 ) , t = n ⋅ tan ( θ v / 2 ) r = n \cdot \tan(\theta_h/2),\ t = n \cdot \tan(\theta_v/2) r=n⋅tan(θh/2), t=n⋅tan(θv/2)。
变换到NDT的范围为0,1,3dgs中定义投影矩阵所使用的
#在3dgs中计算投影矩阵就是如此
def getProjectionMatrix(znear, zfar, fovX, fovY):
tanHalfFovY = math.tan((fovY / 2))
tanHalfFovX = math.tan((fovX / 2))
top = tanHalfFovY * znear
bottom = -top
right = tanHalfFovX * znear
left = -right
P = torch.zeros(4, 4)
z_sign = 1.0
P[0, 0] = 2.0 * znear / (right - left)
P[1, 1] = 2.0 * znear / (top - bottom)
P[0, 2] = (right + left) / (right - left)
P[1, 2] = (top + bottom) / (top - bottom)
P[3, 2] = z_sign
P[2, 2] = z_sign * zfar / (zfar - znear)
P[2, 3] = -(zfar * znear) / (zfar - znear)
return P当 NDC(归一化设备坐标)范围为 0 , 1 0, 1 0,1 (常见于 DirectX, Metal, Vulkan)且使用左手坐标系时,正交投影矩阵的形式会发生变化。
在这种情况下,我们需要将视锥体的范围映射为:
- x : l , r → − 1 , 1 x: l, r \to -1, 1 x:l,r→−1,1
- y : b , t → − 1 , 1 y: b, t \to -1, 1 y:b,t→−1,1
- z : n , f → 0 , 1 z: n, f \to 0, 1 z:n,f→0,1(注意这里 z z z 的范围和起始点)
平移矩阵 ( T T T)
平移矩阵将 x x x 和 y y y 的中心移到原点,并将 z z z 的起点线(Near 平面)移到 0。
T = 1 0 0 − r + l 2 0 1 0 − t + b 2 0 0 1 − n 0 0 0 1 T = \begin{bmatrix} 1 & 0 & 0 & -\frac{r+l}{2} \\ 0 & 1 & 0 & -\frac{t+b}{2} \\ 0 & 0 & 1 & -n \\ 0 & 0 & 0 & 1 \end{bmatrix} T= 100001000010−2r+l−2t+b−n1
缩放矩阵 ( S S S)
缩放矩阵将 x , y x, y x,y 的区间长度缩放为 2 2 2,将 z z z 的区间长度降为 1 1 1。
S = 2 r − l 0 0 0 0 2 t − b 0 0 0 0 1 f − n 0 0 0 0 1 S = \begin{bmatrix} \frac{2}{r-l} & 0 & 0 & 0 \\ 0 & \frac{2}{t-b} & 0 & 0 \\ 0 & 0 & \frac{1}{f-n} & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix} S= r−l20000t−b20000f−n100001
最终的正交投影矩阵 ( M o r t h o M_{ortho} Mortho):
将两者相乘 ( M = S ⋅ T M = S \cdot T M=S⋅T),得到适用于 左手系且 z ∈ 0 , 1 z \in 0, 1 z∈0,1 的矩阵:
M o r t h o = 2 r − l 0 0 − r + l r − l 0 2 t − b 0 − t + b t − b 0 0 1 f − n − n f − n 0 0 0 1 M_{ortho} = \begin{bmatrix} \frac{2}{r-l} & 0 & 0 & -\frac{r+l}{r-l} \\ 0 & \frac{2}{t-b} & 0 & -\frac{t+b}{t-b} \\ 0 & 0 & \frac{1}{f-n} & -\frac{n}{f-n} \\ 0 & 0 & 0 & 1 \end{bmatrix} Mortho= r−l20000t−b20000f−n10−r−lr+l−t−bt+b−f−nn1
左手系的正交投影矩阵与标准 OpenGL 形式(右手系, − 1 , 1 -1, 1 −1,1)的主要区别:
- Z 轴缩放系数:
- 标准 OpenGL 是 2 f − n \frac{2}{f-n} f−n2(因为长度是 2 2 2)。
- 此处是 1 f − n \frac{1}{f-n} f−n1(因为长度是 1 1 1)。
- Z 轴平移项:
- 标准 OpenGL 是 − f + n f − n -\frac{f+n}{f-n} −f−nf+n。
- 此处是 − n f − n -\frac{n}{f-n} −f−nn。
- 符号差异(左手系 vs 右手系):
- 在右手系中,相机通常看向 − z -z −z 方向,因此 z z z 的映射公式会有负号。
- 在左手系中,相机看向 + z +z +z 方向,所以 z z z 项( M 33 M_{33} M33)是正值 ( 1 f − n \frac{1}{f-n} f−n1)。
完整的透射投影矩阵为**(3dgs中的透射投影矩阵定义)**:
推导目标:
在左手系看向 +z 时,投影变换后我们希望:
-
近平面 z = n z = n z=n 映射到 NDC 的 z ndc = 0 z_{\text{ndc}} = 0 zndc=0(如果范围是0,1)。
-
远平面 z = f z = f z=f 映射到 NDC 的 z ndc = 1 z_{\text{ndc}} = 1 zndc=1。
-
对于 x 方向:在近平面 z = n z = n z=n 处, x = l x = l x=l 映射到 x ndc = − 1 x_{\text{ndc}} = -1 xndc=−1, x = r x = r x=r 映射到 x ndc = 1 x_{\text{ndc}} = 1 xndc=1。
-
对于 y 方向:在近平面 z = n z = n z=n 处, y = b y = b y=b 映射到 y ndc = − 1 y_{\text{ndc}} = -1 yndc=−1, y = t y = t y=t 映射到 y ndc = 1 y_{\text{ndc}} = 1 yndc=1。
M lh = 2 n r − l 0 − r + l r − l 0 0 2 n t − b − t + b t − b 0 0 0 f f − n − f n f − n 0 0 1 0 M_{\text{lh}} = \begin{bmatrix} \frac{2n}{r-l} & 0 & -\frac{r+l}{r-l} & 0 \\ 0 & \frac{2n}{t-b} & -\frac{t+b}{t-b} & 0 \\ 0 & 0 & \frac{f}{f-n} & -\frac{f n}{f-n} \\ 0 & 0 & 1 & 0 \end{bmatrix} Mlh= r−l2n0000t−b2n00−r−lr+l−t−bt+bf−nf100−f−nfn0
对称视锥简化:
若 l = − r l = -r l=−r, b = − t b = -t b=−t,则:
M lh-sym = n r 0 0 0 0 n t 0 0 0 0 f f − n − f n f − n 0 0 1 0 M_{\text{lh-sym}} = \begin{bmatrix} \frac{n}{r} & 0 & 0 & 0 \\ 0 & \frac{n}{t} & 0 & 0 \\ 0 & 0 & \frac{f}{f-n} & -\frac{f n}{f-n} \\ 0 & 0 & 1 & 0 \end{bmatrix} Mlh-sym= rn0000tn0000f−nf100−f−nfn0
其中 r = n ⋅ tan ( θ h / 2 ) r = n \cdot \tan(\theta_h/2) r=n⋅tan(θh/2), t = n ⋅ tan ( θ v / 2 ) t = n \cdot \tan(\theta_v/2) t=n⋅tan(θv/2)。
左手系(看向 +z)的透视投影矩阵与右手系(看向-z)的主要区别:
-
第三行深度系数变为 f f − n \frac{f}{f-n} f−nf 和 − f n f − n -\frac{f n}{f-n} −f−nfn(映射到0,1)。
-
x 和 y 的偏移项(第三列的第一行和第二行)符号不同。
-
第四行保持 ( 0 , 0 , 1 , 0 ) (0,0,1,0) (0,0,1,0),将观察空间 z 存入 w 用于透视除法。
透射投影变换后NDT中的齐次坐标 ( x c , y c , z c , w c ) (x_c, y_c, z_c, w_c) (xc,yc,zc,wc)中的 w c w_c wc都要求是正值原因
无论相机坐标系是左手还是右手,最后转换到NDT坐标系都是左手坐标系,所以最后的齐次坐标 ( x c , y c , z c , w c ) (x_c, y_c, z_c, w_c) (xc,yc,zc,wc)中的 w c w_c wc都要求是正值。
主要有以下几个核心原因:
- 透视除法的数学要求 (防止图像翻转)
透视投影的最后一步是透视除法 :
x n d c = x c w c , y n d c = y c w c x_{ndc} = \frac{x_c}{w_c}, \quad y_{ndc} = \frac{y_c}{w_c} xndc=wcxc,yndc=wcyc
- 如果 w c > 0 w_c > 0 wc>0 :物体的相对位置保持不变。原本在右边的点( x c > 0 x_c > 0 xc>0)除以正数后仍然在右边。
- 如果 w c < 0 w_c < 0 wc<0 :这会导致镜像翻转。原本在屏幕右侧的点会跑到左侧,原本在上方的点会跑到下方。
- 如果 w c = 0 w_c = 0 wc=0:会产生除以零的错误。这通常发生在点正好位于相机坐标系的原点(针孔位置)时。
- 裁剪(Clipping)的需要
在 GPU 的硬件流水线中,裁剪是在"裁剪空间"(Clip Space)进行的。裁剪的准则是:
− w c ≤ x c ≤ w c -w_c \leq x_c \leq w_c −wc≤xc≤wc
− w c ≤ y c ≤ w c -w_c \leq y_c \leq w_c −wc≤yc≤wc
− w c ≤ z c ≤ w c -w_c \leq z_c \leq w_c −wc≤zc≤wc
如果 w c w_c wc 是一个负数(比如 w c = − 5 w_c = -5 wc=−5),那么这个不等式就变成了:
5 ≤ x c ≤ − 5 5 \leq x_c \leq -5 5≤xc≤−5
这在数学上是不可能的(一个数不可能既大于 5 又小于 -5) 。因此,如果 w c ≤ 0 w_c \leq 0 wc≤0,GPU 会认为该点不在视锥体内,从而将其直接剔除(Cull),不进行渲染。 - w w w 代表了"深度的物理意义"
无论是在右手系还是左手系,投影矩阵的设计目标都是让 w c w_c wc 承载相机空间下的深度信息。
- 在右手系中 :相机看向 − Z -Z −Z,所以物体在前方时的 z v z_v zv 是负值 。投影矩阵最后一行通常是 0 , 0 , − 1 , 0 0, 0, -1, 0 0,0,−1,0,计算得到 w c = − z v w_c = -z_v wc=−zv。因为 z v < 0 z_v < 0 zv<0,所以 w c w_c wc 变成了正值。
- 在左手系中 :相机看向 + Z +Z +Z,物体在前方的 z v z_v zv 是正值 。投影矩阵最后一行是 0 , 0 , 1 , 0 0, 0, 1, 0 0,0,1,0,计算得到 w c = z v w_c = z_v wc=zv。所以 w c w_c wc 也是正值。
总结: w c > 0 w_c > 0 wc>0 实际上就是"物体在相机前方"的数学表达。
在渲染管线中:
- w > 0 w > 0 w>0 :意味着点在相机前方,且能够通过裁剪测试,正确投影在屏幕上。
- w < 0 w < 0 w<0 :意味着点在相机后方。如果不剔除,它会产生一个倒立且镜像的虚影(类似于通过针孔在相反方向形成的像),这在逻辑上是错误的。
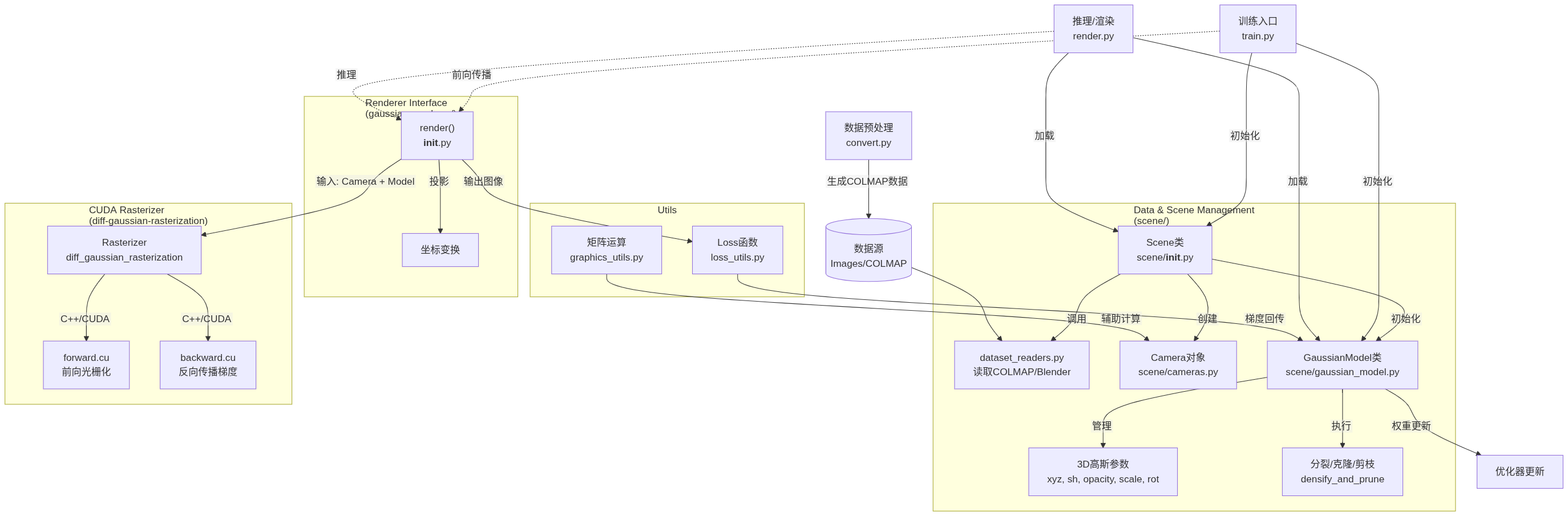
3dgs整个项目的系统流程
flowchart TD
%% 入口脚本层
DataPrep["数据预处理<br/>convert.py"] -->|"生成COLMAP数据"| Dataset[("数据源<br/>Images/COLMAP")]
Train["训练入口<br/>train.py"]
Render["推理/渲染<br/>render.py"]
%% 场景与数据层
subgraph SceneMgmt ["Data & Scene Management (scene/)"]
Scene["Scene类<br/>scene/__init__.py"]
Readers["dataset_readers.py<br/>读取COLMAP/Blender"]
Cam["Camera对象<br/>scene/cameras.py"]
Model["GaussianModel类<br/>scene/gaussian_model.py"]
Param["3D高斯参数<br/>xyz, sh, opacity, scale, rot"]
Densify["分裂/克隆/剪枝<br/>densify_and_prune"]
Scene -->|"调用"| Readers
Scene -->|"创建"| Cam
Scene -->|"初始化"| Model
Model -->|"管理"| Param
Model -->|"执行"| Densify
end
Dataset --> Readers
Train -->|"初始化"| Scene
Train -->|"初始化"| Model
Render -->|"加载"| Scene
Render -->|"加载"| Model
%% 渲染与计算层
subgraph RendererIntf ["Renderer Interface (gaussian_renderer/)"]
RenderFunc["render()<br/>__init__.py"]
Projection["坐标变换"]
RenderFunc -->|"投影"| Projection
end
Train -.->|"前向传播"| RenderFunc
Render -.->|"推理"| RenderFunc
%% 底层光栅化引擎
subgraph CUDARaster ["CUDA Rasterizer (diff-gaussian-rasterization)"]
Rasterizer["Rasterizer<br/>diff_gaussian_rasterization"]
Forward["forward.cu<br/>前向光栅化"]
Backward["backward.cu<br/>反向传播梯度"]
Rasterizer -->|"C++/CUDA"| Forward
Rasterizer -->|"C++/CUDA"| Backward
end
RenderFunc -->|"输入: Camera + Model"| Rasterizer
%% 工具与训练循环
subgraph Utils ["Utils"]
Loss["Loss函数<br/>loss_utils.py"]
Graphics["矩阵运算<br/>graphics_utils.py"]
end
Optimizer["优化器更新"]
RenderFunc -->|"输出图像"| Loss
Loss -->|"梯度回传"| Model
Model -->|"权重更新"| Optimizer
Graphics -->|"辅助计算"| Cam