学习路线:
第一阶段:传统视觉跟踪 ✅ 已完成
↓
第二阶段:深度学习目标检测(YOLO)
↓
第三阶段:模型优化与加速(TensorRT)
↓
第四阶段:Jetson硬件部署
↓
第五阶段:完整机器人AI系统
项目一、基于Gazebo的ROS + OpenCV 实时颜色跟踪机器人
✅ ROS与OpenCV集成
✅ 颜色检测算法实现
✅ 视觉伺服控制逻辑
✅ Gazebo仿真环境配置
✅ 机器人硬件接口调用
项目流程
循环开始
↓
获取图像 → 检测红色 → 找到最大区域
↓
计算目标中心 → 计算误差(error_x)
↓
计算角速度:angular.z = -error_x / 300
↓
计算线速度:linear.x = max_speed × (1 - 面积占比×5)
↓
限制速度范围 → 发布到 /cmd_vel
↓
显示图像和调试信息
↓
检查退出键
启动
启动 launch 文件
↓
启动 Gazebo + TurtleBot3(在空世界中)
↓
生成红色球体(在机器人前方2米,离地0.5米)
↓
启动你的跟踪节点(订阅摄像头数据)
↓
Gazebo摄像头发布图像 → 你的节点处理 → 发布控制指令 → 机器人移动具体步骤:
第一步:创建一个简单ROS节点,用来显示摄像头图像
1创建视觉功能包
1.1功能包包含代码、配置文件、启动文件
2、具体操作
# 进入工作空间源代码目录
cd ~/turtle_ws/src
# 创建功能包,注意依赖项多了roscpp(C++库)和image_transport
catkin_create_pkg robot_vision_cpp roscpp cv_bridge sensor_msgs image_transport
# 进入包目录
cd robot_vision_cpp
# C++源文件通常放在src目录下
mkdir src
# 在src目录下创建show_image.cpp
touch src/show_image.cpp打开show_image.cpp
// 包含必要的头文件
#include <ros/ros.h> // ROS C++核心库
#include <image_transport/image_transport.h> // 高效传输图像
#include <cv_bridge/cv_bridge.h> // ROS和OpenCV之间的转换器
#include <opencv2/highgui/highgui.hpp> // OpenCV显示窗口功能
#include <opencv2/imgproc/imgproc.hpp> // OpenCV图像处理功能(后续会用)
// 定义一个类来管理我们的图像查看器
class ImageViewer
{
private:
ros::NodeHandle nh_; // ROS节点句柄,与ROS系统通信
image_transport::ImageTransport it_; // 图像传输对象,高效处理图像
image_transport::Subscriber image_sub_; // 图像订阅者
// 回调函数:当收到新图像时自动调用
void imageCallback(const sensor_msgs::ImageConstPtr& msg)
{
try
{
// 将ROS图像消息转换为OpenCV格式
// 使用toCvCopy()创建图像的副本,这样我们可以安全地修改它
// "bgr8"表示颜色编码:蓝-绿-红,每个通道8位
cv_bridge::CvImagePtr cv_ptr = cv_bridge::toCvCopy(msg, "bgr8");
// 现在cv_ptr->image就是OpenCV的Mat对象,可以操作了
// 显示图像
cv::imshow("Camera View", cv_ptr->image);
// 等待10毫秒,并检查是否按了'q'键
// 如果不调用waitKey,窗口不会更新
char key = (char)cv::waitKey(10);
if (key == 'q' || key == 27) // 27是ESC键的ASCII码
{
ROS_INFO("用户按了退出键,关闭节点");
ros::shutdown(); // 优雅地关闭ROS节点
}
}
catch (cv_bridge::Exception& e)
{
// 如果转换失败,打印错误信息
ROS_ERROR("cv_bridge异常: %s", e.what());
return;
}
}
public:
// 构造函数:初始化节点
ImageViewer() : it_(nh_)
{
// 打印启动信息
ROS_INFO("🟡 正在启动C++图像查看节点...");
// 创建图像订阅者
// 参数1:订阅的话题名
// 参数2:队列大小(缓存的消息数)
// 参数3:回调函数,使用boost::bind绑定到当前对象的imageCallback方法
// 参数4:this指针,告诉ROS回调函数属于哪个对象
image_sub_ = it_.subscribe("/camera/image_raw", 1,
&ImageViewer::imageCallback, this);
// 创建OpenCV显示窗口
cv::namedWindow("Camera View", cv::WINDOW_AUTOSIZE);
ROS_INFO("🟢 节点已启动,等待图像数据...");
ROS_INFO(" 话题: /camera/image_raw");
ROS_INFO(" 按'q'或ESC键退出");
}
// 析构函数:节点关闭时自动调用
~ImageViewer()
{
// 关闭OpenCV窗口
cv::destroyWindow("Camera View");
ROS_INFO("节点关闭");
}
};
// 主函数:程序入口
int main(int argc, char** argv)
{
// 初始化ROS节点
// 参数1:命令行参数个数
// 参数2:命令行参数数组
// 参数3:节点名,会显示在rosnode list中
ros::init(argc, argv, "image_viewer_cpp");
// 创建ImageViewer对象
ImageViewer viewer;
// ros::spin()进入循环,等待回调函数被调用
// 它会一直运行,直到收到关闭信号(如Ctrl+C或ros::shutdown())
ros::spin();
return 0;
}3、配置编译系统
CMakelist.txt
## 依赖项设置(通常在文件开头)
find_package(catkin REQUIRED COMPONENTS
roscpp
cv_bridge
sensor_msgs
image_transport
)
## 找到OpenCV(需要单独声明)
find_package(OpenCV REQUIRED)
## 包含目录设置
include_directories(
${catkin_INCLUDE_DIRS}
${OpenCV_INCLUDE_DIRS}
)
## 声明我们要生成的可执行文件
## 格式:add_executable(可执行文件名 源代码文件)
add_executable(show_image_cpp src/show_image.cpp)
## 链接库:告诉编译器需要哪些库文件
target_link_libraries(show_image_cpp
${catkin_LIBRARIES}
${OpenCV_LIBRARIES}
)package.xml
<!-- 编译时依赖 -->
<build_depend>roscpp</build_depend>
<build_depend>cv_bridge</build_depend>
<build_depend>sensor_msgs</build_depend>
<build_depend>image_transport</build_depend>
<!-- 运行时依赖 -->
<exec_depend>roscpp</exec_depend>
<exec_depend>cv_bridge</exec_depend>
<exec_depend>sensor_msgs</exec_depend>
<exec_depend>image_transport</exec_depend>4、编译测试
# 回到工作空间根目录
cd ~/turtle_ws
# 编译整个工作空间
catkin_make
# 如果只想编译这个包,可以指定
# catkin_make --pkg robot_vision_cpp测试图像源(生成图像源 代表 虚拟摄像头 获取到的画面)
# 1. 创建脚本文件
mkdir -p ~/ros_test
cd ~/ros_test
# 2. 创建Python脚本
cat > virtual_cam.py << 'EOF'
#!/usr/bin/env python3
import rospy
import numpy as np
import cv2
from sensor_msgs.msg import Image
from cv_bridge import CvBridge
rospy.init_node('virtual_camera')
pub = rospy.Publisher('/camera/image_raw', Image, queue_size=10)
bridge = CvBridge()
rate = rospy.Rate(30) # 30帧/秒
width, height = 640, 480
print("✅ 虚拟摄像头已启动")
print("📡 发布话题: /camera/image_raw")
print("🖼️ 分辨率: 640x480")
frame_count = 0
while not rospy.is_shutdown():
# 创建蓝色渐变背景
img = np.zeros((height, width, 3), dtype=np.uint8)
# 水平渐变:左边蓝色,右边绿色
for col in range(width):
blue_intensity = int((1.0 - col/width) * 255)
green_intensity = int((col/width) * 255)
img[:, col, 0] = blue_intensity # 蓝色通道
img[:, col, 1] = green_intensity # 绿色通道
# 添加一个移动的红色圆形
center_x = int(width/2 + 100 * np.sin(frame_count * 0.1))
center_y = int(height/2 + 80 * np.cos(frame_count * 0.07))
cv2.circle(img, (center_x, center_y), 30, (0, 0, 255), -1) # 红色实心圆
# 添加一个移动的黄色矩形
rect_x = int(100 + 50 * np.sin(frame_count * 0.05))
rect_y = int(100 + 40 * np.cos(frame_count * 0.08))
cv2.rectangle(img, (rect_x, rect_y), (rect_x+60, rect_y+40), (0, 255, 255), 2) # 黄色边框
# 添加说明文字
cv2.putText(img, 'ROS Virtual Camera', (30, 30),
cv2.FONT_HERSHEY_SIMPLEX, 0.8, (255, 255, 255), 2)
cv2.putText(img, 'Red circle and yellow rectangle move', (30, 70),
cv2.FONT_HERSHEY_SIMPLEX, 0.6, (200, 200, 200), 1)
cv2.putText(img, f'Frame: {frame_count}', (30, 100),
cv2.FONT_HERSHEY_SIMPLEX, 0.6, (200, 200, 200), 1)
# 转换为ROS消息
msg = bridge.cv2_to_imgmsg(img, encoding='bgr8')
msg.header.stamp = rospy.Time.now()
msg.header.frame_id = 'virtual_camera'
pub.publish(msg)
frame_count += 1
rate.sleep()
cv2.destroyAllWindows()
EOF
# 3. 设置执行权限
chmod +x virtual_cam.py验证调试
roscore
cd ~/ros_test
python3 virtual_cam.py
# 列出所有话题,应该看到 /camera/image_raw
rostopic list
# 查看图像消息的发布频率
rostopic hz /camera/image_raw
cd ~/turtle_ws
source devel/setup.bash
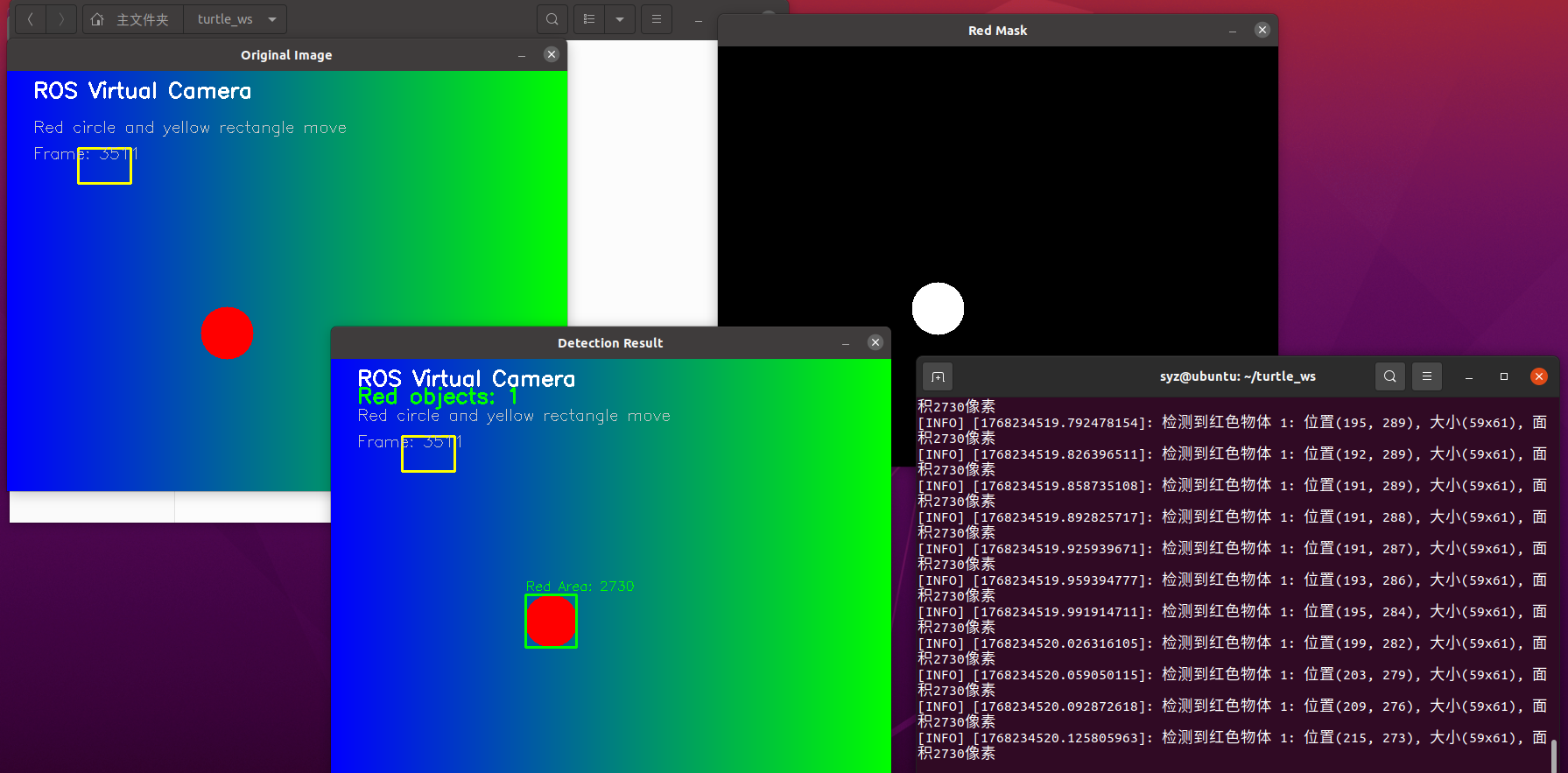
rosrun robot_vision_cpp show_image_cpp第二步、检测图像中的红色物体
-
找到图像中所有红色的区域
-
用绿色框标记出来
-
在终端显示红色物体的位置和大小
cd ~/turtle_ws/src/robot_vision_cpp/src
touch color_detector.cpp// 颜色检测节点 - 检测图像中的红色物体
#include <ros/ros.h>
#include <image_transport/image_transport.h>
#include <cv_bridge/cv_bridge.h>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp> // 新增:图像处理功能class ColorDetector
{
private:
ros::NodeHandle nh_;
image_transport::ImageTransport it_;
image_transport::Subscriber image_sub_;// 新增:用于显示处理结果的窗口 const std::string ORIGINAL_WINDOW = "Original Image"; const std::string MASK_WINDOW = "Red Mask"; const std::string RESULT_WINDOW = "Detection Result"; // 颜色范围定义(HSV颜色空间) // 注意:OpenCV中H的范围是0-179(不是0-360) cv::Scalar lower_red1 = cv::Scalar(0, 100, 100); // 红色范围1(H: 0-10) cv::Scalar upper_red1 = cv::Scalar(10, 255, 255); cv::Scalar lower_red2 = cv::Scalar(160, 100, 100); // 红色范围2(H: 160-180) cv::Scalar upper_red2 = cv::Scalar(180, 255, 255); // 图像回调函数 void imageCallback(const sensor_msgs::ImageConstPtr& msg) { ROS_INFO_ONCE("开始处理图像数据..."); try { // 1. 转换图像格式:ROS消息 -> OpenCV图像 cv_bridge::CvImagePtr cv_ptr = cv_bridge::toCvCopy(msg, "bgr8"); cv::Mat original = cv_ptr->image; // 原始图像 // 2. 转换到HSV颜色空间(对光照变化更鲁棒) cv::Mat hsv_image; cv::cvtColor(original, hsv_image, cv::COLOR_BGR2HSV); // 3. 创建红色掩码(mask) cv::Mat mask1, mask2, red_mask; // 检测红色范围1(0-10度) cv::inRange(hsv_image, lower_red1, upper_red1, mask1); // 检测红色范围2(160-180度) cv::inRange(hsv_image, lower_red2, upper_red2, mask2); // 合并两个范围的掩码 cv::bitwise_or(mask1, mask2, red_mask); // 4. 形态学操作:去除噪声,填充空洞 cv::Mat kernel = cv::getStructuringElement(cv::MORPH_ELLIPSE, cv::Size(5, 5)); cv::morphologyEx(red_mask, red_mask, cv::MORPH_OPEN, kernel); // 开运算:去噪 cv::morphologyEx(red_mask, red_mask, cv::MORPH_CLOSE, kernel); // 闭运算:填充 // 5. 寻找红色区域的轮廓 std::vector<std::vector<cv::Point>> contours; cv::findContours(red_mask, contours, cv::RETR_EXTERNAL, cv::CHAIN_APPROX_SIMPLE); // 6. 在原始图像上标记检测结果 cv::Mat result = original.clone(); // 如果没有找到红色区域 if (contours.empty()) { cv::putText(result, "No red object detected", cv::Point(30, 50), cv::FONT_HERSHEY_SIMPLEX, 0.8, cv::Scalar(0, 0, 255), 2); } else { // 遍历所有轮廓 for (size_t i = 0; i < contours.size(); i++) { // 计算轮廓的面积,忽略太小的噪点 double area = cv::contourArea(contours[i]); if (area < 500) continue; // 面积小于500像素的忽略 // 获取轮廓的外接矩形 cv::Rect boundRect = cv::boundingRect(contours[i]); // 绘制绿色矩形框 cv::rectangle(result, boundRect, cv::Scalar(0, 255, 0), 2); // 在框上方显示面积信息 std::string text = "Red Area: " + std::to_string((int)area); cv::putText(result, text, cv::Point(boundRect.x, boundRect.y - 5), cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(0, 255, 0), 1); // 在终端输出检测信息 ROS_INFO("检测到红色物体 %zu: 位置(%d, %d), 大小(%dx%d), 面积%.0f像素", i+1, boundRect.x, boundRect.y, boundRect.width, boundRect.height, area); } // 显示检测到的物体数量 std::string count_text = "Red objects: " + std::to_string(contours.size()); cv::putText(result, count_text, cv::Point(30, 50), cv::FONT_HERSHEY_SIMPLEX, 0.8, cv::Scalar(0, 255, 0), 2); } // 7. 显示所有窗口 cv::imshow(ORIGINAL_WINDOW, original); cv::imshow(MASK_WINDOW, red_mask); cv::imshow(RESULT_WINDOW, result); // 8. 检查按键 char key = (char)cv::waitKey(10); if (key == 'q' || key == 27) { ROS_INFO("用户按了退出键,关闭节点"); ros::shutdown(); } } catch (cv_bridge::Exception& e) { ROS_ERROR("cv_bridge异常: %s", e.what()); } }public:
ColorDetector() : it_(nh_)
{
ROS_INFO("🟡 启动红色物体检测节点...");// 订阅图像话题 image_sub_ = it_.subscribe("/camera/image_raw", 1, &ColorDetector::imageCallback, this); // 创建显示窗口 cv::namedWindow(ORIGINAL_WINDOW, cv::WINDOW_AUTOSIZE); cv::namedWindow(MASK_WINDOW, cv::WINDOW_AUTOSIZE); cv::namedWindow(RESULT_WINDOW, cv::WINDOW_AUTOSIZE); ROS_INFO("🟢 节点已启动"); ROS_INFO(" 正在监听话题: /camera/image_raw"); ROS_INFO(" 显示3个窗口:"); ROS_INFO(" 1. Original Image - 原始图像"); ROS_INFO(" 2. Red Mask - 红色区域掩码(白色=红色区域)"); ROS_INFO(" 3. Detection Result - 检测结果(绿色框标记)"); ROS_INFO(" 按'q'或ESC键退出"); } ~ColorDetector() { cv::destroyWindow(ORIGINAL_WINDOW); cv::destroyWindow(MASK_WINDOW); cv::destroyWindow(RESULT_WINDOW); ROS_INFO("节点关闭"); }};
int main(int argc, char** argv)
{
ros::init(argc, argv, "color_detector");
ColorDetector detector;
ros::spin();
return 0;
}
修改CMakelist.txt
# 在现有内容后添加
# 添加新的可执行文件
add_executable(color_detector src/color_detector.cpp)
# 链接同样的库
target_link_libraries(color_detector
${catkin_LIBRARIES}
${OpenCV_LIBRARIES}
)核心概念总结
| 概念 | 作用 | 类比 |
|---|---|---|
| HSV颜色空间 | 分离颜色和亮度,对光照变化更鲁棒 | 像把"红色"从"亮红色"和"暗红色"中抽象出来 |
| 掩码(Mask) | 二值图像,标记感兴趣区域 | 像用红色荧光笔在照片上标出所有红色物体 |
| 形态学操作 | 去除噪声,连接断裂区域 | 像用橡皮擦掉小污点,用笔连接断线 |
| 轮廓检测 | 找到白色区域的边界 | 像沿着荧光笔标记的边缘画线 |
| 外接矩形 | 用矩形框住检测到的物体 | 像给标记的区域画个绿色方框 |
第三步、让机器人自动跟踪检测到的红色物体
1,创建视觉跟踪节点
目标:
如果红色物体在图像左侧 → 机器人左转
如果红色物体在图像右侧 → 机器人右转
如果红色物体在图像中心 → 机器人直行cd ~/turtle_ws/src/robot_vision_cpp/src
touch red_tracker.cpp
// 红色物体跟踪节点
#include <ros/ros.h>
#include <image_transport/image_transport.h>
#include <cv_bridge/cv_bridge.h>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <geometry_msgs/Twist.h> // 新增:速度控制消息
class RedTracker
{
private:
ros::NodeHandle nh_;
image_transport::ImageTransport it_;
image_transport::Subscriber image_sub_;
// 新增:速度发布者
ros::Publisher cmd_vel_pub_;
// 窗口名称
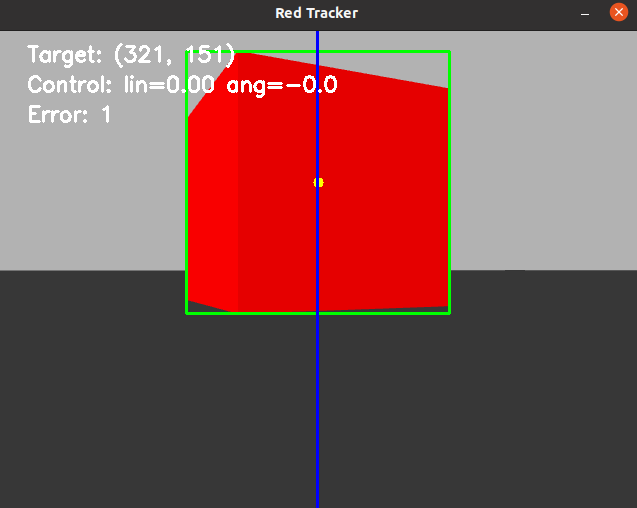
const std::string WINDOW_NAME = "Red Tracker";
// 颜色范围(和之前一样)
cv::Scalar lower_red1 = cv::Scalar(0, 100, 100);
cv::Scalar upper_red1 = cv::Scalar(10, 255, 255);
cv::Scalar lower_red2 = cv::Scalar(160, 100, 100);
cv::Scalar upper_red2 = cv::Scalar(180, 255, 255);
// 控制参数
double max_linear_speed = 0.2; // 最大线速度 m/s
double max_angular_speed = 1.0; // 最大角速度 rad/s
int image_center_x = 320; // 图像中心X坐标(640x480)
void imageCallback(const sensor_msgs::ImageConstPtr& msg)
{
try
{
// 1. 转换图像
cv_bridge::CvImagePtr cv_ptr = cv_bridge::toCvCopy(msg, "bgr8");
cv::Mat original = cv_ptr->image;
cv::Mat hsv_image;
cv::cvtColor(original, hsv_image, cv::COLOR_BGR2HSV);
// 2. 创建红色掩码
cv::Mat mask1, mask2, red_mask;
cv::inRange(hsv_image, lower_red1, upper_red1, mask1);
cv::inRange(hsv_image, lower_red2, upper_red2, mask2);
cv::bitwise_or(mask1, mask2, red_mask);
// 3. 形态学处理
cv::Mat kernel = cv::getStructuringElement(cv::MORPH_ELLIPSE, cv::Size(5, 5));
cv::morphologyEx(red_mask, red_mask, cv::MORPH_OPEN, kernel);
cv::morphologyEx(red_mask, red_mask, cv::MORPH_CLOSE, kernel);
// 4. 寻找轮廓
std::vector<std::vector<cv::Point>> contours;
cv::findContours(red_mask, contours, cv::RETR_EXTERNAL, cv::CHAIN_APPROX_SIMPLE);
// 5. 初始化控制指令
geometry_msgs::Twist cmd_vel;
cmd_vel.linear.x = 0.0;
cmd_vel.angular.z = 0.0;
// 6. 如果没有检测到红色物体,停止
if (contours.empty()) {
ROS_WARN_THROTTLE(1, "没有检测到红色物体,机器人停止");
cmd_vel_pub_.publish(cmd_vel);
// 显示提示
cv::putText(original, "No red object - STOP", cv::Point(30, 50),
cv::FONT_HERSHEY_SIMPLEX, 0.8, cv::Scalar(0, 0, 255), 2);
cv::imshow(WINDOW_NAME, original);
cv::waitKey(10);
return;
}
// 7. 找到最大的红色区域
double max_area = 0;
cv::Rect target_rect;
for (size_t i = 0; i < contours.size(); i++) {
double area = cv::contourArea(contours[i]);
if (area > max_area && area > 500) {
max_area = area;
target_rect = cv::boundingRect(contours[i]);
}
}
// 8. 如果找到有效目标,计算控制指令
if (max_area > 0) {
// 计算目标的中心点
int target_center_x = target_rect.x + target_rect.width / 2;
int target_center_y = target_rect.y + target_rect.height / 2;
// 绘制目标框和中心点
cv::rectangle(original, target_rect, cv::Scalar(0, 255, 0), 2);
cv::circle(original, cv::Point(target_center_x, target_center_y),
5, cv::Scalar(0, 255, 255), -1); // 黄色中心点
// 绘制图像中心线
cv::line(original, cv::Point(image_center_x, 0),
cv::Point(image_center_x, 480), cv::Scalar(255, 0, 0), 2);
// 9. 【核心控制逻辑】计算误差并生成控制指令
// 误差 = 目标中心X - 图像中心X
double error_x = target_center_x - image_center_x;
// 比例控制:角速度与误差成正比
cmd_vel.angular.z = -error_x / 500.0; // 比例系数1/500
// 线速度:目标越大(越近),速度越慢
double normalized_area = max_area / (640.0 * 480.0); // 面积占比
cmd_vel.linear.x = max_linear_speed * (1.0 - normalized_area * 5.0);
cmd_vel.linear.x = std::max(0.0, cmd_vel.linear.x); // 不小于0
// 限制角速度范围
if (cmd_vel.angular.z > max_angular_speed)
cmd_vel.angular.z = max_angular_speed;
if (cmd_vel.angular.z < -max_angular_speed)
cmd_vel.angular.z = -max_angular_speed;
// 10. 显示信息
std::string info = "Target: (" + std::to_string(target_center_x) +
", " + std::to_string(target_center_y) + ")";
cv::putText(original, info, cv::Point(30, 30),
cv::FONT_HERSHEY_SIMPLEX, 0.7, cv::Scalar(255, 255, 255), 2);
std::string control = "Control: lin=" + std::to_string(cmd_vel.linear.x).substr(0,4) +
" ang=" + std::to_string(cmd_vel.angular.z).substr(0,4);
cv::putText(original, control, cv::Point(30, 60),
cv::FONT_HERSHEY_SIMPLEX, 0.7, cv::Scalar(255, 255, 255), 2);
std::string error_str = "Error: " + std::to_string((int)error_x);
cv::putText(original, error_str, cv::Point(30, 90),
cv::FONT_HERSHEY_SIMPLEX, 0.7, cv::Scalar(255, 255, 255), 2);
ROS_INFO("目标位置: (%d, %d), 误差: %.1f, 控制: lin=%.2f, ang=%.2f",
target_center_x, target_center_y, error_x,
cmd_vel.linear.x, cmd_vel.angular.z);
}
// 11. 发布控制指令
cmd_vel_pub_.publish(cmd_vel);
// 12. 显示图像
cv::imshow(WINDOW_NAME, original);
// 检查退出键
char key = (char)cv::waitKey(10);
if (key == 'q' || key == 27) {
// 停止机器人后退出
cmd_vel.linear.x = 0;
cmd_vel.angular.z = 0;
cmd_vel_pub_.publish(cmd_vel);
ROS_INFO("停止机器人并退出");
ros::shutdown();
}
}
catch (cv_bridge::Exception& e)
{
ROS_ERROR("cv_bridge异常: %s", e.what());
}
}
public:
RedTracker() : it_(nh_)
{
ROS_INFO("🟡 启动红色物体跟踪节点...");
// 订阅图像
image_sub_ = it_.subscribe("/camera/image_raw", 1,
&RedTracker::imageCallback, this);
// 初始化速度发布者(重要:控制TurtleBot的话题)
cmd_vel_pub_ = nh_.advertise<geometry_msgs::Twist>("/cmd_vel", 10);
// 创建显示窗口
cv::namedWindow(WINDOW_NAME, cv::WINDOW_AUTOSIZE);
ROS_INFO("🟢 跟踪节点已启动");
ROS_INFO(" 订阅图像: /camera/image_raw");
ROS_INFO(" 发布控制: /cmd_vel");
ROS_INFO(" 按'q'或ESC键退出");
ROS_INFO("");
ROS_INFO("控制逻辑说明:");
ROS_INFO(" 1. 蓝色竖线: 图像中心线");
ROS_INFO(" 2. 绿色框: 检测到的红色物体");
ROS_INFO(" 3. 黄点: 物体中心点");
ROS_INFO(" 4. 误差 = 黄点X坐标 - 蓝线X坐标");
ROS_INFO(" 5. 误差>0: 物体在右侧 → 机器人右转(负角速度)");
ROS_INFO(" 6. 误差<0: 物体在左侧 → 机器人左转(正角速度)");
}
~RedTracker()
{
cv::destroyWindow(WINDOW_NAME);
// 节点关闭前停止机器人
geometry_msgs::Twist stop_cmd;
stop_cmd.linear.x = 0;
stop_cmd.angular.z = 0;
cmd_vel_pub_.publish(stop_cmd);
ROS_INFO("跟踪节点关闭,机器人已停止");
}
};
int main(int argc, char** argv)
{
ros::init(argc, argv, "red_tracker");
RedTracker tracker;
ros::spin();
return 0;
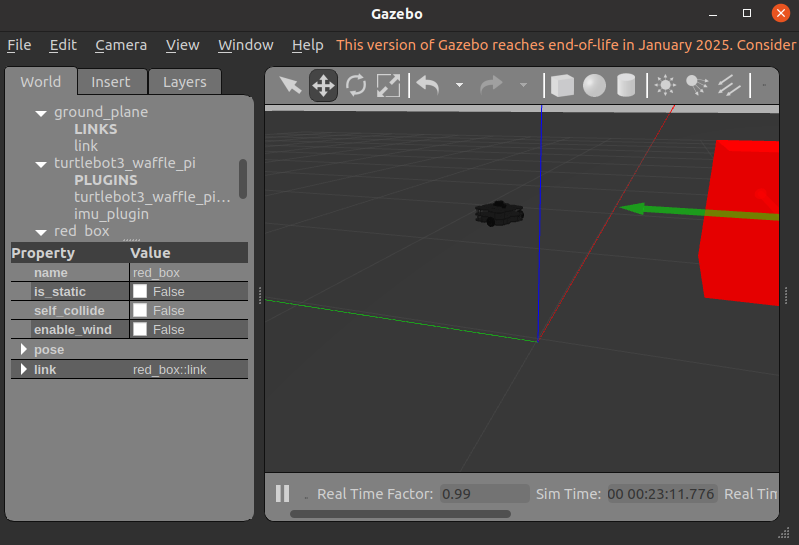
}第四步、在Gazebo中仿真,将视觉跟踪系统部署到TurtleBot3中
1。在世界文件中添加红色球体
cd ~/turtle_ws/src/robot_vision_cpp
mkdir launch
touch launch/red_tracking_sim.launch
<launch>
<!-- 红色物体跟踪仿真系统 -->
<!-- 设置TurtleBot3型号 -->
<arg name="model" default="waffle_pi" />
<!-- 启动Gazebo空世界 -->
<include file="$(find turtlebot3_gazebo)/launch/turtlebot3_empty_world.launch">
<arg name="model" value="$(arg model)" />
<!-- 注意:参数名可能是world_file而不是world_name -->
<!-- 我们先注释掉,用默认空世界 -->
<!-- <arg name="world_file" value="$(find turtlebot3_gazebo)/worlds/empty.world" /> -->
</include>
<!-- 在Gazebo中生成红色球体(作为跟踪目标) -->
<node name="spawn_red_ball" pkg="gazebo_ros" type="spawn_model"
args="-file $(find turtlebot3_gazebo)/models/red_ball/model.sdf
-sdf
-model red_ball
-x 2.0
-y 0.0
-z 0.5"
output="screen" />
<!-- 启动你的红色跟踪节点 -->
<node name="red_tracker" pkg="robot_vision_cpp" type="red_tracker"
output="screen">
<!-- 重映射话题:仿真摄像头的话题名不同 -->
<remap from="/camera/image_raw" to="/camera/rgb/image_raw" />
</node>
<!-- 可选:启动RViz观察 -->
<!-- <node name="rviz" pkg="rviz" type="rviz"
args="-d $(find turtlebot3_gazebo)/rviz/turtlebot3_gazebo_model.rviz" /> -->
</launch>启动Gazebo,并若无红色球体,则手动添加红色方块
# 终端1
export TURTLEBOT3_MODEL=waffle_pi
roslaunch turtlebot3_gazebo turtlebot3_empty_world.launch
# 1. 先删除现有模型(如果存在)
rosservice call /gazebo/delete_model '{model_name: red_ball}'
# 2. 重新生成一个更明显的红色立方体(不是球体)
echo '<?xml version="1.0"?>
<sdf version="1.6">
<model name="red_box">
<pose>1.5 0.0 0.5 0 0 0</pose>
<link name="link">
<visual name="visual">
<geometry><box><size>0.6 0.6 0.6</size></box></geometry>
<material>
<ambient>1 0 0 1</ambient>
<diffuse>1 0 0 1</diffuse>
<emissive>0.5 0 0 1</emissive> <!-- 自发光,更明显 -->
</material>
</visual>
<collision name="collision">
<geometry><box><size>0.6 0.6 0.6</size></box></geometry>
</collision>
</link>
</model>
</sdf>' | rosrun gazebo_ros spawn_model -sdf -stdin -model red_box运行跟踪节点
# 终端3
# 先测试摄像头是否工作
rosrun image_view image_view image:=/camera/rgb/image_raw
# 终端4
cd ~/turtle_ws
source devel/setup.bash
export TURTLEBOT3_MODEL=waffle_pi
# 运行跟踪节点
rosrun robot_vision_cpp red_tracker /camera/image_raw:=/camera/rgb/image_raw手动移动方块,机器人会跟随移动,小项目已完成。