前言
本系列学习笔记是本人跟随米醋电子工作室学习嵌入式的学习笔记,自用为主,不是教学或经验分享,若有误,大佬轻喷,同时欢迎交流学习,侵权即删。
一、I²C协议
1.1. I²C协议简介
I²C(Inter-Integrated Circuit,读作"I-squared-C")是一种由飞利浦公司(现恩智浦半导体)开发的串行通信总线,广泛应用于连接微控制器和低速外围设备。
核心特点
-
仅需两根信号线:串行数据线(SDA)和串行时钟线(SCL)
-
支持多主机多从机架构(最多128个设备,使用7位寻址)
-
每个设备都有唯一的地址
-
通信速率灵活(标准模式100kHz,快速模式400kHz等)
-
内置硬件应答机制确保可靠传输
-
支持总线仲裁,解决多主机冲突
应用场景
-
传感器连接与控制(温度、湿度、压力、加速度等)
-
存储设备通信(EEPROM、Flash等)
-
显示屏和LED驱动器控制
-
电源管理系统
-
实时时钟(RTC)
-
音频系统(例如数字音量控制)
-
摄像头模块通信
1.2. I²C协议基础概念
I²C协议基于一套精确的信号时序和状态转换。了解这些基础概念是掌握I²C通信的关键。点击每个概念卡片获取更多详细信息。
总线结构
I²C总线由两条开漏信号线组成:串行数据线(SDA)和串行时钟线(SCL)。总线上的所有设备并联连接,并通过上拉电阻默认保持高电平。开漏结构允许多个设备共享同一条总线而不会产生电平冲突。
主从架构
I²C网络中的设备分为主设备和从设备。主设备负责产生时钟信号、启动通信、寻址从设备和控制数据流向。从设备则响应主设备的命令,根据要求发送或接收数据。一个I²C总线可以有多个主设备和多个从设备。
设备寻址
I²C协议使用7位或10位地址空间来唯一标识每个从设备。常见的7位地址方式支持最多128个设备。主设备通过在总线上发送目标设备的地址和一个读/写位来选择通信对象。地址可由厂商预设或通过硬件配置。
起始和停止条件
I²C通信使用特殊的总线状态表示通信的开始和结束。起始条件(START)是在SCL高电平时,SDA从高变为低;停止条件(STOP)是在SCL高电平时,SDA从低变为高。这两种条件定义了一个完整通信帧的边界。
数据传输
数据在SCL时钟的控制下按位传输,遵循"最高有效位(MSB)优先"原则。数据在SCL低电平期间准备,在SCL高电平期间采样。一个完整的字节传输包含8位数据和1位应答。SDA电平在SCL高电平期间必须保持稳定。
应答机制
I²C协议的可靠性源于其内置的应答机制。每传输8位数据后,接收方需发送一个应答位(ACK)。应答位为低电平(0)表示成功接收,高电平(1)表示非应答(NACK)。这种机制使发送方能够确认数据已被正确接收。
1.3. I²C高级机制(了解即可)
除了基本的通信流程,I²C协议还提供了多种高级机制,以支持更复杂的通信需求和解决多种实际问题。
总线仲裁
在多主机I²C系统中,可能出现两个或更多主设备同时尝试控制总线的情况。I²C协议通过"线与"特性实现非破坏性仲裁:如果多个主设备同时发送数据,尝试输出"1"但检测到总线为"0"的主设备会识别出冲突,自动释放总线控制权。这种机制确保只有一个主设备能完成通信,而失败的主设备可以稍后重试。
时钟同步
当主设备将SCL拉高时,实际上只是释放了SCL线,由上拉电阻使其变为高电平。I²C允许从设备通过将SCL拉低来延长时钟低电平周期,这种机制称为"时钟拉伸"。从设备可以利用这一特性延缓通信,直到准备好处理下一个数据位。这对处理速度较慢的从设备尤为重要,让它们能够与高速主设备匹配工作。
多字节寻址
为突破7位寻址的128个设备限制,I²C支持10位寻址模式。10位寻址使用特殊的前缀格式:第一个字节以"11110"开头,后跟10位地址的高2位和读/写位;第二个字节包含10位地址的低8位。这种拓展寻址可支持高达1024个设备,同时与7位寻址设备保持兼容性,两种寻址方式的设备可共存于同一总线。
通用调用地址
I²C协议预留了特殊地址0x00作为"通用调用地址"。当主设备向此地址发送数据时,总线上所有从设备都应接收并处理该数据,实现广播功能。通用调用常用于全局复位、同步多个设备行为或同时更新多个设备的配置。通用调用后的第一个数据字节通常包含一个命令码,定义所有从设备应执行的具体操作。
高速模式和快速模式+
标准I²C通信速率为100kHz,但现代应用对更高速率有需求。I²C协议定义了多种高速模式:快速模式(400kHz)、快速模式+(1MHz)和高速模式(3.4MHz)。高速模式使用特殊的电平转换器和信号质量控制技术,以确保高频下的信号完整性。使用这些高速模式时,需要特别注意信号电平、上拉电阻值和信号线长度,以避免反射和串扰问题。
安全扩展
为满足安全需求,I²C协议添加了加密和认证扩展。I²C加密通常基于现有安全模块和加密芯片,在数据传输层上增加加密功能。这些安全特性对物联网设备、工业控制和安全关键应用尤为重要,能够防止未授权访问和数据篡改。安全扩展包括设备认证、加密数据传输和安全启动等功能。
1.4. I²C与其他通信协议对比(了解即可)
在嵌入式系统中,常见的几种串行通信协议各有优缺点。了解它们的区别有助于为不同应用场景选择合适的通信方式。
| 特性 | I²C | SPI | UART |
|---|---|---|---|
| 信号线数量 | 2 (SDA, SCL) | 3+n (MOSI, MISO, SCK, n×SS) | 2 (TX, RX) |
| 总线拓扑 | 多主多从(共享总线) | 单主多从(每从设备一根SS线) | 点对点(通常为两设备间通信) |
| 最大设备数 | 理论上128个(7位地址) 1024个(10位地址) | 取决于微控制器GPIO数量 | 2(点对点) |
| 通信速率 | 100kHz(标准) 400kHz(快速) 1MHz(快速+) 3.4MHz(高速) | 可达数十MHz | 通常115.2kbps以下 高速可达几Mbps |
| 通信方式 | 半双工(双向但不能同时) | 全双工(可同时收发) | 全双工(可同时收发) |
| 时钟同步 | 同步(由SCL控制) | 同步(由SCK控制) | 异步(需双方约定波特率) |
| 应答机制 | 有(每字节后ACK/NACK) | 无(需自行实现) | 无(需自行实现) |
| 总线仲裁 | 支持(多主设备冲突检测) | 不支持 | 不支持 |
| 主要优势 | 配线简单,支持多设备,内置寻址和应答 | 高速,简单易实现,全双工通信 | 仅需两线,无需时钟线,可远距离通信 |
| 主要劣势 | 速度相对较慢,实现较复杂 | 需要较多引脚,无标准协议规范 | 无同步机制,速率有限,需额外错误检测 |
1.5. I²C实际常见应用场景
I²C协议在各种嵌入式系统中有广泛应用。以下是几个常见的应用场景示例,展示了I²C协议如何在实际项目中发挥作用。
温度传感器读取
微控制器通过I²C总线读取温度传感器(如TMP102或LM75)的温度数据。通信流程包括:主设备发送起始条件,发送传感器地址和读操作位,传感器返回温度数据(通常为16位值),最后主设备发送停止条件结束通信。
这种应用充分利用了I²C的简单接口和标准通信流程,使得添加多个类似传感器变得简单高效,只需确保每个传感器具有唯一地址即可。
OLED显示屏控制
通过I²C总线控制OLED显示模块(如SSD1306驱动芯片)。主控制器首先发送控制命令设置显示参数(如对比度、翻转等),然后发送图形数据更新显示内容。每次数据传输都伴随应答确认,确保显示正确更新。
OLED显示模块应用展示了I²C协议在大量数据传输场景中的能力,通过简单的两线接口传输大量图形数据,降低了接口复杂度。
EEPROM数据存储
使用I²C接口的EEPROM芯片存储配置数据或用户信息。写入操作时,主设备发送起始条件,EEPROM地址,存储单元地址,然后发送要写入的数据;读取操作需要先写入要读取的地址,然后发送重复起始条件,切换到读模式获取数据。
EEPROM应用充分利用了I²C的重复起始特性,允许在不释放总线的情况下从写模式切换到读模式,简化了寄存器访问操作。
多传感器系统集成
在一个智能监控系统中,单个I²C总线可连接多个传感器:气压传感器、湿度传感器、光线传感器等。主控制器轮询各传感器获取环境数据,每个传感器具有唯一地址以区分。这种方式大大简化了系统布线复杂度。
多传感器集成是I²C协议最显著的优势应用,通过共享的两线总线连接多种不同类型的传感器,实现系统扩展的同时保持连接简洁。
二、认识核心:SSD1306 控制芯片
SSD1306 是一款广泛用于单色 OLED 显示屏的控制器驱动芯片。了解它的基本特性有助于我们更好地进行驱动开发。
2.1 主要特性
- 显示类型: 单色(通常为白色、蓝色或黄蓝双色)被动矩阵 OLED (PMOLED)。
- 分辨率: 最大支持 128x64 像素。常见的模块有 128x64 (0.96英寸) 和 128x32 (0.91英寸)。
- 接口: 支持多种通信接口,包括 I2C、SPI (3线或4线) 和并行接口。本教程聚焦于 I2C 接口。
- 内部 RAM (GDDRAM): 芯片内置图形显示数据 RAM (Graphic Display Data RAM),大小通常为 128x64位 (1KB)。MCU 通过接口将要显示的像素数据写入 GDDRAM,SSD1306 负责根据 GDDRAM 的内容点亮屏幕上的像素点。
- 工作电压: 逻辑电压通常为 3.3V 或 5V,但屏幕驱动电压可能需要内部电荷泵升压。
- 控制方式: 通过发送一系列命令来配置显示参数(如对比度、显示开关、地址模式等),并通过发送数据来更新 GDDRAM 内容。
2.2 I2C 通信协议
当使用 I2C 接口时,SSD1306 模块通常表现为一个 I2C 从设备,拥有一个固定的设备地址(通常是 0x78 或 0x7A,可能通过模块上的跳线选择)。
与 SSD1306 的 I2C 通信包含两种主要类型的传输:
- 写命令 (Write Command): MCU 向 SSD1306 发送控制字节,用于设置显示模式、对比度等。
- 写数据 (Write Data): MCU 向 SSD1306 发送数据字节,这些字节会被写入 GDDRAM,用于更新屏幕显示内容。
SSD1306 通过一个特定的控制字节来区分接收到的数据是命令还是数据。通常,控制字节的格式为:
- 命令:
0x00(Co=0, D/C#=0) + Command Byte - 数据:
0x40(Co=0, D/C#=1) + Data Byte
因此,MCU 在发送命令或数据前,需要先发送对应的控制字节。
2.3 显示原理
SSD1306 驱动的是被动矩阵 OLED (PMOLED)。屏幕由水平的行线 (Common Electrodes, SEG) 和垂直的列线 (Segment Electrodes, COM) 交叉构成。每个交叉点就是一个像素 (一个 OLED 发光点)。
- GDDRAM 映射: 芯片内部的 GDDRAM (图形显示数据 RAM) 存储了每个像素的开关状态。对于 128x64 的屏幕,GDDRAM 通常是 1KB (128 * 64 / 8 = 1024 bytes)。GDDRAM 中的每一位 (bit) 对应屏幕上的一个像素:'1' 表示点亮,'0' 表示熄灭。
- 扫描与驱动: SSD1306 通过快速、分时地扫描 COM 线,并根据 GDDRAM 中的数据控制 SEG 线上的电平,来逐行(或逐页)点亮对应的像素。由于人眼的视觉暂留效应,我们感觉整个屏幕是同时亮的。
- 页面结构: GDDRAM 通常按"页 (Page)"组织。对于 128x64 屏幕,通常分为 8 页 (Page 0 ~ Page 7),每页包含 128 列 x 8 行像素 (128 bytes)。写入数据时,通常需要先设置目标页地址和列地址。
理解 GDDRAM 与像素的映射关系以及页面结构,对于直接操作显存或编写底层驱动至关重要。
2.4 控制流程
与 SSD1306 交互通常遵循以下基本流程:
-
初始化序列 (Initialization Sequence): 上电后,需要向 SSD1306 发送一系列特定的命令来配置其工作状态。这通常包括:
- 解锁命令(如果需要)。
- 关闭显示 (
0xAE)。 - 设置显示时钟分频系数和振荡器频率。
- 设置 MUX 复用比 (决定扫描行数,如 64 行对应
0xA8, 0x3F)。 - 设置显示偏移 (
0xD3, 0x00)。 - 设置起始行 (
0x40 | 0x00)。 - 配置电荷泵 (Charge Pump) 以产生 OLED 所需的高电压 (
0x8D, 0x14)。 - 配置内存地址模式 (水平、垂直或页面地址模式,
0x20, 0x00/0x01/0x02)。 - 设置 SEG/COM 引脚硬件配置 (
0xDA, 0x12)。 - 设置对比度 (
0x81, 0xCF)。 - 设置预充电周期 (
0xD9, 0xF1)。 - 设置 VCOMH 电压 (
0xDB, 0x40)。 - 设置整个屏幕显示来自 GDDRAM (
0xA4) 或强制点亮 (0xA5)。 - 设置正常/反相显示 (
0xA6/0xA7)。 - 开启显示 (
0xAF)。
💡这个初始化序列非常关键,通常由驱动库的 `OLED_Init()` 函数完成。命令和参数的具体值可能因模块或驱动库而异。
-
设置地址指针: 在写入像素数据之前,需要发送命令设置 GDDRAM 的目标页地址和列地址 (例如,使用页面地址模式时,发送
0xB0 | page_num,0x00 | (col & 0x0F),0x10 | (col >> 4))。 -
写入数据: 发送写数据指令 (控制字节
0x40) 和随后的像素数据字节。数据会根据设置的地址模式自动写入 GDDRAM,并且地址指针通常会自动递增。 -
重复 2 和 3: 根据需要更新屏幕的不同区域。
例如,清屏操作本质上就是将 GDDRAM 的所有字节都设置为 0x00。
2.5 开发思路
在项目中集成 OLED 显示时,有几种常见的开发策略:
- 直接命令操作: 直接根据 SSD1306 数据手册发送 I2C/SPI 命令和数据。这种方式最灵活,但也最复杂,需要深入理解芯片细节。适用于资源极其受限或需要高度定制的场景。
- 封装底层驱动库: 编写或移植一个基础驱动库(如此教程第 4 节示例)。该库封装初始化序列、基本的写命令/数据函数,以及一些基础绘图函数(如清屏、设置点、显示字符/字符串)。这是比较常见的做法,在复杂度和易用性之间取得平衡。
- 使用图形库 (如 u8g2): 对于需要绘制复杂图形、使用多种字体或构建用户界面的应用,强烈推荐使用成熟的图形库(如此教程第 5 节的 u8g2)。这些库提供了丰富的 API,屏蔽了底层的硬件细节,开发者可以专注于应用逻辑。缺点是会占用更多的 Flash 和 RAM 资源。
显存管理策略:
- 全缓冲 (Full Buffer): 在 MCU 的 RAM 中创建一个与 OLED 显存同样大小的缓冲区。所有绘图操作先更新 RAM 缓冲区,最后一次性将整个缓冲区发送到 OLED。优点是绘图灵活,避免闪烁;缺点是占用较多 RAM (例如 128x64 屏需要 1KB RAM)。u8g2 的 `_f` 后缀模式即为此。
- 页缓冲 (Page Buffer / Partial Buffer): 只在 MCU RAM 中创建一页或几页大小的缓冲区。绘图时按页进行,绘制完一页就发送一页。优点是 RAM 占用少;缺点是绘图逻辑相对复杂,跨页绘制需要特殊处理。u8g2 的 `_1` (单页) 或 `_2` (双页) 后缀模式属于此类。
- 无缓冲 (Direct Draw): 不在 MCU 中创建缓冲区,直接计算像素位置并发送命令/数据到 OLED。RAM 占用最少,但绘图效率最低,且容易产生闪烁,通常只适用于非常简单的静态显示。
选择哪种开发思路和显存管理策略,需要根据项目需求、MCU 资源限制以及开发效率要求来权衡。
三、HAL I2C API 解析
STM32 HAL 库为我们提供了方便的函数来操作 I2C 外设,从而与 SSD1306 进行通信。以下是驱动 OLED 时常用的一些 HAL I2C API。
3.1 I2C 相关 API
⚙️ I2C_HandleTypeDef (句柄)
这是 I2C 外设的"控制器"结构体。它包含了 I2C 的配置信息(如时钟速度、地址模式、使用的引脚等)、运行时状态和错误代码。所有 I2C 相关的 HAL 函数都需要传递一个指向该类型结构体的指针(例如 `&hi2c1`)。该结构体通常由 CubeMX 自动生成和初始化。
✅ HAL_StatusTypeDef HAL_I2C_Init(I2C_HandleTypeDef *hi2c)
- 用途: 根据 `I2C_HandleTypeDef` 结构体中的配置信息初始化 I2C 外设。
- 参数:
hi2c- 指向 I2C 句柄的指针。 - 返回:
HAL_OK(成功),HAL_ERROR,HAL_BUSY。 - 说明: 通常在系统启动时由 CubeMX 生成的 `MX_I2C1_Init()` (或类似) 函数内部调用。我们一般不需要手动调用它。
📡 HAL_StatusTypeDef HAL_I2C_Master_Transmit(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint8_t *pData, uint16_t Size, uint32_t Timeout)
- 用途: 以 Master 模式通过 I2C 发送数据到指定的从设备地址。
- 参数:
hi2c: 指向 I2C 句柄的指针。DevAddress: 目标从设备的 7 位地址。注意: HAL 库通常需要传入左移一位 的地址(即包含读写位的 8 位地址格式,但最低位会被函数内部处理)。例如,如果 OLED 地址是 0x3C (7位),则应传入0x3C << 1或0x78。具体请参考 HAL 库文档或示例。驱动库内部通常会处理好地址。pData: 指向要发送的数据缓冲区的指针。Size: 要发送的数据字节数。Timeout: 发送超时时间(毫秒)。
- 返回:
HAL_OK,HAL_ERROR,HAL_BUSY,HAL_TIMEOUT。 - 说明: 这是向 OLED 发送命令或数据的主要方式之一。`pData` 缓冲区通常需要包含 SSD1306 需要的控制字节 (
0x00或0x40) 以及后续的命令/数据字节。
📝 HAL_StatusTypeDef HAL_I2C_Mem_Write(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint16_t MemAddress, uint16_t MemAddSize, uint8_t *pData, uint16_t Size, uint32_t Timeout)
- 用途: 向 I2C 从设备的指定内存地址写入数据。这个函数在很多 I2C 设备驱动中常用,对于 SSD1306 来说,它可以巧妙地用来发送命令和数据。
- 参数:
hi2c: 指向 I2C 句柄的指针。DevAddress: 目标从设备的 7 位地址 (同样需要注意左移)。MemAddress: 目标内存地址。对于 SSD1306,这个参数可以被用来传递控制字节 (0x00用于命令,0x40用于数据)。MemAddSize: 内存地址的大小,对于传递控制字节,通常设置为I2C_MEMADD_SIZE_8BIT。pData: 指向要写入的数据缓冲区的指针 (实际的命令字节或像素数据)。Size: 要写入的数据字节数。Timeout: 超时时间(毫秒)。
- 返回:
HAL_OK,HAL_ERROR,HAL_BUSY,HAL_TIMEOUT。 - 说明: 许多 SSD1306 驱动库(包括我们将要移植的库)会使用 `HAL_I2C_Mem_Write` 来发送命令和数据。例如,发送一个命令字节 `CMD`,会调用 `HAL_I2C_Mem_Write(&hi2c1, OLED_ADDR, 0x00, I2C_MEMADD_SIZE_8BIT, &CMD, 1, TIMEOUT)`。发送一个数据字节 `DATA`,会调用 `HAL_I2C_Mem_Write(&hi2c1, OLED_ADDR, 0x40, I2C_MEMADD_SIZE_8BIT, &DATA, 1, TIMEOUT)`。这种方式简化了驱动代码。
❓ HAL_StatusTypeDef HAL_I2C_IsDeviceReady(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint32_t Trials, uint32_t Timeout)
- 用途: 检查指定的 I2C 从设备是否在线并响应其地址。
- 参数:
hi2c: 指向 I2C 句柄的指针。DevAddress: 要检查的从设备地址 (同样需要注意左移)。Trials: 尝试发送地址的次数。Timeout: 每次尝试的超时时间。
- 返回:
HAL_OK(设备响应),HAL_ERROR,HAL_BUSY,HAL_TIMEOUT(设备未响应)。 - 说明: 在初始化 OLED 之前,可以调用此函数来确认 OLED 模块是否正确连接并且 I2C 通信正常。有助于调试硬件连接问题。
💡理解这些基本的 I2C 通信函数,特别是 `HAL_I2C_Master_Transmit` 或 `HAL_I2C_Mem_Write` 如何被用来发送命令和数据,是成功驱动 OLED 的关键。
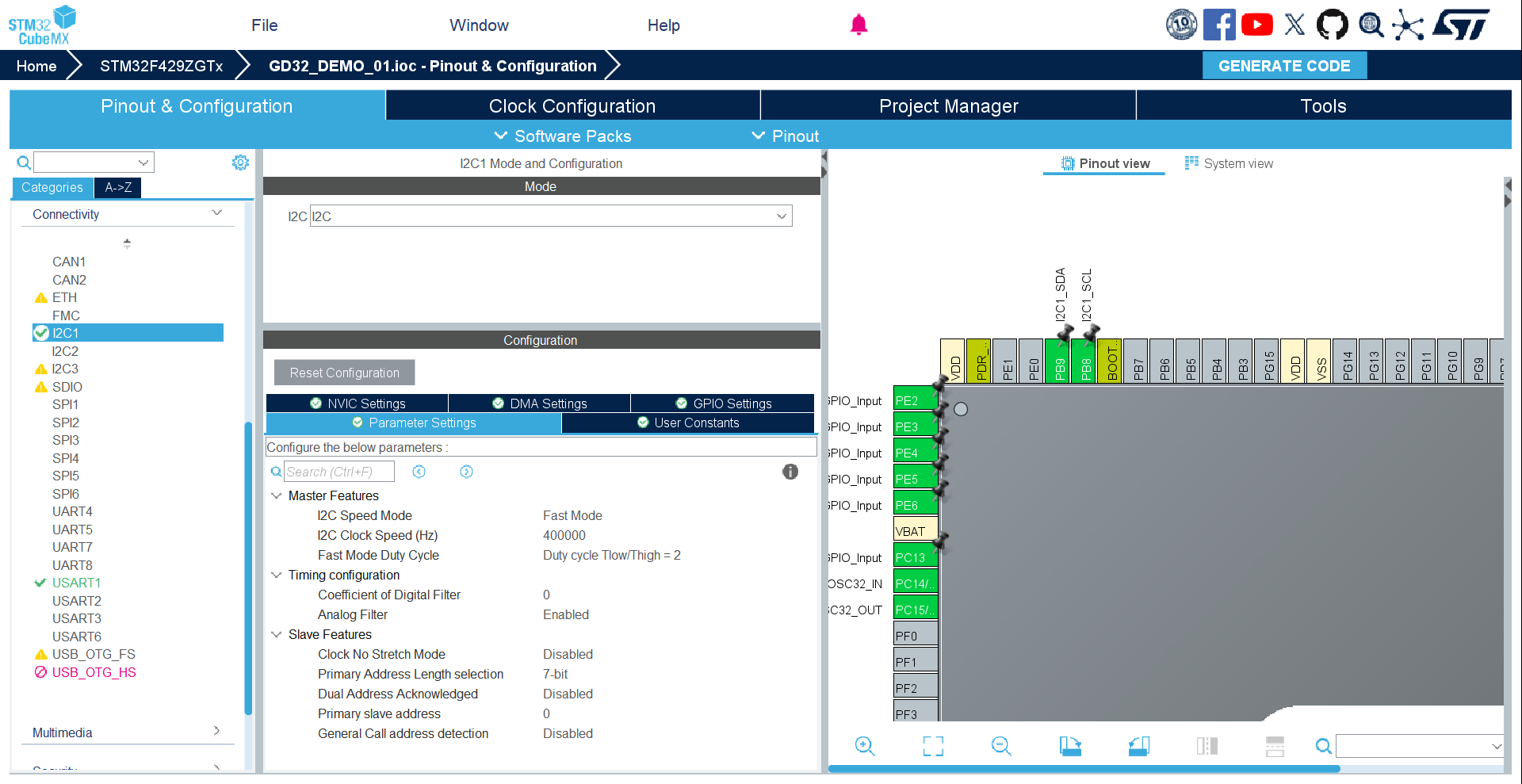
四、STM32 I2C 配置
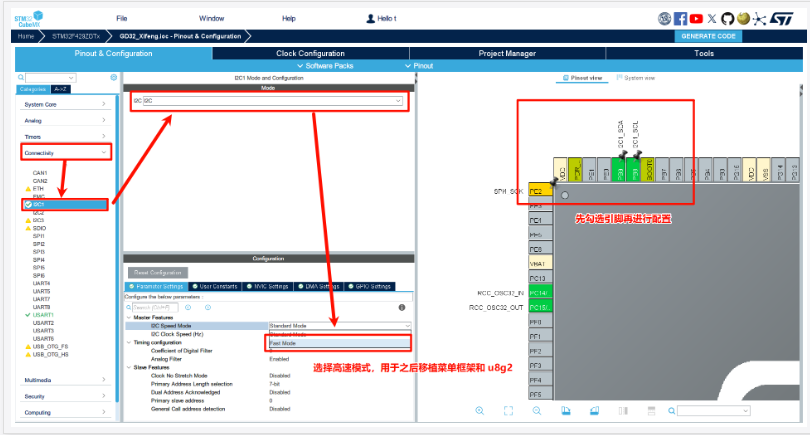
4.1. I2C: 模式选择
选择 I2C 的工作模式 (标准/快速) 并进行基础配置。
I2C 模式选择决定了 STM32 在 I2C 总线上扮演的角色以及基本的工作方式。
配置流程
在 CubeMX 的下拉菜单中选择 I2C 外设的工作模式。
I2CSMBus DeviceSMBus HostDisabled
- I2C: 最常用 标准的 I2C 模式,STM32 可以作为主机 (Master) 或从机 (Slave)。
- SMBus Device/Host: 系统管理总线模式,是 I2C 的一个变种,具有更严格的时序和协议要求,例如超时检测、PEC (Packet Error Checking) 等。通常用于电源管理或特定的传感器。
- Disabled: 禁用该 I2C 外设。
配置建议: 除非明确需要 SMBus 协议,否则选择 I2C 模式。
I2C 速度模式 (I2C Speed Mode)
选择 I2C 总线的最大通信速率。
Standard Mode (标准模式)Fast Mode (快速模式)Fast Mode Plus (快速模式+)
- Standard Mode: 最高速率 100 kHz。兼容性最好。
- Fast Mode: 最高速率 400 kHz。是目前应用最广泛的速度。
- Fast Mode Plus: 最高速率 1 MHz。需要外设和 GPIO 都支持 FMP+ 特性(并非所有 STM32 型号都支持)。
说明: 实际通信速率由 "时钟配置" 中的具体设置决定,这里选择的是支持的最高模式。
配置建议: 根据从设备支持的最高速率以及系统需求选择。Fast Mode (400 kHz) 是最常用的选择。
核心选择: 通常情况下,选择 Mode: I2C 和 Speed Mode: Fast Mode 即可满足大部分应用场景。具体的 SCL 时钟频率在 "时钟配置" 中设置。
4.2 实战演练:移植 SSD1306 驱动
现在,我们将根据 `Oled 驱动移植.md` 文档中的步骤,将一个基于 HAL 库的 SSD1306 驱动移植到我们的项目中。假设你已经创建了一个 STM32CubeMX 工程。
参考的 Github 仓库:https://github.com/yangjinhaoaa/OLED0.91-SSD1306-HAL
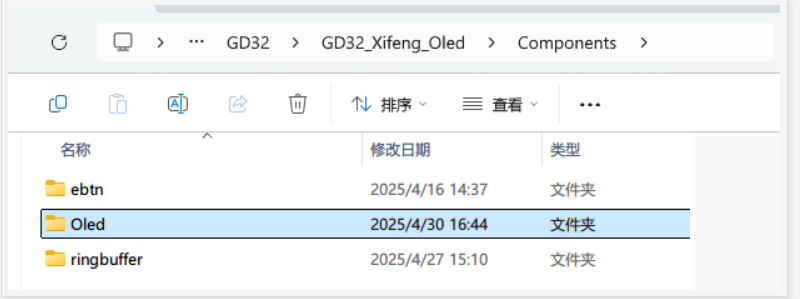
1. 获取并放置驱动文件
-
在你的项目文件夹(例如 Keil 项目根目录)下,创建一个用于存放第三方组件的文件夹,例如 `Components`。
-
在 `Components` 文件夹内,再创建一个 `Oled` 文件夹。
-
从上述 Github 仓库下载驱动文件(通常是一个 ZIP 压缩包)。
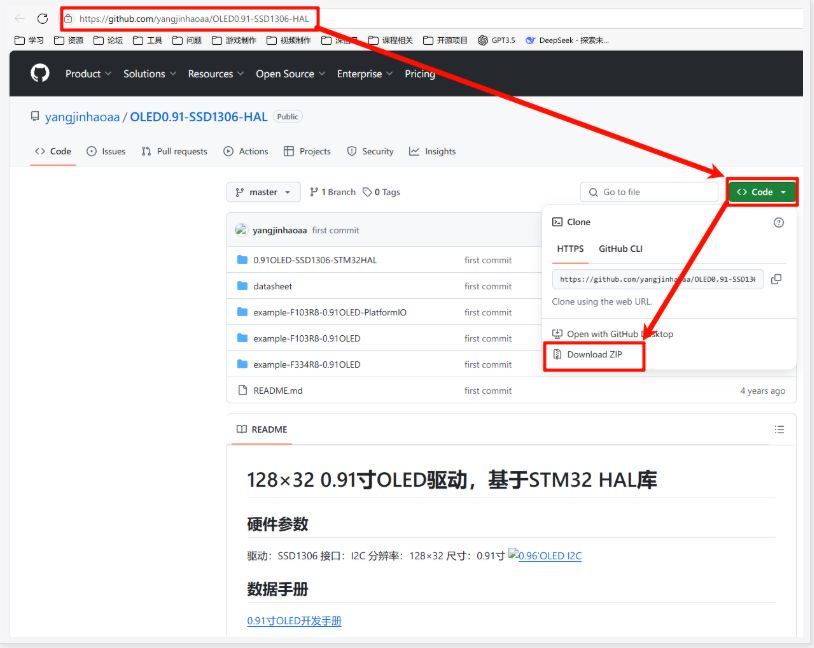
-
解压下载的文件。找到包含驱动源文件(如 `oled.c`, `oled.h`, `oledfont.h` 等)的文件夹(根据文档描述,可能是名为 `0.91OLED-SSD1306-STM32HAL` 的文件夹)。
-
将该文件夹中的所有 `.c` 和 `.h` 文件复制到你之前创建的 `Components/Oled` 文件夹中。

2. CubeMX 配置 I2C
-
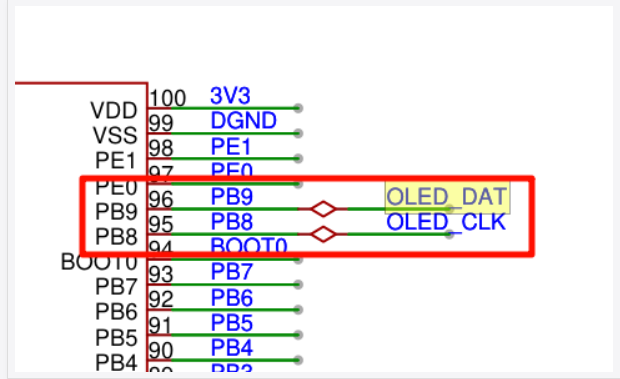
确定引脚: 查阅你的开发板原理图或 OLED 模块说明,确定连接到 STM32 的 I2C SCL (时钟) 和 SDA (数据) 引脚。文档示例使用的是 PB8 (SCL) 和 PB9 (SDA)。
-
配置 CubeMX:
-
打开你的 CubeMX 工程。
-
在 Pinout & Configuration 视图中,找到对应的 I2C 外设 (例如 I2C1)。
-
将模式 (Mode) 设置为 `I2C`。
-
在下方的配置区域 (Configuration),确认 I2C 的参数设置。标准模式 (Standard Mode) 速度 100kHz 或快速模式 (Fast Mode) 400kHz 通常都可以。其他参数可以暂时保持默认。
-
确保对应的 SCL 和 SDA 引脚已在右侧芯片图上正确分配给所选的 I2C 功能。
-
-
生成代码 (Generate Code)。
3. 移植与配置驱动代码 (以 Keil MDK 为例)
-
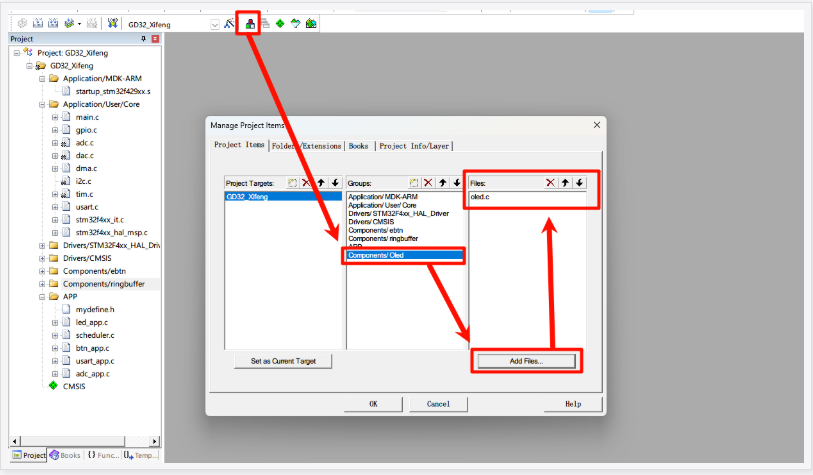
添加文件到工程:
-
在 Keil 的 Project 窗口中,右键点击你的目标分组(或新建一个分组,如 `Components`),选择 "Add Existing Files to Group..."。
-
导航到 `Components/Oled` 文件夹,选择 `oled.c` 文件并添加。
-
-
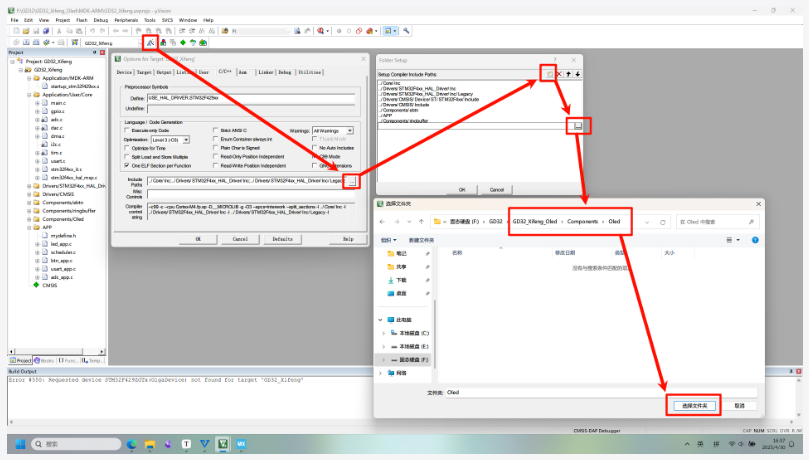
添加头文件路径:
-
点击魔术棒图标 (Options for Target)。
-
切换到 "C/C++" 选项卡。
-
在 "Include Paths" 旁边的文本框后面的 "..." 按钮点击。
-
添加 `Components/Oled` 文件夹的路径。
-
-
包含头文件: 在你项目的主要头文件(例如 `main.h` 或一个自定义的 `mydefine.h`)中,添加 `#include "oled.h"`。
-
修改 I2C 句柄: 打开 `oled.c` 文件。找到驱动代码中使用 I2C 发送函数的地方(通常是调用 `HAL_I2C_Mem_Write` 或类似函数)。将代码中使用的 I2C 句柄(文档示例中是 `&hi2c2`)修改为你项目中实际使用的 I2C 句柄(由 CubeMX 生成,例如 `&hi2c1`)。
cpp// 在 oled.c 中找到类似的代码行并修改 // 原代码可能为: HAL_I2C_Mem_Write(&hi2c2, ...); // 修改为 (假设你用的是 I2C1): HAL_I2C_Mem_Write(&hi2c1, OLED_ADDRESS, memAddr, I2C_MEMADD_SIZE_8BIT, pData, size, 100); // ... (根据驱动库的具体实现调整)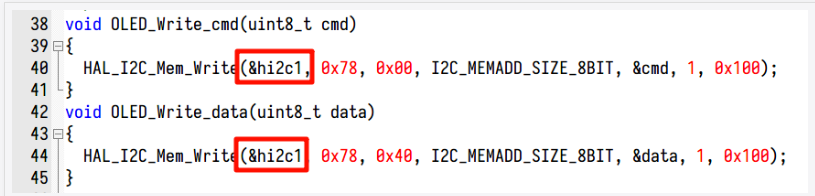
注意: 确保 `OLED_ADDRESS` 宏定义(通常在 `oled.h` 或 `oled.c` 中)与你的 OLED 模块实际地址匹配 (通常是 0x78 或 0x7A)。
4. 创建应用层接口与任务
-
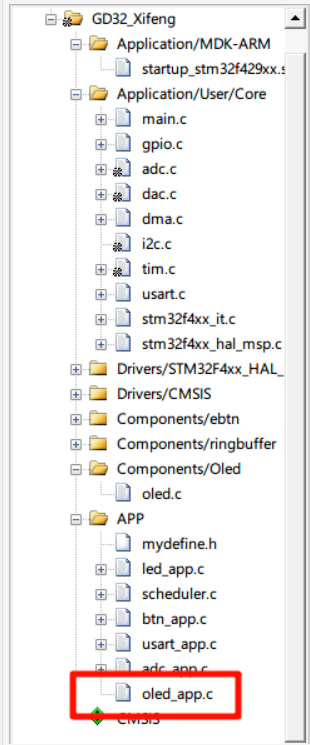
创建应用文件: 在你的应用代码文件夹(例如 `APP` 或 `Application`)中,创建 `oled_app.c` 和 `oled_app.h` 文件。将 `oled_app.c` 添加到 Keil 工程中。
-
编写应用代码: 将文档中提供的 `oled_app.h` 和 `oled_app.c` 的内容复制到对应文件中。`Oled_Printf` 函数提供了一个方便的、类似 `printf` 的接口来在 OLED 上显示格式化字符串。`oled_task` 是一个示例任务,用于显示简单文本。
cpp#include "oled_app.h" // 假设 OLED 宽度为 128 像素,使用 6x8 字体 // 每行 8 像素高,最多 64/8 = 8 行 (y=0~7) 或 32/8 = 4 行 (y=0~3) // 每列 6 像素宽,最多 128/6 = 21 个字符 (x=0~20? 驱动库可能基于像素位置) // **注意:** Oled_Printf 的 x, y 参数单位需要参考 OLED_ShowStr 实现,可能是字符位置或像素位置 // 文档中的注释 (0-127, 0-3) 暗示可能是 128x32 屏幕的像素 x 坐标和字符行 y 坐标 /** * @brief 使用类似printf的方式显示字符串,显示6x8大小的ASCII字符 * @param x 起始 X 坐标 (像素) 或 字符列位置 (需要看 OLED_ShowStr) * @param y 起始 Y 坐标 (像素) 或 字符行位置 (需要看 OLED_ShowStr, 0-3 或 0-7) * @param format, ... 格式化字符串及参数 * 例如:Oled_Printf(0, 0, "Data = %d", dat); **/ int Oled_Printf(uint8_t x, uint8_t y, const char *format, ...) { char buffer[128]; // 缓冲区大小根据需要调整 va_list arg; int len; va_start(arg, format); len = vsnprintf(buffer, sizeof(buffer), format, arg); va_end(arg); // 假设 OLED_ShowStr 使用像素坐标 x 和字符行 y // 并且字体大小是 8 (高度) OLED_ShowStr(x, y, (char*)buffer, 8); // 去掉 * 8 return len; } /* Oled 显示任务 */ void oled_task(void) { // 清屏通常是需要的,否则旧内容会保留 //OLED_Clear(); Oled_Printf(0, 0, "Hello World!!!"); Oled_Printf(0, 2, "Welcome to MCU!"); // 刷新显示到屏幕 (如果驱动库需要) // OLED_Refresh_Gram(); // 取决于驱动库是否有显存刷新机制 }注意: 上述 `Oled_Printf` 的实现假设 `OLED_ShowStr` 的 y 参数是像素坐标。如果 `OLED_ShowStr` 的 y 参数是字符行号,则调用应改为 `OLED_ShowStr(x, y, (uint8_t*)buffer, 8);`。请查阅你移植的 `oled.c` 中 `OLED_ShowStr` 函数的注释或实现来确认。同时,可能需要调用清屏函数 `OLED_Cls()` 和刷新函数(如果驱动库有缓冲区机制)。
-
包含应用头文件: 在你的主要头文件(例如 `main.h` 或 `mydefine.h`)中添加 `#include "oled_app.h"`。
5. 集成与测试
-
调用初始化: 在 `main.c` 文件的 `main` 函数中,在 I2C 初始化 (`MX_I2C1_Init()`) 之后 ,调用 OLED 初始化函数。
cpp// main.c int main(void) { // ... HAL_Init(), SystemClock_Config() ... MX_GPIO_Init(); MX_I2C1_Init(); // 确保 I2C 初始化在前 OLED_Init(); // 调用 OLED 初始化函数 // ... 其他初始化 ... while (1) { // ... 主循环 ... // 如果没有使用调度器,可以在这里直接调用 oled_task() // oled_task(); // HAL_Delay(100); // 添加延时避免过于频繁刷新 } } -
集成到任务调度器 (如果使用): 如果你使用了任务调度器(如文档中的 `scheduler.c`),将 `oled_task` 添加到任务列表中,并设置合适的执行周期(例如 100ms 或 500ms,取决于刷新需求)。
-
编译和下载: 编译整个工程,并将生成的目标文件下载到你的 STM32 开发板。
-
观察结果: 如果一切顺利,你的 OLED 屏幕应该会显示 "Hello World!!!" 和 "Welcome to MCU!"。

⚠️调试提示: 如果屏幕没有显示或显示异常:
-
检查硬件连接: 确认 SCL, SDA, VCC, GND 连接牢固且正确。
-
检查 I2C 地址: 确认驱动代码中的 `OLED_ADDRESS` 与模块地址匹配。
-
检查 I2C 句柄: 确认 `oled.c` 中使用的 I2C 句柄 (`&hi2c1`?) 与 CubeMX 生成的一致。
-
使用 `HAL_I2C_IsDeviceReady`: 在 `OLED_Init()` 之前调用此函数检查设备是否响应。
-
查看 `OLED_Init()`: 确保初始化函数被成功调用。
-
确认 `Oled_Printf` 实现: 检查 `OLED_ShowStr` 的参数含义,调整 `Oled_Printf` 中的调用。
-
清屏与刷新: 确保在显示前调用了清屏函数,并在需要时调用了刷新函数(如果驱动库有缓冲区机制)。
五、 进阶:移植 u8g2 图形库
虽然基础的 SSD1306 驱动可以满足基本的文本和点线显示需求,但如果你想在 OLED 上绘制更复杂的图形、使用丰富的字体或者更方便地布局界面,强大的 u8g2 图形库 是一个绝佳的选择。
u8g2 是一个适用于嵌入式系统的单色显示屏图形库,支持多种控制器(包括 SSD1306)和通信接口。它提供了丰富的绘图 API(点、线、矩形、圆形、文本等)和大量的字体支持。相比简单的字符驱动,u8g2 使得创建图形化界面和显示复杂信息变得更加容易。
接下来,我们将根据参考文档,演示如何将 u8g2 移植到我们的 STM32 项目中(基于硬件 I2C)。移植的核心在于提供平台相关的底层接口函数,让 u8g2 库能够控制 GPIO(如果需要)并与显示屏进行通信。
5.1 准备文件
-
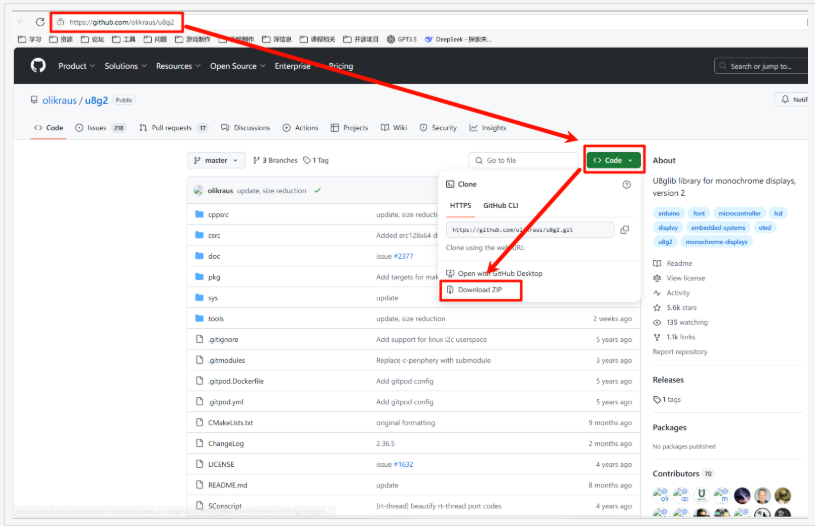
下载 u8g2 的 C 源码包 (通常在 Github Releases 页面)。
原因: u8g2 是一个开源库,我们需要将其源代码集成到我们的嵌入式项目固件中,而不是像在 PC 开发中那样链接动态库。因此,必须下载其 C 语言源文件。
-
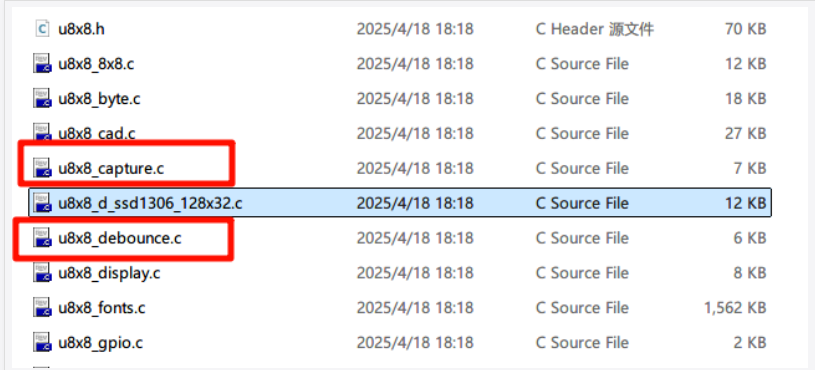
解压文件,找到 `csrc` 文件夹。这个文件夹包含了 u8g2 库的核心代码和支持的各种显示驱动。为了显著减小最终编译后的代码体积(嵌入式系统资源有限),我们需要进行裁剪。根据你的 OLED 型号删除 `csrc` 目录中不需要的显示驱动文件 (`u8x8_d_*.c`)。参考文档以 0.91 寸 OLED (通常是 SSD1306 控制器, 128x32 分辨率) 为例,建议只保留与 SSD1306 相关的驱动文件,例如 `u8x8_d_ssd1306_128x32_univision.c` (文件名可能因 u8g2 版本略有不同,查找包含 `ssd1306` 和对应分辨率的文件),删除其他所有 `u8x8_d_*.c` 文件。
原因: 嵌入式系统通常 Flash (存储代码) 和 RAM (运行内存) 资源非常宝贵。u8g2 为了支持广泛的硬件,包含了大量驱动代码。将所有驱动都编译进项目会极大地浪费 Flash 空间。通过只保留我们实际使用的屏幕型号 (SSD1306, 128x32) 对应的驱动文件,可以有效减小固件大小。
-
修改 `u8g2_d_setup.c` 文件。此文件包含了针对不同显示屏、接口和缓冲模式的初始化设置函数 (`u8g2_Setup_...`)。同样为了精简,只保留与你选择的驱动和接口匹配的 setup 函数。参考文档示例针对 SSD1306、I2C 接口、128x32 分辨率,保留了 `u8g2_Setup_ssd1306_i2c_128x32_univision_f` ("f" 代表 full buffer 模式)。删除文件中其他的 `u8g2_Setup_...` 函数定义。
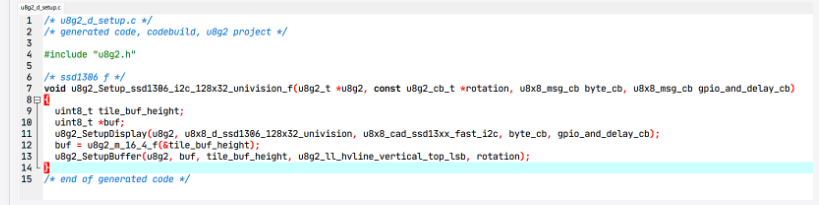
原因: 与驱动文件类似,`setup` 文件也包含了对应各种硬件组合的初始化代码。每个 `Setup` 函数都包含了特定的配置序列和对底层驱动、内存管理函数的调用。只保留与我们硬件 (SSD1306)、接口 (I2C)、分辨率 (128x32) 以及选择的缓冲模式 (Full Buffer 'f') 相匹配的那个 Setup 函数,可以进一步减小代码体积。
-
修改 `u8g2_d_memory.c` 文件。此文件包含不同缓冲区大小的内存管理函数 (`u8g2_m_...`)。你选择的 `Setup` 函数(上一步保留的)内部会调用一个特定的内存管理函数来分配显存缓冲区。例如,`u8g2_Setup_ssd1306_i2c_128x32_univision_f` 函数内部会调用 `u8g2_m_16_4_f`,这个函数名代表缓冲区大小:16 bytes/row * 4 rows = 64 bytes。对于 128x32 的屏幕,每个字节存 8 个像素,所以需要 128*32/8 = 512 bits = 64 bytes 的缓冲区,正好对应 `16_4` (16*8=128 像素宽,4*8=32 像素高)。为了节省空间,只保留这个被调用的内存函数 (`u8g2_m_16_4_f`),删除其他 `u8g2_m_...` 函数定义。
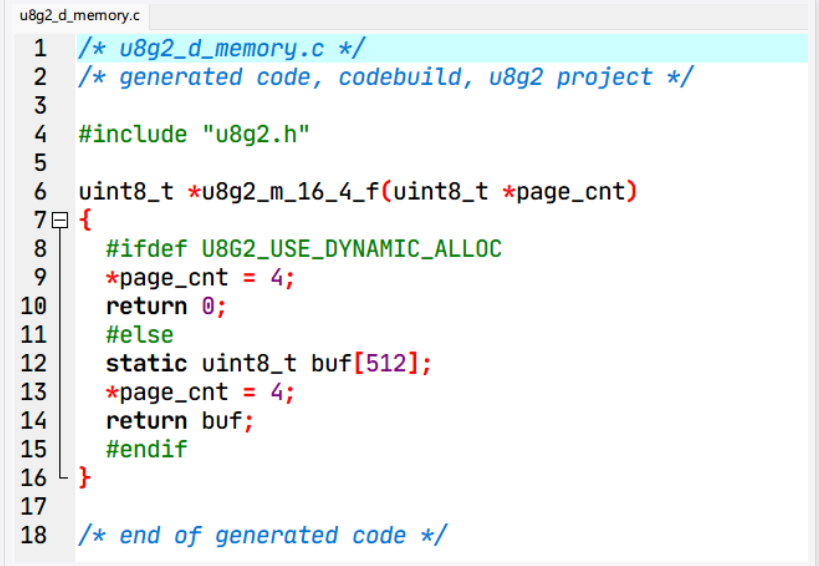
原因: 不同的缓冲模式(全缓冲、页缓冲)需要不同大小的 RAM 缓冲区。`memory.c` 文件提供了管理这些不同大小缓冲区的函数。由于我们已经确定使用全缓冲模式 (`_f` 后缀的 Setup 函数),并且该 Setup 函数只会调用一个特定的内存管理函数 (`u8g2_m_16_4_f`),因此其他内存管理函数都是冗余的,可以删除以节省 Flash。
-
在你的项目 `Components` 文件夹下创建一个 `u8g2` 子文件夹,并将经过上述裁剪处理后的 `csrc` 文件夹中的所有剩余 `.c` 和 `.h` 文件复制到 `Components/u8g2` 中。
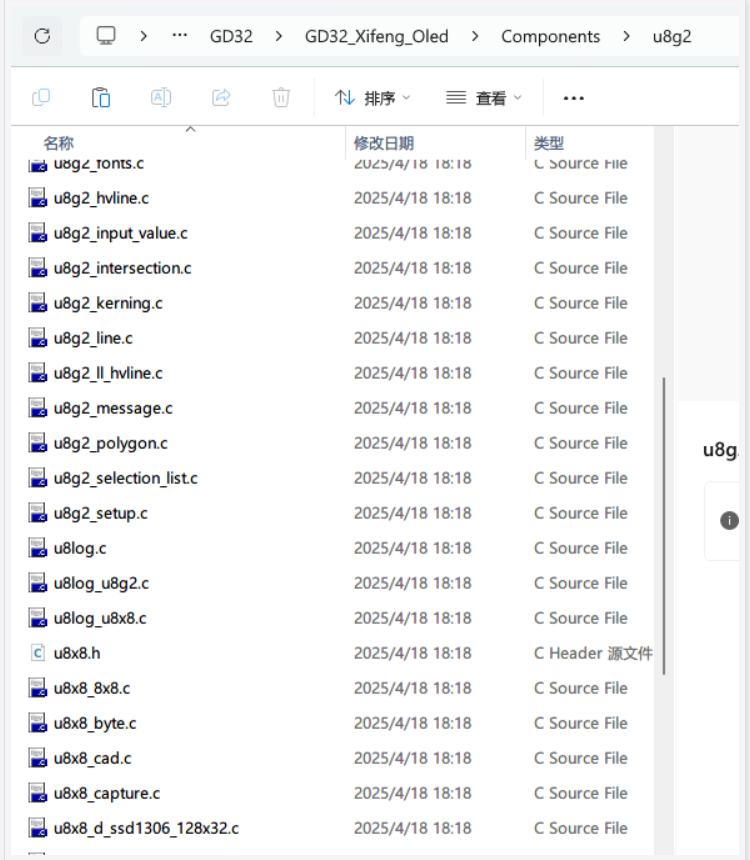
原因: 这是良好的项目组织习惯。将第三方库文件放在一个独立的目录(如 `Components/u8g2`)有助于保持项目结构的清晰,方便管理和未来的更新,避免与你自己的应用代码混淆。
5.2 引用文件 (以 Keil MDK 为例)
-
添加文件到工程:
- 在 Keil Project 窗口中,创建一个新分组 (如 `Components/u8g2`)。
- 右键点击该分组,选择 "Add Existing Files to Group..."。
- 导航到 `Components/u8g2` 文件夹,选择所有 `.c` 文件并添加。
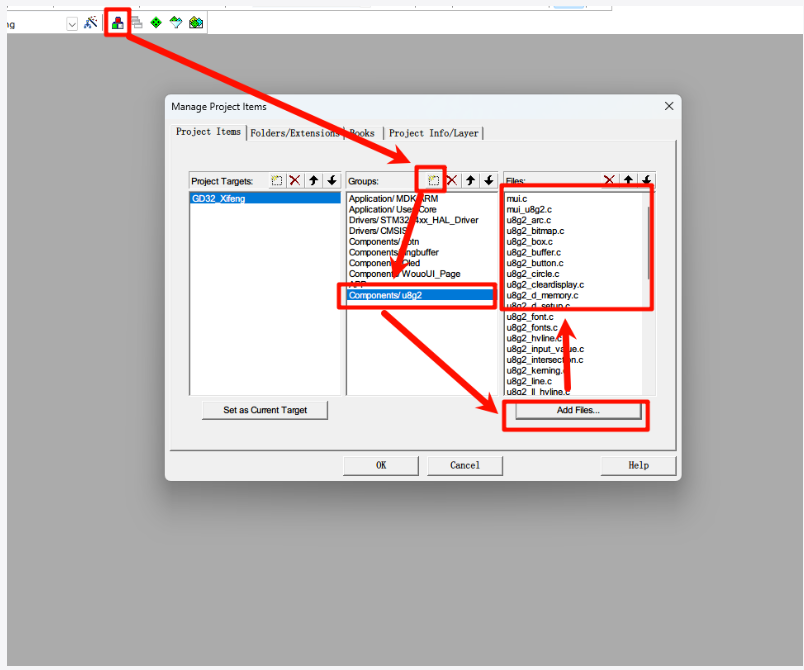
原因: 仅仅将源文件复制到项目文件夹是不够的。你需要告诉 IDE (如 Keil) 这些 `.c` 文件是项目的一部分,需要被编译器编译,并最终链接到可执行固件中。通过 "Add Existing Files..." 操作完成这一步。
-
添加头文件路径:
- 点击魔术棒 (Options for Target)。
- 切换到 "C/C++" 选项卡。
- 在 "Include Paths" 中添加 `Components/u8g2` 文件夹的路径。
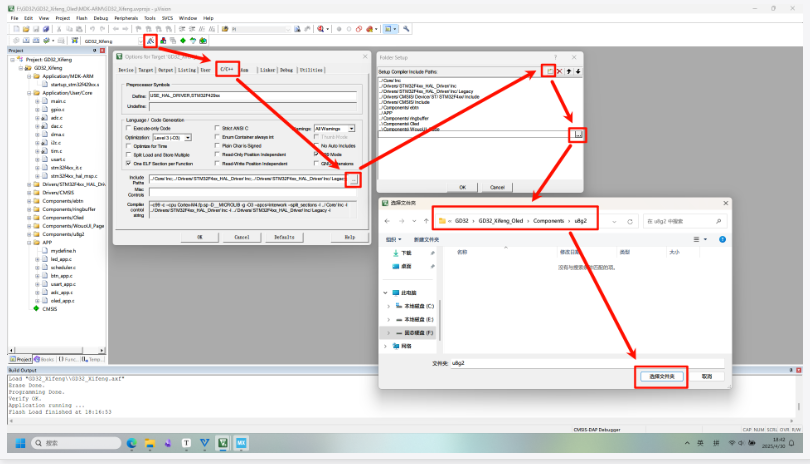
原因: 当你在自己的代码中 (如 `main.c` 或 `oled_app.c`) 写入 `#include "u8g2.h"` 时,编译器需要知道去哪里查找这个 `u8g2.h` 文件。通过在 "Include Paths" 中添加 `Components/u8g2` 路径,你告诉编译器在这个目录下搜索所需的头文件。
5.3 编写平台相关的回调函数
u8g2 通过回调函数与底层硬件交互(GPIO 控制和通信)。我们需要为 STM32 HAL 库实现这些回调函数。u8g2 将硬件交互分为两类:GPIO 及延时操作、字节传输操作(如 I2C, SPI)。我们需要根据选择的接口(这里是硬件 I2C)编写对应的回调函数。
原因: u8g2 库本身是平台无关的,它不知道你使用的是 STM32、ESP32 还是其他 MCU,也不知道你使用的是 HAL 库、LL 库还是寄存器操作。为了让 u8g2 能在你的特定平台上工作,你需要提供一组符合 u8g2 接口规范的回调函数,这些函数内部调用你平台(STM32 HAL)的 API 来完成实际的硬件操作(如 I2C 发送、延时等)。这是一种典型的硬件抽象层 (HAL) 或适配层 (Adapter) 的设计模式,实现了库与具体硬件的解耦。
参考 u8g2 官方移植指南 获取更详细的说明。
在你的项目(例如,可以放在 `oled_app.c` 或新建一个 `u8g2_port.c` 文件)中实现以下两个函数:
cpp
#include "u8g2.h"
#include "main.h" // 确保包含了 HAL 库和 I2C 定义
#include "i2c.h" // 确保包含 I2C 句柄定义 (例如 hi2c1)
// u8g2 的 GPIO 和延时回调函数
uint8_t u8g2_gpio_and_delay_stm32(u8x8_t *u8x8, uint8_t msg, uint8_t arg_int, void *arg_ptr)
{
switch(msg)
{
case U8X8_MSG_GPIO_AND_DELAY_INIT:
// 初始化 GPIO (如果需要,例如 SPI 的 CS, DC, RST 引脚)
// 对于硬件 I2C,这里通常不需要做什么
break;
case U8X8_MSG_DELAY_MILLI:
// 原因: u8g2 内部某些操作需要毫秒级的延时等待。
// 提供毫秒级延时,直接调用 HAL 库函数。
HAL_Delay(arg_int);
break;
case U8X8_MSG_DELAY_10MICRO:
// 原因: 某些通信协议或显示时序可能需要微秒级延时。
// 提供 10 微秒延时。HAL_Delay(1) 精度不够(通常是毫秒级)。
// 需要更精确的延时,可以使用 CPU NOP 指令或 DWT 定时器。
// 以下简单循环仅为示例,**需要根据你的 CPU 时钟频率精确调整循环次数**。
for (volatile uint32_t i = 0; i < 150; ++i) {} // 示例循环,计数需调整
break;
case U8X8_MSG_DELAY_100NANO:
// 原因: 更精密的时序控制,通常在高速接口或特定操作中需要。
// 提供 100 纳秒延时。非常短,通常用 NOP 指令实现。
// **同样需要根据 CPU 时钟频率调整 NOP 数量**。
__NOP(); __NOP(); __NOP(); // 示例 NOP
break;
case U8X8_MSG_GPIO_I2C_CLOCK: // [[fallthrough]] // Fallthrough 注释表示有意为之
case U8X8_MSG_GPIO_I2C_DATA:
// 控制 SCL/SDA 引脚电平。这些仅在**软件模拟 I2C** 时需要实现。
// 使用硬件 I2C 时,这些消息可以忽略,由 HAL 库处理。
break;
// --- 以下是 GPIO 相关的消息,主要用于按键输入或 SPI 控制 ---
// 如果你的 u8g2 应用需要读取按键或控制 SPI 引脚 (CS, DC, Reset),
// 你需要在这里根据 msg 类型读取/设置对应的 GPIO 引脚状态。
// 对于仅使用硬件 I2C 显示的场景,可以像下面这样简单返回不支持。
case U8X8_MSG_GPIO_CS:
// SPI 片选控制
break;
case U8X8_MSG_GPIO_DC:
// SPI 数据/命令线控制
break;
case U8X8_MSG_GPIO_RESET:
// 显示屏复位引脚控制
break;
case U8X8_MSG_GPIO_MENU_SELECT:
u8x8_SetGPIOResult(u8x8, /* 读取选择键 GPIO 状态 */ 0);
break;
default:
u8x8_SetGPIOResult(u8x8, 1); // 不支持的消息
break;
}
return 1;
}
// u8g2 的硬件 I2C 通信回调函数
uint8_t u8x8_byte_hw_i2c(u8x8_t *u8x8, uint8_t msg, uint8_t arg_int, void *arg_ptr)
{
static uint8_t buffer[32]; // u8g2 每次传输最大 32 字节
static uint8_t buf_idx;
uint8_t *data;
switch(msg)
{
case U8X8_MSG_BYTE_SEND:
// 原因: u8g2 通常不会一次性发送大量数据,而是分块发送。
// 这个消息用于将一小块数据 (arg_int 字节) 从 u8g2 内部传递到我们的回调函数。
// 我们需要将这些数据暂存到本地 buffer 中,等待 START/END_TRANSFER 信号。
data = (uint8_t *)arg_ptr;
while( arg_int > 0 )
{
buffer[buf_idx++] = *data;
data++;
arg_int--;
}
break;
case U8X8_MSG_BYTE_INIT:
// 原因: 提供一个机会进行 I2C 外设的初始化。
// 初始化 I2C (通常在 main 函数中已完成)
// 由于我们在 main 函数中已经调用了 MX_I2C1_Init(),这里通常可以留空。
break;
case U8X8_MSG_BYTE_SET_DC:
// 原因: 这个消息用于 SPI 通信中控制 Data/Command 选择引脚。
// 设置数据/命令线 (I2C 不需要)
// I2C 通过特定的控制字节 (0x00 或 0x40) 区分命令和数据,因此该消息对于 I2C 无意义。
break;
case U8X8_MSG_BYTE_START_TRANSFER:
// 原因: 标记一个 I2C 传输序列的开始。
buf_idx = 0;
// 我们在这里重置本地缓冲区的索引,准备接收新的数据块。
break;
case U8X8_MSG_BYTE_END_TRANSFER:
// 原因: 标记一个 I2C 传输序列的结束。
// 此时,本地 buffer 中已经暂存了所有需要发送的数据块。
// 这是执行实际 I2C 发送操作的最佳时机。
// 发送缓冲区中的数据
// 注意: u8x8_GetI2CAddress(u8x8) 返回的是 7 位地址 * 2 = 8 位地址
if (HAL_I2C_Master_Transmit(&hi2c1, u8x8_GetI2CAddress(u8x8), buffer, buf_idx, 100) != HAL_OK)
{
return 0; // 发送失败
}
break;
default:
return 0;
}
return 1;
}注意:
- 请将上述代码中的 `&hi2c1` 替换为你实际使用的 I2C 句柄。
- 确保 `main.h` 或 `mydefine.h` 中包含了 `u8g2.h`。
- 如果你的回调函数放在单独的 `.c` 文件中,需要在头文件中声明它们,并在使用 u8g2 的地方包含该头文件。
- `U8X8_MSG_DELAY_10MICRO` 和 `U8X8_MSG_DELAY_100NANO` 的延时实现需要根据你的 MCU 时钟频率精确调整,或者使用 DWT 定时器等更精确的方法。简单的 `HAL_Delay(1)` 对于微秒级延时来说太长了。
5.4 初始化 u8g2
-
声明 u8g2 结构体: 在全局范围(例如 `oled_app.c` 或 `main.c`)声明一个 `u8g2_t` 类型的结构体变量。如果需要在多个文件访问,使用 `extern`。
原因: `u8g2_t` 结构体是 u8g2 库的核心,它包含了显示屏的配置信息、指向底层回调函数的指针、内部状态以及显存缓冲区(如果是缓冲模式)等所有信息。我们需要创建一个这个类型的实例,后续所有 u8g2 API 调用都需要传递这个实例的指针 (`&u8g2`)。声明为全局变量使得它可以在初始化代码 (`main.c`) 和显示任务代码 (`oled_app.c`) 中共享访问。如果定义在一个 `.c` 文件中,需要在其他需要访问它的文件中使用 `extern` 关键字声明。
cpp// 在 oled_app.c 或 main.c #include "u8g2.h" u8g2_t u8g2; // 全局 u8g2 实例 // 如果在 oled_app.c 定义,在 oled_app.h 中声明: // extern u8g2_t u8g2;根据参考文档,如果在 `oled_task.c`(假设为 `oled_app.c`)中定义 `u8g2_t u8g2;`,则需要在 `mydefine.h`(或其他公共头文件)中添加 `extern u8g2_t u8g2;` 声明,以便 `main.c` 可以访问它进行初始化。
-
调用初始化函数: 在 `main.c` 的 `main` 函数中,替换掉之前 `OLED_Init()` 的调用 ,改为使用 u8g2 的初始化序列。这通常包括三个步骤:`setup`, `init display`, `set power save`。
原因: 初始化 u8g2 是一个标准流程,必须在使用任何绘图 API 之前完成:
- `u8g2_Setup_...()`: 这是配置的核心。它将 `u8g2_t` 结构体与具体的硬件驱动、通信方式(通过回调函数指针)和缓冲模式关联起来。必须选择与硬件和回调函数完全匹配的 Setup 函数,否则无法正确工作。
- `u8g2_InitDisplay()`: 这个函数会通过之前设置的回调函数,向 OLED 控制器 (SSD1306) 发送一系列初始化命令(类似于第 2.4 节描述的序列),配置其内部寄存器,使其准备好接收显示数据。
- `u8g2_SetPowerSave(0)`: SSD1306 初始化后可能处于省电模式(屏幕关闭)。调用这个函数并传入参数 0 会发送命令 (
0xAF) 来唤醒屏幕,使其正常显示。
cpp// main.c #include "u8g2.h" #include "mydefine.h" // 假设 extern u8g2_t u8g2; 在这里,或者直接包含定义了 u8g2 的头文件 // 声明回调函数原型 (如果定义在其他 .c 文件) uint8_t u8g2_gpio_and_delay_stm32(u8x8_t *u8x8, uint8_t msg, uint8_t arg_int, void *arg_ptr); uint8_t u8x8_byte_hw_i2c(u8x8_t *u8x8, uint8_t msg, uint8_t arg_int, void *arg_ptr); int main(void) { // ... HAL_Init(), SystemClock_Config(), MX_GPIO_Init() ... MX_I2C1_Init(); // 确保 I2C 初始化在前 // u8g2 初始化 // 1. Setup: 这是最关键的一步,它配置了 u8g2 实例。 // - 选择与硬件匹配的 setup 函数 (SSD1306, I2C, 128x32, Full Buffer)。 // - &u8g2: 指向要配置的 u8g2 结构体实例的指针。 // - U8G2_R0: 旋转设置。U8G2_R0=0°, U8G2_R1=90°, U8G2_R2=180°, U8G2_R3=270°。 // - u8x8_byte_hw_i2c: 指向你的硬件 I2C 字节传输回调函数的指针。 // - u8g2_gpio_and_delay_stm32: 指向你的 GPIO 和延时回调函数的指针。 u8g2_Setup_ssd1306_i2c_128x32_univision_f(&u8g2, U8G2_R0, u8x8_byte_hw_i2c, u8g2_gpio_and_delay_stm32); // - &u8g2: u8g2 结构体指针 // - U8G2_R0: 旋转设置 (0度) // 2. Init Display: 发送初始化序列到 OLED u8g2_InitDisplay(&u8g2); // 3. Set Power Save: 唤醒屏幕。 // - 参数 0 表示关闭省电模式 (屏幕亮起)。 // - 参数 1 表示进入省电模式 (屏幕熄灭)。 u8g2_SetPowerSave(&u8g2, 0); // (可选) 4. Clear Display: 清空屏幕物理显存。 // - 这个函数会立即发送清屏命令到设备。 // - 注意与 `u8g2_ClearBuffer` 的区别,后者仅清空内存中的缓冲区。 // u8g2_ClearDisplay(&u8g2); // ... 其他初始化 ... while (1) { // ... 主循环 ... } }重要: 确保调用的 `u8g2_Setup_...` 函数与你在 5.1 步骤中保留的 setup 函数一致,并且与你的 OLED 屏幕型号 (SSD1306)、接口 (I2C)、分辨率 (128x32) 匹配。 `U8G2_R0` 表示无旋转,你可以根据需要选择 `U8G2_R1`, `U8G2_R2`, `U8G2_R3` 进行旋转。
5.5 测试 u8g2 显示
完成初始化后,就可以使用 u8g2 提供的丰富 API 来绘制图形和文本了。以下步骤展示了如何创建一个简单的显示任务并进行测试。
5.5.1 编写显示任务函数
修改之前的 `oled_task` 函数(或创建一个新的函数),用于执行具体的绘图操作。u8g2 (在全缓冲模式下) 的基本绘图流程如下:
- 清除缓冲区: 使用
u8g2_ClearBuffer()清空 MCU RAM 中的图形缓冲区。 - 执行绘图: 调用各种
u8g2_Draw...()函数(如绘制文本、线条、形状等)将内容绘制到缓冲区中。 - 发送缓冲区: 使用
u8g2_SendBuffer()将 RAM 缓冲区中的最终画面一次性通过 I2C 发送到 OLED 屏幕。
以下是一个示例任务代码:
cpp
// 在 oled_app.c (或包含 u8g2 定义的文件)
#include "u8g2.h"
#include "mydefine.h" // 确保包含 extern u8g2_t u8g2;
/* u8g2 显示任务示例 */
void oled_task(void) // 或者你定义的任务函数名
{
// --- 准备阶段 ---
// 设置绘图颜色 (对于单色屏,1 通常表示点亮像素)
u8g2_SetDrawColor(&u8g2, 1);
// 选择要使用的字体 (确保字体文件已添加到工程)
u8g2_SetFont(&u8g2, u8g2_font_ncenB08_tr); // ncenB08: 字体名, _tr: 透明背景
// --- 核心绘图流程 ---
// 1. 清除内存缓冲区 (非常重要,每次绘制新帧前必须调用)
u8g2_ClearBuffer(&u8g2);
// 2. 使用 u8g2 API 在缓冲区中绘图
// 所有绘图操作都作用于 RAM 中的缓冲区。
// 绘制字符串 (参数: u8g2实例, x坐标, y坐标, 字符串)
// y 坐标通常是字符串基线的位置。
u8g2_DrawStr(&u8g2, 2, 12, "Hello u8g2!"); // 从 (2, 12) 开始绘制
u8g2_DrawStr(&u8g2, 2, 28, "Micron Elec Studio"); // 绘制第二行
// 绘制图形 (示例:一个空心圆和一个实心框)
// 绘制圆 (参数: u8g2实例, 圆心x, 圆心y, 半径, 绘制选项)
u8g2_DrawCircle(&u8g2, 90, 19, 10, U8G2_DRAW_ALL); // U8G2_DRAW_ALL 画圆周
// 绘制实心框 (参数: u8g2实例, 左上角x, 左上角y, 宽度, 高度)
// u8g2_DrawBox(&u8g2, 50, 15, 20, 10);
// 绘制空心框 (参数: u8g2实例, 左上角x, 左上角y, 宽度, 高度)
// u8g2_DrawFrame(&u8g2, 50, 15, 20, 10);
// 3. 将缓冲区内容一次性发送到屏幕 (非常重要)
// 这个函数会调用我们之前编写的 I2C 回调函数,将整个缓冲区的数据发送出去。
u8g2_SendBuffer(&u8g2);
}5.5.2 理解绘图流程与字体
流程:
u8g2_ClearBuffer(&u8g2);: 必须步骤。清空 RAM 缓冲区,为绘制新的一帧做准备。否则新内容会叠加在旧内容上。- (可选)
u8g2_Set...(): 设置绘图属性,如u8g2_SetFont()选择字体,u8g2_SetDrawColor()设置绘图颜色 (单色屏通常用 1)。 u8g2_Draw...(): 使用各种绘图函数(如 `u8g2_DrawStr`, `u8g2_DrawBox`, `u8g2_DrawLine`, `u8g2_DrawPixel` 等)在缓冲区中"作画"。坐标系原点 (0,0) 通常在左上角。u8g2_SendBuffer(&u8g2);: 必须步骤。将 RAM 缓冲区的内容通过底层 I2C (或 SPI) 回调函数发送到屏幕硬件,实际更新显示。
字体:
- u8g2 提供了极其丰富的字体库。
- 要使用某个字体,你需要从 u8g2 源码的 `tools/font/build/fonts` 目录中找到对应的字体
.c文件 (例如u8g2_font_ncenB08_tr.c)。 - 将这个字体
.c文件添加到你的 Keil (或其他 IDE) 工程中,就像添加其他源文件一样。 - 在代码中,使用
u8g2_SetFont(&u8g2, 字体名);(例如u8g2_SetFont(&u8g2, u8g2_font_ncenB08_tr);) 来启用该字体。后续的u8g2_DrawStr等函数就会使用这个字体进行渲染。 - 不同字体占用不同的 Flash 大小,选择时需要考虑资源限制。
5.5.3 集成与调用
确保你编写的 `oled_task` (或类似名称的) 函数被周期性调用。这可以通过以下方式实现:
- 在主循环中直接调用: 如果你的项目没有使用 RTOS 或任务调度器,可以在 `main.c` 的 `while(1)` 循环中直接调用
oled_task();,并加上适当的延时HAL_Delay(100);(例如 100ms 刷新一次)。 - 添加到任务调度器: 如果你使用了类似 `scheduler.c` 的简单调度器,将 `oled_task` 添加到任务列表,并设置合适的执行间隔。
- 创建 RTOS 任务: 如果使用了 FreeRTOS 等实时操作系统,创建一个专门用于 OLED 显示的任务,在该任务的循环中调用 `oled_task()` 并使用 OS 提供的延时函数 (如 `vTaskDelay`)。
5.5.4 编译、下载与观察

- 编译工程: 重新编译整个项目。原因: 将所有修改(包括添加的 u8g2 源文件、回调函数、字体文件和调用代码)转换成 MCU 可以执行的机器码。确保没有编译错误(特别是字体文件是否正确添加、函数调用是否匹配)。
- 下载程序: 将生成的可执行文件下载到你的 STM32 开发板。原因: 将编译好的固件烧录到 MCU 的 Flash 中。
- 观察结果: 如果一切顺利,你的 OLED 屏幕应该会根据 `oled_task` 函数中的绘图指令显示相应的文本和图形(例如参考文档中最后的那个圆圈示例图)。原因: 验证移植和测试代码是否成功。
⚠️调试提示: 如果 u8g2 未能正常工作:
- 回调函数检查: 再次确认回调函数 (`u8g2_gpio_and_delay_stm32`, `u8x8_byte_hw_i2c`) 实现,特别是延时精度(虽然对于简单显示影响不大)和 `HAL_I2C_Master_Transmit` 调用中的 I2C 句柄、设备地址是否正确无误。可以尝试在回调函数中加入打印信息(如果使用了 UART)来调试。
- Setup 函数选择: 这是最常见的错误来源之一。务必确保 `u8g2_Setup_...` 函数的名字与你的硬件(SSD1306)、接口(I2C)、分辨率(128x32)以及缓冲模式(`_f` 代表全缓冲)完全匹配。
- 初始化顺序: 确保 `MX_I2C1_Init()` 在 `u8g2_Setup_...`, `u8g2_InitDisplay`, `u8g2_SetPowerSave` 之前被调用。
- 全局变量声明: 检查 `u8g2_t u8g2;` 是否在所有使用它的文件(包括 `main.c` 和 `oled_app.c`)中都可见(通过 `extern` 或放在公共头文件)。
- 缓冲区流程: 对于全缓冲模式,必须遵循 `ClearBuffer -> Draw... -> SendBuffer` 的流程。忘记 `ClearBuffer` 会导致画面重叠,忘记 `SendBuffer` 则屏幕无任何更新。
- 字体包含: 如果使用了特定字体 (`u8g2_SetFont`),务必将对应的字体 `.c` 文件添加到 Keil 工程并重新编译。
- 内存/栈大小: 全缓冲模式会占用等于屏幕像素位数的 RAM (128x32 / 8 = 64 Bytes)。虽然不多,但要确保 MCU 有足够 RAM。同时检查调用 `oled_task` 的任务(如果是 RTOS)或主循环是否有足够的栈空间,因为 u8g2 函数调用和缓冲区也需要栈。
- I2C 地址确认: 再次核对 OLED 模块的实际 I2C 地址(通常是 0x78 或 0x7A),并确保 `u8x8_GetI2CAddress(&u8g2)` 返回的值是正确的 8 位地址。可以在 `u8x8_byte_hw_i2c` 回调中打印 `u8x8_GetI2CAddress(u8x8)` 的值来确认。
六、菜单系统:移植 WouoUI-Page
当需要在嵌入式项目中实现用户交互菜单时,一个结构良好、易于移植和使用的菜单框架能极大提高开发效率。WouoUI-Page (Github) 就是这样一款轻量级的嵌入式菜单框架。
主要特点 (根据参考文档):
- 移植方便: 所有核心文件都在一个文件夹内。
- 配置简单: 提供清晰易懂的配置文件 (`WouoUI_conf.h`)。
- 注释完善: 代码注释有助于理解。
- 配置项丰富: 可定制菜单外观和行为。
- 按键灵活: 易于与现有的按键检测逻辑集成。
本章节将详细介绍如何将 WouoUI-Page 移植到我们的项目中,假设你已经成功驱动了 OLED 显示屏 (例如使用第 4 节的基础驱动或第 5 节的 u8g2)。
6.1 准备文件
-
在项目的 `Components` 组件文件夹中,新建一个 `WouoUI_Page` 文件夹。
原因: 保持项目结构清晰,将第三方库文件与项目自身代码分离,便于管理和维护。
-
从 Github 仓库中下载源文件的压缩包。
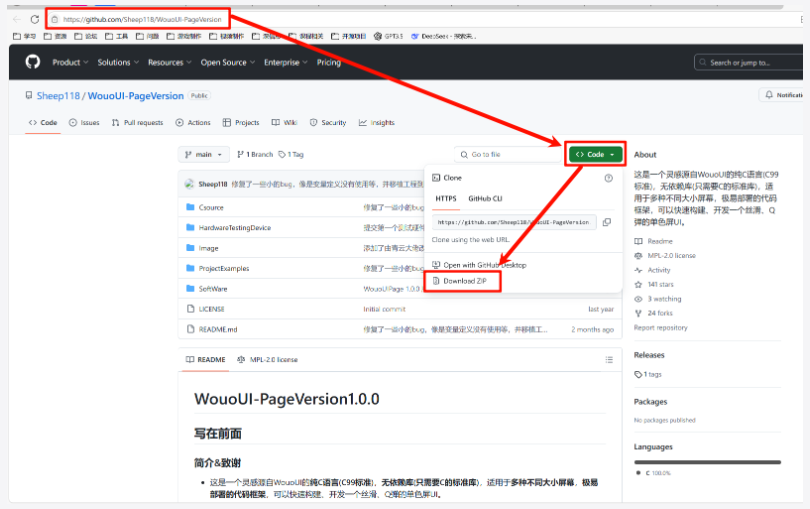
原因: 获取 WouoUI-Page 框架的源代码,以便将其集成到我们的固件中。
-
解压后将 `Csource` 文件夹中的所有 `.c` 和 `.h` 文件,全部复制到第一步创建的文件夹 `Components/WouoUI_Page` 中。
原因: 将框架的源文件放置到项目中指定的位置。参考文档建议使用其提供的修改版压缩包,可能已针对特定屏幕 (0.91 寸) 和编码 (GB2312) 进行了预配置,并包含示例菜单。
6.2 引用文件 (以 Keil MDK 为例)
-
添加文件到工程:
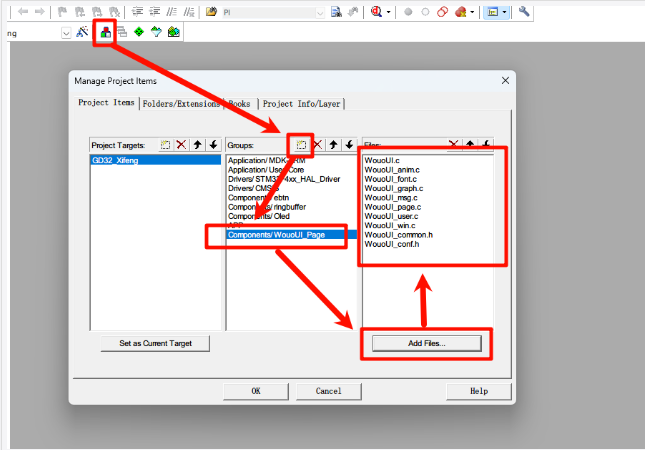
- 在 Keil Project 窗口中,创建一个新分组 (如 `Components/WouoUI_Page`)。
- 右键点击该分组,选择 "Add Existing Files to Group..."。
- 导航到 `Components/WouoUI_Page` 文件夹,选择所有 `.c` 文件并添加。
原因: 告知 IDE 需要编译这些 WouoUI-Page 的源文件,并将它们链接到最终的固件中。
-
添加头文件路径:
- 点击魔术棒 (Options for Target)。
- 切换到 "C/C++" 选项卡。
- 在 "Include Paths" 中添加 `Components/WouoUI_Page` 文件夹的路径。
原因: 让编译器在处理 `#include "WouoUI.h"` 等指令时,能够找到这些头文件所在的目录。
6.3 实现缓存刷新函数
WouoUI-Page 菜单框架本身不直接操作硬件,它将绘制好的菜单界面存储在一个缓冲区中。你需要提供一个函数,该函数能接收这个缓冲区,并将其内容发送到 OLED 屏幕上显示出来。函数的接口由 WouoUI-Page 定义。
原因: 这是框架与具体显示驱动解耦的关键。WouoUI-Page 只负责生成菜单的像素数据,而如何将这些数据显示到屏幕上,则由用户提供的这个"刷新函数"决定。这样,WouoUI-Page 就可以适配各种不同的 OLED 驱动(如基础驱动、u8g2 驱动等)。
如果你使用的是本教程第 4 节介绍的基础 OLED 驱动,可以实现如下函数(假设屏幕是 128x32,即 4 页):
cpp
#include "oled.h" // 假设你的基础驱动头文件是 oled.h
/**
* @brief 将 WouoUI 缓冲区的数据发送到 OLED 显示
* @param buff WouoUI 提供的缓冲区指针,大小为 [高度/8][宽度] 或 [4][128] for 128x32
*/
void OLED_SendBuff(uint8_t buff[4][128])
{
// 遍历每一页 (0-3)
for(uint8_t page = 0; page < 4; page++)
{
// 设置 OLED 的页地址
OLED_Write_cmd(0xb0 + page); // 0xB0 - 0xB3
// 设置 OLED 的列地址 (从第 0 列开始)
OLED_Write_cmd(0x00); // 低半字节列地址
OLED_Write_cmd(0x10); // 高半字节列地址 (0x10 | 0 = 0)
// 循环写入该页的 128 列数据
for (uint8_t column = 0; column < 128; column++)
{
// 从 WouoUI 缓冲区取数据,并通过基础驱动的数据写入函数发送
OLED_Write_data(buff[page][column]);
}
}
}⚠️注意:此处的 `OLED_Write_cmd` 和 `OLED_Write_data` 是你基础 OLED 驱动库提供的函数,你需要根据实际情况调整。缓冲区 `buff` 的维度也需要与你的屏幕和 WouoUI 配置匹配。
6.4 配置菜单 (WouoUI_conf.h)
WouoUI-Page 的主要配置都在 `WouoUI_conf.h` 文件中完成。你需要根据你的硬件和需求修改这些配置。
原因: 这个配置文件允许你定制菜单的外观(屏幕尺寸、字体、图标、间距等)和行为,而无需修改框架的核心代码,提高了可维护性和易用性。
以下是针对 0.91 寸 (128x32) OLED 的一些关键配置修改示例(根据参考文档):
-
屏幕尺寸适配: 修改宏定义以匹配你的屏幕分辨率。
cpp/* WouoUI_conf.h - sekitar baris 14-15 */ //---------------------与UI相关的参数 #define WOUOUI_BUFF_WIDTH 128 // 屏幕宽 (保持 128) #define WOUOUI_BUFF_HEIGHT 32 // 屏幕高 (修改为 32)原因: 告诉框架它需要处理的画布大小,以便正确分配缓冲区和计算布局。
-
调整图标和磁贴样式: 参考文档建议修改一系列与磁贴(Tile)相关的参数,目的是在图标下方不显示标题磁贴(可能因为 32 像素高度空间不足)。
cpp/* WouoUI_conf.h - sekitar baris 26-39 */ //------------------与title页面相关的默认参数 #define DEFAULT_TILE_B_TITLE_FNOT 0 // 磁贴大标题字体 (设置为 0 可能表示禁用或隐藏) #define DEFAULT_TILE_ICON_W 30 // 磁贴图标宽度 #define DEFAULT_TILE_ICON_H 30 // 磁贴图标高度 (接近屏幕高度) #define DEFAULT_TILE_ICON_IND_U 0 // 磁贴指示器与磁贴的上边距 #define DEFAULT_TILE_ICON_IND_D 2 // 磁贴指示器与磁贴的下边距 #define DEFAULT_TILE_ICON_IND_L 2 // 磁贴指示器与磁贴的左边距 #define DEFAULT_TILE_ICON_IND_R 2 // 磁贴指示器与磁贴的右边距 #define DEFAULT_TILE_ICON_IND_SL 5 // 磁贴指示器边长SideLength #define DEFAULT_TILE_ICON_S 6 // 磁贴图标间距(图标边和边的距离) #define DEFAULT_TILE_BAR_D 2 // 磁贴装饰条下边距 #define DEFAULT_TILE_BAR_W 0 // 磁贴装饰条宽度 (设置为 0 可能表示禁用) #define DEFAULT_TILE_BAR_H 0 // 磁贴装饰条高度 (设置为 0 可能表示禁用) #define DEFAULT_TILE_SLIDESTR_MODE 2 // 磁贴标题文本的滚动模式原因: 这些宏定义控制了主菜单界面(通常是图标或磁贴形式)的布局和元素尺寸。通过调整这些值,可以使菜单界面适应不同大小的屏幕并达到期望的视觉效果。将某些尺寸设为 0 通常是禁用对应元素的一种方式。
⚠️ 参考文档提示:将 `DEFAULT_TILE_B_TITLE_FNOT` 设置为 0 后,可能会导致编译错误。需要找到报错的语句(可能在 `WouoUI.c` 或相关文件中)并将其注释掉。原因: 这可能是因为代码中存在对字体 0 的无效引用或处理逻辑。注释掉相关代码是临时的解决方案,更好的方法是理解该配置项的意图并相应修改代码逻辑。
-
其他配置: `WouoUI_conf.h` 中还有许多其他配置项,例如字体选择、颜色(对单色屏意义不大但可能影响反显)、动画效果等,你可以根据需要进一步探索和调整。
6.5 初始化及调用
-
包含头文件: 在你的主要头文件(如 `main.h` 或 `mydefine.h`)中包含 WouoUI 的核心头文件和用户菜单定义头文件。
cpp// mydefine.h 或 main.h #include "WouoUI.h" // WouoUI 核心框架 #include "WouoUI_user.h" // 用户自定义的菜单结构和回调函数 (通常需要用户创建或修改)原因: 使得你的代码能够调用 WouoUI 框架提供的函数,并能访问用户定义的菜单项。
-
修改 Oled 显示任务函数: 将你之前的 Oled 显示逻辑(例如 `oled_task`)替换为调用 WouoUI 的主处理函数 `WouoUI_Proc()`。
cpp/* Oled 显示任务 (例如 oled_app.c) */ void oled_task(void) { // 调用 WouoUI 处理函数,参数为两次调用之间的间隔时间 (ms) // 这个函数会处理按键输入、更新菜单状态、绘制缓冲区 WouoUI_Proc(10); // 假设任务每 10ms 调用一次 }原因: `WouoUI_Proc()` 是菜单框架的"引擎"。你需要周期性地调用它,它会检查是否有按键消息、更新菜单状态(如高亮项、页面切换)、根据当前状态重新绘制菜单界面到内部缓冲区,并在需要时(状态变化后)调用你绑定的刷新函数来更新屏幕。传入的时间间隔参数有助于框架处理动画和定时事件。
💡 性能提示:如果 `WouoUI_Proc()` 执行时间较长或包含阻塞操作(如效率低的刷屏函数),可能会导致系统卡顿。参考文档建议可以将其放在定时器中断回调中执行(例如 10ms 定时中断),以保证固定的调用频率。但这需要注意中断服务程序应尽可能快地执行完毕。cpp// 示例:在 TIM2 中断回调中调用 (需要先配置并启动 TIM2) void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) { if (htim->Instance == TIM2) // 确保是 TIM2 中断 { WouoUI_Proc(10); // 假设 TIM2 配置为 10ms 中断一次 } } // 在 main 函数中初始化后启动定时器中断 // HAL_TIM_Base_Start_IT(&htim2); -
在 main 函数中进行初始化: 在你的主函数 `main()` 中,执行 OLED 初始化之后,需要调用 WouoUI 的初始化相关函数。
cpp// main.c #include "main.h" #include "oled.h" // 或 u8g2.h, 取决于你的显示驱动 #include "WouoUI.h" #include "WouoUI_user.h" // 假设你的缓存刷新函数是 OLED_SendBuff extern void OLED_SendBuff(uint8_t buff[4][128]); int main(void) { // ... 系统初始化 ... OLED_Init(); // 假设调用基础驱动的初始化 // 或者 u8g2 初始化序列... // --- WouoUI 初始化 --- // 1. 选择默认UI (如果 WouoUI_user.c 中定义了多个 UI 实例) WouoUI_SelectDefaultUI(); // 2. 绑定缓存刷新函数 (关键步骤) // 将你实现的 OLED_SendBuff 函数地址传递给 WouoUI 框架 WouoUI_AttachSendBuffFun(OLED_SendBuff); // 3. 初始化用户菜单 (执行 WouoUI_user.c/h 中定义的菜单结构初始化) TestUI_Init(); // 函数名取决于用户文件,通常是初始化页面、列表项等 // --- WouoUI 初始化完成 --- while (1) { // 如果不在中断中调用 WouoUI_Proc,可以在这里调用 // oled_task(); // HAL_Delay(10); // 配合 oled_task 中的 WouoUI_Proc(10) } }原因: 这是将 WouoUI 框架与你的系统连接起来的关键步骤:
- `WouoUI_SelectDefaultUI()`: (如果需要)选择要激活的菜单实例。
- `WouoUI_AttachSendBuffFun()`: **极其重要**。告诉 WouoUI 框架当它完成菜单绘制后,应该调用哪个函数 (`OLED_SendBuff`) 来将缓冲区内容刷新到屏幕上。
- `TestUI_Init()` (或类似名称): 执行用户定义的菜单初始化代码,这部分通常在 `WouoUI_user.c/h` 中实现,用于创建菜单页面、添加列表项、绑定回调函数等。没有这一步,菜单就是空的。
-
解决命名冲突 (如果需要): 参考文档提到,如果基础 OLED 驱动 (`oled.c`, `oledfont.h`) 中有与 WouoUI 库(或其依赖的库)冲突的名称(例如 `F8X16` 字体),需要重命名其中一个以解决冲突。例如,将驱动中的 `F8X16` 改为 `Oled_F8X16`。
原因: C 语言不允许在同一作用域内存在同名的函数或全局变量。如果两个不同的库使用了相同的名称,编译器会报错。重命名是解决此问题的常用方法。
-
编译下载观察: 完成以上步骤后,编译并下载固件。

原因: 验证之前的配置和初始化是否正确。如果一切顺利,你应该能在 OLED 上看到 WouoUI-Page 的初始菜单界面。
6.6 绑定按键操作
菜单需要响应用户的按键输入(上、下、左、右、确认、返回等)才能进行导航和交互。WouoUI-Page 提供了一个消息队列机制来接收按键事件。
原因: WouoUI 框架本身不包含具体的按键驱动代码。它定义了一组标准的菜单操作消息 (`InputMsg` 枚举)。你需要将你项目中实际的按键事件(来自你的按键驱动,如 GPIO 中断、轮询检测、或者像 ebtn 这样的按键库)映射到这些标准消息,并通过 `WOUOUI_MSG_QUE_SEND()` 函数发送给 WouoUI 的消息队列。这样,`WouoUI_Proc()` 函数在执行时就能从队列中获取用户的操作意图,并更新菜单状态。
WouoUI 定义了以下消息类型 (`InputMsg`):
cpp
typedef enum {
msg_up = 0x00, // 上移 / 上一个
msg_down, // 下移 / 下一个
msg_left, // 左移 / 上一个 (混合模式)
msg_right, // 右移 / 下一个 (混合模式)
msg_click, // 确认 / 点击
msg_return, // 返回 / 退出
msg_home, // 回主界面 (可能未完全实现)
msg_none = 0xFF, // 无操作
} InputMsg;你需要在你的按键处理函数中,根据检测到的按键事件,调用 `WOUOUI_MSG_QUE_SEND()` 发送对应的消息。以下是使用 ebtn 按键库的示例(来自参考文档):
cpp
#include "ebtn.h" // 假设使用了 ebtn 库
#include "WouoUI.h"
// ebtn 按键事件回调函数
void prv_btn_event(struct ebtn_btn *btn, ebtn_evt_t evt)
{
// 示例:假设 Button 0 按键单击事件对应菜单"上"操作
if ((btn->key_id == USER_BUTTON_0) && (evt == EBTN_EVT_CLICK))
{
// ... (你自己的其他按键处理,例如切换 LED) ...
// 发送"上"消息给 WouoUI
WOUOUI_MSG_QUE_SEND(msg_up);
}
// 示例:假设 Button 1 按键单击事件对应菜单"下"操作
if ((btn->key_id == USER_BUTTON_1) && (evt == EBTN_EVT_CLICK))
{
// ...
WOUOUI_MSG_QUE_SEND(msg_down);
}
// 示例:假设 Button 2 按键单击事件对应菜单"左"操作
if ((btn->key_id == USER_BUTTON_2) && (evt == EBTN_EVT_CLICK))
{
// ...
WOUOUI_MSG_QUE_SEND(msg_left);
}
// 示例:假设 Button 3 按键单击事件对应菜单"右"操作
if ((btn->key_id == USER_BUTTON_3) && (evt == EBTN_EVT_CLICK))
{
// ...
WOUOUI_MSG_QUE_SEND(msg_right);
}
// 示例:假设 Button 4 按键单击事件对应菜单"返回"操作
if ((btn->key_id == USER_BUTTON_4) && (evt == EBTN_EVT_CLICK))
{
// ...
WOUOUI_MSG_QUE_SEND(msg_return);
}
// 示例:假设 Button 5 按键单击事件对应菜单"确认"操作
if ((btn->key_id == USER_BUTTON_5) && (evt == EBTN_EVT_CLICK))
{
// ...
WOUOUI_MSG_QUE_SEND(msg_click);
}
// 可以添加对长按、双击等事件的处理,并映射到 WouoUI 消息
// if ((btn->key_id == USER_BUTTON_X) && (evt == EBTN_EVT_LONG_PRESS_START)) { ... }
}编译下载后,你应该能够通过按键来控制菜单的上下移动、确认和返回等操作了。
6.7 使用 u8g2 提高刷新效率 (可选)
如果在实际使用中感觉菜单响应迟缓、不够流畅,尤其是在菜单切换或滚动时,这很可能是因为你在 6.3 节实现的 `OLED_SendBuff` 函数效率不高。
原因: 基础的 OLED 驱动通常是逐字节或逐页发送数据,并且每次发送前可能需要设置页地址和列地址,这涉及到多次 I2C 命令传输,相对耗时。而像 u8g2 这样的图形库,其底层通信回调 (`u8x8_byte_hw_i2c`) 通常经过优化,能够更高效地批量发送数据。此外,u8g2 的 `SendBuffer` 函数内部可能包含了更优化的传输策略。
如果你已经移植了 u8g2 (如第 5 节所述),并且 WouoUI 的缓冲区大小与 u8g2 配置的缓冲区大小一致(例如都是 128x32 全缓冲),你可以修改 `OLED_SendBuff` 函数,使其利用 u8g2 的缓冲区和发送机制来提高效率。
前提:
- u8g2 已经成功初始化 (调用了 `u8g2_Setup_...`, `u8g2_InitDisplay`, `u8g2_SetPowerSave`)。
- WouoUI 和 u8g2 都配置为相同的屏幕尺寸和缓冲模式 (例如 128x32 全缓冲)。
修改后的 `OLED_SendBuff` 函数如下:
cpp
#include "u8g2.h" // 需要包含 u8g2 头文件
#include // 需要包含 string.h 以使用 memcpy
// 假设全局 u8g2 实例变量名为 u8g2
extern u8g2_t u8g2;
/**
* @brief 使用 u8g2 的缓冲区和发送函数来刷新 WouoUI 的内容
* @param buff WouoUI 提供的缓冲区指针,大小 [4][128] for 128x32
*/
void OLED_SendBuff(uint8_t buff[4][128])
{
// 1. 获取 u8g2 内部 RAM 缓冲区的指针
uint8_t *u8g2_buffer = u8g2_GetBufferPtr(&u8g2);
// 2. 将 WouoUI 缓冲区的内容完整地复制到 u8g2 的缓冲区中
// 注意:确保两个缓冲区大小完全一致 (4 * 128 bytes)
memcpy(u8g2_buffer, buff, 4 * 128);
// 3. 调用 u8g2 的发送函数,将 u8g2 缓冲区的内容发送到 OLED
// 这将使用 u8g2 配置的高效 I2C 回调函数来完成传输
u8g2_SendBuffer(&u8g2);
}原因: 这个修改利用了 u8g2 可能更优化的底层 I2C/SPI 传输实现。通过 `memcpy` 将 WouoUI 生成的图像数据快速复制到 u8g2 的 RAM 缓冲区,然后调用 `u8g2_SendBuffer()`,让 u8g2 接管实际的硬件发送过程,从而可能获得更流畅的菜单体验。
编译下载这个修改后的版本,体验菜单的流畅度是否有所提升。