
如何选择合适的视觉系统: 云端 vs 边缘
构建计算机视觉系统往往需要做出关键决策:数据应在云端处理还是边缘端处理?不同部署方案在成本、复杂度、延迟和可扩展性 方面存在显著差异。这份指南对比了三种常见的视觉系统架构,覆盖从简单监控到复杂机器人技术等多类应用场景。我们的目标是帮助您理解各种方案的取舍权重并选择合适架构,同时展示一体化方案OAK 4 D (RVC4 **)**为何通常成为稳健的边缘部署中最简单且最具成本效益的选择。
三种主流的架构
我们将评估以下三种方法,它们代表了边缘与云端部署的全部范围:
1.树莓派 + 云
一种低成本物联网设备(例如,带有摄像头模块的树莓派),用于捕捉图像并将所有处理与AI推理任务分配至强大的云服务(如AWS、GCP等)。
**优点:**初期硬件成本最低,利用可扩展的云计算资源。
**缺点:**高延迟(网络往返时间)、依赖互联网连接、持续的云服务费用。
2.NVIDIA Jetson + 深度相机
一种常见的边缘计算方法,使用功能强大的单板计算机(Jetson)进行繁重的人工智能处理,并搭配深度相机(例如Intel RealSense)。
**优点:**实时、低延迟的本地推理、强大的性能、成熟的深度感知。
**缺点:**集成复杂度高(两个设备、布线、驱动程序、同步),多组件硬件成本高,功耗高。
3.OAK 4 D
一个具有集成高性能计算核心(RVC4:6核CPU,48 TOPS AI加速器)的完全独立的边缘 AI 相机。它在设备上运行完整的计算机视觉管道,不需要外部主机。
**优点:**极低的复杂性(一个设备)、超低延迟、简化的扩展、较少的开发量。
**缺点:**前期单位成本较高。
用例对比: 每种系统的适配应用场景
1.自动化传送带快照系统(简单场景)
此任务涉及在触发器上拍摄快照,并运行简单的质量检查或条形码扫描模型。在我们的场景中,每天有约 1000 种 产品通过传送带,这意味着每天大约1000 次检测和1000 次对云API 的请求。它是间歇性的,并且在每个项目的基础上相对简单,但请求量在延迟和成本方面很快会增加。
1.1数据处理流程对比
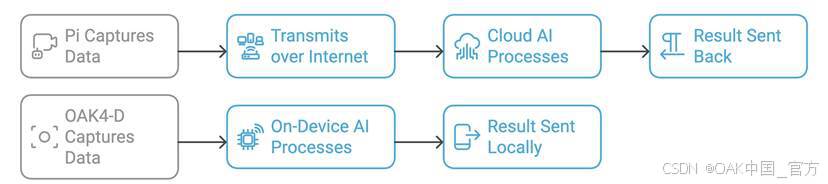
OAK 4 D 的一体化设计绕过了其他两种方法的复杂性和网络依赖性。
对于YOLOv8 模型,基于云的推理可能会引入数十到数百毫秒的网络延迟。Jetson + RealSense 或OAK 4 D 的边缘处理使设备上的推理保持不变,提供近乎即时的实时结果。这些区间范围基于已发布的Raspberry Pi 5 和Jetson YOLOv8 基准测试。
1.2云端推理成本比较: AWS vs Google Cloud Vision
为了使云计算的权衡更加具体,让我们看看假设我们每天 1000 个产品的传送带场景在云推理成本方面意味着什么。大致如下:
· 每天检测1000 次
· ≈ 每月约30000 次API 请求(1000 ×30 天)
我们将比较两种最常用的视觉推理API,用于简单的标签/条形码类型的任务
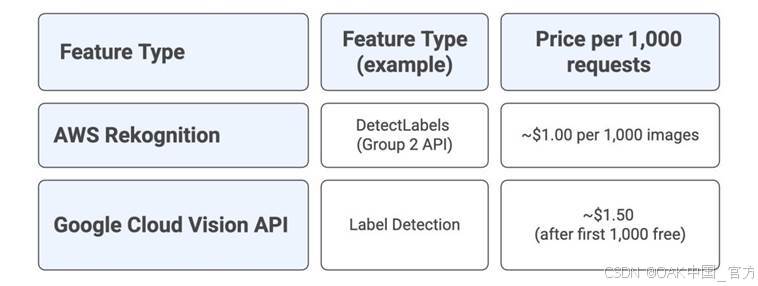
*价格为基础档,以美元计算,可能因地区和功能有席位差异,详情请具体检查当前的定价页面。
对于我们每月 30000 次检测的示例(忽略空闲、存储、网络出口等):
·AWS Recognition
30000张图片×0.001美元≈每月 30 美元的AI推理费用。
· 谷歌云视觉
前1000个标签单位:免费
剩余29000套×1.50/1000美元≈43.50 美元/ 月
因此,即使对于"简单"的质量检查/条形码扫描传送带场景,每天只有 1000 件产品 的云推理,也很快成为每年数百美元的常态化运营费用(OpEx)项目。随着吞吐量的增长(更多的传送带、更多的生产线、更多的站点),这些每1000次的请求费用与您的数量呈线性关系,这与边缘优先的方法(例如OAK 4 D)不同,在这种方法中,您的推理成本实际上受到您部署的硬件的限制。
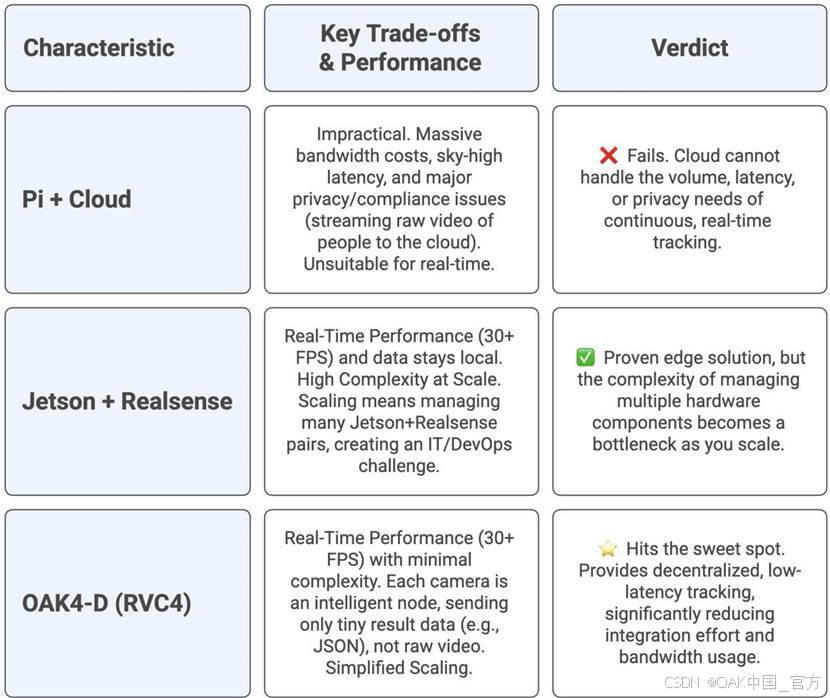
2.门店 / 工厂员工 & 物体追踪 (中等复杂场景)
此任务涉及连续视频流、运行高级检测和跟踪模型,并需要实时警报。
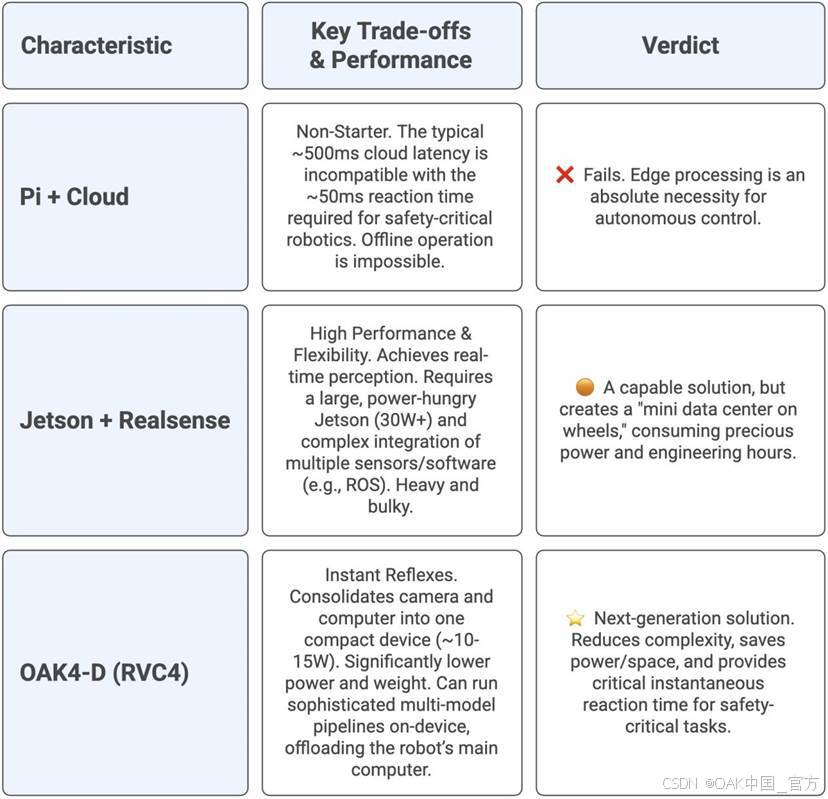
3. 自动驾驶仓储机器人的感知 (高复杂度)
机器人需要实时感知其环境(深度、物体检测、SLAM)以安全导航,并且必须在离线状态下可以即时反应。
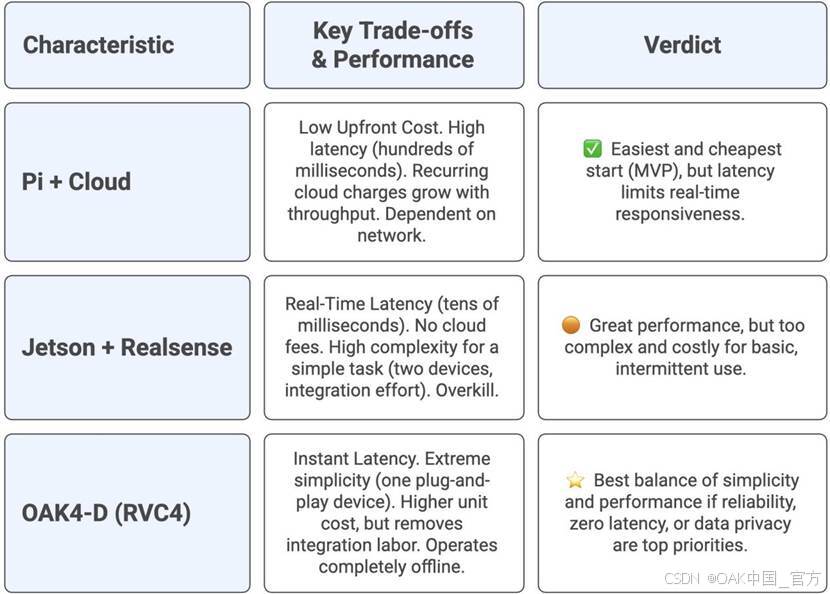
结论: 权衡与取舍
| 微型计算机 + 云 | Jetson + 深度相机 | OAK 4 D(RVC4) | |
|---|---|---|---|
| 前期支出 | 极低 | 适中 --- 高 | 适中 --- 高 |
| 总体拥有成本(TCO) | 低 --- 极高 | 适中 | 最小 |
| 系统复杂度 | 极低 | 高 | 极低 |
| 延迟 | 极高 | 极低 | 极低 |
| 可靠性 | 低 | 高 | 极高 |
| 拓展性 | 极难 | 难 | 简单 |
如果你想要OAK 4 D级别的性能、可靠性和延迟,Jetson + 深度相机的方案实际上不会更便宜,而是会更多。
这样来说,您可以根据您的需求来进行选择:
-
微型计算机(树莓派) + 云: 只有当您需要一次性原型或非关键、低容量任务的最低前期硬件成本时,才推荐考虑考虑微型计算机(树莓派) + 云的技术方案,因为延迟、可靠性和长期运营成本并非您当前考虑的关键因素。
-
Jetson + 深度相机: 只有当你有一个强大、齐全的工程开发团队,并且对最大灵活性有非常具体的需求(例如,融合大量异构传感器,运行非标准GPU工作负载),或者你需要极端的设备上神经网络推理来实现高级机器人 / 推理,这需要一个顶级(且昂贵)的Jetson 模块,并且你准备好处理多设备系统的复杂性、维护和部署开销。
-
OAK 4 D **:**在大部分场景下,它为您提供了简单性、可靠性、超低延迟和大规模的成本效益。由于计算机集成在相机中,它大大减少了集成工作和长期工程成本,抵消了更高的单位价格。
对于需要实时性能和可靠性的工业和机器人应用,将智能推向边缘往往是必须的。OAK 4 D是该领域的尖端产品,使高性能AI视觉系统既强大又"极度简单"!
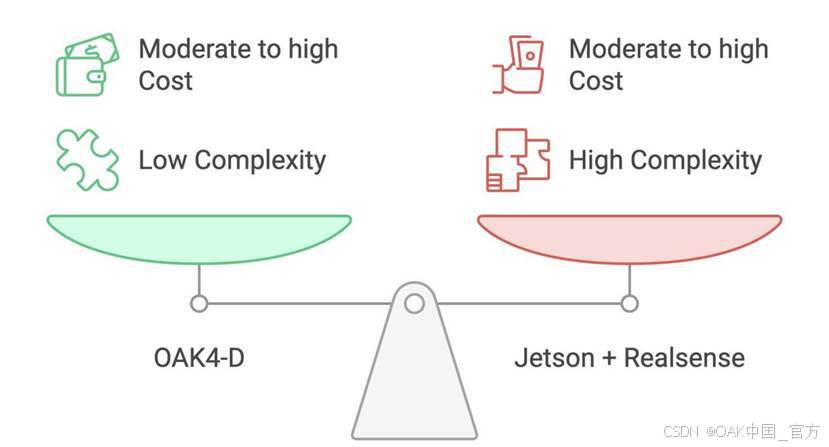
OAK 4 D的一体化设计使系统复杂性与最简单的云端方案一样低,与高度复杂的多组件Jetson配置相比具有巨大的优势。