HyperD: Hybrid Periodicity Decoupling Framework for Traffic Forecasting
现存方法的局限性:
- 周期性建模隐含化:传统趋势 - 季节性分解方法将周期性信息拆分到趋势和季节组件中,破坏了其跨时间尺度和空间位置的统一结构,无法直接建模连贯的周期性模式。
- 分解过程不可学习:传统分解方法为固定规则驱动,效率低且易导致组件错位,难以适配复杂交通场景的动态变化。
- 单尺度周期性建模:部分新兴方法(如 CycleNet)仅能处理单一尺度周期性,未充分利用多尺度周期信息,且缺乏对时空交互关系的有效建模。
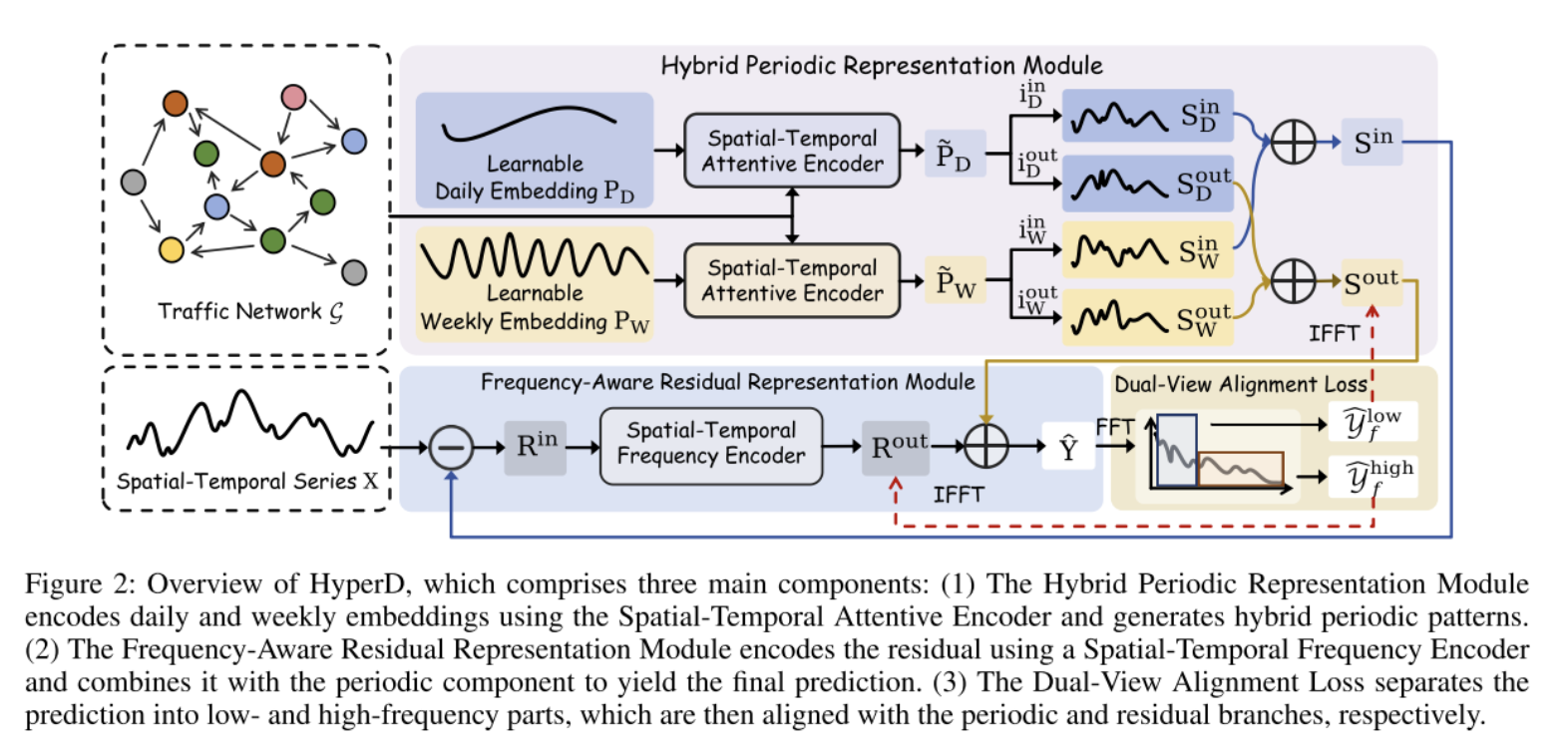
HyperD 框架的创新:
将交通数据显式解耦 为周期性组件(捕捉日、周等稳定周期模式 )和残差组件(捕捉高频非规律波动),通过专用模块分别建模,并引入损失函数保证组件语义分离,最终融合两部分输出得到预测结果。
混合周期性表示模块
时空注意力编码器(STAE): 捕获节点间空间关联和周期内长程时间依赖
时间维度:将每个时间步视为 Query,捕捉周期内部的长程演变规律 。
空间维度:将每个节点视为 Query,捕捉不同位置之间超越物理连接的全局空间模式 。
混合周期模式
元数据准备:对于每一个时间步(Time Step),模型需要知道两个信息:
- Time of Day (ToD):现在是一天中的第几个时间片?(例如:14:30 是第几步)
- Day of Week (DoW):今天是周几?(例如:周一、周二...)
索引计算:
每日索引 (iDi_DiD) :直接等于 ToD。它负责在 P~D\tilde{P}_DP~D(每日嵌入)中定位。比如"早高峰"在每天的索引位置是固定的。
每周索引 (iWi_WiW) :计算公式为 iW=ToD+DoW×LDi_W = \text{ToD} + \text{DoW} \times L_DiW=ToD+DoW×LD。
每周嵌入 P~W\tilde{P}_WP~W 实际上是一个长度为 7×2887 \times 2887×288 的长向量(或矩阵)。这个公式将二维的"周几+时间"展平成了一维索引,从而区分"周一的早高峰"和"周日的早高峰"。
检索与聚合:
针对**SinS^{in}Sin**:
- 使用 iDi_DiD 从每日嵌入 P~D\tilde{P}_DP~D 中切片,得到 SDS_DSD(每日分量)
- 使用 iWi_WiW 从每周嵌入 P~W\tilde{P}_WP~W 中切片,得到 SWS_WSW(每周分量)
- 直接相加
针对SoutS^{out}Sout:
- 确定时间 :对于未来要预测的每一个时间点 ttt(从 T1+1T_1+1T1+1 到 T1+T2T_1+T_2T1+T2)。
- 检索嵌入(Retrieve) :
- 根据未来的时间点(比如"明天上午8:00"),去每日嵌入表 P~D\tilde{P}_DP~D 中查出对应的特征向量 SDoutS^{out}_DSDout 。
- 根据未来的日期(比如"明天是周五"),去每周嵌入表 P~W\tilde{P}_WP~W 中查出对应的特征向量 SWoutS^{out}_WSWout 。
- 聚合(Aggregate) :将两者相加,得到 Sout=SDout+SWoutS^{out} = S^{out}_D + S^{out}_WSout=SDout+SWout 。
频率感知残差表示模块
时空频率编码器(STFE)
将残差转换至频域,通过复数值MLP建模频率特异性时空行为,再转回时域,高效捕捉高频动态。
流程概览: 输入残差 -> 升维 -> 空间 FFT -> 复数 MLP -> 空间 IFFT -> 时间 FFT -> 复数 MLP -> 时间 IFFT -> 输出
双视角对齐损失
为避免周期性组件与残差组件语义重叠,保证解耦有效性:
频率分割 :对最终预测结果 Y^\hat{Y}Y^(它是 SoutS^{out}Sout 和 RoutR^{out}Rout 的和)执行FFT,按阈值 FlowF_{low}Flow 分割为低频部分(Y^flow\hat{Y}_f^{low}Y^flow)(对应周期性模式)和高频部分(Y^fhigh\hat{Y}_f^{high}Y^fhigh) (对应残差模式)。
对齐约束 :通过MSE损失 让低频部分与 SoutS^{out}Sout对齐,高频部分与RoutR^{out}Rout对齐,公式为 Loss=MSE(低频分量,Sout)+MSE(高频分量,Rout)\text{Loss} = \text{MSE}(\text{低频分量}, S^{out}) + \text{MSE}(\text{高频分量}, R^{out})Loss=MSE(低频分量,Sout)+MSE(高频分量,Rout) 。
总损失 :L=Lpred+α∗Ldva\mathcal{L} = \mathcal{L}{pred} + \alpha * \mathcal{L}{dva}L=Lpred+α∗Ldva,其中 α\alphaα 是一个权重系数,用来平衡预测准确度和解耦程度。其中,预测损失 (Lpred\mathcal{L}_{pred}Lpred) :预测值 Y^\hat{Y}Y^ 和真实值 YgtY^{gt}Ygt 之间的差异。