目录
[一、C 语言替代汇编核心优势解析](#一、C 语言替代汇编核心优势解析)
[二、C 语言操作 ARM 外设](#二、C 语言操作 ARM 外设)
[2.1 volatile 关键字](#2.1 volatile 关键字)
[2.2 寄存器地址定义](#2.2 寄存器地址定义)
[2.2.1 宏定义直接映射](#2.2.1 宏定义直接映射)
[2.2.2 结构体封装](#2.2.2 结构体封装)
[2.3 基础 C 语言 LED 驱动代码](#2.3 基础 C 语言 LED 驱动代码)
[三、SDK 移植](#三、SDK 移植)
[3.1 SDK 移植步骤](#3.1 SDK 移植步骤)
[3.2 SDK 版 LED 驱动代码](#3.2 SDK 版 LED 驱动代码)
[四、BSP 工程管理](#四、BSP 工程管理)
[4.1 BSP 工程结构设计](#4.1 BSP 工程结构设计)
[4.2 模块封装:LED 驱动](#4.2 模块封装:LED 驱动)
[4.3 扩展实战:蜂鸣器驱动](#4.3 扩展实战:蜂鸣器驱动)
[4.4 主函数调用](#4.4 主函数调用)
[5.1 链接脚本的作用](#5.1 链接脚本的作用)
[5.2 IMX6ULL 链接脚本](#5.2 IMX6ULL 链接脚本)
[5.3 启动文件修改](#5.3 启动文件修改)
[六、Makefile 优化](#六、Makefile 优化)
[7.1 编译步骤](#7.1 编译步骤)
[7.2 测试步骤](#7.2 测试步骤)
一、C 语言替代汇编核心优势解析
汇编语言直接操作 CPU 指令和寄存器,效率极高,但存在明显短板:
- 代码可读性差:指令密集,难以快速理解逻辑;
- 可维护性低:修改功能需调整寄存器操作指令,容易出错;
- 可移植性弱:不同芯片的汇编指令差异大,无法直接复用。
而 C 语言完美弥补这些不足:
- 高层抽象:用变量、函数、结构体封装底层操作,逻辑清晰;
- 模块化开发:将 LED、蜂鸣器等外设封装为独立模块,可复用;
- 结合 SDK:直接使用芯片厂商提供的头文件和 API,避免硬编码错误;
- 效率接近汇编:优化后的 C 语言代码效率仅比汇编低 5%-10%,完全满足裸机需求。
二、C 语言操作 ARM 外设
2.1 volatile 关键字
在 C 语言操作寄存器时,volatile 是重中之重,作用是告诉编译器 "该变量对应的是硬件寄存器,禁止优化"。
为什么需要 volatile?
编译器会对普通变量进行优化:如果多次读取同一个变量且中间无修改,编译器会直接缓存变量值到寄存器,而非每次都访问内存(寄存器地址)。但寄存器的值可能被硬件实时修改(如外设状态变化),缓存会导致读取到旧值。
用法示例:
cpp
// 错误:无volatile,编译器可能优化为缓存值
#define GPIO1_DR *((unsigned int *)0x0209C000)
// 正确:用volatile修饰,强制每次访问内存(寄存器)
#define GPIO1_DR *((volatile unsigned int *)0x0209C000)2.2 寄存器地址定义
C 语言操作寄存器的核心是 "将内存地址映射为变量",常用两种方式,各有优劣:
2.2.1 宏定义直接映射
直接将寄存器物理地址定义为宏,通过指针访问,适合初期上手:
cpp
// 时钟使能寄存器(CCM)
#define CCM_CCGR0 *((volatile unsigned int *)0x020C4068)
#define CCM_CCGR1 *((volatile unsigned int *)0x020C406C)
// ... 其他CCM寄存器 ...
// GPIO1引脚复用/配置寄存器
#define IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO03 *((volatile unsigned int *)0x020E0068)
#define IOMUXC_SW_PAD_CTL_PAD_GPIO1_IO03 *((volatile unsigned int *)0x020E02F4)
// GPIO1核心寄存器
#define GPIO1_DR *((volatile unsigned int *)0x0209C000) // 数据寄存器
#define GPIO1_GDIR *((volatile unsigned int *)0x0209C004) // 方向寄存器2.2.2 结构体封装
将同一外设的寄存器按地址偏移顺序封装为结构体,模拟外设的寄存器组,可读性和可维护性更强:
cpp
// 定义GPIO外设寄存器结构体(地址偏移对应手册)
typedef struct
{
volatile unsigned int DR; // 数据寄存器,偏移0x00
volatile unsigned int GDIR; // 方向寄存器,偏移0x04
volatile unsigned int PSR; // 状态寄存器,偏移0x08
volatile unsigned int ICR1; // 中断控制寄存器1,偏移0x0C
volatile unsigned int ICR2; // 中断控制寄存器2,偏移0x10
volatile unsigned int IMR; // 中断屏蔽寄存器,偏移0x14
volatile unsigned int ISR; // 中断状态寄存器,偏移0x18
volatile unsigned int EDGE_SEL; // 边缘选择寄存器,偏移0x1C
} GPIO_TypeDef;
// 将GPIO1基地址映射为结构体指针
#define GPIO1 ((GPIO_TypeDef *)0x0209C000)
// 使用示例:设置GPIO1_IO03为输出
GPIO1->GDIR |= (1 << 3); // 等价于 *(volatile unsigned int *)(0x0209C004) |= (1<<3)2.3 基础 C 语言 LED 驱动代码
基于宏定义方式,实现 LED 初始化、点亮、熄灭、闪烁功能,代码结构清晰:
cpp
#include <stdint.h>
// 寄存器地址宏定义
#define CCM_CCGR0 *((volatile uint32_t *)0x020C4068)
#define CCM_CCGR1 *((volatile uint32_t *)0x020C406C)
#define CCM_CCGR2 *((volatile uint32_t *)0x020C4070)
#define CCM_CCGR3 *((volatile uint32_t *)0x020C4074)
#define CCM_CCGR4 *((volatile uint32_t *)0x020C4078)
#define CCM_CCGR5 *((volatile uint32_t *)0x020C407C)
#define CCM_CCGR6 *((volatile uint32_t *)0x020C4080)
#define IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO03 *((volatile uint32_t *)0x020E0068)
#define IOMUXC_SW_PAD_CTL_PAD_GPIO1_IO03 *((volatile uint32_t *)0x020E02F4)
#define GPIO1_DR *((volatile uint32_t *)0x0209C000)
#define GPIO1_GDIR *((volatile uint32_t *)0x0209C004)
// 时钟初始化:使能所有外设时钟
void clock_init(void)
{
CCM_CCGR0 = 0xFFFFFFFF;
CCM_CCGR1 = 0xFFFFFFFF;
CCM_CCGR2 = 0xFFFFFFFF;
CCM_CCGR3 = 0xFFFFFFFF;
CCM_CCGR4 = 0xFFFFFFFF;
CCM_CCGR5 = 0xFFFFFFFF;
CCM_CCGR6 = 0xFFFFFFFF;
}
// LED初始化:复用配置+电气特性+方向设置
void led_init(void)
{
IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO03 = 0x05; // 引脚复用为GPIO功能
IOMUXC_SW_PAD_CTL_PAD_GPIO1_IO03 = 0x10B0; // 电气特性配置(驱动能力、上下拉)
GPIO1_GDIR |= (1 << 3); // GPIO1_IO03设为输出
}
// LED点亮(低电平点亮)
void led_on(void)
{
GPIO1_DR &= ~(1 << 3); // 第3位清0
}
// LED熄灭
void led_off(void)
{
GPIO1_DR |= (1 << 3); // 第3位置1
}
// 延时函数(软件延时)
void led_delay(uint32_t time)
{
while (time--);
}
// 主函数:LED闪烁
int main(void)
{
clock_init(); // 初始化时钟
led_init(); // 初始化LED
while (1) // 死循环闪烁
{
led_on();
led_delay(0x7FFFF);
led_off();
led_delay(0x7FFFF);
}
return 0;
}三、SDK 移植
手动定义寄存器地址容易出错(如地址写错、偏移计算错误),NXP 为 IMX6ULL 提供了 SDK,包含封装好的寄存器结构体、宏定义和工具函数,我们只需复用其头文件,无需从零编写。
3.1 SDK 移植步骤
(1)获取 SDK 头文件:从 NXP 官网或开发板资料中提取 SDK 核心头文件,关键文件包括:
- MCIMX6Y2.h:芯片寄存器基地址和结构体定义(如CCM_Type、GPIO_Type);
- fsl_iomuxc.h:引脚复用配置函数(如IOMUXC_SetPinMux);
- fsl_common.h:通用类型定义(如uint32_t)。
(2)工程结构调整:新建 led_sdk 文件夹,按以下结构组织文件:
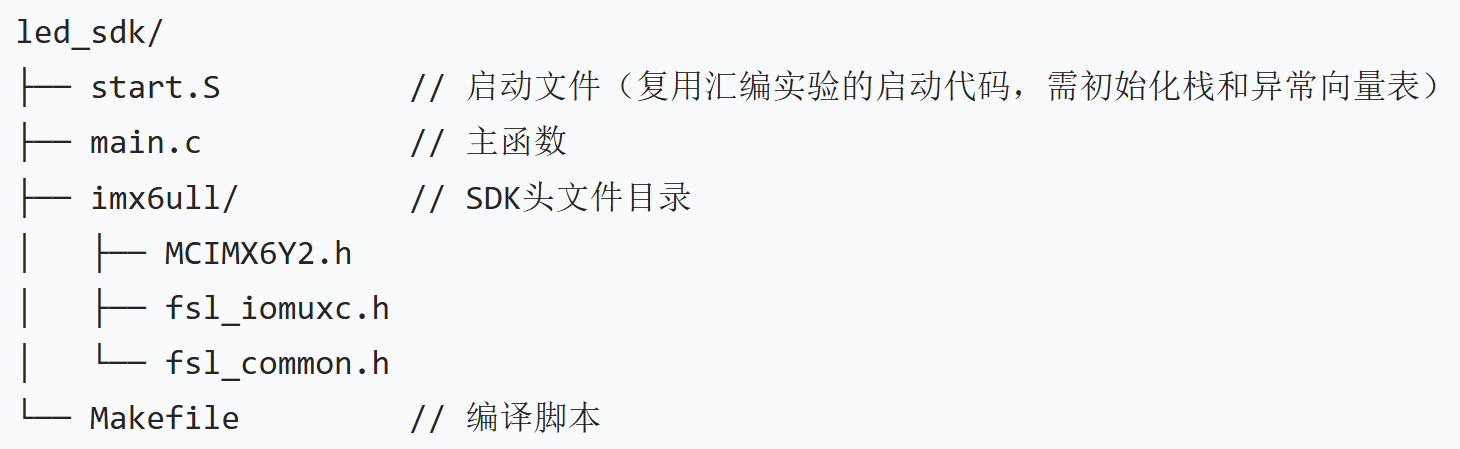
3.2 SDK 版 LED 驱动代码
SDK 头文件已封装好寄存器结构体和配置函数,代码更简洁、不易出错:
cpp
#include "fsl_common.h"
#include "fsl_iomuxc.h"
#include "MCIMX6Y2.h"
// 时钟初始化:使能所有外设时钟
void clock_init(void)
{
CCM->CCGR0 = 0xFFFFFFFF;
CCM->CCGR1 = 0xFFFFFFFF;
CCM->CCGR2 = 0xFFFFFFFF;
CCM->CCGR3 = 0xFFFFFFFF;
CCM->CCGR4 = 0xFFFFFFFF;
CCM->CCGR5 = 0xFFFFFFFF;
CCM->CCGR6 = 0xFFFFFFFF;
}
// LED初始化(使用SDK函数)
void led_init(void)
{
// 1. 引脚复用配置:GPIO1_IO03 -> GPIO功能
IOMUXC_SetPinMux(IOMUXC_GPIO1_IO03_GPIO1_IO03, 0);
// 2. 电气特性配置:0x10B0(驱动能力、上下拉、斜率控制)
IOMUXC_SetPinConfig(IOMUXC_GPIO1_IO03_GPIO1_IO03, 0x10B0);
// 3. GPIO方向设置:输出
GPIO1->GDIR |= (1 << 3);
}
// LED闪烁(翻转电平)
void led_nor(void)
{
GPIO1->DR ^= (1 << 3); // 异或操作,翻转第3位
}
int main(void)
{
clock_init();
led_init();
while (1)
{
led_nor();
led_delay(0x7FFFF);
}
return 0;
}四、BSP 工程管理
随着外设增多(LED、蜂鸣器、串口等),代码会变得混乱,BSP(板级支持包)是解决之道 ------ 将不同外设的驱动封装为独立模块,按功能分层管理,提高代码复用性和可维护性。
4.1 BSP 工程结构设计
推荐按 "芯片层 - 板级层 - 应用层" 分层,结构如下:
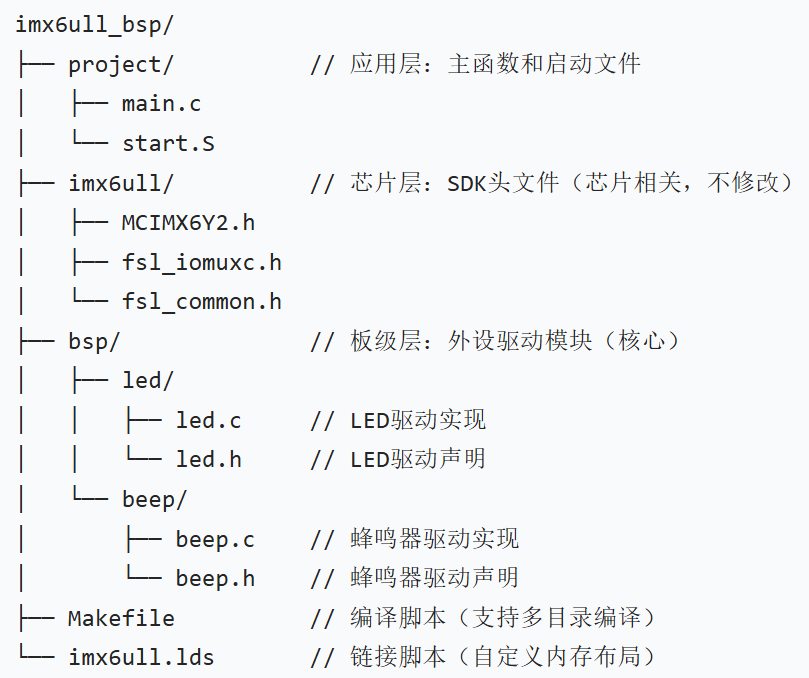
4.2 模块封装:LED 驱动
- led.h(头文件:接口声明)
cpp
#ifndef __LED_H
#define __LED_H
#include "fsl_common.h"
void led_init(void); // 初始化
void led_on(void); // 点亮
void led_off(void); // 熄灭
void led_flicker(void); // 闪烁
void led_delay(uint32_t time); // 延时
#endif- led.c(源文件:实现功能)
cpp
#include "led.h"
#include "MCIMX6Y2.h"
#include "fsl_iomuxc.h"
void led_init(void)
{
IOMUXC_SetPinMux(IOMUXC_GPIO1_IO03_GPIO1_IO03, 0); // 复用功能
IOMUXC_SetPinConfig(IOMUXC_GPIO1_IO03_GPIO1_IO03, 0x10B0); // 电气特性
GPIO1->GDIR |= (1 << 3); // 引脚方向
led_off();
}
void led_on(void)
{
GPIO1->DR &= ~(1 << 3);
}
void led_off(void)
{
GPIO1->DR |= (1 << 3);
}
void led_flicker(void)
{
GPIO1->DR ^= (1 << 3);
}
void led_delay(uint32_t time)
{
while (time--);
}4.3 扩展实战:蜂鸣器驱动
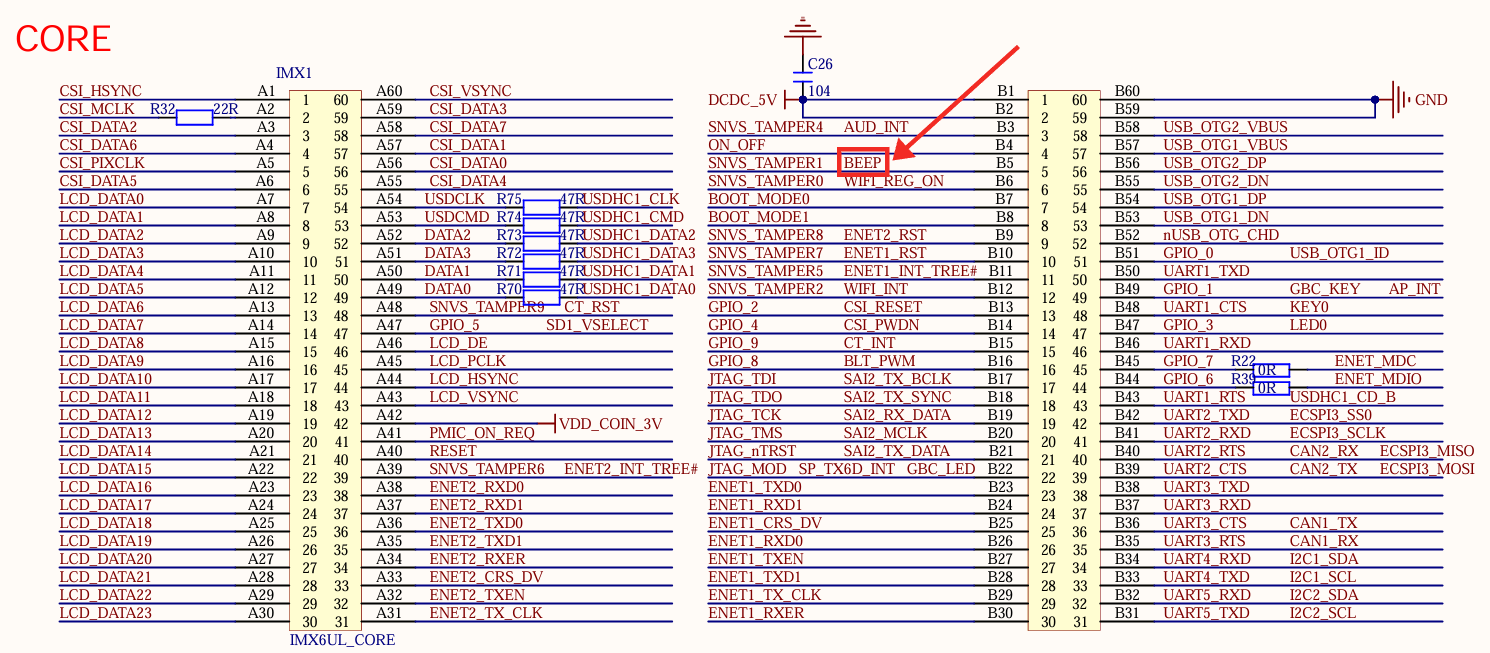
硬件说明:
开发板采用 S8550 PNP 型三极管 控制蜂鸣器:
- 三极管基极通过 GPIO5_IO1 引脚控制,高电平时三极管截止(蜂鸣器不发声),低电平时三极管导通(蜂鸣器发声);
- 引脚复用关系:SNVS_TAMPER1 → GPIO5_IO1(对应 SDK 宏定义IOMUXC_SNVS_SNVS_TAMPER1_GPIO5_IO01)。
- beep.h(头文件:接口声明)
cpp
#ifndef __BEEP_H
#define __BEEP_H
#include "fsl_common.h"
void beep_init(void); // 初始化
void beep_on(void); // 发声
void beep_off(void); // 停止
void beep_nor(void); // 状态翻转
#endi- beep.c(源文件:实现功能)
cpp
#include "beep.h"
#include "MCIMX6Y2.h"
#include "fsl_iomuxc.h"
void beep_init(void)
{
IOMUXC_SetPinMux(IOMUXC_SNVS_SNVS_TAMPER1_GPIO5_IO01, 0); // 复用功能
IOMUXC_SetPinConfig(IOMUXC_SNVS_SNVS_TAMPER1_GPIO5_IO01, 0x10B0); // 电气特性
GPIO5->GDIR |= ((1 << 1)); // 引脚方向
beep_off();
}
void beep_on(void)
{
GPIO5->DR &= ~((1 << 1));
}
void beep_off(void)
{
GPIO5->DR |= ((1 << 1));
}
void beep_nor(void)
{
GPIO5->DR ^= ((1 << 1));
}4.4 主函数调用
cpp
#include "MCIMX6Y2.h"
#include "beep.h"
#include "led.h"
void clock_cg_init(void)
{
CCM->CCGR0 = 0xFFFFFFFF;
CCM->CCGR1 = 0xFFFFFFFF;
CCM->CCGR2 = 0xFFFFFFFF;
CCM->CCGR3 = 0xFFFFFFFF;
CCM->CCGR4 = 0xFFFFFFFF;
CCM->CCGR5 = 0xFFFFFFFF;
CCM->CCGR6 = 0xFFFFFFFF;
}
void g_delay(unsigned int t)
{
while (t--);
}
int main(int argc, char **argv)
{
clock_cg_init();
beep_init();
led_init();
while (1)
{
beep_nor();
led_nor();
g_delay(0x7FFFF);
}
return 0;
}五、链接脚本
之前的编译用 -Ttext 指定代码段起始地址,功能简单。实际开发中需用链接脚本(.lds) 精确控制各段(代码段、数据段、BSS 段)的内存分布,还需初始化 BSS 段(全局变量 / 静态变量清 0)。
5.1 链接脚本的作用
- 定义程序在内存中的存储地址(如代码段起始地址 0x87800000);
- 划分各段(.text、.rodata、.data、.bss)的存储区域;
- 标记 BSS 段的起始和结束地址,方便启动代码初始化。
5.2 IMX6ULL 链接脚本
cpp
SECTIONS
{
. = 0x87800000; // 程序起始地址(SD卡启动地址)
// 代码段:存放指令,只读
.text :
{
obj/start.o // 启动文件优先链接(必须在最前面)
*(.text) // 其他所有代码段
}
// 只读数据段:存放字符串常量、const变量,4字节对齐
.rodata ALIGN(4) : {*(.rodata*)}
// 初始化数据段:存放已初始化的全局变量/静态变量,4字节对齐
.data ALIGN(4) : {*(.data)}
// BSS段:存放未初始化的全局变量/静态变量,需清0
__bss_start =. ; // BSS段起始地址
.bss ALIGN(4) : {*(.bss) *(.COMMON)} // 通用未初始化数据
__bss_end =. ; // BSS段结束地址
}5.3 启动文件修改
C 语言中未初始化的全局变量和静态变量默认值为 0,需在启动文件中添加 BSS 段清 0 代码(在进入 main 函数前执行):
.global _start
_start:
// 1. 初始化栈(复用之前的配置)
ldr sp, =0x82000000
// 2. 初始化BSS段(清0)
ldr r0, =__bss_start // BSS段起始地址(链接脚本定义)
ldr r1, =__bss_end // BSS段结束地址
bss_clear:
cmp r0, r1 // 判断是否清0完成
bge main // 完成则跳转到main函数
mov r2, #0
str r2, [r0], #4 // 清0当前地址,r0自增4
b bss_clear
// 3. 跳转到C语言main函数
main:
bl main
loop:
b loop六、Makefile 优化
BSP 工程包含多个目录和文件,手动编译繁琐,需优化 Makefile 支持自动查找文件、多目录编译:
bash
# 工具链配置
COMPILER = arm-linux-gnueabihf-
CC = $(COMPILER)gcc
LD = $(COMPILER)ld
OBJCOPY = $(COMPILER)objcopy
OBJDUMP = $(COMPILER)objdump
AR = $(COMPILER)ar
# 工程路径配置
TOP_DIR = $(shell pwd)
PROJECT_DIR = $(TOP_DIR)/project
BSP_DIR = $(TOP_DIR)/bsp
IMX6ULL_DIR = $(TOP_DIR)/imx6ull
OBJ_DIR = $(TOP_DIR)/obj # 目标文件存放目录
# 头文件路径(-I指定,支持嵌套包含)
INCLUDES = -I$(IMX6ULL_DIR) \
-I$(BSP_DIR)/led \
-I$(BSP_DIR)/beep
# 编译选项:ARM架构、调试信息、优化等级
CFLAGS = -march=armv7-a -mtune=cortex-a7 -mfloat-abi=hard -mfpu=neon-vfpv4 \
-O2 -g -Wall $(INCLUDES)
# 链接脚本
LDSCRIPT = $(TOP_DIR)/imx6ull.lds
# 查找所有源文件(.S和.c)
SRCS = $(wildcard $(PROJECT_DIR)/*.S) \
$(wildcard $(PROJECT_DIR)/*.c) \
$(wildcard $(BSP_DIR)/*/*.c)
# 生成目标文件路径(将源文件路径替换为OBJ_DIR)
OBJS = $(patsubst %.S, $(OBJ_DIR)/%.o, $(notdir $(filter %.S, $(SRCS)))) \
$(patsubst %.c, $(OBJ_DIR)/%.o, $(notdir $(filter %.c, $(SRCS))))
# 目标文件:最终二进制文件
TARGET = imx6ull_led_beep
# 创建OBJ_DIR目录(若不存在)
$(shell mkdir -p $(OBJ_DIR))
# 链接:生成ELF文件
$(OBJ_DIR)/$(TARGET).elf : $(OBJS)
$(LD) -T $(LDSCRIPT) $^ -o $@
# 格式转换:ELF->bin
$(TARGET).bin : $(OBJ_DIR)/$(TARGET).elf
$(OBJCOPY) -O binary -S -g $^ $@
$(OBJDUMP) -D $^ > $(TARGET).dis
# 汇编文件编译(.S->.o)
$(OBJ_DIR)/%.o : $(PROJECT_DIR)/%.S
$(CC) -c $(CFLAGS) $^ -o $@
# C文件编译(.c->.o)
$(OBJ_DIR)/%.o : $(PROJECT_DIR)/%.c
$(CC) -c $(CFLAGS) $^ -o $@
$(OBJ_DIR)/%.o : $(BSP_DIR)/%/%.c
$(CC) -c $(CFLAGS) $^ -o $@
# 伪目标:编译所有
all: $(TARGET).bin
# 伪目标:烧写程序到SD卡
load:
./imxdownload $(TARGET).bin /dev/sdb
# 伪目标:清理编译产物
clean:
rm -rf $(OBJ_DIR) $(TARGET).bin $(TARGET).dis
rm -f start.o start.elf # 兼容旧文件
# 声明伪目标
.PHONY: all load clean七、编译烧写与测试
7.1 编译步骤
- 按 BSP 工程结构组织文件,将 imxdownload 烧写工具拷贝到工程根目录;
- 赋予烧写工具执行权限:chmod +777 imxdownload;
- 执行编译:make all(生成imx6ull_led_beep.bin);
- 烧写程序:make load(需插入 SD 卡,确认设备名为/dev/sdb)。
7.2 测试步骤
- 开发板拨码开关选择 SD 卡启动;
- 插入烧写好的 SD 卡,上电;
- 观察现象:红色 LED 周期性闪烁,蜂鸣器同步间歇发声。
八、核心问题解答
1. led点灯过程,需要配置那些寄存器?
- 时钟使能寄存器(CCM_CCGRx):使能 GPIO 外设时钟;
- 引脚复用寄存器(IOMUXC_SW_MUX_CTL_PAD_xxx):将引脚设为 GPIO 功能;
- 引脚电气特性寄存器(IOMUXC_SW_PAD_CTL_PAD_xxx):配置驱动能力、上下拉等;
- GPIO 方向寄存器(GPIOx_GDIR):设置引脚为输出模式;
- GPIO 数据寄存器(GPIOx_DR):控制引脚高低电平(点亮 / 熄灭)。
2. elf文件格式,各段存放什么样的数据
- .text:可执行指令(代码),只读;
- .rodata:只读数据(const 常量、字符串);
- .data:已初始化的全局 / 静态变量;
- .bss:未初始化的全局 / 静态变量(仅占地址,无实际存储)。
3. 链接脚本的作用是什么?
- 定义程序各段在内存中的存储地址;
- 控制段的排列顺序(如启动文件优先链接);
- 标记特殊地址(如 BSS 段起止),便于初始化;
- 适配硬件内存布局(划分 ROM/RAM 区域)。