在当今的机器人研究领域,通过人类演示进行模仿学习(Imitation Learning)已成为训练自主机器人策略的主流方法。然而,构建高质量的演示数据集面临着巨大的成本挑战:它不仅需要昂贵的硬件设备,还需要操作员进行长时间、枯燥的重复劳动,这极大地限制了训练数据的规模。
为了打破这一瓶颈,斯坦福大学等机构的研究人员开发了RoboCade平台。该平台以Franka Research 3 (FR3) 机械臂为核心硬件,通过"游戏化"手段将远程遥操作(Teleoperation)转化为极具吸引力的互动体验,成功吸引了普通用户参与到机器人数据采集的过程中。
游戏化机器人数据采集:以Franka Research 3为
硬件基石:Franka Research 3与Gello控制器的协同
RoboCade 系统的架构设计优先考虑了易用性和低延迟。在硬件层面,研究团队选用了 Franka Research 3 (FR3) 机械臂。FR3 以其高精度和对科研友好的接口著称,能够胜任各种精细的操控任务。

图1:左侧为操作员使用的GELLO远程控制器(基于3D打印的关节空间控制器),右侧为执行任务的Franka Research 3 (FR3) 机械臂。系统通过多视角摄像头(ZED系列)捕捉画面,并实时回传至用户的 Web 界面。
为了实现低成本且直观的控制,RoboCade采用了GELLO控制器。它允许用户通过关节空间阻抗控制来操作FR3,这种方式自然地遵循运动学约束,相比传统的 VR 控制器,能更有效地避免机械臂自碰撞,且对新手用户极其友好。
游戏化系统设计:从"操作员"到"玩家"
RoboCade的核心创新在于将单调的数据采集转变为引人入胜的游戏体验。其Web 界面设计遵循了四个核心gamification原则(SD1-SD4):实时反馈、挑战目标、身份晋升和社交参与。

图2:系统与任务设计概述。RoboCade使用GELLO控制器16和基于网络的界面,以实现对真实设备的远程遥操作机器人。
通过这些设计,FR3的操作者不再仅仅是数据的"搬运工",而是为了获得更高积分、解锁更高级勋章而不断磨炼技能的"玩家"。这种心理暗示极大地延长了用户的单次采集时长。
任务重构:目标任务与支持任务的映射
为了确保"游戏"数据能用于训练严肃的机器人策略,RoboCade提出了一套将下游目标任务(Target Task)转化为游戏化支持任务(Support Task)的原则。虽然形式变有趣了,但其底层的物理运动逻辑------如抓取、旋转、插入------与实际科研需求高度一致。
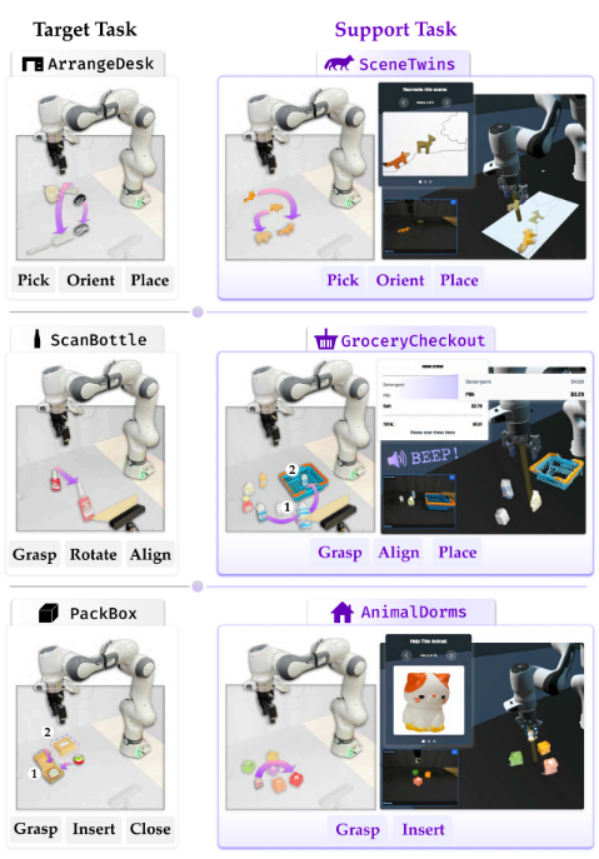
图3 说明:展示了三种典型任务的转化。
-
空间排列(Spatial Arrangement):实际任务是整理桌面,游戏化后变为"场景拼图"。
-
扫描(Scanning):实际任务是扫描工业瓶,游戏化后变为"超市收银"。
-
插入(Insertion):实际任务是纸箱打包,游戏化后变为"动物宿舍"。
这种映射确保了FR3在"玩游戏"过程中产生的轨迹数据,可以无缝用于训练机器人处理现实生活中的复杂物体,实现了"玩中学"的最高境界。
实验验证:游戏化数据对FR3性能的提升
研究团队通过严谨的消融实验,验证了RoboCade 产生的数据对 FR3 策略学习的实际价值。
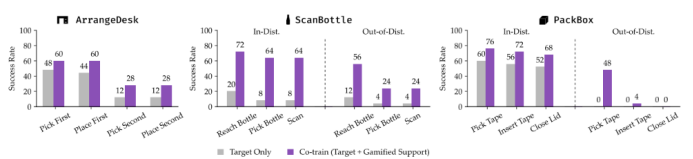
在****FR3机械臂上的实验结果显示:
-
**性能飞跃:**在"扫描任务"中,协同训练后的机器人成功率提升了超过 50%。
-
**泛化能力:**在面对未见过的物体分布(OOD)时,利用游戏化数据训练的模型表现出更强的鲁棒性。
-
**大模型适配:**即使是针对OpenVLA 等先进的预训练模型,加入 FR3 的游戏化数据进行微调,也能显著优化其动作的连贯性。
结语:
RoboCade平台的成功,证明了利用Franka Research 3这种高精度硬件结合巧妙的游戏设计,可以打破机器人数据采集的"成本围墙"。
当数以千计的普通用户可以通过网页,在操作FR3完成"超市收银"或"积木拼图"的过程中贡献高质量数据时,机器人迈向通用人工智能(AGI)的速度将大大加快。