博主注: 本文基于 SimpleITK 官方教程
63_Registration_Initialization.ipynb代码实战整理。重点解析了当自动配准失效时,如何通过几何中心、穷举搜索以及手动标记点来正确初始化配准。
前言:为什么"第一步"至关重要?
在医学图像配准中,初始化(Initialization)直接决定了算法的成败。因为大多数配准算法(如梯度下降)都是迭代优化的,它们非常依赖于"起始位置"。
-
如果起点离终点太远:算法可能会陷入局部极值(Local Minima),导致配准完全错误。
-
如果起点足够好:算法能迅速收敛,计算快且准。
本文将按照 自动化程度从高到低 的顺序,介绍三种核心初始化策略。
一、 策略一:几何中心对齐 (Centered Transform)
这是最基础的策略。当两张图像的解剖结构方向基本一致(比如都是头朝上),只是空间位置有偏差时,我们可以假设:将两张图像的中心重合,就是最好的起点。
SimpleITK 提供了 CenteredTransformInitializer 来实现这一步,它不需要任何手动干预。
Python
initial_transform = sitk.CenteredTransformInitializer(
fixed_image,
moving_image,
sitk.Euler3DTransform(),
sitk.CenteredTransformInitializerFilter.GEOMETRY,
)-
GEOMETRY: 简单的几何中心对齐(物理坐标系的中心)。
-
MOMENTS: 基于图像灰度重心(Center of Mass)对齐。
二、 策略二:参数空间采样与穷举 (Sampling Parameter Space)
当图像存在较大的旋转差异(例如病人躺反了 180 度),简单的中心对齐就会失效。此时,我们需要在参数空间内进行搜索。
1. 穷举优化器 (Exhaustive Optimizer)
这是一个"笨拙但有效"的方法。它会在参数空间内画一个网格,挨个测试每个位置的相似度分数。
关键参数设置:
Python
# 设定网格搜索步数:[角度X, 角度Y, 角度Z, 位移X, 位移Y, 位移Z]
# 这里表示只在 Y 和 Z 轴旋转方向上各搜索一步(0, -step, +step)
registration_method.SetOptimizerAsExhaustive(
numberOfSteps=[0, 1, 1, 0, 0, 0],
stepLength=np.pi
)2. 进阶:探索与利用 (Exploration & Exploitation)
穷举优化器的默认行为是只返回"第一名"。但在复杂场景下,我们可能想知道前几名(Top-K)的情况,或者探索不连续的区域。
这时,我们可以利用 观察者模式 (Observer Pattern) 记录穷举过程中的每一步。
代码实现逻辑:
-
定义"记账员" (Observer):
创建一个回调函数,每当优化器计算一步,就把当前的 (分数, 参数) 记录到全局列表中。
Pythondef iteration_observer(registration_method): metricvalue_parameters_list.append( (registration_method.GetMetricValue(), registration_method.GetOptimizerPosition()) ) -
绑定事件:
利用
AddCommand将观察者绑定到sitkIterationEvent。
Pythonregistration_method.AddCommand( sitk.sitkIterationEvent, lambda: iteration_observer(registration_method) ) -
筛选 (Exploitation):
机器跑完后,我们对
metricvalue_parameters_list进行排序,取出分数最低(最好)的前 K 个参数,分别作为起点进行精细配准。
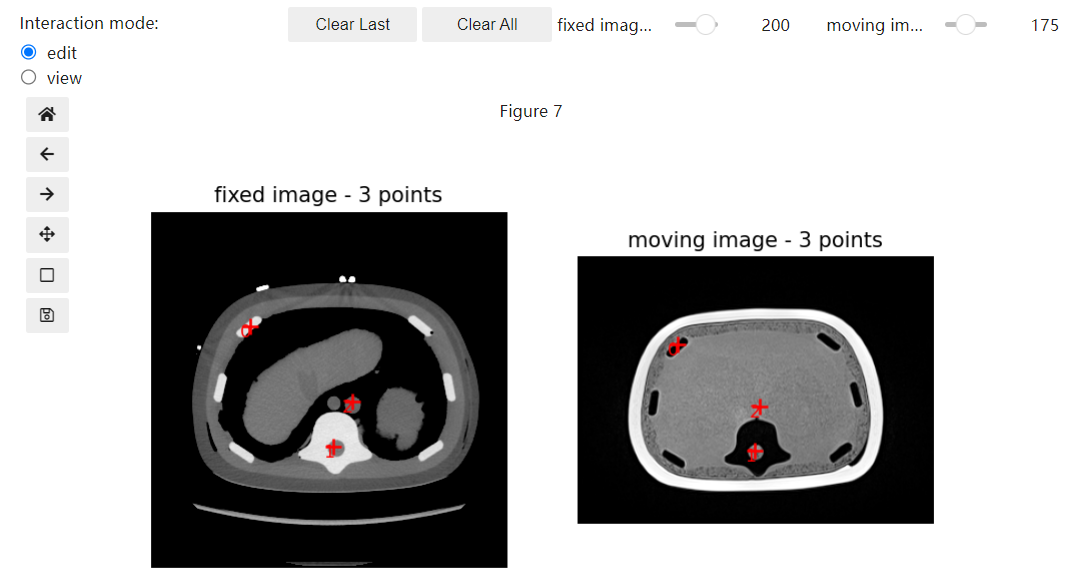
三、 策略三:手动初始化 (Manual Initialization)
当所有自动算法(包括穷举)都无法找到正确的方向时,我们必须引入人工干预(Human in the loop)。这是最后的手段,但几乎总是有效的。
1. 核心思想
我们在固定图像和移动图像上分别手动点击几对解剖对应点 (Landmarks),然后让计算机算出一个能让这些点尽可能重合的初始变换。
2. 代码深度解析
这一部分涉及到底层数据处理和变换类型的转换,细节很多。
第一步:数据扁平化 (Flattening)
从 GUI 或列表中获取的点通常是元组列表 [(x1,y1,z1), (x2,y2,z2)]。但底层 C++ 算法需要一维数组。
Python
# 使用双重列表推导式将数据拉平
# 效果:[(1,2,3), (4,5,6)] -> [1, 2, 3, 4, 5, 6]
fixed_image_points_flat = [c for p in fixed_image_points for c in p]
moving_image_points_flat = [c for p in moving_image_points for c in p]第二步:计算刚体变换 (SVD算法)
使用 LandmarkBasedTransformInitializer,它通过奇异值分解(SVD)直接算出最优的旋转和平移。注意这里通常先使用 VersorRigid3DTransform(四元数),因为它在数学上更严谨。
Python
init_transform = sitk.VersorRigid3DTransform(
sitk.LandmarkBasedTransformInitializer(
sitk.VersorRigid3DTransform(),
fixed_image_points_flat,
moving_image_points_flat
)
)第三步:类型转换 (Versor -> Euler)
这是一个容易被忽视的高级技巧。
-
为什么要转? Versor(四元数)要求参数模长为1,在后续的优化过程中容易因数值误差导致不稳定。Euler(欧拉角)没有约束,对优化器更友好。
-
怎么转? 必须显式拷贝 中心 (Center)、矩阵和位移。
Python
initial_transform = sitk.Euler3DTransform()
# 关键点:必须同步旋转中心!否则图像会绕原点旋转而飞出视野
initial_transform.SetCenter(init_transform.GetCenter())
initial_transform.SetMatrix(init_transform.GetMatrix())
initial_transform.SetTranslation(init_transform.GetTranslation())总结
在 SimpleITK 63_Registration_Initialization 教程中,我们学到了:
-
先尝试自动对齐 :使用
CenteredTransformInitializer。 -
大角度旋转用穷举 :配合
ExhaustiveOptimizer和观察者模式来寻找全局最优的初始点。 -
最后手段用手动 :通过
LandmarkBasedTransformInitializer利用人工标记点,注意数据扁平化和变换类型的转换细节。
掌握了这些初始化技巧,才能让后续的 ImageRegistrationMethod 跑得稳、准、快。