BMP280 是一款由博世(Bosch)推出的高精度气压和温度传感器模块,常用于气象监测、高度计、无人机等应用。
-
工作电压 :模块通常支持 3.3V--5.5V 供电(部分资料指出芯片本身为 1.71V--3.6V,但模块已集成电平转换电路,可兼容 5V)。
-
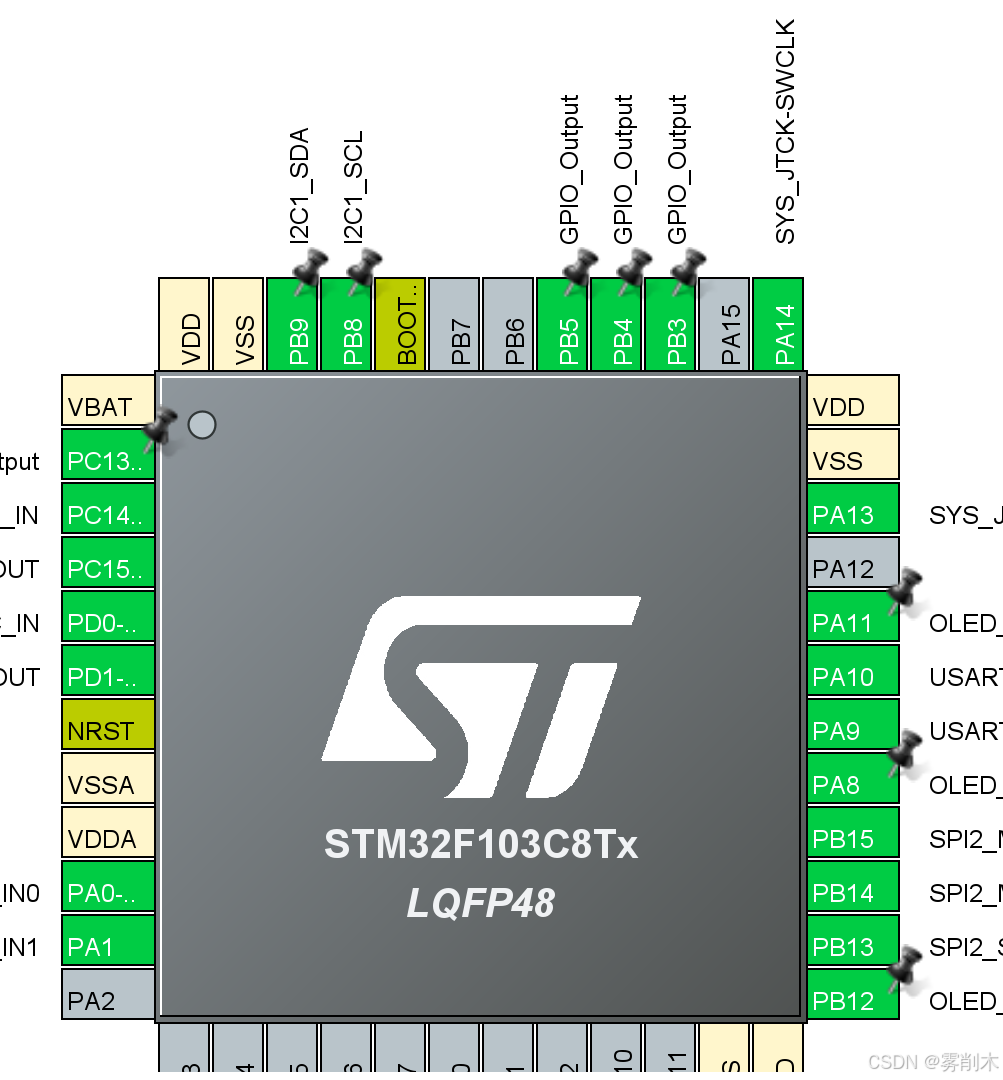
通信接口 :支持 I²C(默认地址 0x76) 和 SPI,其中 I²C 接口在多数模块中为 5V 兼容 。
-
气压测量范围 :300 hPa 至 1100 hPa(相当于海拔约 -500 米至 +9000 米)。
-
气压精度:
-
绝对精度:±1 hPa(对应高度误差约 ±8.33 米);
-
相对精度:±0.12 hPa(可用于检测约 ±1 米的高度变化)。
-
-
温度测量范围 :-40°C 至 +85°C ,精度为 ±0.5°C 。
-
工作电流 :典型值约为 0.6 mA(650 µA),具体取决于采样率和工作模式 。
-
封装与尺寸:采用紧凑型 8 引脚贴片封装,适合空间受限的应用 。
BMP280.h
#ifndef BMP280_H
#define BMP280_H
#include "i2c.h"
#include <stdint.h>
#define BMP280_I2C &hi2c1
HAL_StatusTypeDef BMP280_Init();
HAL_StatusTypeDef BMP280_Read(int32_t* temp, int32_t* press);
#endif //BMP280_HBMP280.c
#include "bmp280.h"
#include <stdio.h>
#include "i2c.h"
/**
* I2C通信地址
* SDO接地时:I2C地址是:0b1110110,即0x76
* SDO接VDD时:I2C地址是:0b1110111,即0x77
* 以接地时为例,完整的地址位为8位:
* 当主机向从机发送数据的目的是设置(写)从机,最后一位补充0,即0b11101100
* 当主机向从机发送数据的目的是从从机读取数据,最后一位补充1,即0b11101101
*/
#define BMP280_I2C_ADDRESS 0x76
//id寄存器地址
#define ID_ADDRESS 0xD0
//配置寄存器地址
#define CONFIG_ADDRESS 0xF5
//控制寄存器地址
#define CTRL_ADDRESS 0xF4
//重置寄存器地址
#define RESET_ADDRESS 0xE0
//校准寄存器的起始地址(part_1)
#define CALIBRATION_ADDRESS 0x88
//存储原始读取到温湿度信息的寄存器首地址
#define DATA_ADDRESS 0xF7
//计算补偿使用的变量
static int32_t t_fine;
// 温度和压力补偿值,从补偿寄存器中读取,启动时读取即可
static uint16_t dig_T1;
static int16_t dig_T2;
static int16_t dig_T3;
static uint16_t dig_P1;
static int16_t dig_P2;
static int16_t dig_P3;
static int16_t dig_P4;
static int16_t dig_P5;
static int16_t dig_P6;
static int16_t dig_P7;
static int16_t dig_P8;
static int16_t dig_P9;
//校准温度方法(文档内置)
static int32_t calibration_T(int32_t adc_T);
//校准气压方法(文档内置)
static uint32_t calibration_P(int32_t adc_P);
//获取校准(补偿)值
static HAL_StatusTypeDef readCalibrationData();
//工具方法写入指令
static HAL_StatusTypeDef write_bmp280(uint8_t address, uint8_t cmd);
HAL_StatusTypeDef BMP280_Init()
{
//先delay一下,确保设备上电了
HAL_Delay(100);
//首先检验设备是否正确;
uint8_t chip_id = 0;
const HAL_StatusTypeDef r0 = HAL_I2C_Mem_Read(BMP280_I2C, BMP280_I2C_ADDRESS << 1 | 1, ID_ADDRESS,
I2C_MEMADD_SIZE_8BIT, &chip_id, 1,HAL_MAX_DELAY);
if (r0 != HAL_OK)
{
// 通信失败,返回错误
return r0;
}
if (chip_id != 0x58)
{
//设备id错误
return HAL_ERROR;
}
//重置设备设定
const uint8_t reset_cmd = 0xB6;
const HAL_StatusTypeDef r1 = write_bmp280(RESET_ADDRESS, reset_cmd);
if (r1 != HAL_OK)
{
return r1;
}
// 软复位后需等待 2ms 设备完成初始化,这里等10ms
HAL_Delay(10);
// 配置寄存器(0xF5)用于设置设备的速率、滤波器和接口选项, Bits [7:5]:t_sb(休眠时间,BMP只能是110/111)Bits [4:2]:filter(滤波器系数)Bits [0]:spi(兼容SPI模式)
//休眠200ms,不过滤
const uint8_t config_cmd = 0xC0;
const HAL_StatusTypeDef r2 = write_bmp280(CONFIG_ADDRESS, config_cmd);
if (r2 != HAL_OK)
{
return r2;
}
//设置ctrl_means寄存器,即控制方法寄存器(0xF4), Bits [7:5]:osrs_t(温度过采样)Bits [4:2]:osrs_p(气压过采样)Bits [1:0]:mode(工作模式)
//1倍压力,1倍温度过采样,正常模式;(由于未开启过滤器,此时压力和温度传感器的分辨率是18位)
const uint8_t ctrl_means_cmd = 0x27;
const HAL_StatusTypeDef r3 = write_bmp280(CTRL_ADDRESS, ctrl_means_cmd);
if (r3 != HAL_OK)
{
return r3;
}
//ctrl_hum 无需设置,因为bmp280不能测定湿度;
//读取校准值,用于校准读取数据0x88~0xA1
const HAL_StatusTypeDef r4 = readCalibrationData();
if (r4 != HAL_OK)
{
return r4;
}
return HAL_OK;
}
/**
* 向传感器发送请求,读取温度/气压信息
* @param temp 温度,除以100为摄氏度
* @param press 气压,除以100为Pa
*/
HAL_StatusTypeDef BMP280_Read(int32_t* temp, int32_t* press)
{
uint8_t data[8] = {0};
const HAL_StatusTypeDef ret = HAL_I2C_Mem_Read(BMP280_I2C, BMP280_I2C_ADDRESS << 1 | 1, DATA_ADDRESS,
I2C_MEMADD_SIZE_8BIT, data, 8, 1000);
if (ret != HAL_OK)
{
return ret;
}
// rx_buffer,读取buffer值看看把,返回数据0-7,共8字节,即0xF7~0xFE;0-2压力,3-5温度,6-7湿度(bmp不存在)
uint32_t pres_raw = (data[0] << 12) | (data[1] << 4) | (data[2] >> 4);
uint32_t temp_raw = (data[3] << 12) | (data[4] << 4) | (data[5] >> 4);
//校准数据(注意实际要除以100使用)
*temp = calibration_T(temp_raw);
*press = calibration_P(pres_raw);
return HAL_OK;
}
/**
* 向bmp280写入某个寄存器单字节命令,进行配置或指示行为
* @param address 寄存器地址
* @param cmd 单字节数据
*/
HAL_StatusTypeDef write_bmp280(const uint8_t address, uint8_t cmd)
{
const HAL_StatusTypeDef ret = HAL_I2C_Mem_Write(BMP280_I2C, BMP280_I2C_ADDRESS << 1, address,
I2C_MEMADD_SIZE_8BIT, &cmd, 1, 1000);
if (ret != HAL_OK)
{
return ret;
}
return HAL_OK;
}
HAL_StatusTypeDef readCalibrationData()
{
//补偿(校准)值一共有33个字节存储,需要读取,对于温度和湿度实际读取到0x88~0x9F即可,即24个寄存器
//第一部分:0x88~0xA1一共26个8位寄存器
//第二部分:0xE1~0xE7 一共7个8位寄存器,都是和湿度有关的,不读了
uint8_t data[24] = {0};
const HAL_StatusTypeDef ret = HAL_I2C_Mem_Read(BMP280_I2C, BMP280_I2C_ADDRESS << 1 | 1, CALIBRATION_ADDRESS,
I2C_MEMADD_SIZE_8BIT, data, 24, 1000);
if (ret != HAL_OK)
{
return HAL_ERROR;
}
dig_T1 = (data[1] << 8) | data[0];
dig_T2 = (data[3] << 8) | data[2];
dig_T3 = (data[5] << 8) | data[4];
dig_P1 = (data[7] << 8) | data[6];
dig_P2 = (data[9] << 8) | data[8];
dig_P3 = (data[11] << 8) | data[10];
dig_P4 = (data[13] << 8) | data[12];
dig_P5 = (data[15] << 8) | data[14];
dig_P6 = (data[17] << 8) | data[16];
dig_P7 = (data[19] << 8) | data[18];
dig_P8 = (data[21] << 8) | data[20];
dig_P9 = (data[23] << 8) | data[22];
return HAL_OK;
}
int32_t calibration_T(int32_t adc_T)
{
int32_t var1, var2, T;
var1 = ((((adc_T >> 3) - ((int32_t)dig_T1 << 1))) * ((int32_t)dig_T2)) >> 11;
var2 = (((((adc_T >> 4) - ((int32_t)dig_T1)) * ((adc_T >> 4) - ((int32_t)dig_T1))) >> 12) * ((signed
long int)dig_T3)) >> 14;
t_fine = var1 + var2;
T = (t_fine * 5 + 128) >> 8;
return T;
}
uint32_t calibration_P(int32_t adc_P)
{
int32_t var1, var2;
uint32_t P;
var1 = (t_fine >> 1) - (int32_t)64000;
var2 = (((var1 >> 2) * (var1 >> 2)) >> 11) * ((int32_t)dig_P6);
var2 = var2 + ((var1 * ((int32_t)dig_P5)) << 1);
var2 = (var2 >> 2) + (((int32_t)dig_P4) << 16);
var1 = (((dig_P3 * (((var1 >> 2) * (var1 >> 2)) >> 13)) >> 3) + ((((int32_t)dig_P2) * var1) >> 1)) >> 18;
var1 = ((((32768 + var1)) * ((int32_t)dig_P1)) >> 15);
if (var1 == 0)
{
return 0;
}
P = (((uint32_t)(((int32_t)1048576) - adc_P) - (var2 >> 12))) * 3125;
if (P < 0x80000000)
{
P = (P << 1) / ((uint32_t)var1);
}
else
{
P = (P / (uint32_t)var1) * 2;
}
var1 = (((int32_t)dig_P9) * ((int32_t)(((P >> 3) * (P >> 3)) >> 13))) >> 12;
var2 = (((int32_t)(P >> 2)) * ((int32_t)dig_P8)) >> 13;
P = (uint32_t)((int32_t)P + ((var1 + var2 + dig_P7) >> 4));
return P;
}使用BMP280Lib
初始化调用BMP280_Init();
随后调用BMP280_Read(&bmp280_temp,&bmp280_press);读取温度和气压即可。
在UP的OLED程序中这样使用:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "adc.h"
#include "dma.h"
#include "i2c.h"
#include "spi.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <math.h>
#include <stdio.h>
#include <stdbool.h>
#include "config.h"
#include "oled.h"
#include "app.h"
#include "ds1302.h"
#include "bmp280.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_SPI2_Init();
MX_ADC1_Init();
MX_USART1_UART_Init();
MX_I2C1_Init();
/* USER CODE BEGIN 2 */
#if OLED == 1
// 初始化OLED
OLED_Init();
OLED_DisPlay_On();
OLED_Clear();
OLED_Refresh();
// 初始化3D立方体
InitCube();
#endif
#if DS1302 == 1
//DS1302
ds1302_gpio_init();
//ds1302_init();
uint32_t time_display_tick = 0;
// DS1302时间显示缓存
char time_str1[32],time_str2[32],time_str3[32];
#endif
#if BMP280 == 1
bool bmp280flag = false;
BMP280_Init();
// BMP280数据存储变量
int32_t bmp280_temp = 0; // 温度(原始值,除以100为℃)
int32_t bmp280_press = 0; // 气压(原始值,除以100为Pa)
// BMP280显示缓存
char bmp280_temp_str[32] = "Temp: --.- ";
char bmp280_press_str[32] = "Press: ----.- hPa";
#endif
uint32_t last_refresh_tick = HAL_GetTick();
uint32_t i=0;
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
if(HAL_GetTick() - last_refresh_tick >= 1) {
if(++i >= 60000) i = 0;
last_refresh_tick = HAL_GetTick();
if(i % 100 == 0) bmp280flag = true;
}
OLED_Clear_();
#if OLED == 1
// 核心3D立方体渲染逻辑
RotateCube(); // 旋转立方体
ProjectCube(); // 3D转2D投影
DrawCube(); // 绘制立方体
#endif
// LED同步闪烁
HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13);
#if DS1302 == 1
if(HAL_GetTick() - time_display_tick > 500)
{
time_display_tick = HAL_GetTick();
// 读取DS1302实时时间
ds1302_read_realTime();
sprintf(time_str1, "%04d-%02d-%02d", TimeData.year, TimeData.month, TimeData.day);
sprintf(time_str2, "%02d:%02d:%02d", TimeData.hour, TimeData.minute, TimeData.second);
sprintf(time_str3, "Week:%d", TimeData.week);
}
// 格式化时间字符串(OLED显示)
OLED_ShowString(0, 0, (u8*)time_str1, 16, 1);
OLED_ShowString(0, 16,(u8*)time_str2,16, 1); // 第二行显示时间
OLED_ShowString(0, 32,(u8*)time_str3,16, 1); // 第三行显示星期
#endif
#if BMP280 == 1
if(bmp280flag == true){
bmp280flag = false;
BMP280_Read(&bmp280_temp,&bmp280_press);
float temp = (float)bmp280_temp / 100.0f;
sprintf(bmp280_temp_str,"Temp:%.1f",temp);
float press = (float)bmp280_press / 1000.0f;
sprintf(bmp280_press_str, "Press:%.3f",press);
}
OLED_ShowString(0,0,(u8*)bmp280_temp_str,16,1);
OLED_ShowString(0,16,(u8*)bmp280_press_str,16,1);
#endif
OLED_Refresh();
//HAL_Delay(10); // 控制动画帧率
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
RCC_PeriphCLKInitTypeDef PeriphClkInit = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_ADC;
PeriphClkInit.AdcClockSelection = RCC_ADCPCLK2_DIV6;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */