一、SURF 解决了什么问题?
在 SIFT 之后,工程界的真实痛点是:
| 痛点 | SIFT 的问题 |
|---|---|
| 速度 | DoG + 金字塔 → 慢 |
| 实时性 | 难以用于实时 |
| 嵌入式 | 计算量太大 |
| 工程实现 | 高斯卷积昂贵 |
👉 SURF 的目标很明确:
尽量保住 SIFT 的鲁棒性,同时把速度提上来
SURF(Speeded-Up Robust Features) 是一种快速、尺度与旋转不变的局部特征算法 ,通过 Hessian 矩阵检测关键点 + Haar 小波描述局部结构 ,并利用 积分图像 实现对 SIFT 的数量级加速。
二、SURF 原理(工程化的 SIFT)
SURF = SIFT 的"工程加速版"
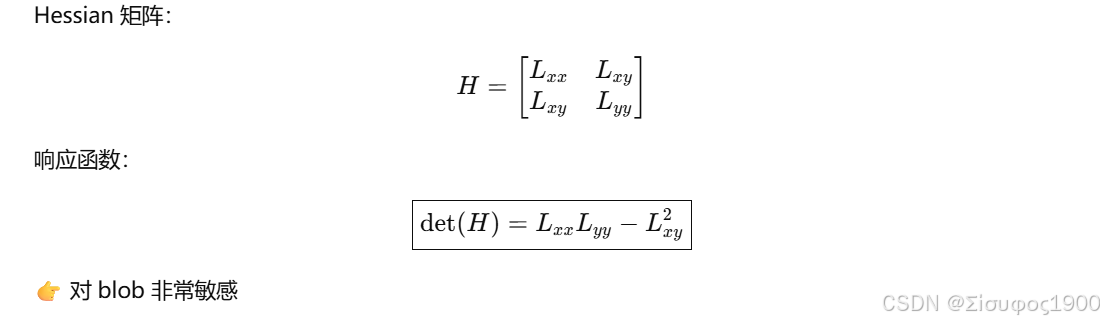
1️⃣ SURF 不用 DoG,用 Hessian
Hessian 矩阵:
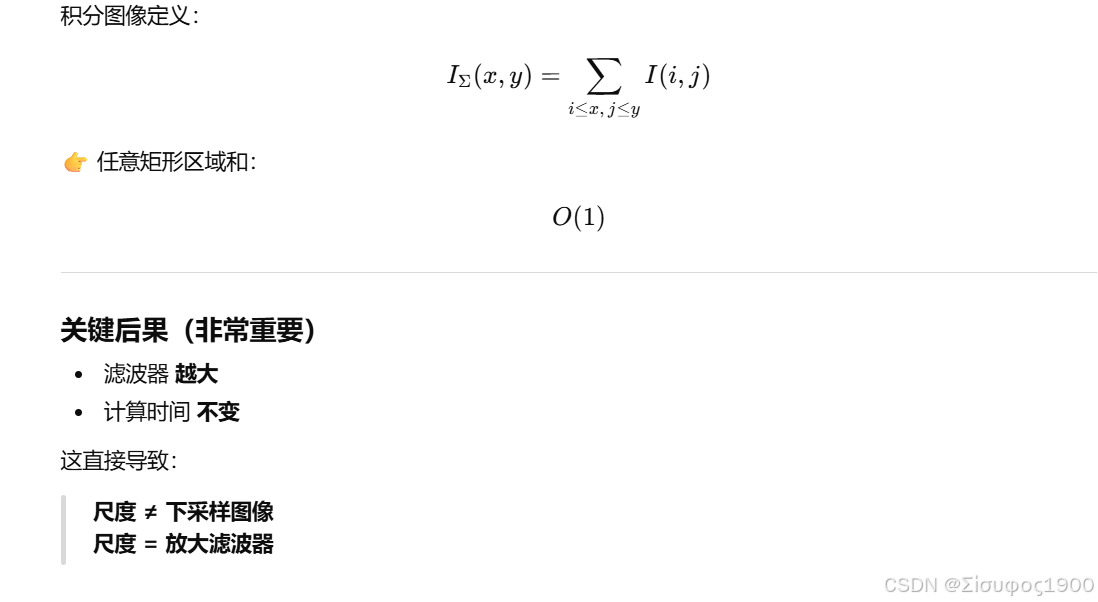
2️⃣ 积分图像(SURF 的速度核心)
盒式滤波 ≈ 高斯二阶导数
-
复杂度与尺度无关
-
多尺度 = 改滤波器大小
3️⃣ 尺度空间(不用下采样)
SIFT:
- 图像降采样
SURF:
- 滤波器变大
👉 更快,更工程
4️⃣ 主方向(Haar 小波)
-
在邻域内统计 Haar 响应
-
最大方向作为主方向
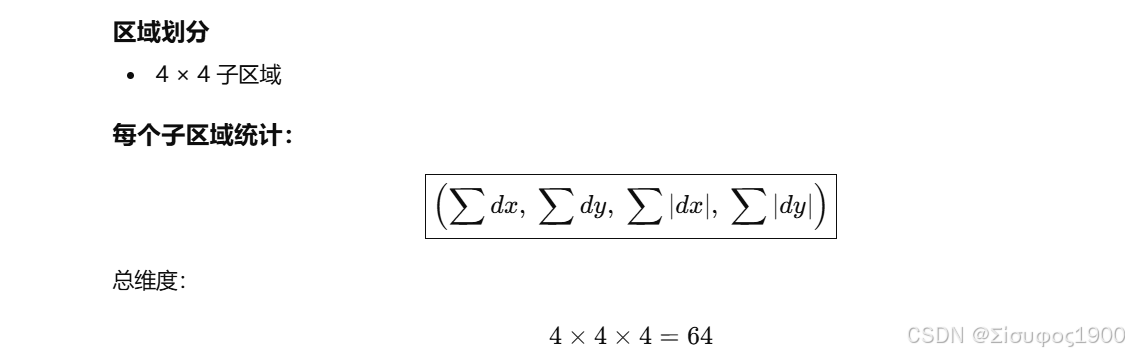
5️⃣ 描述子(64 维)
-
4×4 子区域
-
👉 比 SIFT:
-
更短
-
更快
-
稍逊精度
四、积分图像:SURF 为啥快?
五、SIFT vs SURF(本质对比)
SIFT
-
图像下采样
-
固定高斯核
SURF
-
图像不变
-
滤波器尺寸变化
工程上极其友好
| 项目 | SIFT | SURF |
|---|---|---|
| 核心算子 | DoG | Hessian |
| 尺度构建 | 高斯金字塔 | 滤波器尺度 |
| 描述子 | 128 维 | 64 维 |
| 精度 | 高 | 略低 |
| 速度 | 慢 | 快 |
| 专利 | ❌(已过期) | ❌(已过期) |
六、在 OpenCV / HALCON 里怎么体现?
OpenCV
-
xfeatures2d::SURF -
Hessian 阈值 = 关键点密度控制
HALCON
-
points_harris,points_hessian -
describe_points(类似 SURF 描述子)
👉 HALCON 更偏 算子解耦