想在树莓派上玩转目标检测算法吗?本教程将手把手带你完成YOLOv5在树莓派上的完整部署流程,即使是嵌入式设备也能实现目标检测!
往期学习资料:
在接下来的内容中,我们将使用树莓派4B(4GB内存版本) 和YOLOv5s(最小模型) 作为演示平台,但方法论同样适用于其他型号。让我们开始这段边缘AI之旅吧!
教程亮点:
✅ 详细的环境配置步骤,避坑指南
✅ 实用优化技巧,帧率提升200%+
✅ 完整代码示例,开箱即用
✅ 实际效果演示与性能评估
开始前的准备:
-
树莓派4B及电源
-
16GB以上TF卡
-
摄像头模块(可选,可使用USB摄像头替代)
-
基础的Linux命令行知识
接下来,我们将从系统环境搭建开始...
1.环境搭建
环境说明:
树莓派环境:
Linux raspberrypi 4.19.118-v7l+ #1311 SMP Mon Apr 27 14:26:42 BST 2020 armv7l GNU/Linux
python版本为3.7
torch 1.8.1
torchvision 0.9.1
matplotlib 3.4.3
numpy 1.21.4
opencv-python 4.4.0.44
pandas 1.3.5
Flask 1.0.2
Pillow 9.5.0
requests 2.21.0
scipy 1.7.3
seaborn 0.11.0
tqdm 4.67.1
在树莓派中搭建pytorch,我这里安装的是pytorch1.8.1,pytorch在树莓派中的安装可以参考我之前往期学习中的文章,里面有教程
2.代码运行
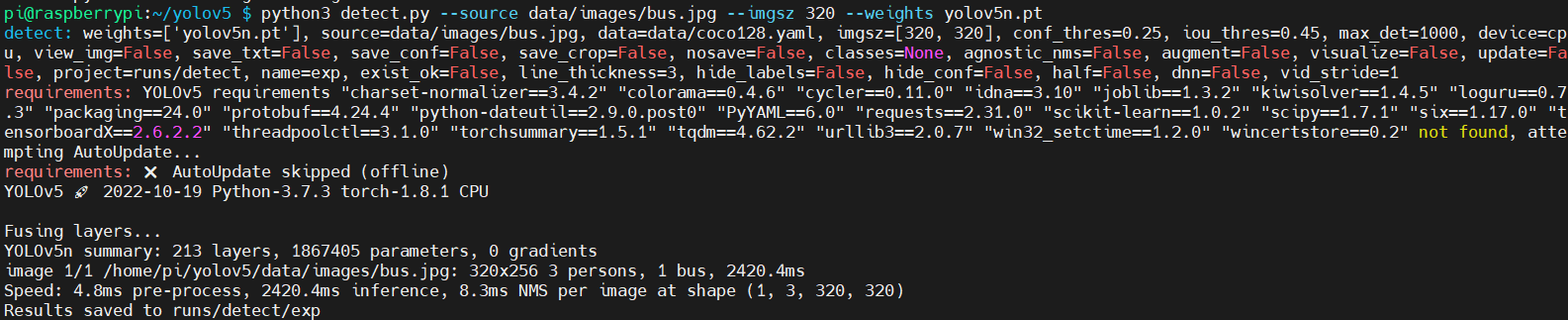
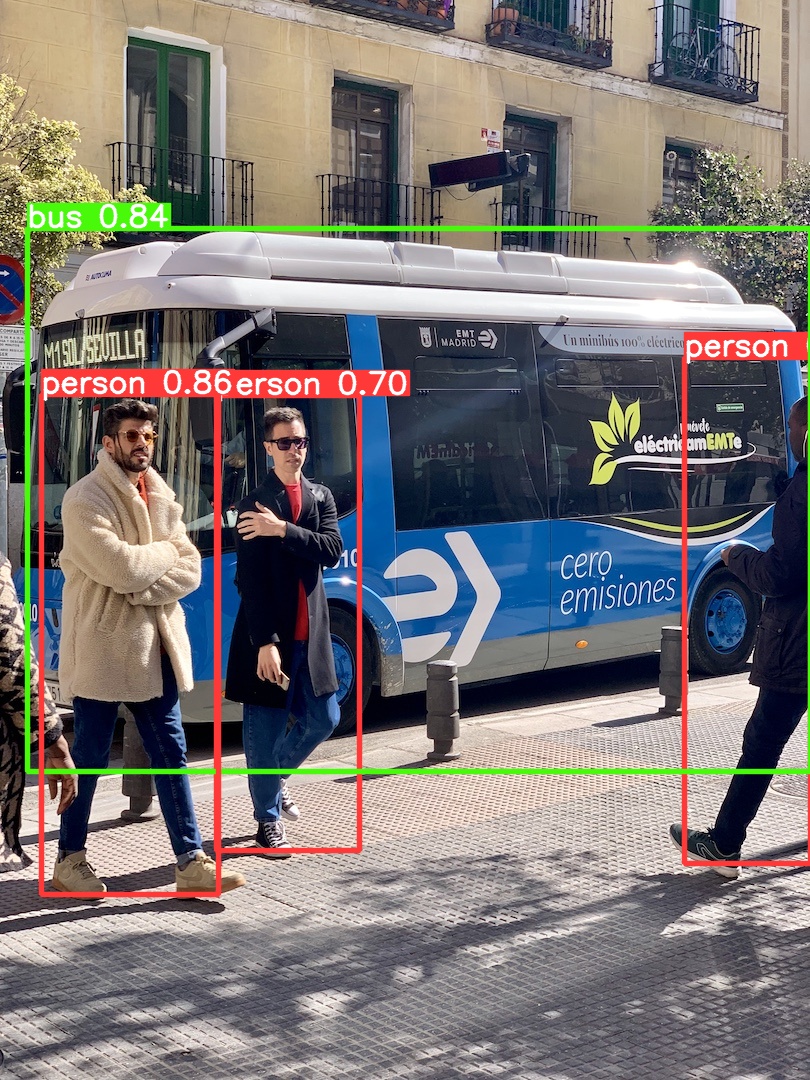
将项目(我这里用的yolov5是6.2版本的)拷贝到树莓派中,运行以下命令开启检测。代码可以去官网下载。
bash
python3 detect.py --source data/images/bus.jpg --imgsz 320 --weights yolov5n.pt出现以下内容表示检测成功: