该软件目前暂无中文版,英语能力尚可可参考操作教程:https://docs.isaacsim.omniverse.nvidia.com/5.1.0/introduction/quickstart_isaacsim.html
1 启动Isaac Sim
打开终端
isaacPS.前文安装Isaac是已经配置好存储路径,详见https://blog.csdn.net/weixin_45728280/article/details/157365131?spm=1011.2415.3001.5331
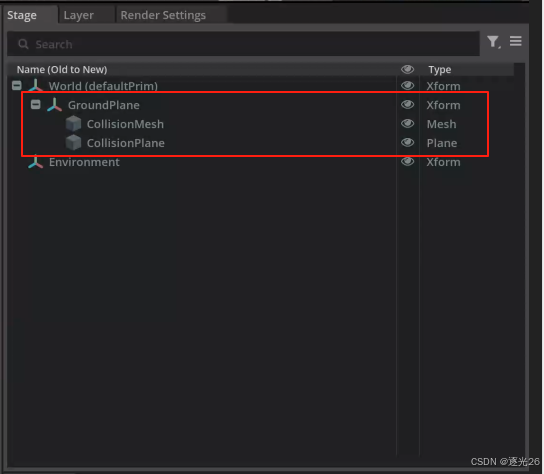
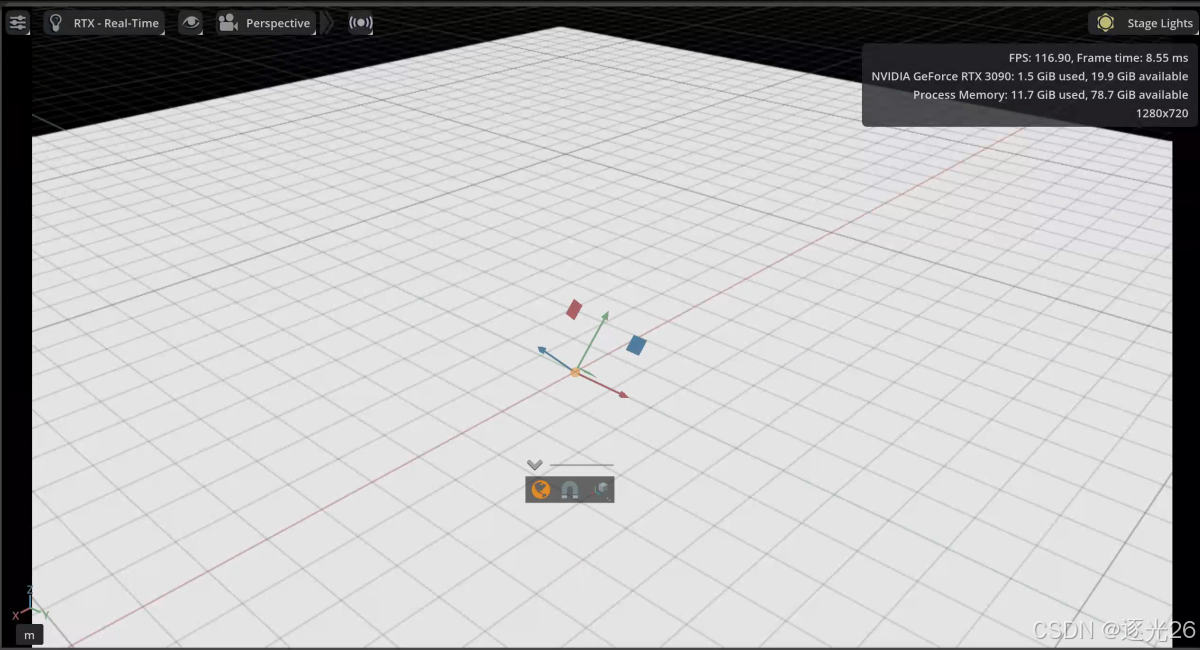
2 添加地面
菜单栏左上角Create > Physics > Ground Plane
3 添加灯光
菜单栏左上角Create > Lights > Distant Light
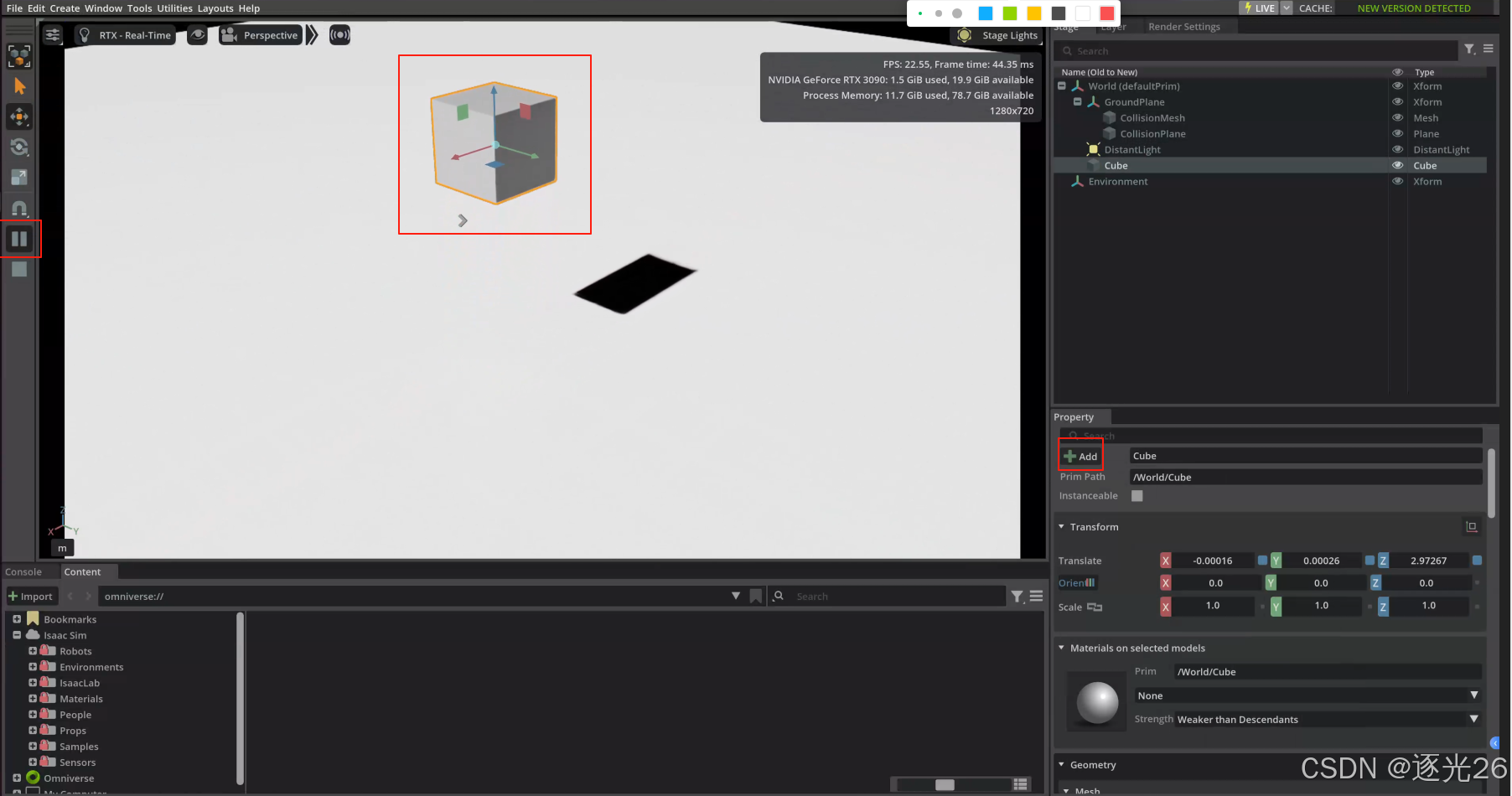
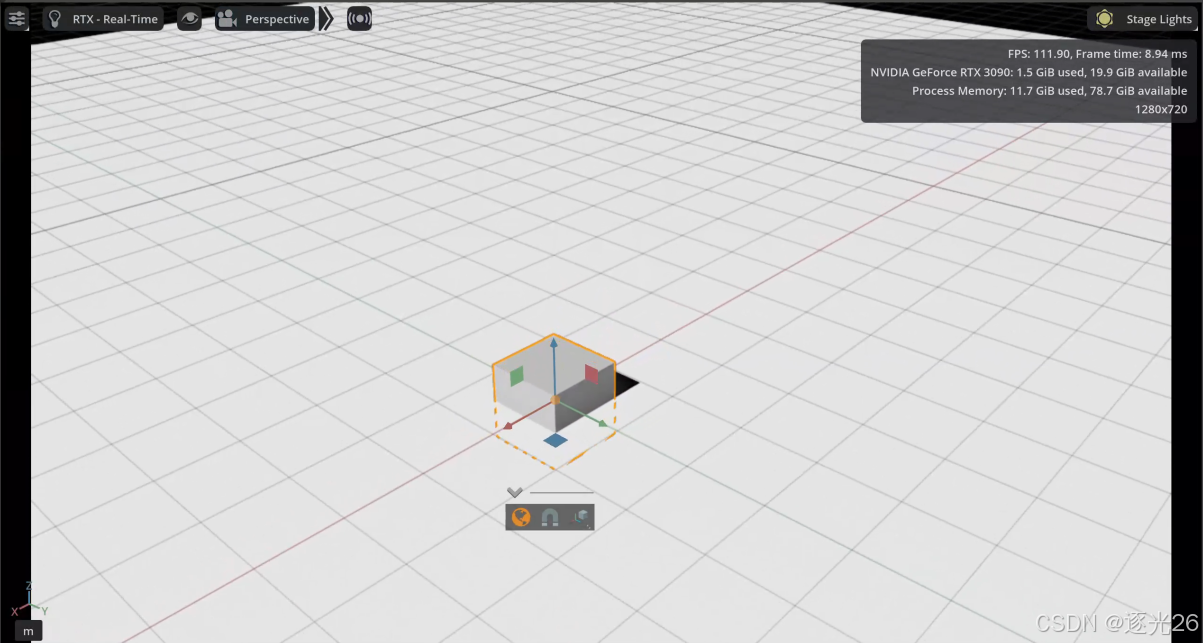
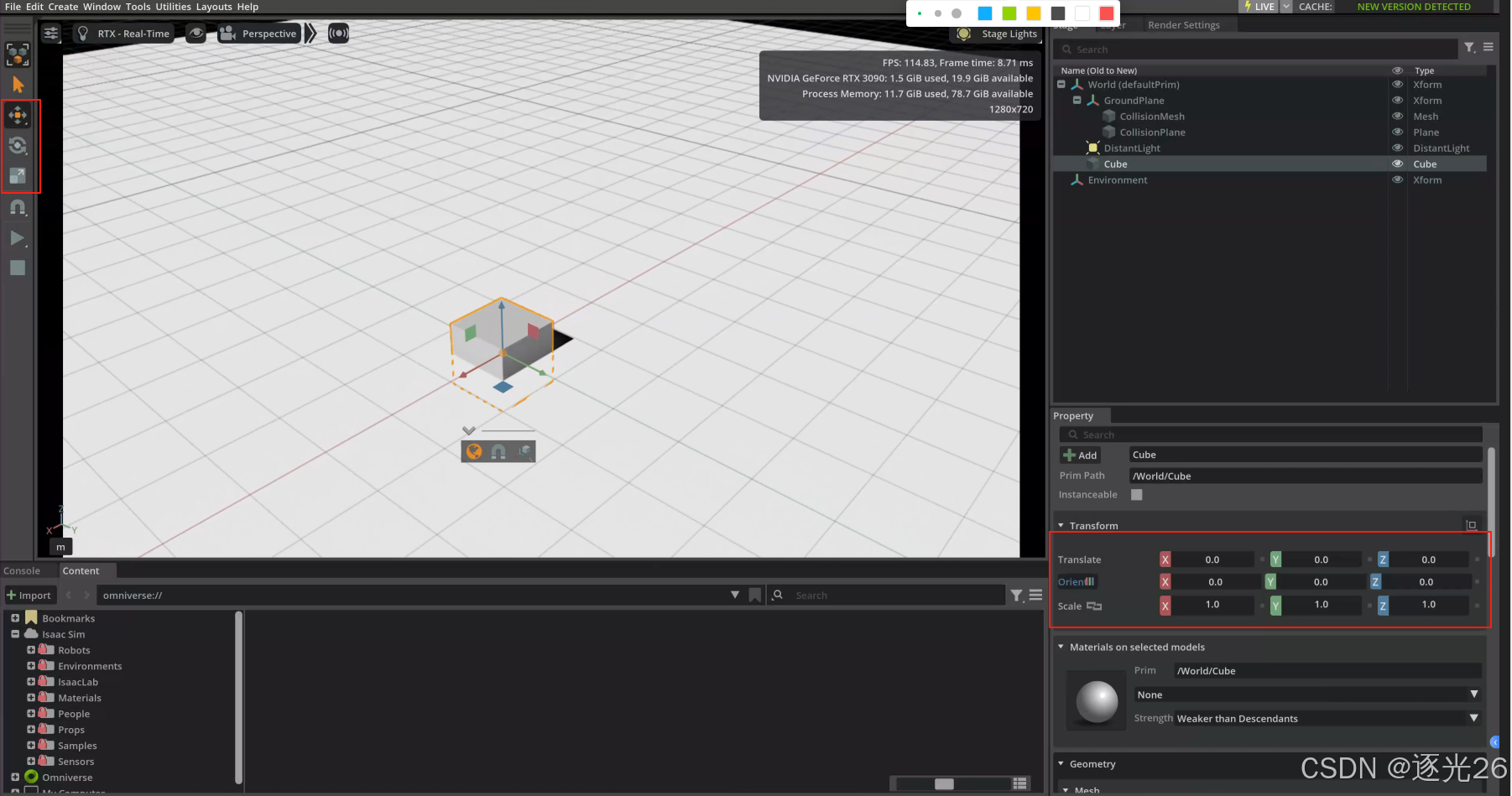
4 添加方块
菜单栏左上角Create > Shape > Cube。注意此时添加的物体没有物理属性(如质量、惯性矩阵等),需要后续自行添加。
平移W、旋转E、尺寸R调整可以通过左侧菜单栏选择+坐标轴移动实现,亦可通过选中物体修改右下栏相关参数实现,我们平移Z轴为后续重力测试铺垫。
5 添加物理属性
选中方块-页面右下Add-Physics-Rigid Body with Colliders Preset-左侧工具栏Play,看到方块因重力影响坠落。