摘要
该次设计旨在根据客户方的生产工艺及产品质量要求,解决无人机花键传动轴的加工工艺设计问题,以保证产品的生产质量和加工成本,具有重要的实用价值。
根据零件的生产要求,进行机械制造工艺规程设计,设计目标为无人机花键传动轴,对花键传动轴进行零件分析,设计其整体的机械加工工艺方案。花键传动轴是在日常的设计加工过程中较为常见的非标准件,虽然花键轴不是标准件,但是花键有标准参数,一般用途的花键轴均按照花键轴标准参数来进行设计。
本次设计的无人机花键传动轴整体采用车削与铣削的加工方式,选择采用数控加工机床,通过对零件分析,安排整体机械加工工艺,选取合适的机加刀具,确定合适的走刀路线,进行手动编程,编程程序准确,能够在数控机床上准确运行。
本次工艺设计,根据相关的工艺设计理论,以及相关的国家标准,进行设计,对同类产品工艺设计有一定的借鉴价值,可供相关技术人员参考。
关键词:花键传动轴;加工工艺;数控铣削;数控车削
1 工艺方案设计
数控加工工艺路线的设计与通用机床加工工艺路线设计的区别,在于它一般并不指是从毛坯到半成品再到完成品的整个工艺过程,而仅仅是几道甚至是多组数控加工工艺过程的详细描述20。由于数控加工一般都贯穿于零件加工的整个工艺中,因此务必与其他通用加工工艺衔接好。
1.1 确定加工方案
本次零件的加工大致可以分为两个阶段,一是零件阶梯轴的加工,二是零件花键及键槽的加工方式。本次设计将按照这两部分来写。
轴类零件为典型的回转体结构,本类零件的加工方式为车削加工,零件部分尺寸精度要求较高,以及表面粗糙度的要求较高,可在数控车床上加工完成,但是需要选取合适的数控车床。
除此之外,该零件上未加工要素还有两个,一个是花键,一个是零件上的键槽加工。两个都是采取标准化参数设计的,所以,在加工时有较为成熟的加工方式,我们要根据零件的具体要求选取合适的加工方式。
花键有标准化参数,所以在加工方式上也较为成熟,目前花键的加工方法是有很多的。一般常见的主要是采用滚切、铣削和磨削等切削加工方法,部分花键的加工方法也可采用冷打、冷轧等塑性变形方式21。
轴上键槽的加工方式一般采取铣削的方式进行加工,需要采用键槽铣刀铣削加工,在加工过程中需要注意的是是同轴度、对称度,键槽深一些问题不大,但是键槽的宽度尺寸一定要保证,不能宽度尺寸不能大了。
本次无人机花键传动轴加工花键的加工方式,综合考虑整体要求采用铣削的加工方式进行花键及键槽的加工。
2 加工方案设计
2.1 车削加工方案设计
数控车床是使用最广泛的数控机床之一。根据以上制定完备的工艺路线,我们已经知道了本次加工需要数控车床进行加工,数控车床主要用于加工各种回转表面。如内外圆柱面、圆锥面、回转体成型面、环形槽、端面及螺纹,还可进行钻孔、扩孔、铰孔、滚花等加工23。
2.1.1 车削加工设备的选择
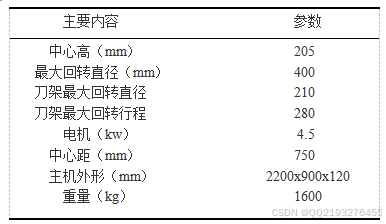
在加工设备的选择上,结合在学校所接触到的以及实习企业接触到的数控设备。综合考虑后选取CK6140数控车床来进行数控加工。设备的参数具体如表3.1:
表3.1机床参数
2.1.2 车削夹具的选择
夹具决定工件在机床坐标中的位置,因此在加工过程中使用的夹具必须能够保证机床坐标系中工件的精确坐标方向。我们使用的夹具也必须适合机床坐标系中工件的尺寸。一般常用的通用夹具有三爪卡盘、虎钳,除此之外还有专用夹具,但是一般考虑经济等原因,一般优先考虑选用通用夹具为加工的夹具。本次加工夹具采用三爪定心卡盘,在夹紧时能够自动地对工件进行中心定位24。使用三爪卡盘时,为了确保足够的夹紧力,必须保持20mm或更长的夹紧长度。具体的三爪卡盘结构图如图3.1所示。

图3.1 三爪定心卡盘
2.1.3 编写程序
我首先对零件图纸进行分析,在分析后发现,在车削无人机花键传动轴时主要涉及直线、切槽以及钻孔。一般在加工零件时都分为粗加工和精加工。在程序编写时,用到的指令有:G00、G01、G21、G40、G71、G70、G97、M00、M03、M05、M30。
⑴ G21 指令是指定公制编程。即 X (U)、 Z (W)、 R 等坐标尺寸字所描述的单位为 mm。
⑵ G40 指令是刀尖半径补偿取消,按照程序指令路径进给。
⑶ G97 指令是主轴速度控制指令(恒线速度控制)。
格式:G97 S_;
其中,S 控制主轴转速,单位为 r/min。
⑷ G71 指令是成形粗车循环。该切削方式是每次粗切的轨迹形状都和成品形状相似,
只是在位置上由外向内环地向最终形状靠近。
格式:G71 U(i)R(m) P(ns)Q(nf)U(u)W(w)F(f)S(s)T(t);
i---X向每次背吃刀量;
u、w---分别为 X 轴(直径值)和 Z 轴方向上的精加工余量;
ns---精加工程序段中开始程序段的段号;
nf---精加工程序段中结束程序段的段号;
F、S、T---粗切时的进给速度、主轴转速和刀补设定。此时,这些值将不再按照精加工的设定
⑸ G70 指令是精加工循环指令。
格式:G70 P(ns)Q(nf);
其中,ns---精加工轮廓程序段中开始程序段的段号;
nf---精加工轮廓程序段中结束程序段的段号。
⑹ G00 指令是快速定位。该指令控制刀具快速从当前位置移动到指定的位置,一般用在空程运行中,如退刀和快速进刀。
格式:G00 X(U)Z(W) ;
其中,X(U)_Z(W)_指定移动轨迹终点位置坐标。
⑺ G01 指令是直线插补。 该指令控制刀具以某个速度从当前位置移动到指定的位置(只能沿直线方向走)。
格式:G01 X(U)_Z(W)F ;
其中,X(U)_Z(W)_指定移动轨迹终点位置坐标;
F---控制刀具移动的速度,在使用 G98 时,F 的单位是 mm/min。当
使用 G99 时,F 的单位是 mm/r。
⑻ M00 程序停止指令。
⑼ M03 主轴正转(CW)指令。
⑽ M05 主轴停止指令
⑾ M30 程序结束并返回指令。
为了方便编程,有工作人员在工件图纸上设置工件坐标系,也叫编程坐标系,其原点就是工件原点,也叫编程原点,我们通常在工件右端设置标准点为车削加工的编程原点。
本次设计的无人机花键传动轴分为两次装夹,为了方便加工,一次装夹需要完成一侧的所有可加工程序,然后进行调头装夹,完成另一侧的加工程序。
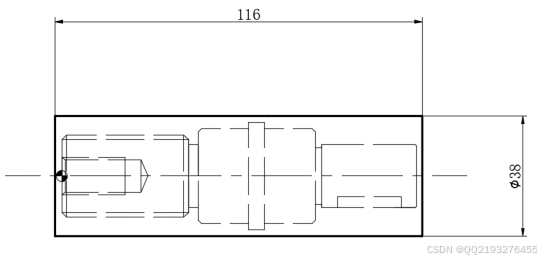
图3.2左侧编程原点
所以在编写程序时,主要分为两个程序,左侧编程原点如图3.2所示,表3.5所示的编程程序为花键轴左侧轮廓的加工程序,其中包括Φ26mm,Φ30mm,Φ34mm外圆面,倒角,位于零件中心的螺纹底孔,以及左侧宽度为3mm的槽。程序采用G71 指令是成形粗车循环,最后用G70 指令进行精加工循环。用中心钻对中心孔进行加工,最终采用切槽刀对零件进行切槽加工。
3 样件加工
根据本次设计的加工方案对零件进行样件加工。本次无人机花键传动轴样件加工通过CK6140数控车床以及X5020A立式铣床两种不同的数控设备相互配合共同加工完成,采用的刀具包括外圆车刀、切槽刀、外螺纹车刀、键槽铣刀与成型花键铣刀等多种类型,因为刀具在不断地加工中会有磨损,造成实际尺寸的不同,所以在设置加工参数上也会与理论上的数值不同。具体的零件加工过程较设计的方案出入不大,在加工完成后,对加工后的零件进行检测,检测结果符合零件图纸要求,随着样件的顺利加工完成,标志着本次机械加工工艺方案设计的完成。最终得到的样品如图4.1所示。

图4.1 无人机花键传动轴样品
4 加工质量检测
4.1 加工质量检测
我在加工零件的整个过程中,遇到了很多的问题,这些问题来自于不同的方面。有来自于机床上的问题也有来自于加工方面的问题,在这些问题的解决上,我问过老师,也问过同学还上网查过资料。我通过各方对我的帮助和支持,很好的解决了这些问题,以下就是加工质量问题的分析:
首先,我们在机床的选择上选择了CK6140,机床的加工精度还不够高。
其次,零件的加工精度受夹具和刀具的影响。我在加工过程中遇到径向或者端面跳动的情况,分析原因发现这是因为夹具没有装夹平衡,从而导致产生误差。在加工过程中还遇到过工件产生误差或者粗糙度偏大的问题,分析原因发现,刀具在加工过程中发热以及刀片装夹不稳定造成的。我们对刀的精确程度也深深影响着加工精度。当我们采用手工对刀的方式时,会有对刀不准确产生误差的事情发生。
最后,冷却液也能影响到零件的加工精度。在加工时,工件与道具摩擦会产生大量的热,从而导致工件热变形,同时也会加剧刀具的损坏程度。因此,选择合理的冷却液以及冷却方式显得非常重要,他们会直接影响加工精度。除上述原因之外,还有些原因,如:机床主轴本身有摆动情况、机床有振动、刀刃太长,刀具硬度不够等等都会影响到加工精度和光泽度。
5.2 改善方法
我们可以通过两种方式来改善,第一我们可以对车床进行定期的维护和保养,第二当我们发现有磨损的零件时应该进行及时更换。通过这两种方式可以提高精度。通过把车床的精度定期调校、对刀时提高精度等方法也可以降低误差。
在加工零件时,尽量选择刚度大、刀刃短的刀具来使用。同时,在加工的过程中为达到降低切削力的目的,应该优先采用高转速,快进给;小切深,大切宽的工艺参数。
5 结论
本次设计是无人机花键传动轴加工工艺设计,通过分析无人机花键传动轴的零件图,选择毛坯,绘制毛坯图,确定零件的加工工艺,并对零件加工的每个阶段进行了详细的设计,包括夹具、刀具和机床的选择,确定切削余量和工件的定位基准,根据所学知识,编制G代码程序和制作仿真视频。以保证本次设计的完整性,能够使本次的机械加工工艺方案有效的加工出符合零件图纸要求的零件。