自动避障路径选择 Matlab路径规划算法 自己研究编写路径规划仿真
在智能系统的领域中,自动避障路径选择是一个极其关键的问题。无论是自动驾驶汽车在复杂道路上穿梭,还是机器人在充满障碍物的环境中执行任务,高效且准确的路径规划算法都是实现安全与智能运行的核心。今天,咱们就来聊聊用 Matlab 实现路径规划算法,并进行相关仿真的有趣过程。
Matlab:路径规划的得力工具
Matlab 凭借其丰富的工具箱和强大的数值计算能力,成为了路径规划算法研究与实现的绝佳平台。它提供了各种便捷的函数和可视化工具,让我们可以轻松地构建模型、编写算法并进行仿真验证。
自己动手编写路径规划算法
咱们以一个简单的基于 A算法的自动避障路径规划为例。A 算法结合了 Dijkstra 算法的广度优先搜索策略和贪心算法的最佳优先搜索策略,能在搜索空间中找到从起点到终点的最优路径,同时巧妙避开障碍物。
下面是一个简化的 A* 算法 Matlab 代码示例:
matlab
% 定义地图尺寸和障碍物位置
map_size = [100, 100];
obstacles = [20:30, 50:60]; % 假设障碍物位置
% 起点和终点
start = [10, 10];
goal = [90, 90];
% 初始化代价和父节点数组
g_score = inf(map_size(1), map_size(2));
g_score(start(1), start(2)) = 0;
f_score = inf(map_size(1), map_size(2));
f_score(start(1), start(2)) = heuristic(start, goal);
came_from = zeros(map_size(1), map_size(2), 2);
open_set = [start];
while ~isempty(open_set)
% 找到 f_score 最小的节点
[~, current_index] = min(f_score(sub2ind(map_size, open_set(:, 1), open_set(:, 2))));
current = open_set(current_index, :);
if all(current == goal)
% 找到了路径,回溯生成路径
path = [];
while ~all(current == start)
path = [current; path];
current = came_from(current(1), current(2), :);
end
path = [start; path];
break;
end
open_set(current_index, :) = [];
% 检查邻居节点
for dx = -1:1
for dy = -1:1
neighbor = current + [dx, dy];
if neighbor(1) >= 1 && neighbor(1) <= map_size(1) && neighbor(2) >= 1 && neighbor(2) <= map_size(2) &&...
~ismember(neighbor(1), obstacles) && ~ismember(neighbor(2), obstacles)
tentative_g_score = g_score(current(1), current(2)) + 1;
if tentative_g_score < g_score(neighbor(1), neighbor(2))
came_from(neighbor(1), neighbor(2), :) = current;
g_score(neighbor(1), neighbor(2)) = tentative_g_score;
f_score(neighbor(1), neighbor(2)) = tentative_g_score + heuristic(neighbor, goal);
if ~ismember(neighbor, open_set, 'rows')
open_set = [open_set; neighbor];
end
end
end
end
end
end
function h = heuristic(a, b)
h = abs(a(1) - b(1)) + abs(a(2) - b(2));
end代码分析
- 地图与参数初始化 :
- 我们首先定义了地图的尺寸
mapsize*,这里设置为100x100的网格。同时,定义了障碍物所在的位置obstacles,这里简单设定了两个区域为障碍物。起点start和终点goal也被明确设定。 - 初始化了
g*score(从起点到当前节点的实际代价)、fscore*(从起点经过当前节点到终点的估计总代价)和came*from(记录路径上每个节点的父节点)数组。open_set用于存储待探索的节点。
- 我们首先定义了地图的尺寸
- 主循环 :
- 在
while循环中,只要openset**不为空,就不断从openset中选取f*score**最小的节点current。 - 如果当前节点就是终点,说明找到了路径,通过回溯
came*from数组生成最终路径。 - 否则,检查当前节点的邻居节点。邻居节点在地图范围内且不在障碍物位置时,计算从起点到邻居节点的试探性代价
tentativegscore。 - 如果这个试探性代价小于邻居节点当前记录的
gscore*,则更新邻居节点的came*from、gscore**和fscore,并将邻居节点加入open_set。
- 在
- 启发式函数 :
heuristic函数用于估计从当前节点到终点的代价。这里采用曼哈顿距离作为启发式函数,简单计算两个节点在横纵方向上的距离之和。
路径规划仿真
有了算法代码,接下来就是进行仿真,看看我们规划的路径效果如何。Matlab 的可视化功能可以帮助我们将路径直观地展示出来。
matlab
% 绘制地图和路径
figure;
hold on;
for i = 1:size(obstacles, 2)
rectangle('Position', [obstacles(i), 1, 1, map_size(2)], 'FaceColor', 'r');
end
for i = 1:size(path, 1)
plot(path(i, 2), path(i, 1), 'bo - ');
end
plot(start(2), start(1), 'go', 'MarkerSize', 10);
plot(goal(2), goal(1), 'ro', 'MarkerSize', 10);
xlabel('X 坐标');
ylabel('Y 坐标');
title('自动避障路径规划仿真');
axis([1 map_size(2) 1 map_size(1)]);
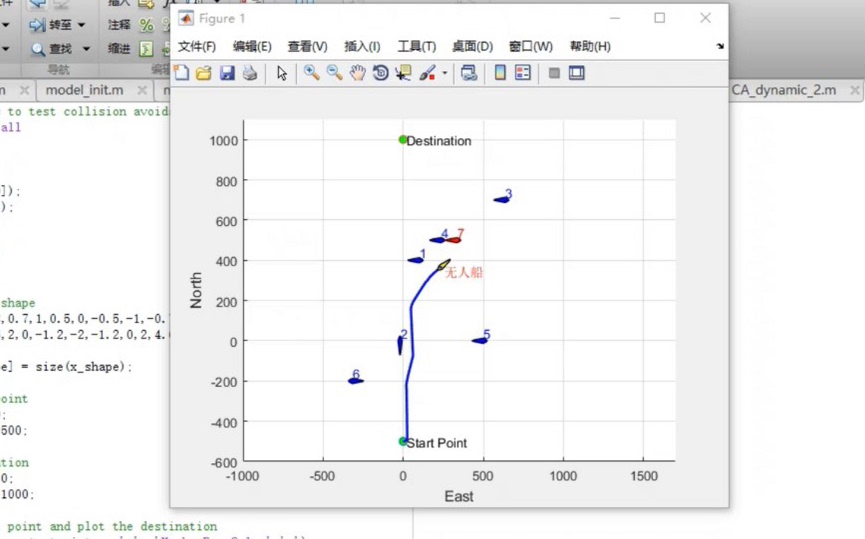
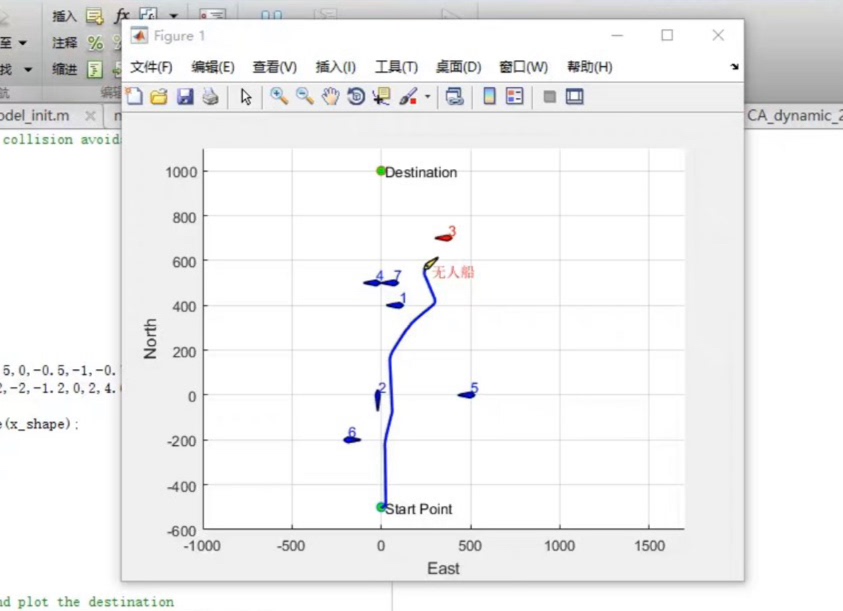
hold off;仿真分析
这段代码利用 Matlab 的图形绘制函数,将地图中的障碍物用红色矩形表示,规划出的路径用蓝色线条和圆圈表示,起点用绿色圆圈,终点用红色圆圈。通过这个简单的可视化,我们可以直观地看到路径规划算法是否成功避开了障碍物,并找到了从起点到终点的合理路径。
自动避障路径选择 Matlab路径规划算法 自己研究编写路径规划仿真
在实际应用中,还可以进一步优化算法,比如采用更复杂的启发式函数,或者针对不同的环境特点对算法进行调整。同时,仿真过程也可以添加更多的细节,比如动态障碍物的处理等。
通过自己研究编写路径规划算法并用 Matlab 进行仿真,不仅能深入理解路径规划的原理,还能为实际应用打下坚实的基础。希望大家都能在这个有趣的领域中发现更多好玩的东西!