一、触点指令核心解析
触点是梯形图中控制能流通断的核心元件,对应布尔变量状态,分为基础触点和特殊触点,均为"软触点",无物理损耗,状态由PLC映像寄存器存储单元控制。
|-------|---------|--------------|---------|
| 触点类型 | 图形符号 | 逻辑状态 | 应用场景 |
| 常开触点 | ──┤ ├── | 变量为1时闭合 | 正常启动条件 |
| 常闭触点 | ──┤/├── | 变量为0时闭合 | 停止、互锁条件 |
| 上升沿触点 | ──┤P├── | 0→1变化时接通一个周期 | 单次触发 |
| 下降沿触点 | ──┤N├── | 1→0变化时接通一个周期 | 下降沿检测 |
1. 基础触点(常开/常闭)
- 常开触点(NO):默认状态为断开(FALSE),当对应布尔变量为TRUE时闭合,允许能流通过;变量为FALSE时保持断开。状态传递规则:仅左侧能流为TRUE时,才将自身状态同步至右侧,否则右侧状态为FALSE。
- 常闭触点(NC):默认状态为闭合(TRUE),当对应布尔变量为TRUE时断开,阻断能流;变量为FALSE时保持闭合。传递规则与常开触点一致,仅初始状态和触发逻辑相反。
2. 特殊触点(上升沿/下降沿)
用于检测变量状态跳变,仅在跳变瞬间传递能流,持续1个扫描周期后复位,适用于触发一次性动作(如计数器启动、信号报警)。
- 上升沿触点:当变量从FALSE→TRUE跳变时,触点瞬间闭合(1个周期),传递能流;其他状态均断开。
- 下降沿触点:当变量从TRUE→FALSE跳变时,触点瞬间闭合(1个周期),传递能流;其他状态均断开。
3. 线圈指令核心解析
线圈对应实际设备状态,接收左侧能流信号并控制变量状态,核心分为瞬时线圈、置位/复位线圈,需严格规避双线圈问题。
- 瞬时线圈:左侧能流为TRUE时,线圈通电(变量为TRUE);能流为FALSE时,线圈断电(变量为FALSE),状态随能流实时变化。
- 置位线圈(S):左侧能流为TRUE时,线圈置位(变量锁定为TRUE),即使后续能流消失,仍保持TRUE;需对应复位线圈触发才能恢复FALSE。
- 复位线圈(R):左侧能流为TRUE时,线圈复位(变量锁定为FALSE),即使后续能流消失,仍保持FALSE;需对应置位线圈触发才能恢复TRUE。
二、实操案例:电机启停控制(带自锁与急停)
1. 控制需求
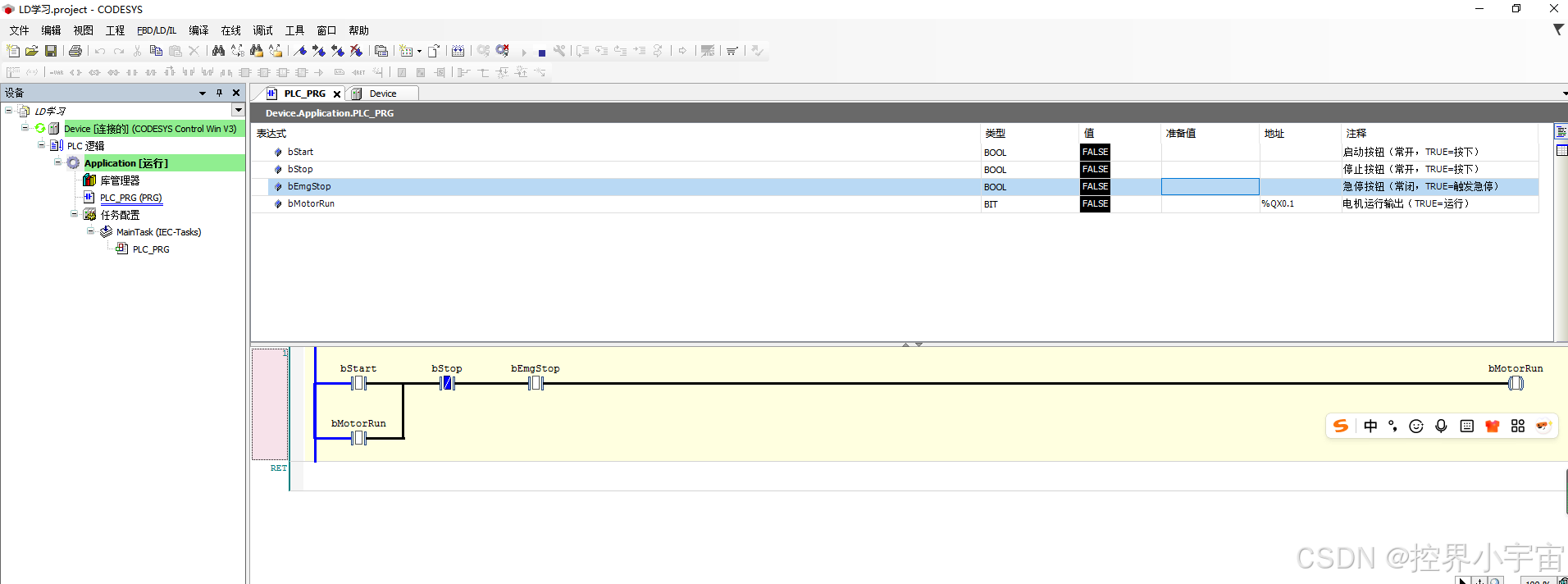
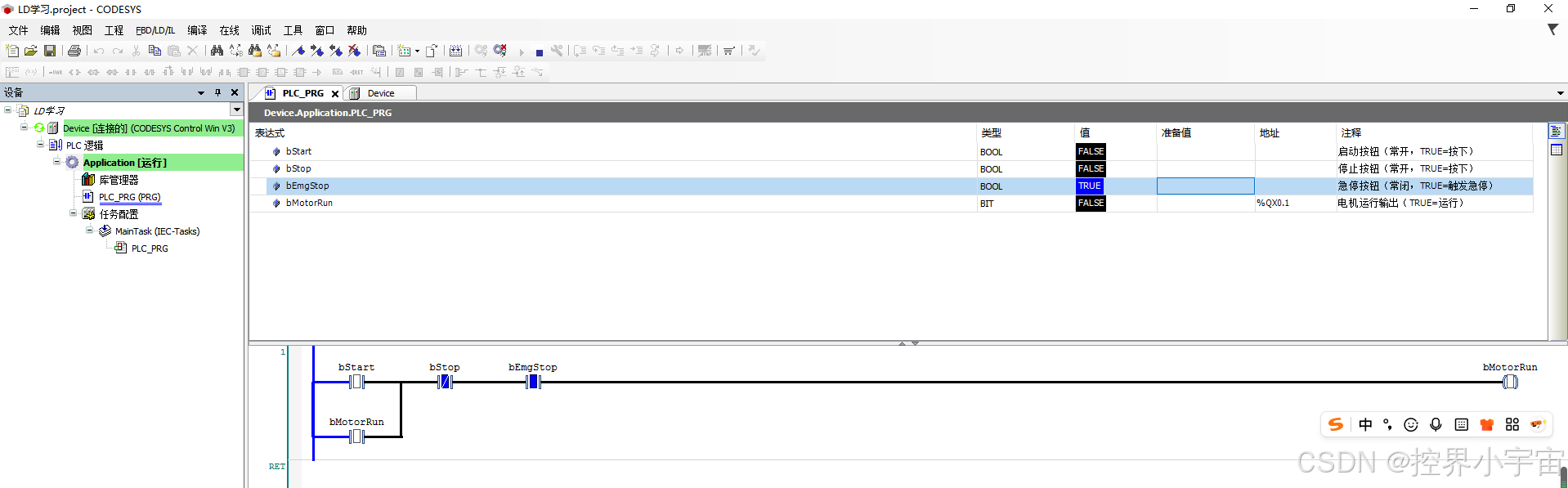
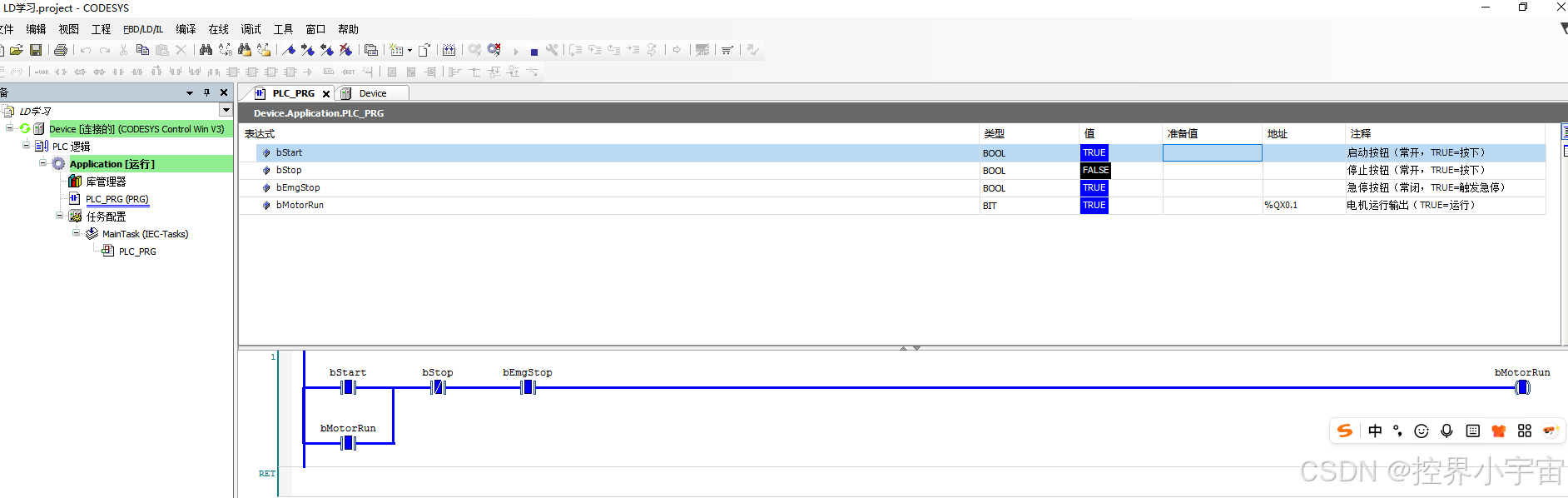
实现电机的手动启停控制:① 按下启动按钮(bStart),电机运行(bMotorRun)并自锁;② 按下停止按钮(bStop)或急停按钮(bEmgStop),电机停止;③ 急停优先级最高,触发后需复位急停才能再次启动。
2. 变量声明
|---------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
| PROGRAM PLC_PRG VAR bStart:BOOL; //启动按钮(常开,TRUE=按下) bStop:BOOL; //停止按钮(常开,TRUE=按下) bEmgStop:BOOL; //急停按钮(常闭,TRUE=触发急停) bMotorRun AT%QX0.1:BOOL; //电机运行输出(TRUE=运行) END_VAR |
3. 程序及指令应用解析
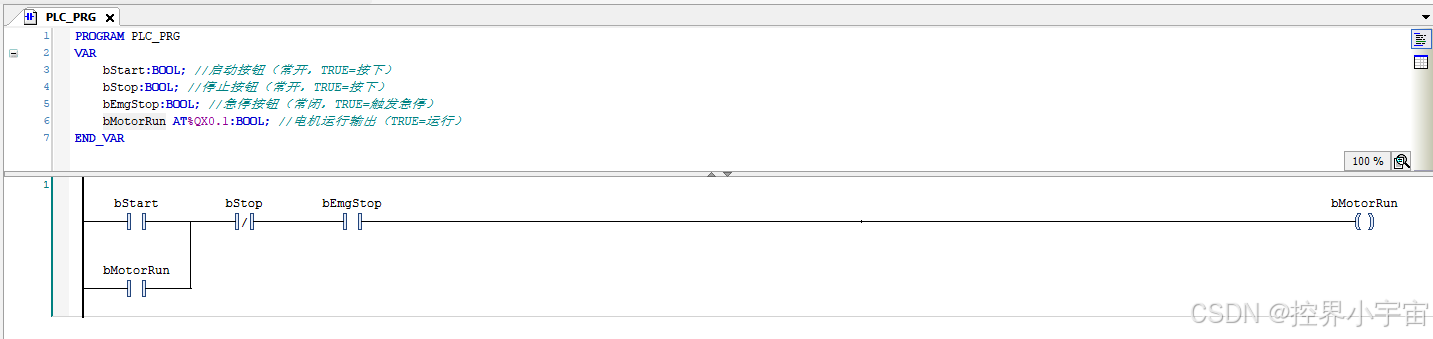
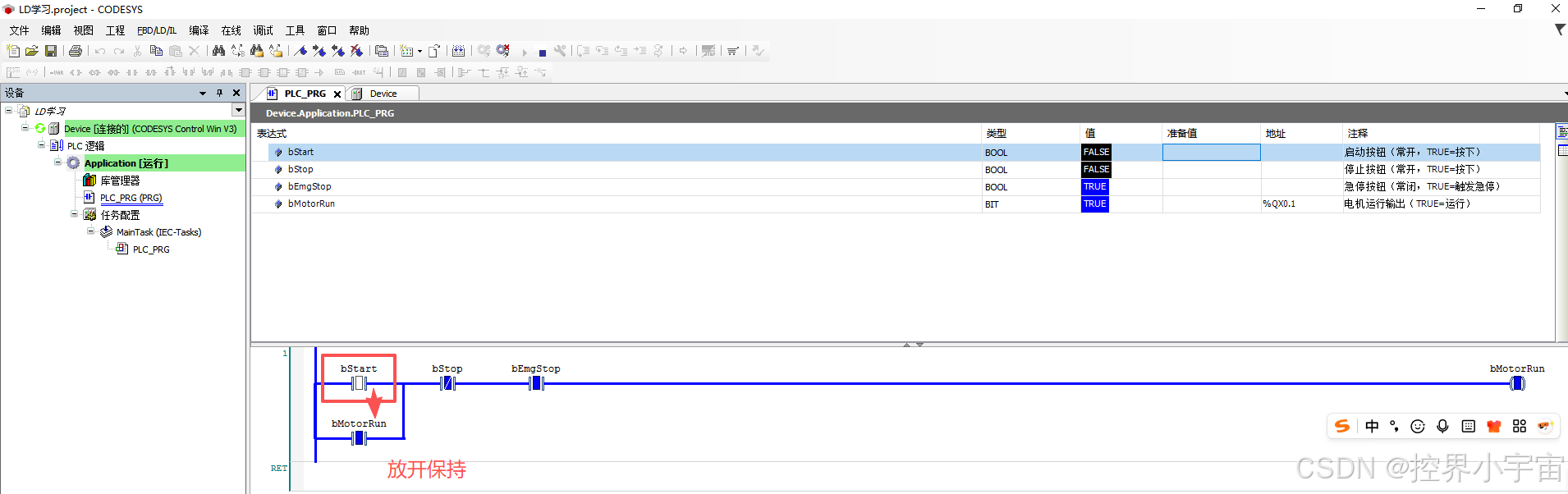
- 自锁逻辑:通过bMotorRun常开触点与bStart常开触点并联,触发后保持能流,实现电机持续运行。当bStart按下时,能流通过触点触发bMotorRun瞬时线圈通电,同时并联的bMotorRun触点闭合,即使bStart松开,能流仍可通过并联触点维持,实现自锁。
- 停止逻辑:串联bStop常开触点和bEmgStop常闭触点,当bStop按下(触点闭合,阻断能流)或bEmgStop触发(常闭触点断开,阻断能流)时,bMotorRun线圈断电,电机停止。
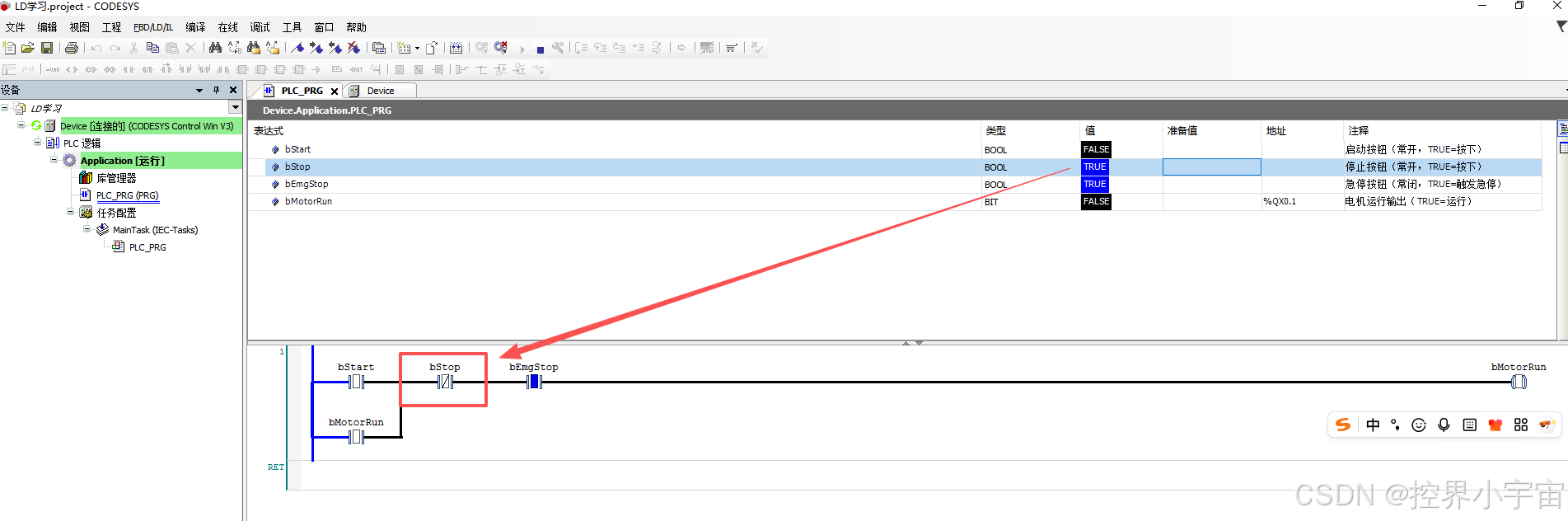
- 优先级控制:bEmgStop采用常闭触点,默认闭合,触发后直接断开能流,无需依赖其他逻辑,确保急停优先级最高。