main.c
cpp
#include "Ai8051U.h"
#include "Delay.h"
#include "Uart.h"
#include <stdint.h>
// ---- 自定义全局变量 ----
uint16_t count = 0; // 全局计数变量(未使用)
extern char wptr;
extern char rptr;
extern char buf[16];
extern __bit busy;
extern void UartIsr(void) __interrupt(8);
// ----------------------
void main(void)
{
CKCON = 0;
P0M0 = 0x00; P0M1 = 0x00; // 设置P0为准双向口
P1M0 = 0x00; P1M1 = 0x00; // 设置P1为准双向口
P2M0 = 0x00; P2M1 = 0x00; // 设置P2为准双向口
P3M0 = 0x00; P3M1 = 0x00; // 设置P3为准双向口
P4M0 = 0x00; P4M1 = 0x00; // 设置P4为准双向口
P5M0 = 0x00; P5M1 = 0x00; // 设置P5为准双向口
Uart_Init(115200UL); // 初始化UART,波特率115200
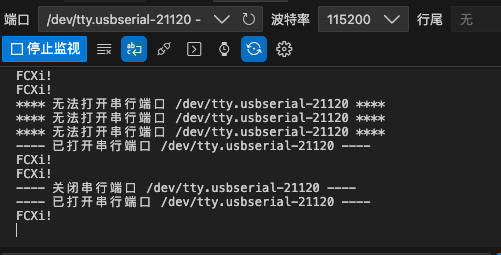
UartSendString("FCXi!\n");
while (1)
{
if(rptr != wptr)
{
UartSend(buf[rptr++]);
rptr &= 0x0F;
UartSendString("\r\n");
}
// UartSendString("KCXi!\r\n");
// delay_ms(1000);
}
}Uart.c
cpp
#include "Uart.h"
__bit busy;
char wptr;
char rptr;
char buf[16];
// 定时器2 串口2
// 默认管脚 P12(RxD) P13(TxD)
void Uart_Init(uint32_t baudrate)
{
EA = 0; // 关闭总中断
P_SW2 |= EAXFR; // 使能扩展寄存器访问
AUXR |= T2x12; // 定时器2为1T模式
S2CON = 0x50;
T2L = (65536 - (FOSC / baudrate + 2) / 4) & 0xFF;
T2H = (65536 - (FOSC / baudrate + 2) / 4) >> 8;
AUXR |= T2R; // 启动定时器2
wptr = 0;
rptr = 0;
busy = 0;
// 管脚配置
// P_SW2 |= S2_S; // 选择为P42(RxD) P43(TxD)
P_SW2 &= ~S2_S; // 选择为P12(RxD) P13(TxD). --- 默认配置(不写也可) ---
// 明确使能串口2中断(关键:补充中断使能)
IE2 |= 0x01; // 使能串口2中断(根据芯片手册确认位定义)
EA = 1; // 开启总中断
}
void UartIsr(void) __interrupt(8)
{
if (S2CON & S2TI)
{
// S2TI = 0;
S2CON &= ~S2TI; // 取值 0x02->1111_1101
busy = 0;
}
if (S2CON & S2RI)
{
S2CON &= ~S2RI; // 取值 0x01->1111_1110
char recv_char = S2BUF;
// 缓冲区保护:只有wptr和rptr不同时,才写入(避免覆盖未读数据)
char next_wptr = (wptr + 1) & 0x0F;
if (next_wptr != rptr)
{
buf[wptr] = recv_char;
wptr = next_wptr;
}
}
}
void UartSend(char c)
{
while (busy)
;
busy = 1;
S2BUF = c;
}
void UartSendString(char *str)
{
while (*str)
{
UartSend(*str++);
}
}效果!
注意事项!
中断函数在外部文件写后需要在 main函数主文件中 继承函数名!
1,extern void 中断函数名(void)__interrupt(x);
2,或者在响应头文件声明!