1. LingBot-Depth算法的输入、输出和核心使用场景。总结:
1.1 算法输入
LingBot-Depth模型的输入非常灵活,主要支持以下两种模式:
- RGB-D图像对:这是其最核心的输入模式。即来自标准消费级深度相机(如Intel RealSense, Orbbec Gemini)的RGB彩色图像和与之对齐的、可能包含大量数据缺失("黑洞")和噪声的原始深度图。
- 单张RGB图像:在仅有彩色图像的情况下,模型也能工作,此时它执行的是单目深度估计任务,仅根据视觉信息推断场景的几何结构。
1.2 算法输出
模型的输出是经过处理和增强的高精度、稠密深度图。
• 对于RGB-D输入:模型的主要功能是深度补全和优化。它会修复原始深度图中因透明、反光、弱纹理等原因造成的缺失区域,并抑制整体深度图的噪声,输出一张完整、清晰、时空一致的深度图。
• 对于RGB输入:模型直接输出一张从零生成的、具备真实尺度的估计深度图。
1.3 主要使用场景
LingBot-Depth的核心目标是解决具身智能机器人在复杂真实环境中的3D空间感知难题,具体应用场景包括:
-
机器人精准操作(核心场景):
◦ 透明物体抓取:让机器人能够"看清"并成功抓取玻璃杯、透明储物盒等传统深度相机无法感知的物体。
◦ 反光表面处理:在金属器皿、镜面等强反光场景下,提供可靠的深度信息。
◦ 极端光照环境:在强光过曝或暗光条件下,依然能生成有效的深度感知。
-
增强立体视觉系统:
◦ 可以作为先验知识集成到其他立体匹配模型中(如FoundationStereo),显著提升其收敛速度和最终精度。
-
高层视觉任务:
◦ 文档中提到,其生成的优质深度信息还能有益于相机位姿估计和4D点跟踪等任务,为系统提供稳定、连续的空间理解基础。
1.4 核心优势总结
• 算法创新:采用"掩码深度建模"范式,将硬件缺陷转化为学习信号,而非简单剔除。
• 硬件普惠:不依赖昂贵的新型传感器,直接提升现有消费级RGB-D相机的性能,易于落地。
• 一专多能:同一模型支持深度补全、单目深度估计、立体匹配增强等多种任务,具备通用的空间理解能力。
• 强鲁棒性:在透明、反光、极端光照等挑战性场景下表现卓越。
简而言之,LingBot-Depth是一个旨在为机器人装上"增强版眼睛"的空间感知基础模型,其输入是普通的图像或图像-深度对,输出是高质量的深度图,主要应用于解决机器人在实际世界中因物体材质和光照条件导致的感知失灵问题。
三、深度图+视觉模型的"重大突破"就在今天,蚂蚁灵波提出了LingBot-Depth,给Depth这把"尺子",上了更精细的"刻度"。
2. 论文标题:Masked Depth Modeling for Spatial
Perception
开源链接:https://github.com/robbyant/lingbot-depth
项目主页:https://technology.robbyant.com/lingbot-depth
blog小结


3. 快速总结
文章详细介绍了蚂蚁集团旗下灵波科技(Robby AI)推出的开源空间感知模型 LingBot-Depth,该模型旨在解决具身智能机器人在复杂真实场景中的3D空间感知难题。
核心问题:
纯视觉(VLA)和传统RGB-D深度相机在透明物体(如玻璃杯)、反光表面(如金属器皿)和极端光照(强光、暗光)条件下会出现感知失效,导致机器人无法准确判断物体的空间位置和轮廓,从而影响其操作能力。
LingBot-Depth 的解决方案与创新:
-
核心创新 - 掩码深度建模(Masked Depth Modeling, MDM):
◦ 不将深度相机在复杂场景下产生的数据缺失视为噪声,而是将其当作一种"自然掩码"。
◦ 通过海量RGB-D数据对进行训练,让模型学习根据RGB图像的上下文信息来预测和补全缺失或错误的深度值,建立"外观-几何"的对应关系。
-
大规模高质量数据集:
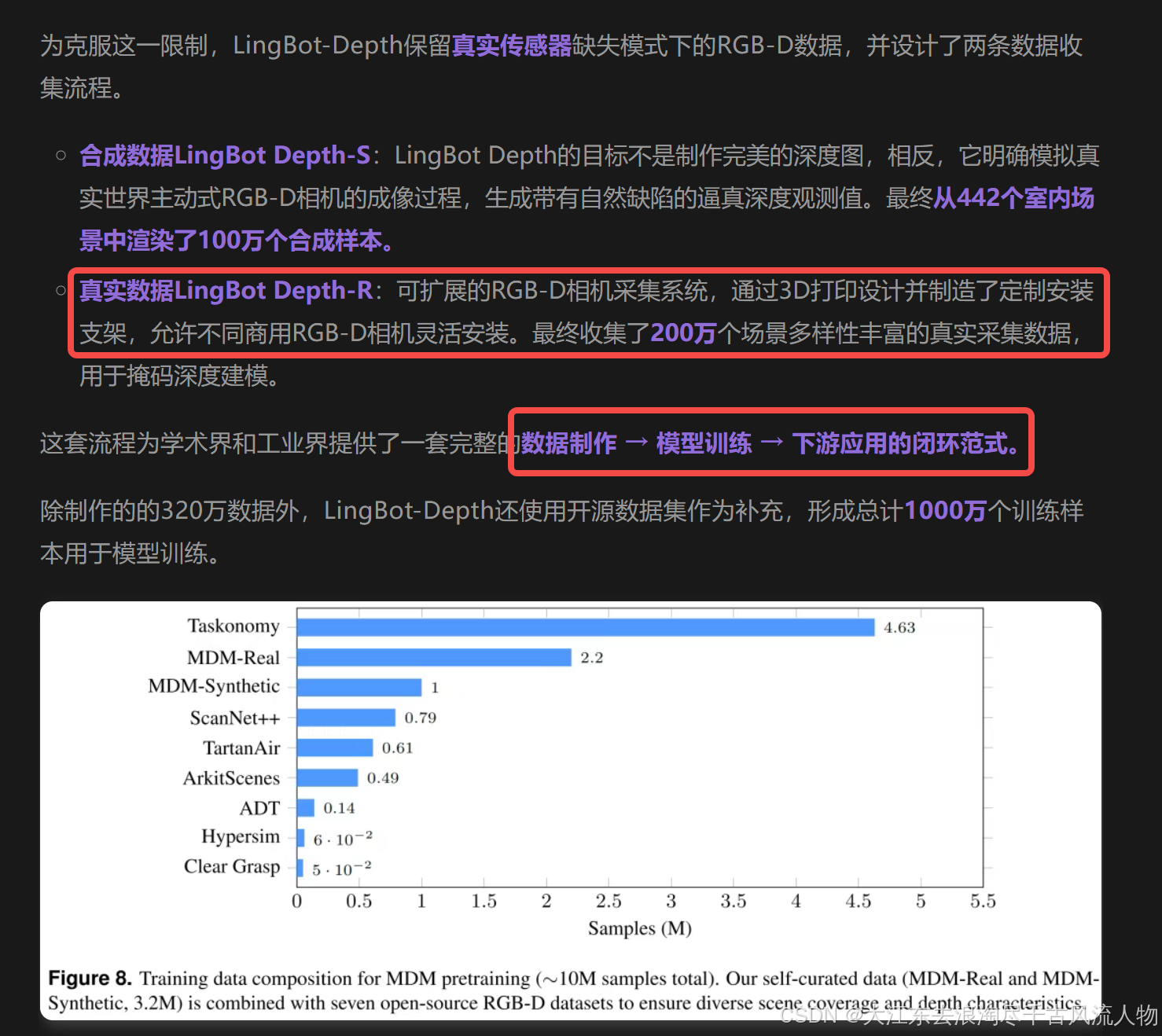
◦ 构建了总计约1000万样本的训练数据集,包括:
▪ LingBot Depth-S(合成数据): 100万样本,模拟真实传感器成像缺陷。 ▪ LingBot Depth-R(真实数据): 200万样本,通过定制采集系统获取。 ▪ 补充开源数据集。◦ 数据覆盖多样化的真实场景(室内、室外、不同光照和物体材质)。
-
多功能与高性能表现:
◦ 深度补全: 在透明、反光等极端条件下,性能显著优于主流方案(如OMNI-DC, PromptDA),RMSE(均方根误差)降低超过40%。
◦ 单目深度估计: 仅输入RGB图像即可输出高精度深度图,在多个数据集上超越基于DINOv2的基线模型。
◦ 立体匹配增强: 可作为先验知识提升其他立体匹配模型的性能(收敛速度提升3倍,误差降低20%)。
◦ 卓越的鲁棒性: 在透明物体、强光、暗光、低纹理等挑战性场景下,都能生成准确、时空一致的深度信息。
-
易于落地应用:
◦ 硬件兼容性好: 支持Intel RealSense、Orbbec Gemini等主流消费级RGB-D相机,无需更换硬件。
◦ 轻量化部署: 满足实时性要求(30 FPS),可无缝集成到现有机器人系统中。
◦ 效果验证: 在机器人抓取任务中,能显著提升对透明物体等难例的抓取成功率。
总结:
LingBot-Depth 通过算法创新弥补了硬件在复杂感知场景下的局限性,为具身智能机器人提供了更精确、更鲁棒的"眼睛"。它采用MDM范式,利用大规模数据训练,实现了从深度补全到单目估计等多任务的卓越性能,并具备易于部署的优点,标志着在解决机器人现实世界空间感知挑战方面迈出了重要一步。文章指出,这仅仅是开始,期待未来在具身智能领域看到更多进展。