角点检测:Harris 与 Shi-Tomasi原理拆解【计算机视觉】
- [角点检测(Corner Detection)](#角点检测(Corner Detection))
-
- Ⅰ、引言
- [Ⅱ、Harris 角点检测](#Ⅱ、Harris 角点检测)
-
- [一、Harris 角点检测的本质](#一、Harris 角点检测的本质)
- [二、Harris 角点检测算法数学原理](#二、Harris 角点检测算法数学原理)
-
- [1. 定义窗口移动的灰度变化函数](#1. 定义窗口移动的灰度变化函数)
- [2. 数学简化:一阶泰勒展开与二次型转化](#2. 数学简化:一阶泰勒展开与二次型转化)
- [3. 结构矩阵: M M M的性质与意义](#3. 结构矩阵: M M M的性质与意义)
- [4. 判断依据:Harris 响应值 R R R 构造](#4. 判断依据:Harris 响应值 R R R 构造)
- [5. 核心判断:由 R R R 区分区域类型](#5. 核心判断:由 R R R 区分区域类型)
- [6. 数学流程](#6. 数学流程)
- [Ⅲ、Shi-Tomasi 角点检测](#Ⅲ、Shi-Tomasi 角点检测)
-
- [一、Shi-Tomasi是对 Harris 角点理论的简化与改进](#一、Shi-Tomasi是对 Harris 角点理论的简化与改进)
- 二、Shi-Tomasi的数学原理
-
- 1.核心思想
- [2. 数学定义](#2. 数学定义)
- [3. 区域分类直观解释](#3. 区域分类直观解释)
- [4. 与 Harris 角点的对比总结](#4. 与 Harris 角点的对比总结)
- [5. 工程实现说明](#5. 工程实现说明)
- Ⅳ、代码对比不同角点检测的结果
- Ⅴ、角点检测算法在图像拼接的应用
- Ⅵ、总结
角点检测(Corner Detection)
角点是图像中各方向灰度变化显著的关键特征点,角点检测即通过算法自动提取这类可支撑后续视觉任务的核心锚点。
注意:本文所有代码均可导入 Jupyter Notebook 直接运行
Ⅰ、引言
在计算机视觉的世界里,我们常常需要让机器像人类一样 "看懂" 图像内容 ------ 而要实现这一点,第一步往往不是直接识别完整的物体,而是先抓住图像中那些 "关键的锚点"。
想象一下,当你观察一张桌子的照片时,你的目光会不自觉地先落在桌子的四个拐角;当你看一幅建筑蓝图时,墙体的交接处、窗户的边角会最先吸引你的注意力。这些在图像中具有明显特征、能够代表局部结构信息的点,就是我们今天要探讨的核心 ------ 角点(Corner)。
角点的独特之处在于,它在各个方向上的灰度变化都非常显著,既不像平坦区域那样灰度趋于一致,也不像边缘那样只在单一方向上有明显变化。而角点检测(Corner Detection),就是通过算法自动从图像中提取这些关键锚点的过程。
Ⅱ、Harris 角点检测
一、Harris 角点检测的本质
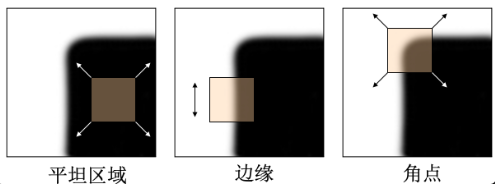
通过计算图像中某个像素点周围区域,在不同方向上移动后的灰度变化程度,来判断该点是否为角点。
- 若某个点向任意方向移动,灰度都发生剧烈变化 → 这是角点
- 若某个点只在一个方向上移动有灰度变化,其他方向无 → 这是边缘
- 若某个点向任意方向移动,灰度都几乎无变化 → 这是平坦区域
二、Harris 角点检测算法数学原理
以下公式涵盖 Harris 角点检测的全流程,从图像预处理到最终角点提取,所有核心数学推导与计算步骤均完整呈现。
- 输入:彩色/灰度图像 (I(x,y))
- 输出:图像中的有效角点集合
- 核心参数:高斯窗口大小、经验常数 (k)、响应值阈值 (T)
1. 定义窗口移动的灰度变化函数
以任意像素为中心取邻域窗口 W W W,定义窗口沿 ( Δ x , Δ y ) (\Delta x, \Delta y) (Δx,Δy) 移动后,窗口内的总灰度变化量为:
E ( Δ x , Δ y ) = ∑ ( u , v ) ∈ W w ( u , v ) ⋅ I ( u + Δ x , v + Δ y ) − I ( u , v ) 2 E(\Delta x, \Delta y) = \sum_{(u,v) \in W} w(u,v) \cdot I(u+\\Delta x, v+\\Delta y) - I(u,v)^2 E(Δx,Δy)=(u,v)∈W∑w(u,v)⋅I(u+Δx,v+Δy)−I(u,v)2
核心符号说明
- E ( Δ x , Δ y ) E(\Delta x, \Delta y) E(Δx,Δy):窗口移动后的总灰度变化值
- w ( u , v ) w(u,v) w(u,v):高斯加权函数(赋予窗口中心像素更高权重,提升原理的鲁棒性)
- I ( u , v ) I(u,v) I(u,v):像素 ( u , v ) (u,v) (u,v) 的灰度值
- W W W:像素邻域窗口(原理层面不限制大小)
高斯加权函数 w ( u , v ) w(u,v) w(u,v) 完整定义
w ( u , v ) w(u,v) w(u,v) 是以当前像素 ( x , y ) (x,y) (x,y) 为中心的二维高斯加权函数 ,用于对邻域梯度进行平滑加权,提升角点检测的抗噪性与稳定性,其数学表达式为:
w ( u , v ) = 1 2 π σ 2 exp ( − ( u − x ) 2 + ( v − y ) 2 2 σ 2 ) w(u,v) = \frac{1}{2\pi\sigma^2} \exp\left(-\frac{(u-x)^2 + (v-y)^2}{2\sigma^2}\right) w(u,v)=2πσ21exp(−2σ2(u−x)2+(v−y)2)其中:
- ( x , y ) (x,y) (x,y) 为当前计算Harris响应的中心像素
- ( u , v ) (u,v) (u,v) 为局部窗口内任意像素
- σ \sigma σ 为高斯核标准差,控制加权衰减速度
- 距离中心越近, w ( u , v ) w(u,v) w(u,v) 越大;距离越远, w ( u , v ) w(u,v) w(u,v) 越小
该权重会代入结构矩阵完成邻域梯度的加权求和:
M = ∑ ( u , v ) ∈ W w ( u , v ) I x 2 I x I y I x I y I y 2 M = \sum_{(u,v)\in W} w(u,v) \begin{bmatrix} I_x^2 & I_xI_y \\ I_xI_y & I_y^2 \end{bmatrix} M=(u,v)∈W∑w(u,v)Ix2IxIyIxIyIy2
2. 数学简化:一阶泰勒展开与二次型转化
直接计算上述函数复杂度较高,通过二元函数一阶泰勒展开 忽略高阶无穷小,在点 ( u , v ) (u,v) (u,v) 处对灰度函数做近似:
I ( u + Δ x , v + Δ y ) ≈ I ( u , v ) + I x ( u , v ) Δ x + I y ( u , v ) Δ y I(u+\Delta x, v+\Delta y) \approx I(u,v) + I_x(u,v)\Delta x + I_y(u,v)\Delta y I(u+Δx,v+Δy)≈I(u,v)+Ix(u,v)Δx+Iy(u,v)Δy
其中, I x ( u , v ) = ∂ I ∂ x ( u , v ) I_x(u,v) = \frac{\partial I}{\partial x}(u,v) Ix(u,v)=∂x∂I(u,v)、 I y ( u , v ) = ∂ I ∂ y ( u , v ) I_y(u,v) = \frac{\partial I}{\partial y}(u,v) Iy(u,v)=∂y∂I(u,v) 为图像在像素 ( u , v ) (u,v) (u,v) 处的水平、垂直灰度梯度,描述该点灰度沿对应方向的变化率。
此处使用一阶泰勒展开的核心原因:
图像灰度函数 I ( u , v ) I(u,v) I(u,v)是离散像素构成的非线性函数,无显式解析表达式,无法直接对其进行极值分析、矩阵化推导(后续二次型、结构矩阵 M M M的构建)。
而角点检测仅关注窗口局部微小偏移 ( Δ x , Δ y ) (\Delta x,\Delta y) (Δx,Δy),在微小增量前提下,泰勒展开可将非线性的灰度偏移项 I ( u + Δ x , v + Δ y ) I(u+\Delta x,v+\Delta y) I(u+Δx,v+Δy),近似为仅含当前点灰度和可计算梯度 I x 、 I y I_x、I_y Ix、Iy的线性式,既简化计算,又能衔接后续二次型、特征值的理论分析,是Harris角点检测数学建模的关键近似步骤。
将上式代入灰度变化函数,先得到灰度差:
I ( u + Δ x , v + Δ y ) − I ( u , v ) ≈ I x ( u , v ) Δ x + I y ( u , v ) Δ y I(u+\Delta x,v+\Delta y)-I(u,v) \,\approx\, I_x(u,v)\Delta x + I_y(u,v)\Delta y I(u+Δx,v+Δy)−I(u,v)≈Ix(u,v)Δx+Iy(u,v)Δy
代入 E ( Δ x , Δ y ) E(\Delta x,\Delta y) E(Δx,Δy) 的定义:
E ( Δ x , Δ y ) ≈ ∑ ( u , v ) ∈ W w ( u , v ) ⋅ I x ( u , v ) Δ x + I y ( u , v ) Δ y 2 E(\Delta x, \Delta y) \,\approx\, \sum_{(u,v)\in W} w(u,v) \cdot\bigI_x(u,v)\\Delta x + I_y(u,v)\\Delta y\\big^2 E(Δx,Δy)≈(u,v)∈W∑w(u,v)⋅Ix(u,v)Δx+Iy(u,v)Δy2
将平方项完全展开:
( I x ( u , v ) Δ x + I y ( u , v ) Δ y ) 2 = I x ( u , v ) 2 Δ x 2 + 2 I x ( u , v ) I y ( u , v ) Δ x Δ y + I y ( u , v ) 2 Δ y 2 \big(I_x(u,v)\Delta x + I_y(u,v)\Delta y\big)^2 = I_x(u,v)^2\Delta x^2 + 2I_x(u,v)I_y(u,v)\Delta x\Delta y + I_y(u,v)^2\Delta y^2 (Ix(u,v)Δx+Iy(u,v)Δy)2=Ix(u,v)2Δx2+2Ix(u,v)Iy(u,v)ΔxΔy+Iy(u,v)2Δy2
由于 Δ x , Δ y \Delta x,\Delta y Δx,Δy 是窗口整体偏移量,与窗口内像素位置 ( u , v ) (u,v) (u,v) 无关,可将其提出求和符号,并定义窗口内加权梯度累加量:
A = ∑ ( u , v ) ∈ W w ( u , v ) I x ( u , v ) 2 , B = ∑ ( u , v ) ∈ W w ( u , v ) I y ( u , v ) 2 , C = ∑ ( u , v ) ∈ W w ( u , v ) I x ( u , v ) I y ( u , v ) A = \sum_{(u,v)\in W} w(u,v)\,I_x(u,v)^2,\quad B = \sum_{(u,v)\in W} w(u,v)\,I_y(u,v)^2,\quad C = \sum_{(u,v)\in W} w(u,v)\,I_x(u,v)I_y(u,v) A=(u,v)∈W∑w(u,v)Ix(u,v)2,B=(u,v)∈W∑w(u,v)Iy(u,v)2,C=(u,v)∈W∑w(u,v)Ix(u,v)Iy(u,v)
此时 E E E 可表示为二次多项式:
E ( Δ x , Δ y ) ≈ A Δ x 2 + 2 C Δ x Δ y + B Δ y 2 E(\Delta x, \Delta y) \,\approx\, A\Delta x^2 + 2C\Delta x\Delta y + B\Delta y^2 E(Δx,Δy)≈AΔx2+2CΔxΔy+BΔy2
上式为标准二元二次型,可写成矩阵乘法形式,从而得到原理核心简化结果 :
Δ x Δ y A C C B Δ x Δ y = A Δ x 2 + 2 C Δ x Δ y + B Δ y 2 \begin{bmatrix} \Delta x & \Delta y \end{bmatrix} \begin{bmatrix} A & C \\ C & B \end{bmatrix} \begin{bmatrix} \Delta x \\ \Delta y \end{bmatrix} = A\Delta x^2 + 2C\Delta x\Delta y + B\Delta y^2 ΔxΔyACCBΔxΔy=AΔx2+2CΔxΔy+BΔy2
E ( Δ x , Δ y ) ≈ Δ x Δ y ⋅ M ⋅ Δ x Δ y E(\Delta x, \Delta y) \approx \begin{bmatrix} \Delta x & \Delta y \end{bmatrix} \cdot M \cdot \begin{bmatrix} \Delta x \\ \Delta y \end{bmatrix} E(Δx,Δy)≈ΔxΔy⋅M⋅ΔxΔy
其中 Harris 结构矩阵为:
M = A C C B = ∑ ( u , v ) ∈ W w ( u , v ) I x ( u , v ) 2 I x ( u , v ) I y ( u , v ) I x ( u , v ) I y ( u , v ) I y ( u , v ) 2 M=\begin{bmatrix}A&C\\C&B\end{bmatrix} =\sum_{(u,v)\in W}w(u,v) \begin{bmatrix} I_x(u,v)^2&I_x(u,v)I_y(u,v)\\ I_x(u,v)I_y(u,v)&I_y(u,v)^2 \end{bmatrix} M=ACCB=(u,v)∈W∑w(u,v)Ix(u,v)2Ix(u,v)Iy(u,v)Ix(u,v)Iy(u,v)Iy(u,v)2
3. 结构矩阵: M M M的性质与意义
多项式只能算出单个偏移下的变化数值,矩阵才能揭示变化的几何结构,而角点判定依赖的正是这种结构,而非单个数值。
在上文二次型化简中,我们已经得到 Harris 结构矩阵:
M = ∑ ( u , v ) ∈ W w ( u , v ) I x ( u , v ) 2 I x ( u , v ) I y ( u , v ) I x ( u , v ) I y ( u , v ) I y ( u , v ) 2 = A C C B M = \sum_{(u,v) \in W} w(u,v) \begin{bmatrix} I_x(u,v)^2 & I_x(u,v)I_y(u,v) \\ I_x(u,v)I_y(u,v) & I_y(u,v)^2 \end{bmatrix} = \begin{bmatrix} A & C \\ C & B \end{bmatrix} M=(u,v)∈W∑w(u,v)Ix(u,v)2Ix(u,v)Iy(u,v)Ix(u,v)Iy(u,v)Iy(u,v)2=ACCB
其中 (A,B,C) 为窗口内梯度的加权累加量。
M M M 的核心性质:
- M M M是 ( 2 × 2 ) (2 \times 2) (2×2) 对称半正定矩阵,特征值 ( λ 1 , λ 2 ) (\lambda_1,\lambda_2) (λ1,λ2) 均为非负实数
- M M M用于描述当前像素邻域内的灰度梯度分布,特征值大小对应不同方向上的灰度变化强度
4. 判断依据:Harris 响应值 R R R 构造
在前面的推导中,我们已经将灰度变化能量函数 E ( Δ x , Δ y ) E(\Delta x,\Delta y) E(Δx,Δy)转化为关于位移向量的二次型,其局部变化特性完全由结构矩阵 M M M的两个特征值 λ 1 , λ 2 \lambda_1,\lambda_2 λ1,λ2决定。理论上可以通过逐点计算特征值并判断大小,区分平坦区域、边缘与角点,但直接对每个像素位置求解 2 × 2 2\times2 2×2矩阵的特征值,会带来额外的开方、特征分解运算,在图像逐像素遍历场景下计算开销偏大。
因此在工程与理论实现中,不直接显式求解 λ 1 , λ 2 \lambda_1,\lambda_2 λ1,λ2,而是利用对称矩阵的基本代数性质,使用矩阵的行列式 与迹 这两个可快速计算的标量量,构造统一的角点响应函数 R R R,实现对像素类型的快速判别。
矩阵关键统计量与特征值的关系
结构矩阵 M = A C C B M=\begin{bmatrix}A&C\\C&B\end{bmatrix} M=ACCB是实对称半正定矩阵,拥有两个非负实数特征值 λ 1 , λ 2 \lambda_1,\lambda_2 λ1,λ2,满足对称矩阵的核心恒等关系:
- 行列式 :矩阵所有特征值的乘积,计算公式与特征值关系为
det ( M ) = A B − C 2 = λ 1 λ 2 \det(M) = AB - C^2 = \lambda_1 \lambda_2 det(M)=AB−C2=λ1λ2
物理含义:用于量化两个特征值的整体乘积大小,反映灰度变化在两个正交主方向上的联合强度。 - 迹 :矩阵主对角线元素之和,等于所有特征值的和,计算公式与特征值关系为
tr ( M ) = A + B = λ 1 + λ 2 \text{tr}(M) = A + B = \lambda_1 + \lambda_2 tr(M)=A+B=λ1+λ2
物理含义:用于量化两个特征值的整体总和大小,反映灰度变化在两个主方向上的总强度。
利用这两个恒等式,无需执行特征分解,仅通过矩阵元素的四则运算即可完成与特征值强相关的数值计算。
Harris 响应值公式与设计思想
结合行列式与迹,定义Harris角点响应值 R R R:
R = det ( M ) − k ⋅ tr ( M ) 2 R = \det(M) - k \cdot \left\\text{tr}(M)\\right^2 R=det(M)−k⋅tr(M)2
代入特征值表达,可得到等价形式:
R = λ 1 λ 2 − k ( λ 1 + λ 2 ) 2 R = \lambda_1\lambda_2 - k(\lambda_1+\lambda_2)^2 R=λ1λ2−k(λ1+λ2)2
各组成部分与参数的详细含义:
- det ( M ) = λ 1 λ 2 \det(M)=\lambda_1\lambda_2 det(M)=λ1λ2:当两个方向灰度变化都显著时,该项取值较大;若存在一个方向变化极小(边缘),该项会快速减小;平坦区域则趋近于0。
- tr ( M ) = λ 1 + λ 2 \text{tr}(M)=\lambda_1+\lambda_2 tr(M)=λ1+λ2:对单一方向大变化(边缘)和两个方向都大变化(角点)都会有较大响应,需要通过系数与平方项进行抑制。
- k k k:经验调节常数,由实验确定,通用取值范围为 0.04 ∼ 0.06 0.04 \sim 0.06 0.04∼0.06 ,作用是平衡行列式与迹的贡献,避免边缘区域被误判为角点。 k k k过大会降低角点灵敏度, k k k过小则边缘抑制效果变差。
- R R R:逐像素计算得到的标量响应值,用于统一量化该像素位置为角点的置信程度,是后续阈值筛选的直接依据。
5. 核心判断:由 R R R 区分区域类型
基于响应值 R R R的区域分类规则
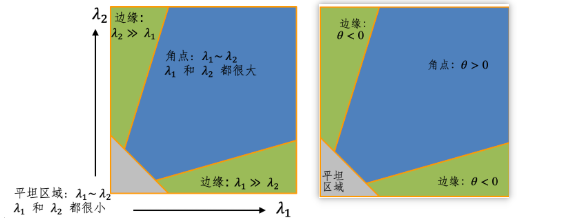
结合 λ 1 , λ 2 \lambda_1,\lambda_2 λ1,λ2的物理意义与 R R R的表达式,可以直接通过 R R R的符号与幅值完成三类区域的判别:
-
角点
λ 1 \lambda_1 λ1与 λ 2 \lambda_2 λ2均较大且数值接近 ,使得 λ 1 λ 2 \lambda_1\lambda_2 λ1λ2远大于 k ( λ 1 + λ 2 ) 2 k(\lambda_1+\lambda_2)^2 k(λ1+λ2)2,满足:
R ≫ 0 R \gg 0 R≫0代表两个正交方向灰度均发生剧烈变化,符合角点定义。
-
边缘
一个特征值很大 ,另一个特征值近似为0 ,代入后 λ 1 λ 2 \lambda_1\lambda_2 λ1λ2项很小,整体满足:
R ≪ 0 R \ll 0 R≪0代表仅单一方向存在明显灰度变化,对应图像边缘。
-
平坦区域
λ 1 \lambda_1 λ1与 λ 2 \lambda_2 λ2均接近于0 ,两项都很小,最终:
R ≈ 0 R \approx 0 R≈0代表任意方向灰度变化均极微弱,为纹理平坦区域。
6. 数学流程
E ( Δ x , Δ y ) → 泰勒展开 二次型 → M → R → 阈值判断 角点 E(\Delta x,\Delta y) \xrightarrow{\text{泰勒展开}} \text{二次型} \xrightarrow{} M \xrightarrow{} R \xrightarrow{\text{阈值判断}} \text{角点} E(Δx,Δy)泰勒展开 二次型 M R阈值判断 角点
Ⅲ、Shi-Tomasi 角点检测
一、Shi-Tomasi是对 Harris 角点理论的简化与改进
Harris 角点通过构造响应值 R = det ( M ) − k ⋅ t r ( M ) 2 R=\det(M)-k\cdot\mathrm{tr}(M)^2 R=det(M)−k⋅tr(M)2 实现角点判定,但存在一个明显不足: R R R 对经验参数 k k k 敏感,不同图像、不同纹理需要微调 k k k 才能获得稳定结果;且 R R R 是 λ 1 , λ 2 \lambda_1,\lambda_2 λ1,λ2 的组合式,物理直观性较弱。
Shi-Tomasi 方法直接从二次型极值的物理意义 出发,跳过人工构造 R R R 的环节,使用更直接、更稳定的判定准则,是对 Harris 角点理论的简化与改进,也是视觉跟踪、稀疏重建中更常用的角点提取方式。
二、Shi-Tomasi的数学原理
1.核心思想
在之前推导中已经得到:
在单位位移向量约束 Δ x 2 + Δ y 2 ≈ 1 \Delta x^2+\Delta y^2\approx 1 Δx2+Δy2≈1 下,二次型能量函数
E ( Δ x , Δ y ) = Δ x Δ y M Δ x Δ y E(\Delta x,\Delta y) = \begin{bmatrix}\Delta x & \Delta y\end{bmatrix} M \begin{bmatrix}\Delta x \\ \Delta y\end{bmatrix} E(Δx,Δy)=ΔxΔyMΔxΔy
的极值由结构矩阵 M M M 的特征值 λ 1 , λ 2 \lambda_1,\lambda_2 λ1,λ2 直接决定:
min ∣ ∣ ( Δ x , Δ y ) ∣ ∣ = 1 E = min ( λ 1 , λ 2 ) , max ∣ ∣ ( Δ x , Δ y ) ∣ ∣ = 1 E = max ( λ 1 , λ 2 ) \min_{||(\Delta x,\Delta y)||=1} E = \min(\lambda_1,\lambda_2),\quad \max_{||(\Delta x,\Delta y)||=1} E = \max(\lambda_1,\lambda_2) ∣∣(Δx,Δy)∣∣=1minE=min(λ1,λ2),∣∣(Δx,Δy)∣∣=1maxE=max(λ1,λ2)
角点的本质要求是:所有方向上灰度变化都足够大 ,即变化最小的那个方向,变化量也不能小。
因此最直观的判定条件是:
min ( λ 1 , λ 2 ) > T \min(\lambda_1,\lambda_2) > T min(λ1,λ2)>T
其中 T T T 为人工设定的响应阈值。这就是 Shi-Tomasi 的核心判据。
2. 数学定义
设结构矩阵 M M M 的两个非负实特征值满足 λ 1 ≥ λ 2 ≥ 0 \lambda_1\ge\lambda_2\ge 0 λ1≥λ2≥0,定义 Shi-Tomasi 角点响应为较小特征值本身:
R Shi-Tomasi = min ( λ 1 , λ 2 ) R_{\text{Shi-Tomasi}} = \min(\lambda_1,\lambda_2) RShi-Tomasi=min(λ1,λ2)
判定规则:
- 若 R Shi-Tomasi > T R_{\text{Shi-Tomasi}} > T RShi-Tomasi>T:判定为角点
- 若 R Shi-Tomasi ≤ T R_{\text{Shi-Tomasi}} \le T RShi-Tomasi≤T:判定为非角点(边缘或平坦区域)
与 Harris 对比:
- Harris:依赖人工设计 R = λ 1 λ 2 − k ( λ 1 + λ 2 ) 2 R=\lambda_1\lambda_2 - k(\lambda_1+\lambda_2)^2 R=λ1λ2−k(λ1+λ2)2,引入超参 k k k
- Shi-Tomasi:直接使用 min ( λ 1 , λ 2 ) \min(\lambda_1,\lambda_2) min(λ1,λ2),无额外经验系数,物理意义清晰
3. 区域分类直观解释
对图像不同区域,特征值满足不同关系,对应 Shi-Tomasi 响应不同:
-
平坦区域
λ 1 ≈ 0 , λ 2 ≈ 0 ⟹ min ( λ 1 , λ 2 ) ≈ 0 \lambda_1\approx 0,\;\lambda_2\approx 0 \implies \min(\lambda_1,\lambda_2)\approx 0 λ1≈0,λ2≈0⟹min(λ1,λ2)≈0,不满足阈值,被剔除。 -
边缘区域
一个特征值大,一个特征值接近 0,例如 λ 1 ≫ 0 , λ 2 ≈ 0 \lambda_1 \gg 0,\;\lambda_2\approx 0 λ1≫0,λ2≈0
⟹ min ( λ 1 , λ 2 ) ≈ 0 \implies \min(\lambda_1,\lambda_2)\approx 0 ⟹min(λ1,λ2)≈0,不满足阈值,被剔除。 -
角点区域
λ 1 , λ 2 \lambda_1,\lambda_2 λ1,λ2 均显著大于 0
⟹ min ( λ 1 , λ 2 ) > T \implies \min(\lambda_1,\lambda_2) > T ⟹min(λ1,λ2)>T,被保留为角点。
可以看到:Shi-Tomasi 天然具备区分边缘与角点 的能力,且不需要额外系数 k k k。
4. 与 Harris 角点的对比总结
| 对比项 | Harris 角点 | Shi-Tomasi(Good Features to Track) |
|---|---|---|
| 响应函数 | R = det ( M ) − k ⋅ t r ( M ) 2 R=\det(M)-k\cdot\mathrm{tr}(M)^2 R=det(M)−k⋅tr(M)2 | R = min ( λ 1 , λ 2 ) R=\min(\lambda_1,\lambda_2) R=min(λ1,λ2) |
| 经验参数 | 有 k k k,通常取 0.04 ∼ 0.06 0.04\sim 0.06 0.04∼0.06 | 无额外经验参数,仅保留阈值 T T T |
| 物理直观性 | 间接,由特征值组合构造 | 直接对应最小变化方向的能量大小,意义明确 |
| 稳定性 | 对 k k k 敏感,不同图像需要调参 | 对纹理、图像变化更稳定 |
| 典型用途 | 通用角点检测 | 光流跟踪、稀疏SLAM、特征匹配、KLT跟踪中首选 |
5. 工程实现说明
虽然形式上需要计算特征值,但 2 × 2 2\times2 2×2 实对称矩阵的特征值存在闭式解:
λ 1 , 2 = t r ( M ) 2 ± ( t r ( M ) 2 ) 2 − det ( M ) \lambda_{1,2} = \frac{\mathrm{tr}(M)}{2} \pm \sqrt{\left(\frac{\mathrm{tr}(M)}{2}\right)^2 - \det(M)} λ1,2=2tr(M)±(2tr(M))2−det(M)
仍然可以只用 A , B , C A,B,C A,B,C(即 t r ( M ) = A + B , det ( M ) = A B − C 2 \mathrm{tr}(M)=A+B,\;\det(M)=AB-C^2 tr(M)=A+B,det(M)=AB−C2)快速算出两个特征值,再取较小者,不需要迭代算法,计算开销与 Harris 接近。
Ⅳ、代码对比不同角点检测的结果
一、代码实现
python
import cv2
import numpy as np
import matplotlib.pyplot as plt
def get_test_image():
img = cv2.imread("test2.jpg")
# 读取失败时,生成备用人工棋盘格图(防止程序报错)
if img is None:
print("提示:未找到,自动生成备用人工角点图")
img = np.ones((400, 400, 3), dtype=np.uint8) * 255
grid_step = 80
for i in range(0, 401, grid_step):
cv2.line(img, (i, 0), (i, 400), (0, 0, 0), 2)
cv2.line(img, (0, i), (400, i), (0, 0, 0), 2)
return img
# 获取统一测试图像
test_img = get_test_image()
# 转为灰度图(两种算法均需要灰度输入)
test_gray = cv2.cvtColor(test_img, cv2.COLOR_BGR2GRAY)- 这段代码定义了一个名为harris_corner_detect的封装函数,核心作用是调用 OpenCV 的 Harris 角点检测接口,完成从输入图像到标记红色角点结果图的全流程,同时返回算法生成的角点响应图。它隐藏了 Harris 检测的底层细节,只暴露关键可调参数,方便用户直接调用,且输出格式统一,便于后续和其他角点检测算法做对比。
python
def harris_corner_detect(img, gray, block_size=2, ksize=3, k=0.04, threshold=0.01):
# 转换为 32 位浮点型(Harris 要求输入格式)
gray_float = np.float32(gray)
# 调用 Harris 角点检测
harris_dst = cv2.cornerHarris(gray_float, blockSize=block_size, ksize=ksize, k=k)
# 膨胀结果(增强角点显示效果,非必需)
harris_dst = cv2.dilate(harris_dst, None)
# 复制原始图像用于绘制角点
img_harris = img.copy()
# 标记角点(红色:BGR 格式 (0, 0, 255))
img_harris[harris_dst > threshold * harris_dst.max()] = (0, 0, 255)
return img_harris, harris_dst- 函数内部先将灰度图转换为 32 位浮点型,满足cv2.cornerHarris的输入格式要求,随后调用该接口得到全图像素的角点响应图harris_dst,再通过膨胀操作优化角点的显示效果。接着复制原始彩色图像,避免修改原图,通过阈值筛选出高置信度的角点区域,将这些区域的像素设为 BGR 格式的红色,完成角点可视化标记,最后返回标记好的彩色结果图和原始响应图,既满足直观查看需求,也保留了原始数据供后续分析。
- 这段代码定义了一个名为shi_tomasi_corner_detect的封装函数,核心作用是调用 OpenCV 官方的cv2.goodFeaturesToTrack接口实现纯 Shi-Tomasi 角点检测,输出标记了绿色实心圆角点的彩色图像,同时返回检测到的角点坐标,格式统一且易用,方便与 Harris 角点检测结果做对比。
python
def shi_tomasi_corner_detect(img, gray, max_corners=150, quality_level=0.01, min_distance=10):
# 调用 Shi-Tomasi 角点检测(OpenCV 官方接口:goodFeaturesToTrack)
corners = cv2.goodFeaturesToTrack(
gray,
maxCorners=max_corners, # 最大检测角点数量
qualityLevel=quality_level, # 角点质量阈值(0~1,仅保留高于该值的角点)
minDistance=min_distance, # 角点之间的最小欧氏距离
useHarrisDetector=False # 禁用 Harris 检测,使用纯 Shi-Tomasi 算法
)
# 复制原始图像用于绘制角点
img_shi_tomasi = img.copy()
if corners is not None:
corners = np.int64(corners)
for corner in corners:
x, y = corner.ravel()
cv2.circle(img_shi_tomasi, (x, y), 4, (0, 255, 0), -1)
return img_shi_tomasi, corners- 函数内部先调用cv2.goodFeaturesToTrack,禁用 Harris 检测模式,传入灰度图和角点数量、质量阈值等关键参数,获取筛选后的角点坐标。接着复制原始彩色图像避免修改原图,判断角点坐标非空后,将其转换为兼容新版本 NumPy 的整数格式,再通过循环遍历每个角点,用cv2.circle绘制绿色实心圆完成标记,最后返回标记好的结果图和角点坐标,既满足直观查看需求,也保留了原始角点数据供后续处理。
- 执行两种算法统一参数
python
test_harris, _ = harris_corner_detect(test_img, test_gray)
test_shi_tomasi, _ = shi_tomasi_corner_detect(test_img, test_gray)可视化
python
plt.rcParams["figure.figsize"] = (16, 8)
plt.rcParams["font.sans-serif"] = ["SimHei"]
plt.rcParams["axes.unicode_minus"] = False
plt.subplot(1, 2, 1)
plt.imshow(cv2.cvtColor(test_harris, cv2.COLOR_BGR2RGB))
plt.title("test1.jpg - Harris 角点检测(红色标记)")
plt.axis("off")
plt.subplot(1, 2, 2)
plt.imshow(cv2.cvtColor(test_shi_tomasi, cv2.COLOR_BGR2RGB))
plt.title("test1.jpg - Shi-Tomasi 角点检测(绿色标记)")
plt.axis("off")
plt.tight_layout()
plt.show()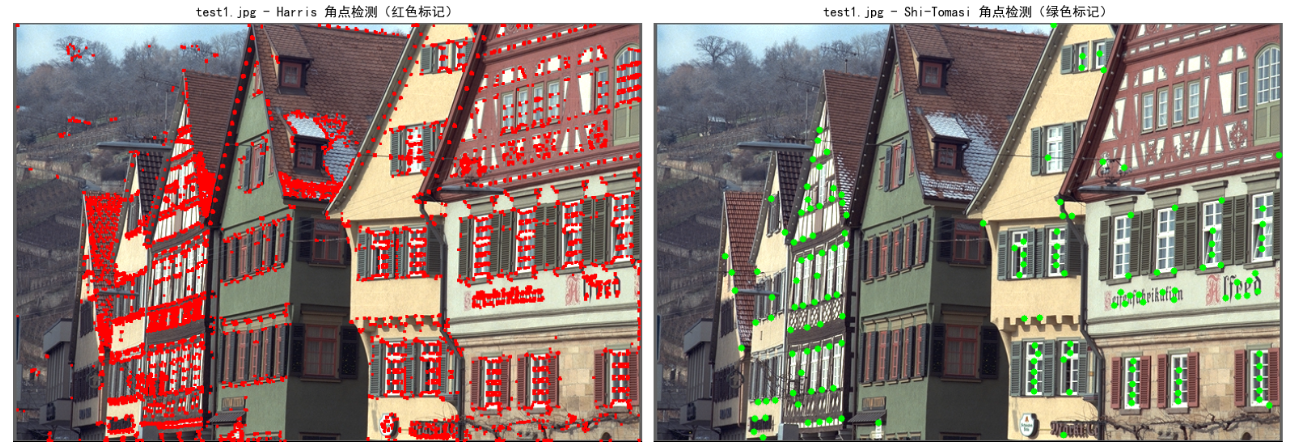
二、结果分析
1. 红点多绿点少的原因
红点(Harris)多、绿点(Shi-Tomasi)少且看似"不全",本质是两种算法的角点判定逻辑、筛选机制不同,Harris是"无差别标记高响应区域",Shi-Tomasi是"精准筛选高质量角点",并非Shi-Tomasi检测能力不足,而是它主动舍弃了低质量候选点。
2. 具体细节拆解
- Harris红点多的原因:Harris通过阈值筛选全图像素的响应值,只要像素响应超过阈值就会被标记为红色,且没有"角点间最小距离"的限制,不仅会标记真正的角点,还会把纹理丰富的边缘、局部高对比度区域也标记出来,甚至同一角点周围的多个像素都会被同时标记,最终形成成片、密集的红点。
- Shi-Tomasi绿点少且"不全"的原因 :Shi-Tomasi有两层严格筛选,一是通过
quality_level设定质量阈值,只保留特征值最小值较高的高质量角点,过滤掉边缘、低对比度区域的低质量候选点;二是通过max_corners(最大角点数)和min_distance(角点最小间距)做进一步限制,既不会超过设定的角点数量上限,也不允许角点在小范围内密集分布,主动舍弃了大量"冗余"和"低质量"点,所以绿点更少、更稀疏,看起来"不全",但实际上是更精准的有效角点。
3. 总结
- 红点多是Harris无额外去重和质量筛选,标记了大量包含冗余、低质量区域的高响应像素;绿点少是Shi-Tomasi多层筛选,只保留高质量、非冗余的核心角点。
- Shi-Tomasi的"不全"是相对Harris的"冗余标记"而言,并非漏检有效角点,反而这种"挑食"的特性让它更适合后续的特征匹配、光流跟踪等任务。
Ⅴ、角点检测算法在图像拼接的应用
在上一部分内容中,我们已经详细拆解了 Harris 角点检测的核心原理、实现逻辑以及它为何能成为计算机视觉中特征点提取的经典方案。理论的价值终究要落地到实战,而图像拼接正是 Harris 角点检测最直观、最实用的应用场景之一。
相比于单纯的角点提取,图像拼接需要将 Harris 角点检测与特征描述、特征匹配、单应性矩阵计算、图像融合等技术串联起来,形成一套完整的自动化流程。
python
import cv2
import numpy as np
import matplotlib.pyplot as plt
plt.rcParams["font.sans-serif"] = ["SimHei"] # 指定支持中文的黑体字体
plt.rcParams["axes.unicode_minus"] = False # 解决负号显示为方块的问题
def cv2_to_plt(img):
"""将 OpenCV BGR 格式图像转换为 Matplotlib 可显示的 RGB 格式"""
if len(img.shape) == 3: # 彩色图需要转换
return cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
else: # 灰度图无需转换
return img
# Harris 角点检测
def harris_corner_extract(gray_img, block_size=2, ksize=3, k=0.04, threshold=0.01):
gray_float = np.float32(gray_img)
harris_dst = cv2.cornerHarris(gray_float, blockSize=block_size, ksize=ksize, k=k)
harris_dst = cv2.dilate(harris_dst, None)
harris_thresh = threshold * harris_dst.max()
corners = []
h, w = gray_img.shape
for y in range(h):
for x in range(w):
if harris_dst[y, x] > harris_thresh:
kp = cv2.KeyPoint(x=float(x), y=float(y), size=10.0)
corners.append(kp)
return corners
# 两张图片拼接
def stitch_two_images(img1_path, img2_path):
img1 = cv2.imread(img1_path)
img2 = cv2.imread(img2_path)
if img1 is None or img2 is None:
raise Exception("图片读取失败!请检查图片路径是否正确,或图片格式是否支持(jpg/png 等)")
gray1 = cv2.cvtColor(img1, cv2.COLOR_BGR2GRAY)
gray2 = cv2.cvtColor(img2, cv2.COLOR_BGR2GRAY)
gray1_blur = cv2.GaussianBlur(gray1, (5, 5), 0)
gray2_blur = cv2.GaussianBlur(gray2, (5, 5), 0)
# 1. Harris 角点检测
kp1 = harris_corner_extract(gray1_blur)
kp2 = harris_corner_extract(gray2_blur)
print(f"第一张图提取到 {len(kp1)} 个 Harris 角点")
print(f"第二张图提取到 {len(kp2)} 个 Harris 角点")
# 2. 用 ORB 算法为角点生成特征描述子(实现角点匹配)
orb = cv2.ORB_create()
kp1, des1 = orb.compute(gray1_blur, kp1)
kp2, des2 = orb.compute(gray2_blur, kp2)
# 3. 特征匹配:暴力匹配器筛选优质匹配点
bf = cv2.BFMatcher(cv2.NORM_HAMMING, crossCheck=True)
matches = bf.match(des1, des2)
# 按匹配距离排序,取前 100 个优质匹配(距离越小,匹配度越高)
matches = sorted(matches, key=lambda x: x.distance)[:100]
# 4. 计算单应性矩阵(实现图像配准,RANSAC 算法去除异常匹配)
pts1 = np.float32([kp1[m.queryIdx].pt for m in matches]).reshape(-1, 1, 2)
pts2 = np.float32([kp2[m.trainIdx].pt for m in matches]).reshape(-1, 1, 2)
H, mask = cv2.findHomography(pts2, pts1, cv2.RANSAC, 5.0)
# 5. 图像变换与拼接:将 img2 映射到 img1 坐标空间,生成全景图
h1, w1 = img1.shape[:2]
h2, w2 = img2.shape[:2]
# 计算拼接后图像的尺寸(避免内容被裁剪)
img2_warped = cv2.warpPerspective(img2, H, (w1 + w2, h1))
# 融合两张图像,完成拼接
img2_warped[:h1, :w1] = img1
# 优化:去除右侧多余的黑色背景(仅保留有效内容)
stitch_result = img2_warped[:h1, :np.max(np.where(img2_warped.sum(axis=2) > 0)[1])]
# 生成匹配结果可视化图
match_img = cv2.drawMatches(img1, kp1, img2, kp2, matches[:50], None, flags=cv2.DrawMatchesFlags_NOT_DRAW_SINGLE_POINTS)
return stitch_result, match_img, img1, img2 # 额外返回原图,方便可视化对比
#--------------------------------------------------------------------------------------------------------
IMG_PATH_1 = "img1.jpg"
IMG_PATH_2 = "img2.jpg"
IMG_PATH_3 = "img3.jpg"
print("="*50)
print("开始执行 img1 与 img2 的拼接...")
try:
stitch_12, match_12, img1, img2 = stitch_two_images(IMG_PATH_1, IMG_PATH_2)
print("img1 与 img2 图像拼接成功!")
plt.figure(figsize=(20, 12))
plt.subplot(2, 2, 1)
plt.imshow(cv2_to_plt(img1))
plt.title("原图 img1", fontsize=14)
plt.axis("off")
plt.subplot(2, 2, 2)
plt.imshow(cv2_to_plt(img2))
plt.title("原图 img2", fontsize=14)
plt.axis("off")
plt.subplot(2, 2, 3)
plt.imshow(cv2_to_plt(match_12))
plt.title("img1 与 img2 角点匹配效果", fontsize=14)
plt.axis("off")
plt.subplot(2, 2, 4)
plt.imshow(cv2_to_plt(stitch_12))
plt.title("img1 与 img2 最终拼接结果", fontsize=14)
plt.axis("off")
plt.tight_layout()
plt.show()
except Exception as e:
print(f"img1 与 img2 拼接出错:{e}")
python
print("开始执行 img1 与 img3 的拼接...")
try:
stitch_13, match_13, img1, img3 = stitch_two_images(IMG_PATH_1, IMG_PATH_3)
print("img1 与 img3 图像拼接成功!")
plt.figure(figsize=(20, 12))
plt.subplot(2, 2, 1)
plt.imshow(cv2_to_plt(img1))
plt.title("原图 img1", fontsize=14)
plt.axis("off")
plt.subplot(2, 2, 2)
plt.imshow(cv2_to_plt(img3))
plt.title("原图 img3", fontsize=14)
plt.axis("off")
plt.subplot(2, 2, 3)
plt.imshow(cv2_to_plt(match_13))
plt.title("img1 与 img3 角点匹配效果", fontsize=14)
plt.axis("off")
plt.subplot(2, 2, 4)
plt.imshow(cv2_to_plt(stitch_13))
plt.title("img1 与 img3 最终拼接结果", fontsize=14)
plt.axis("off")
plt.tight_layout()
plt.show()
except Exception as e:
print(f"img1 与 img3 拼接出错:{e}")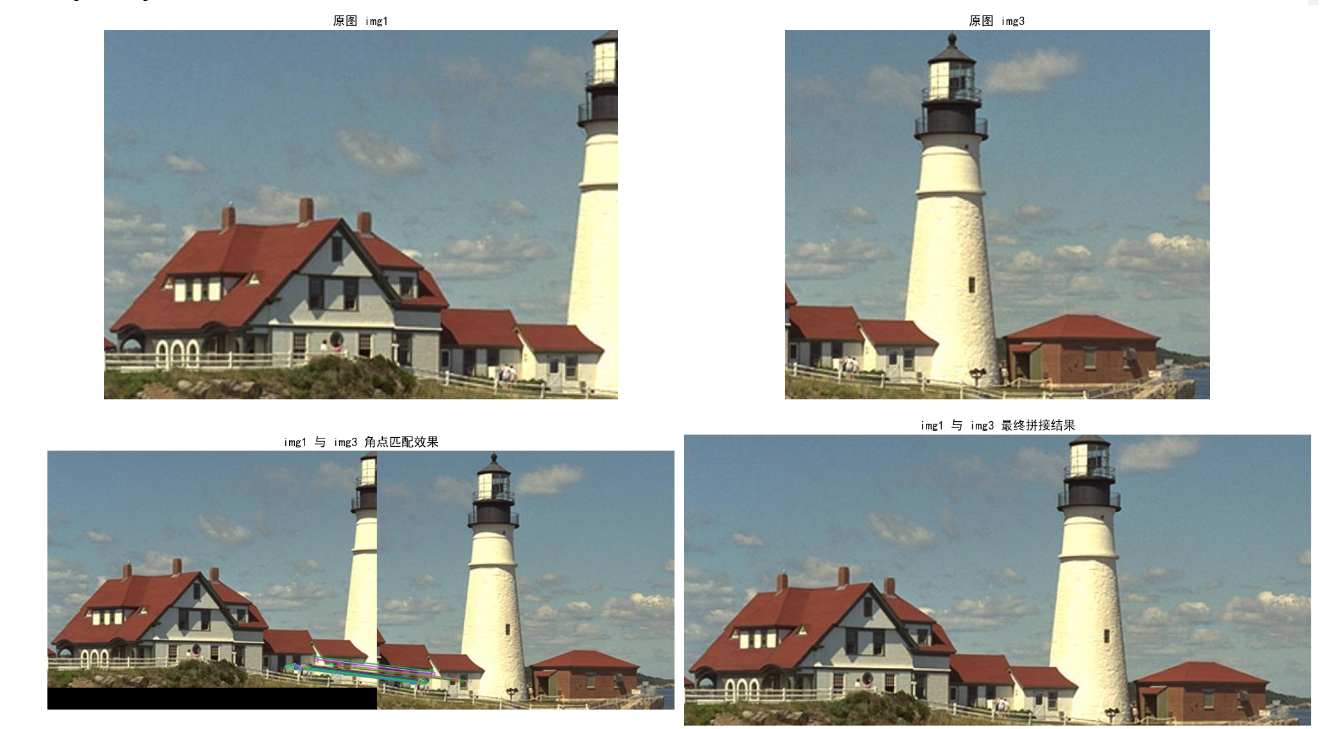
Ⅵ、总结
在本次角点检测的系列分享中,我们从理论到实践,对 Harris 和 Shi-Tomasi 两种经典算法进行了全方位的拆解与验证,下面为你梳理核心的知识总结与对比:
一、核心知识总结
-
Harris 角点检测
- 本质:通过检测图像中局部窗口的灰度变化率,识别出在多个方向上都有显著变化的角点。
- 核心思想:利用二次型矩阵 M 描述窗口灰度变化,通过构造响应值 R 判断角点、边缘或平坦区域。
- 特点:角点提取数量充足,具备旋转不变性,但存在冗余角点和边缘误标,且不具备尺度不变性。
-
Shi-Tomasi 角点检测
- 本质:对 Harris 算法的改进,通过优化角点判定准则,提升角点质量和稳定性。
- 核心思想:用矩阵 M 的最小特征值代替 Harris 的响应值 R,仅保留最小特征值大于阈值的角点。
- 特点:提取的角点质量更高、冗余更少,在图像拼接等场景中鲁棒性更强,是工程上更常用的角点检测方案。
-
图像拼接中的应用
- 角点检测是图像拼接的核心前置步骤,通过提取重叠区域的稳定角点,为后续特征匹配、单应性矩阵计算和图像配准提供关键依据。
- 在实际项目中,Shi-Tomasi 通常是首选,而 Harris 可作为补充方案,用于纹理稀疏场景以增加角点数量。
二、算法横向对比
| 特性 | Harris 角点检测 | Shi-Tomasi 角点检测 |
|---|---|---|
| 角点质量 | 参差不齐,存在冗余和误标 | 质量高,精准度和稳定性更强 |
| 角点数量 | 数量充足,覆盖范围广 | 数量适中,无冗余 |
| 计算复杂度 | 较低,实现简单 | 略高,但工程收益更明显 |
| 工程实用性 | 适合对精度要求不高的场景 | 图像拼接、目标跟踪等主流场景首选 |