配置定时器TIM2
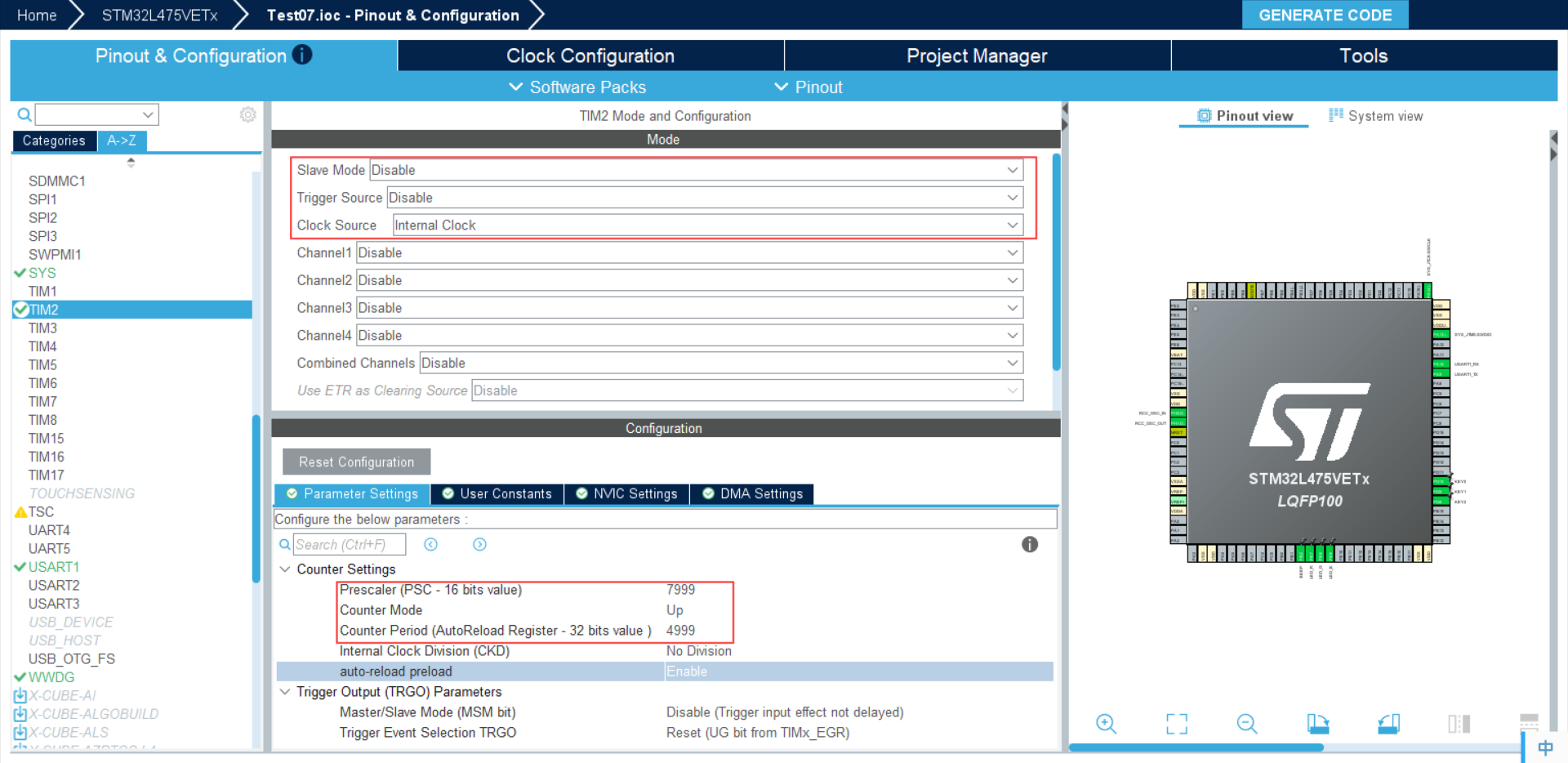
配置项解释:
Slave Mode : 正常情况下, TIM2的启动通过代码 HAL_TIM_Base_Start() 来控制, 但是开启Slave Mode之后, TIM2的核心操作将由外部信号触发, 如另一个定时器, GPIO电平等等, 外部触发源通过Trigger Source 来配置
Prescaler(PSC - 16 bits value) 通过设置PSC值, 确定定时器分频后的频率
这个值的目的是为了将输入到TIM2的时钟频率分频, 计算公式为
定时器计数频率 = 定时器输入频率 / (PSC值 + 1)
要确定定时器输入频率, 需要先看系统框图, 如下:
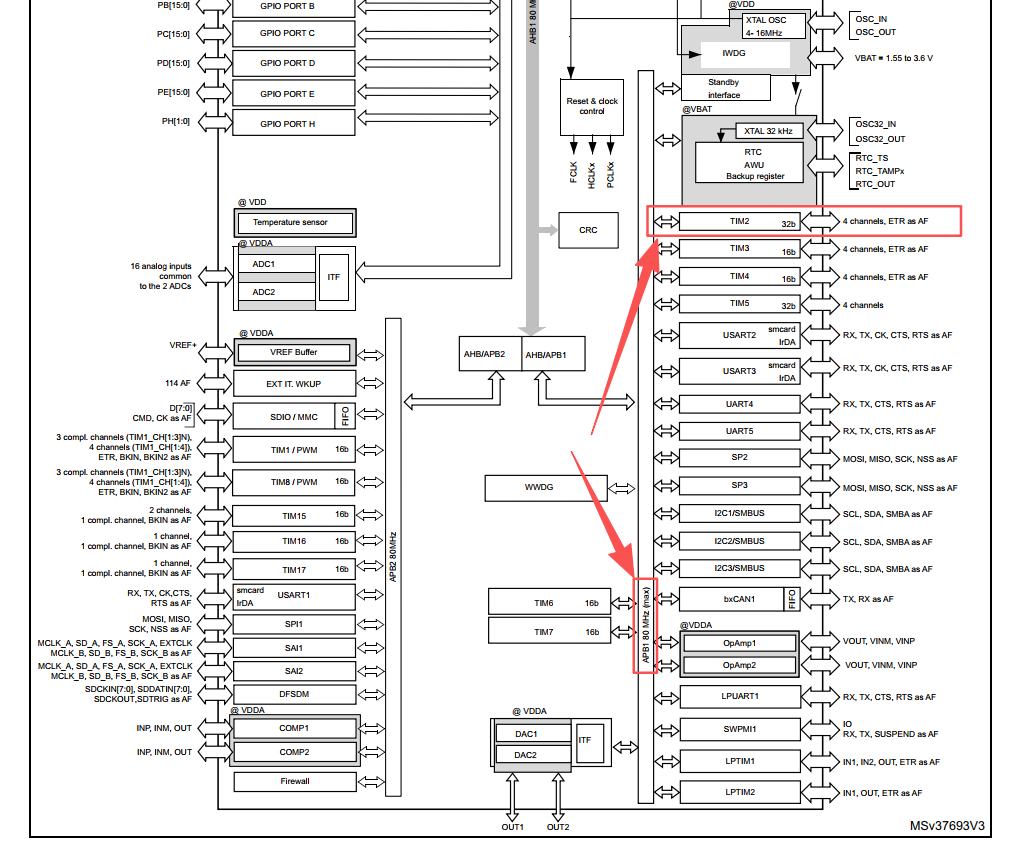
通过这里可以看到, TIM2定时器挂在APB1总线上, 而我们通过时钟树可知, APB1总线时钟为80MHz.
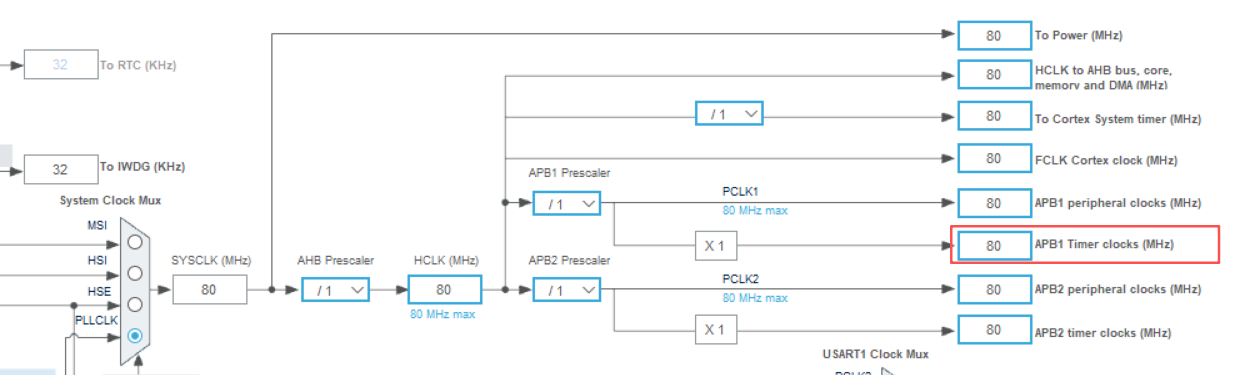
我们需要将TIM2的输入时钟设置为10kHz, 那么 10kHz = 80,000kHz / 8000
所以PSC = 8000 - 1 = 7999, 我们填写7999即可.
Counter Mode : 计数模式, Up Mode, 计数器从0开始, 每来一个计数时钟脉冲, CNT加1, 当计数器到达Auto-reload-value(ARR)是触发更新事件. Down Mode, 计数器从ARR值开始, 每个脉冲减1, 当CNTV减到0时, 触发更新事件
Counter Period (AutoReload Register - 32 bits value) : 计数边界, 这个值减到0时触发一次定时事件.
这个值和PSC共同确定了定时时长, 公式如下:
定时时长 = (PCS + 1) x (ARR + 1) / 输入时钟 = 8000 x 5000 / 80000000 = 0.5s
也就是说, 每0.5秒触发一次定时事件
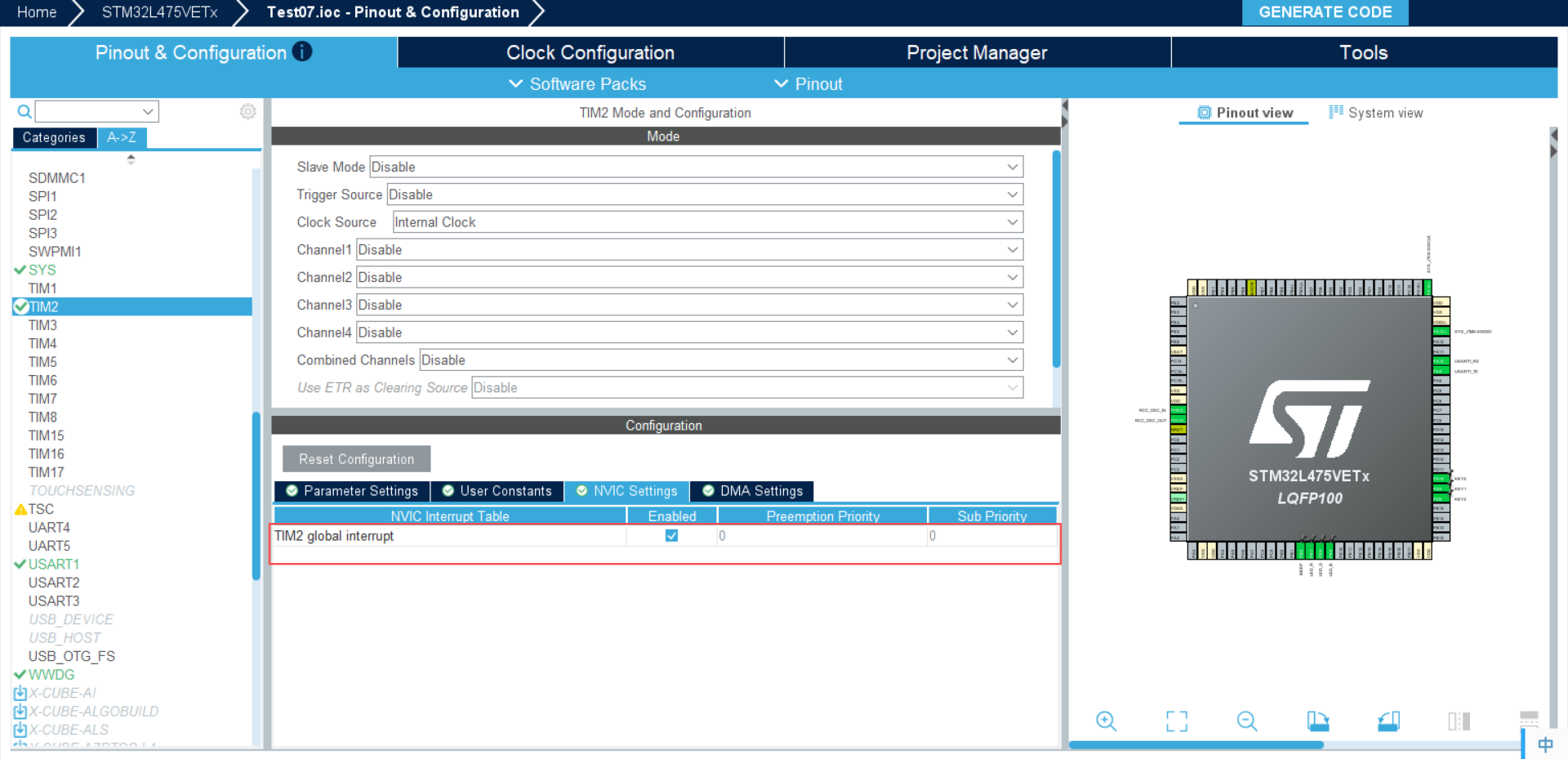
开启定时器中断
生成代码
tim.h
c
#ifndef __TIM_H__
#define __TIM_H__
#ifdef __cplusplus
extern "C" {
#endif
#include "main.h"
extern TIM_HandleTypeDef htim2;
void MX_TIM2_Init(void);
#ifdef __cplusplus
}
#endif
#endif /* __TIM_H__ */tim.c
c
#include "tim.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
TIM_HandleTypeDef htim2;
/* TIM2 init function */
void MX_TIM2_Init(void)
{
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
htim2.Instance = TIM2;
htim2.Init.Prescaler = 7999;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 4999;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
}
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* tim_baseHandle)
{
if(tim_baseHandle->Instance==TIM2)
{
/* TIM2 clock enable */
__HAL_RCC_TIM2_CLK_ENABLE();
/* TIM2 interrupt Init */
HAL_NVIC_SetPriority(TIM2_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(TIM2_IRQn);
}
}
void HAL_TIM_Base_MspDeInit(TIM_HandleTypeDef* tim_baseHandle)
{
if(tim_baseHandle->Instance==TIM2)
{
/* Peripheral clock disable */
__HAL_RCC_TIM2_CLK_DISABLE();
/* TIM2 interrupt Deinit */
HAL_NVIC_DisableIRQ(TIM2_IRQn);
}
}stm32l4xx_it.h
c
void TIM2_IRQHandler(void);stm32l4xx_it.c
c
extern TIM_HandleTypeDef htim2;
/**
* @brief This function handles TIM2 global interrupt.
*/
void TIM2_IRQHandler(void)
{
HAL_TIM_IRQHandler(&htim2);
}stm32l4xx_hal_conf.h
c
#define HAL_TIM_MODULE_ENABLEDmain.c
c
#include "tim.h"
int main(void)
{
// ...
MX_TIM2_Init();
// ...
}编写中断处理代码定时器翻转LED灯
main.c
c
// 测试定时器反转电平
HAL_TIM_Base_Start_IT(&htim2);
TRACE_INFO("Tagged the LED pin in interrupt");
while(1){
//...
}tim.h
clike
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim);tim.c
c
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) {
if (htim->Instance == TIM2) {
HAL_GPIO_TogglePin(GPIOE, LED_R_Pin); // 翻转红色LED电平
}
}运行效果
使用定时器反转LED效果演示