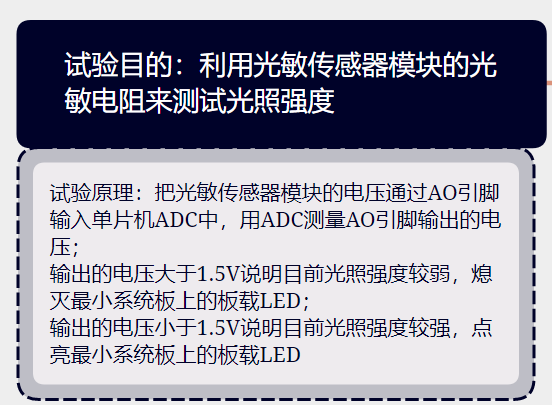
实验目的
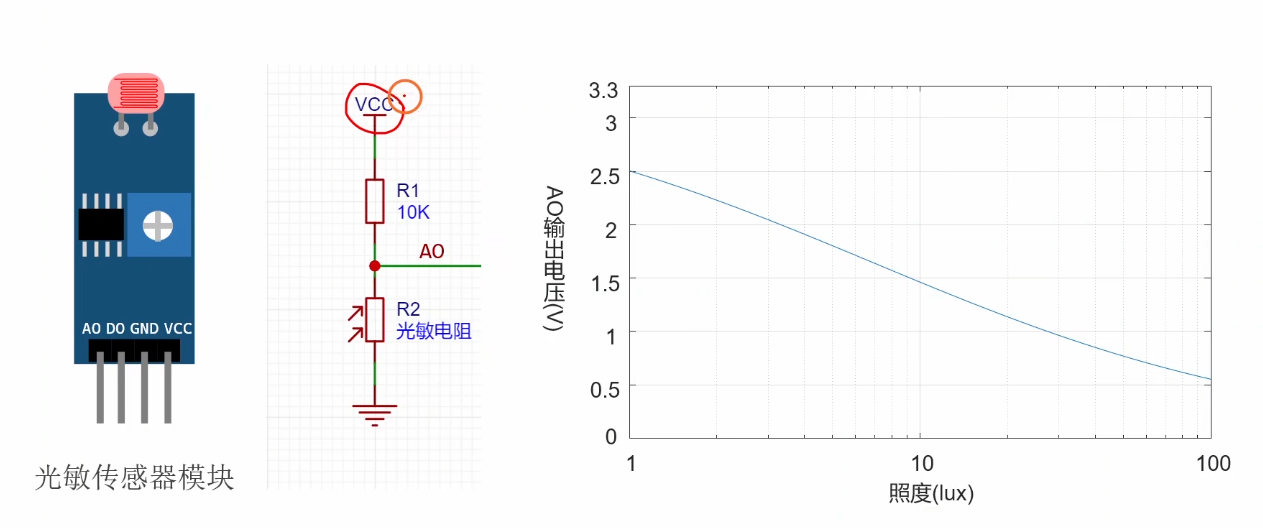
把AO引脚输入单片机ADC中,用ADC测量AO引脚输出的电压
输出的电压大于1.5V说明目前光照强度较弱,熄灭最小系统板上的板载LED
输出的电压小于1.5V说明目前光照强度较强,点亮最小系统板上的板载LED
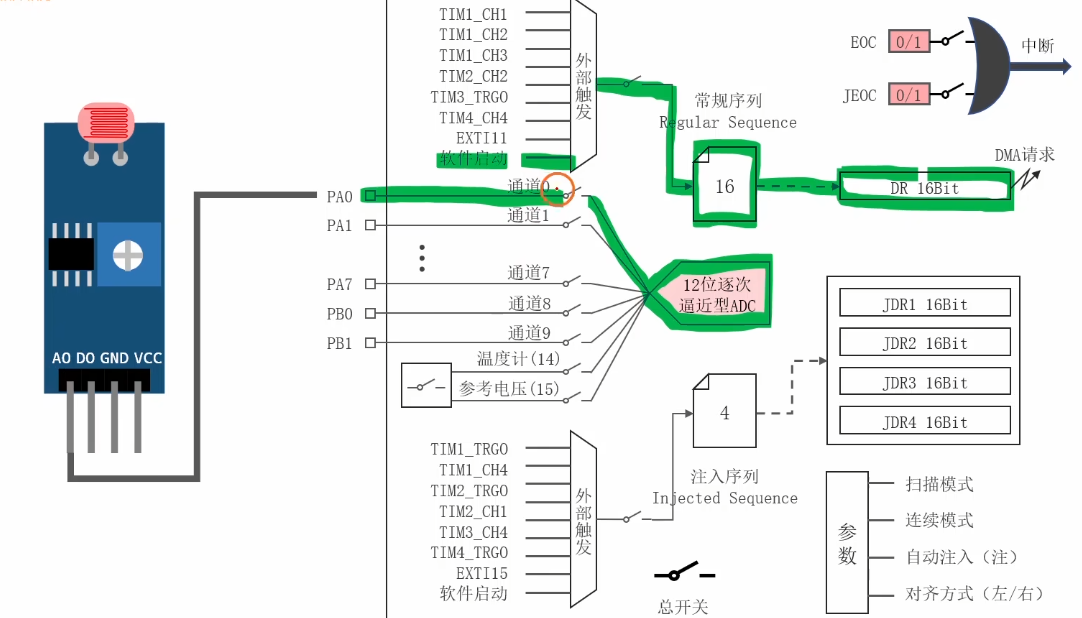
AO引脚和PA0引脚连接在一起。由于需要对通道0进行转换,把通道0的计划填写到常规序列第一行里。然后常规序列的外部触发信号向常规序列发送一个脉冲,这个脉冲启动常规序列,按照常规序列里的内容先闭合通道0开关,从PA0输入的模拟信号取一个点下来,然后断开通道0开关,12位逐次逼近型ADC把采到的点转换为数字信号,转换的结果保存到DR寄存器中。最后把DR寄存器里的结果读出来。结果就是A0输入的电压
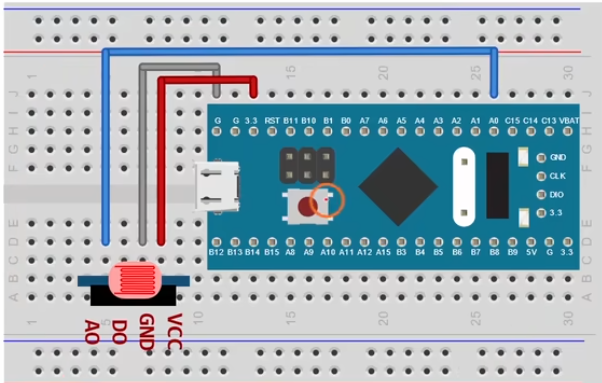
电路图
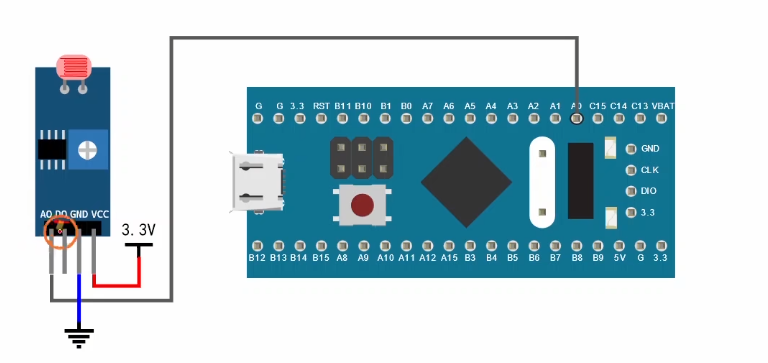
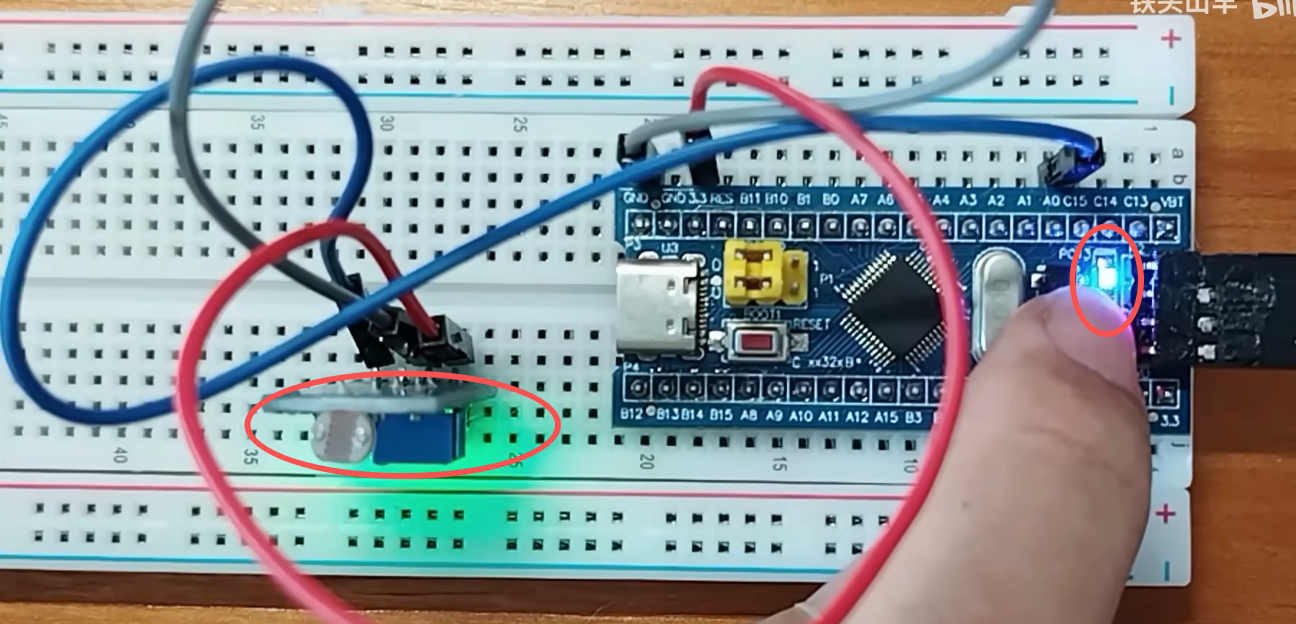
接线图
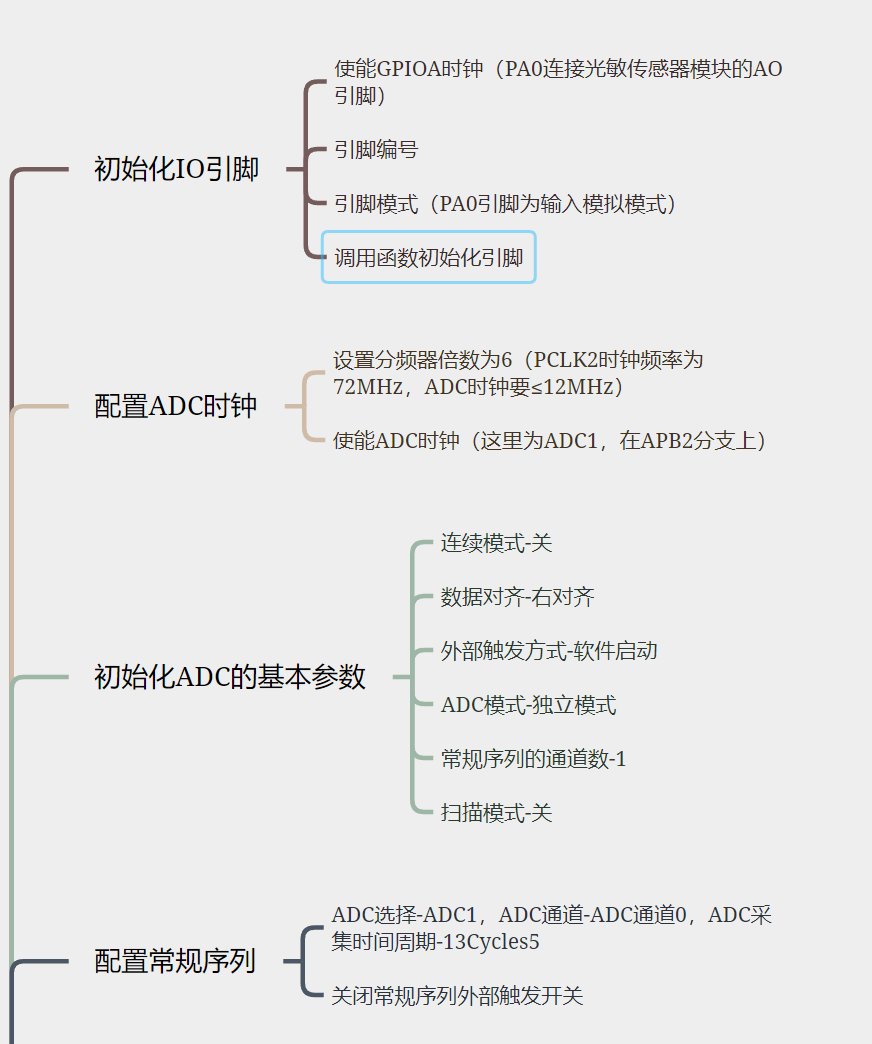
1.初始化IO引脚
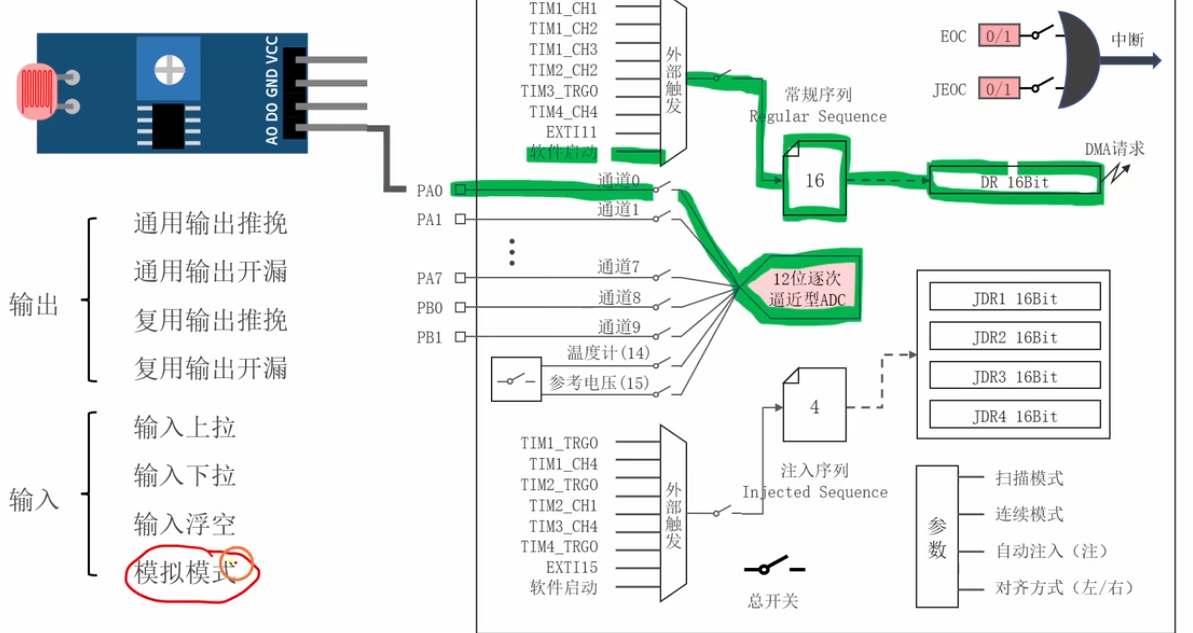
GPIO引脚模式有8种,输出4种,输入4种;输入模式中前三种都是针对数字信号,只有最后一种模拟模式针对模拟信号,所以这里PA0引脚为模拟模式
cs
#include "stm32f10x.h"
void App_ADC1_Init(void) ;
int main(void)
{
while(1)
{
}
}
void App_ADC1_Init(void)
{
//#1.初始化PA0引脚,模拟模式
RCC_APB2PeriphClockCmd (RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init (GPIOA, &GPIO_InitStruct);
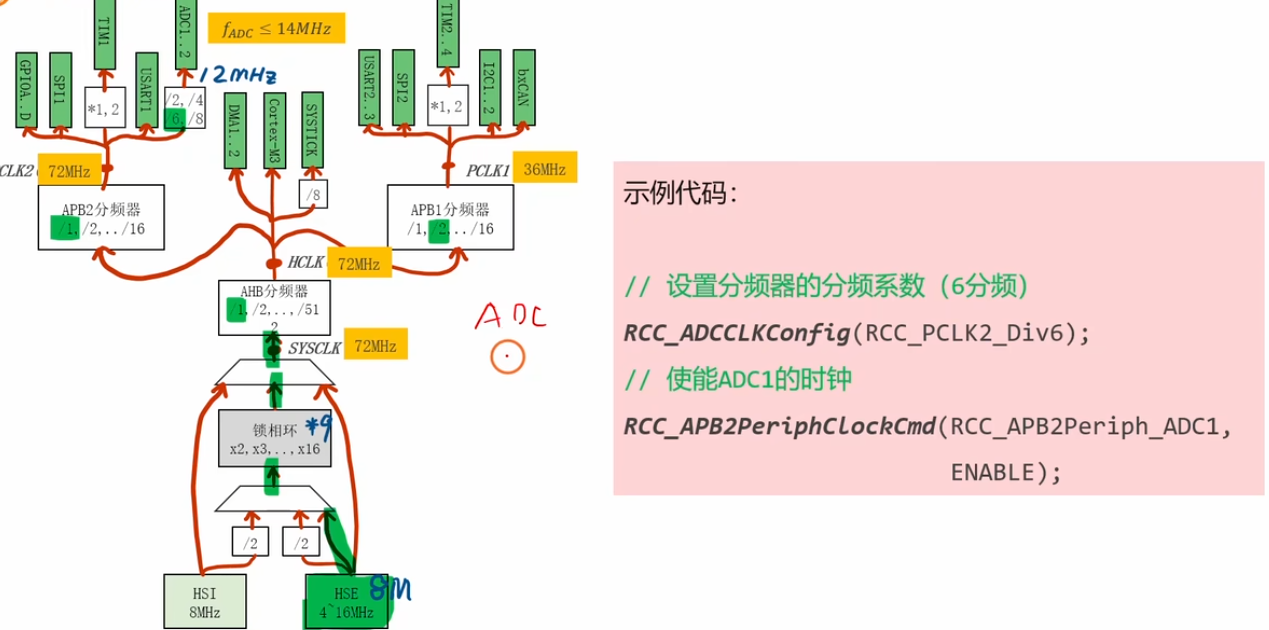
}2.配置ADC的时钟
cs
//#2.配置ADc模块的时钟
RCC_ADCCLKConfig (RCC_PCLK2_Div6) ; // 六分频
RCC_APB2PeriphClockCmd (RCC_APB2Periph_ADC1, ENABLE);3.ADC的编程接口
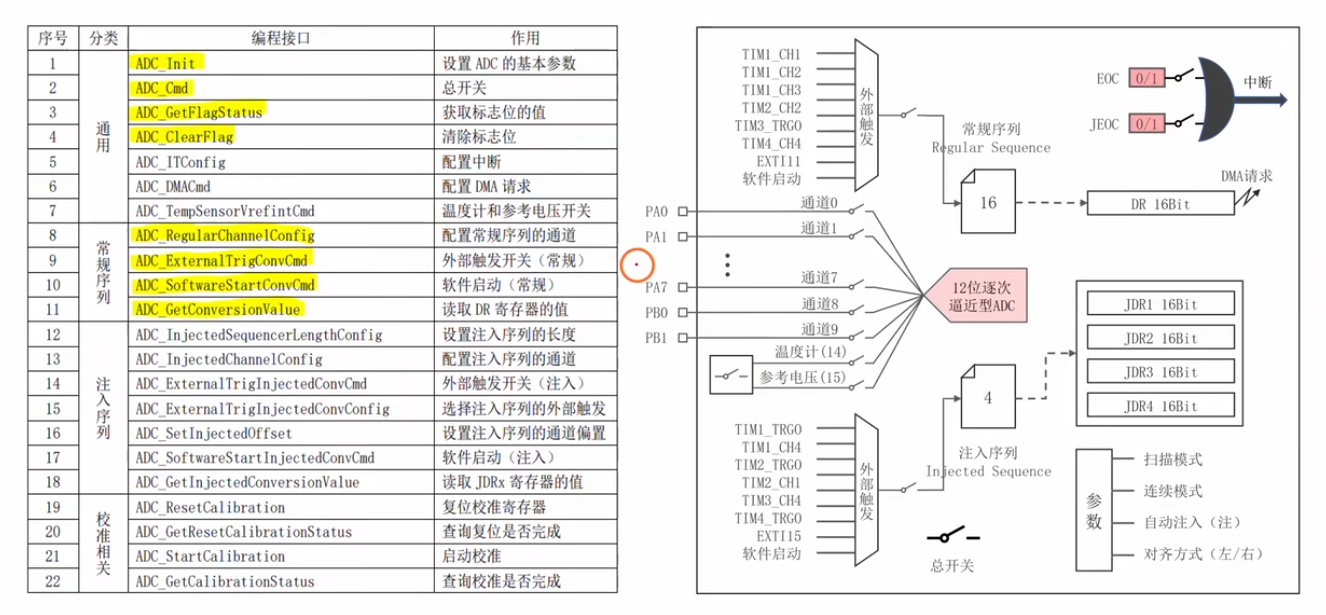
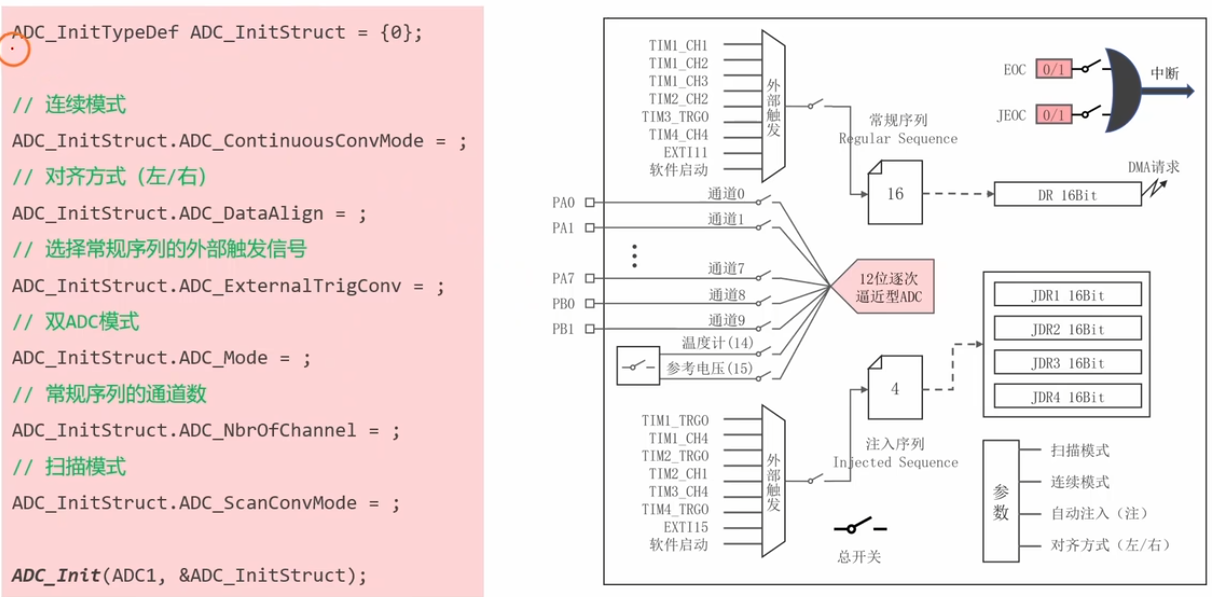
4.初始化ADC的基本参数
cs
//#3.初始化ADC的基本参数
ADC_InitTypeDef ADC_InitStruct = {0};
ADC_InitStruct.ADC_ContinuousConvMode = DISABLE; // 关连续模式
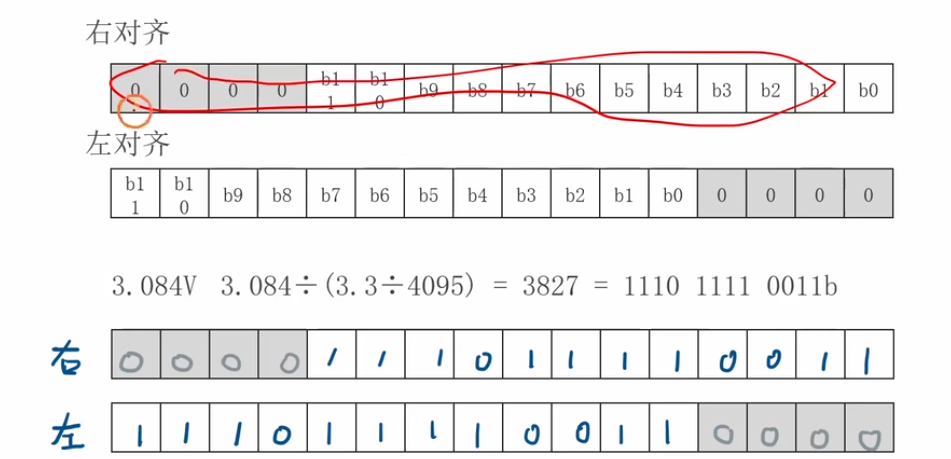
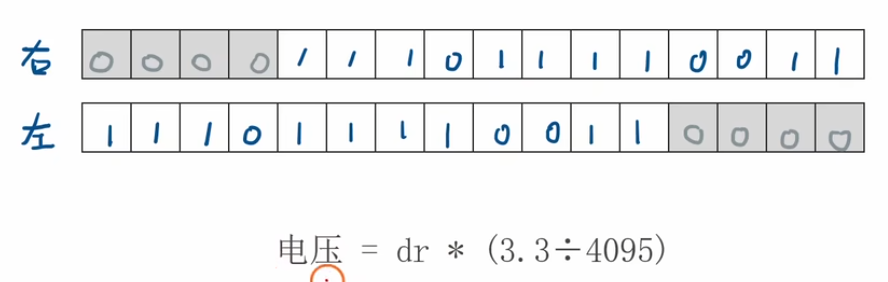
ADC_InitStruct.ADC_DataAlign = ADC_DataAlign_Right;// 右对齐
ADC_InitStruct.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; //软件启动
ADC_InitStruct.ADC_Mode = ADC_Mode_Independent;// 独立模式
ADC_InitStruct.ADC_NbrOfChannel = 1;// 常规序列1个通道
ADC_InitStruct.ADC_ScanConvMode = DISABLE;//关闭扫描模式
ADC_Init (ADC1, &ADC_InitStruct);5.配置常规序列
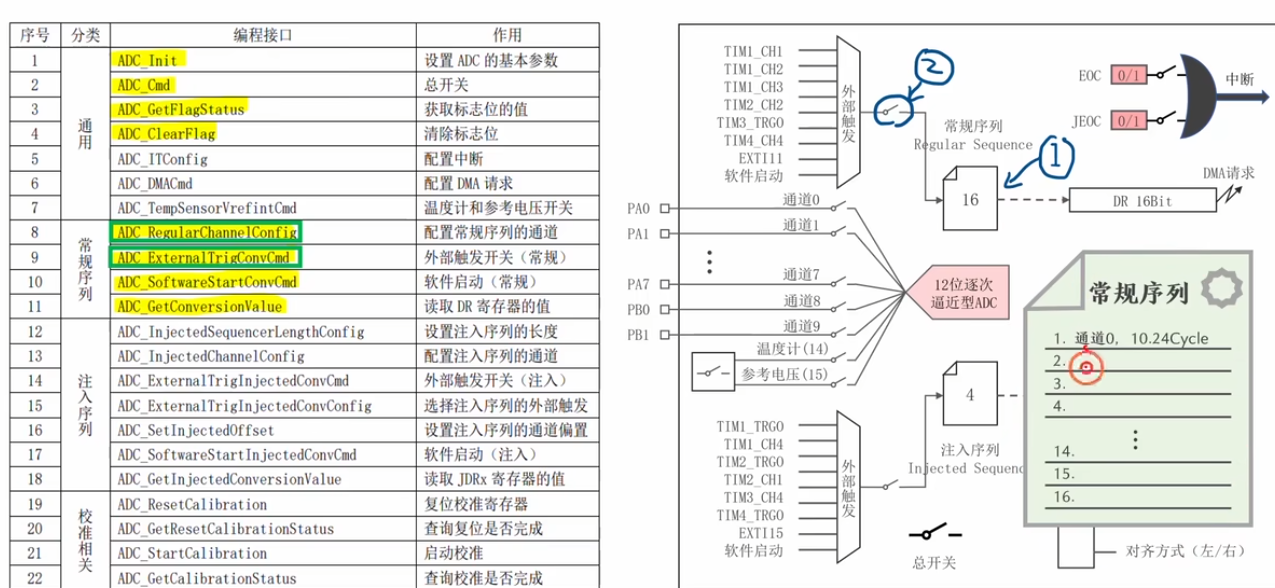
6.闭合ADC的总开关
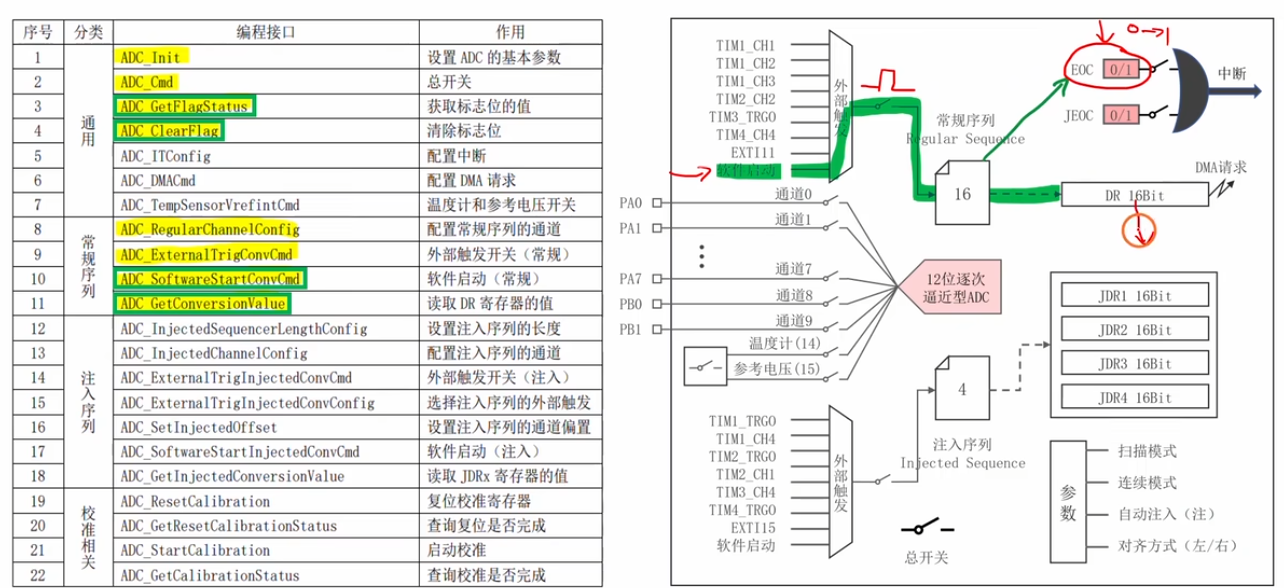
7.启动并读取转换结果
cs
while(1)
{
//#1.清除EOc标志位
ADC_ClearFlag(ADC1, ADC_FLAG_EOC);
//#2.通过软件启动的方式发送脉冲
ADC_SoftwareStartConvCmd(ADC1, ENABLE);
//#3.等待常规序列转换完成
while(ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC)== RESET);
//#4.读取转换的结果
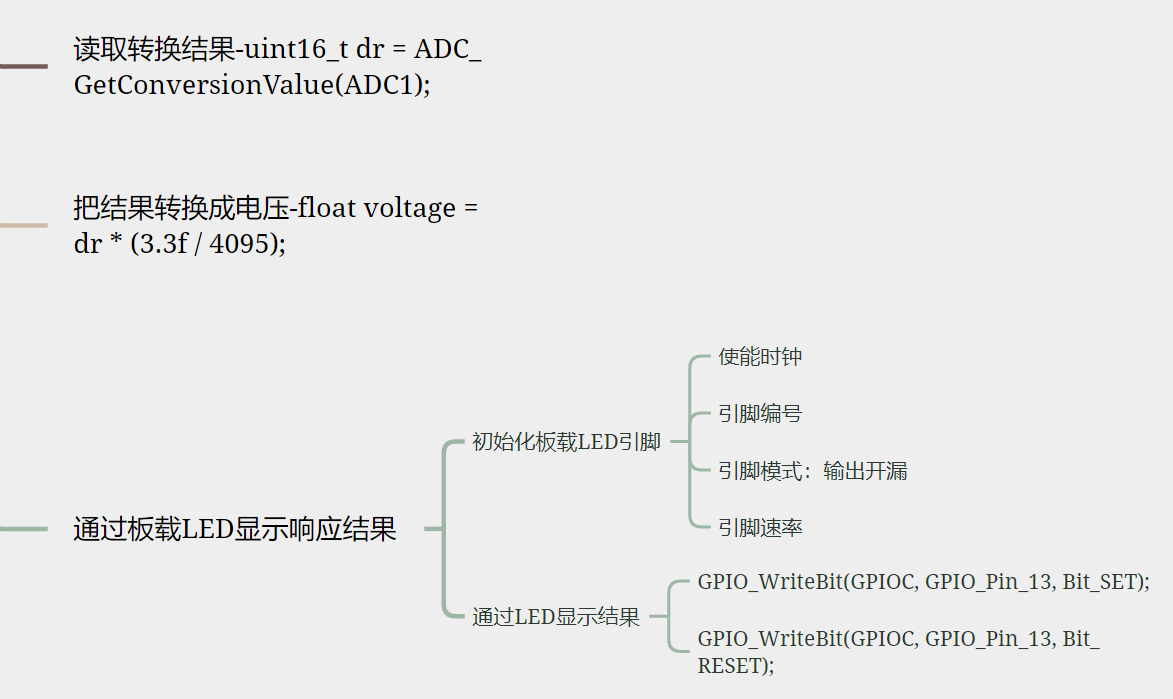
uint16_t dr = ADC_GetConversionValue(ADC1);
}DR里的值转化成电压值
cs
//#5.把结果转换成电压
float voltage = dr * (3.3f / 4095);用板载LED显示结果(
输出的电压大于1.5V说明目前光照强度较弱,熄灭最小系统板上的板载LED
输出的电压小于1.5V说明目前光照强度较强,点亮最小系统板上的板载LED
)
cs
if (voltage > 1.5)
{
GPIO_WriteBit(GPIOC, GPIO_Pin_13, Bit_SET);
}
else
{
GPIO_WriteBit(GPIOC, GPIO_Pin_13, Bit_RESET);
}总结:
总代码:
cs
#include "stm32f10x.h"
void App_ADC1_Init(void);
void App_OnBoardLED_Init(void);
int main(void)
{
App_ADC1_Init();
App_OnBoardLED_Init();
while(1)
{
//#1.清除EOc标志位
ADC_ClearFlag(ADC1, ADC_FLAG_EOC);
//#2.通过软件启动的方式发送脉冲
ADC_SoftwareStartConvCmd(ADC1, ENABLE);
//#3.等待常规序列转换完成
while(ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC)== RESET);
//#4.读取转换的结果
uint16_t dr = ADC_GetConversionValue(ADC1);
//#5.把结果转换成电压
float voltage = dr * (3.3f / 4095);
if (voltage > 1.5)
{
GPIO_WriteBit(GPIOC, GPIO_Pin_13, Bit_SET);
}
else
{
GPIO_WriteBit(GPIOC, GPIO_Pin_13, Bit_RESET);
}
}
}
void App_ADC1_Init(void)
{
//#1.初始化PA0引脚,模拟模式
RCC_APB2PeriphClockCmd (RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init (GPIOA, &GPIO_InitStruct);
//#2.配置ADc模块的时钟
RCC_ADCCLKConfig (RCC_PCLK2_Div6) ; // 六分频
RCC_APB2PeriphClockCmd (RCC_APB2Periph_ADC1, ENABLE);
//#3.初始化ADC的基本参数
ADC_InitTypeDef ADC_InitStruct = {0};
ADC_InitStruct.ADC_ContinuousConvMode = DISABLE; // 关连续模式
ADC_InitStruct.ADC_DataAlign = ADC_DataAlign_Right;// 右对齐
ADC_InitStruct.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; //软件启动
ADC_InitStruct.ADC_Mode = ADC_Mode_Independent;// 独立模式
ADC_InitStruct.ADC_NbrOfChannel = 1;// 常规序列1个通道
ADC_InitStruct.ADC_ScanConvMode = DISABLE;//关闭扫描模式
ADC_Init (ADC1, &ADC_InitStruct);
//#4.配置常规序列
ADC_RegularChannelConfig(ADC1, ADC_Channel_0, 1, ADC_SampleTime_13Cycles5) ;
ADC_ExternalTrigConvCmd(ADC1,ENABLE);
//#5.闭合ADC总开关
ADC_Cmd(ADC1,ENABLE);
}
void App_OnBoardLED_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_OD;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(GPIOC, &GPIO_InitStruct);
}